【学习笔记】用线段树维护区间计数问题
前言
简单的区间计数问题可能直接推式子就行了。
但有些问题必须要数据结构维护。线段树就是一个比较好的处理区间的数据结构。
Gym102222L


思路
满足条件的区间特征: max { a i } − min { a i } + 1 − c n t = 0 \max\{a_i\}-\min\{a_i\}+1-cnt=0 max{ai}−min{ai}+1−cnt=0,其中 c n t cnt cnt 代表区间内不同数字的个数。
考虑固定右端点,统计有多少个合法的左端点。
我们可以用线段树维护 m i n v = min { max { a i } − min { a i } − c n t } minv=\min\{\max\{a_i\}-\min\{a_i\}-cnt\} minv=min{max{ai}−min{ai}−cnt} 和 n u m = 有多少个区间左端点可以取到 m i n v num=有多少个区间左端点可以取到 minv num=有多少个区间左端点可以取到minv,答案就是 m i n v = − 1 minv=-1 minv=−1 时的 n u m num num
max { a i } \max\{a_i\} max{ai} 和 min { a i } \min\{a_i\} min{ai} 可以用两个单调栈维护。
代码
#include<bits/stdc++.h>
#define int long long
using namespace std;
const int N=1e6+7,inf=1e18;
struct seg
{int minv,tag,cnt;seg(){minv=tag=cnt=0;}
};
vector<seg> tr;
void update(int u)
{tr[u].minv=min(tr[u<<1].minv,tr[u<<1|1].minv);if(tr[u<<1].minv==tr[u<<1|1].minv){tr[u].cnt=tr[u<<1].cnt+tr[u<<1|1].cnt;}else if(tr[u].minv==tr[u<<1].minv){tr[u].cnt=tr[u<<1].cnt;}else if(tr[u].minv==tr[u<<1|1].minv){tr[u].cnt=tr[u<<1|1].cnt;}else{assert(false);}
}
void pushdown(int u)
{if(tr[u].tag){tr[u<<1].minv+=tr[u].tag; tr[u<<1|1].minv+=tr[u].tag;tr[u<<1].tag+=tr[u].tag; tr[u<<1|1].tag+=tr[u].tag;tr[u].tag=0;}
}
void build(int u,int st,int ed)
{if(st==ed){tr[u].cnt=1;return;}int mid=st+ed>>1;build(u<<1,st,mid);build(u<<1|1,mid+1,ed);update(u);
}
void modify(int u,int st,int ed,int l,int r,int x)
{if(l<=st&&ed<=r){tr[u].minv+=x;tr[u].tag+=x;return;}pushdown(u);int mid=st+ed>>1;if(mid>=l)modify(u<<1,st,mid,l,r,x);if(mid<r)modify(u<<1|1,mid+1,ed,l,r,x);update(u);
}
int query(int u,int st,int ed,int l,int r)
{if(l<=st&&ed<=r){return tr[u].minv==-1?tr[u].cnt:0;}pushdown(u);int mid=st+ed>>1;int res=0;if(mid>=l)res=query(u<<1,st,mid,l,r);if(mid<r)res+=query(u<<1|1,mid+1,ed,l,r);return res;
}
int O_o()
{int n;cin>>n;tr.assign(n+1<<2,seg());vector<int> a(n+1),ls(n+1);map<int,int> mp;for(int i=1; i<=n; i++){cin>>a[i];ls[i]=mp[a[i]];mp[a[i]]=i;}build(1,1,n);stack<array<int,2>> sx,sy;// decrease, increaseint ans=0;for(int i=1; i<=n; i++){int x=a[i];while(sx.size()&&x>sx.top()[0]){auto [v,id]=sx.top(); sx.pop();modify(1,1,n,sx.size()?(sx.top()[1]+1):1,id,x-v);}sx.push({x,i});while(sy.size()&&x<sy.top()[0]){auto [v,id]=sy.top(); sy.pop();modify(1,1,n,sy.size()?(sy.top()[1]+1):1,id,v-x);}sy.push({x,i});modify(1,1,n,ls[i]+1,i,-1);ans+=query(1,1,n,1,i);}return ans;
}
signed main()
{ios::sync_with_stdio(false); cin.tie(0); cout.tie(0);cout<<fixed<<setprecision(12);int T=1;cin>>T;for(int i=1; i<=T; i++){cout<<"Case #"<<i<<": "<<O_o()<<"\n";}
}
2024牛客暑期多校训练营7 D


思路
首先预处理每个点要往后走到哪才会出现 k k k 次和 k + 1 k+1 k+1 次
具体的,令 L i L_i Li 为从点 i i i 往后走,出现 k k k 次 a i a_i ai 的最近位置;令 R i R_i Ri 为从点 i i i 往后走,出现 k k k 次 a i a_i ai 的最远位置。
考虑倒着枚举左端点,对于每个左端点考虑有多少个右端点是合法的。
我们定义点 i i i 的合法区间为 [ L i , R i ] ∪ [ 1 , i − 1 ] [L_i,R_i]∪[1,i-1] [Li,Ri]∪[1,i−1] ( [ L i , R i ] [L_i,R_i] [Li,Ri] 中 a i a_i ai 出现了 k k k 次, [ 1 , i − 1 ] [1,i-1] [1,i−1] 不在 i i i 的管辖范围内),那么对于 i i i 为左端点的答案就是 [ i , n ] [i,n] [i,n] 中所有不同的数最前面的合法区间的交集。
也就是我们要维护一棵线段树,支持区间加、区间减、求区间最大值和最大值个数。这样做其实有些麻烦。
不难想到,合法区间的交集 = 不合法区间的并集的反集,求区间的并就完全可以像扫描线那样做。
代码
#include<bits/stdc++.h>
#define int long long
using namespace std;
const int N=1e6+7,inf=1e18;
struct seg
{int val,len;seg(){val=len=0;}
};
vector<seg> tr;
int n;
void update(int u,int st,int ed)
{if(tr[u].val>0){tr[u].len=ed-st+1;}else{if(st==ed){tr[u].len=0;return;}tr[u].len=tr[u<<1].len+tr[u<<1|1].len;}
}
void add(int u,int st,int ed,int l,int r,int x)
{if(l>r||l>n||r>n) return;if(l<=st&&ed<=r){tr[u].val+=x;update(u,st,ed);return;}
// pushdown(u);int mid=st+ed>>1;if(mid>=l)add(u<<1,st,mid,l,r,x);if(mid<r)add(u<<1|1,mid+1,ed,l,r,x);update(u,st,ed);
}
int query(int u,int st,int ed,int l,int r)
{if(l>r||l>n||r>n) return 0;if(l<=st&&ed<=r){return tr[u].len;}int mid=st+ed>>1;int res=0;if(mid>=l)res=query(u<<1,st,mid,l,r);if(mid<r)res+=query(u<<1|1,mid+1,ed,l,r);return res;
}
void O_o()
{int k;cin>>n>>k;map<int,vector<int>> mp;vector<int> a(n+1);for(int i=1; i<=n; i++){cin>>a[i];mp[a[i]].push_back(i);}tr.assign((n<<2)+1,seg());vector<array<int,2>> pos(n+1);vector<int> p,nxt(n+1);p.push_back(-1);for(auto [v,t]:mp){p.push_back(v);int m=t.size();for(int i=0; i<m; i++){int l,r;if(i+k-1>=m){l=n+1;}else l=t[i+k-1];if(i+k>=m){r=n+1;}else r=t[i+k];pos[t[i]]={l,r};if(i==m-1)nxt[t[i]]=n+1;else nxt[t[i]]=t[i+1];}}int ans=0;for(int i=n; i>=1; i--){if(nxt[i]!=n+1){auto [l,r]=pos[nxt[i]];add(1,1,n,nxt[i],l-1,-1);add(1,1,n,r,n,-1);}auto [l,r]=pos[i];add(1,1,n,i,l-1,1);add(1,1,n,r,n,1);int t=query(1,1,n,i,n);ans+=(n-i+1)-t;}cout<<ans<<"\n";
}
signed main()
{ios::sync_with_stdio(false); cin.tie(0); cout.tie(0);cout<<fixed<<setprecision(12);int T=1;cin>>T;while(T--){O_o();}
}
相关文章:
【学习笔记】用线段树维护区间计数问题
前言 简单的区间计数问题可能直接推式子就行了。 但有些问题必须要数据结构维护。线段树就是一个比较好的处理区间的数据结构。 Gym102222L 思路 满足条件的区间特征: max { a i } − min { a i } 1 − c n t 0 \max\{a_i\}-\min\{a_i\}1-cnt0 max{ai}…...

4章11节:用R做数据重塑,数据的特征缩放和特征可视化
由于数据往往复杂多样,其中不同的特征变量可能具有不同的数值范围,这使得特征缩放成为一个必要的步骤。例如,当我们要处理医学数据时,对于同一个患者,肺活量的变化范围可能在1000到5000之间,而体重指数(BMI)的变化范围则可能在10到50之间,其他一些生理指标甚至可能处于…...

LVS-NAT + LVS-DR
LVS 现在lvs已经是linux内核标准的一部分,使用lvs可以达到的技术目标是:通过linux达到负载均衡技术和linux操作系统实现一个高性能高可用的linux服务器集群,他具有良好的可靠性,可延展性和可操作性,从而以低廉的成本实…...

排序算法——插入排序
一、插入排序概念 直接插入排序(Insertion Sort)是一种简单的排序算法,它的工作原理类似于人们手动排序卡片的方式。该算法通过构建有序序列,对于未排序数据,在已排序序列中从后向前扫描,找到相应位置并插…...

重修设计模式-行为型-状态模式
重修设计模式-行为型-状态模式 先了解一下状态机的概念,状态机是软件编程中对一种状态场景的抽象表达,构成状态机三要素是:状态(State)、事件(Event)、动作(Action)&…...

网络安全知识渗透测试
渗透测试是一种模拟网络攻击,用于识别漏洞并制定规避防御措施的策略。及早发现缺陷使安全团队能够修复任何漏洞,从而防止数据泄露,否则可能会造成数十亿美元的损失。笔测试还有助于评估组织的合规性、提高员工对安全协议的认识、评估事件响应…...

我国卫星互联网产业集群崛起;1000万资金扶持 上海助推产业互联网平台跨越式发展;河南“数据要素×”行动实施方案发布 | 产业互联网观察第179期
我国卫星互联网产业集群崛起:千帆星座首批卫星发射成功 8月6日,中国版"星链"项目"千帆星座"(G60星链)首批18颗组网卫星在太原卫星发射中心成功发射升空。这些卫星采用上海格思航天自主研发的可堆叠型平板卫星…...

《RT-DETR》论文笔记
原文出处 [2304.08069] DETRs Beat YOLOs on Real-time Object Detection (arxiv.org)https://arxiv.org/abs/2304.08069 原文笔记 What DETRs Beat YOLOs on Real-time Object Detection 1、设计了一种高效的混合编码器,通过解耦尺度内交互和跨尺度融合来提高…...

输出Docker容器的启动命令行脚本
当Docker容器启动后,如果忘记启动参数,比如目录挂载、端口映射等,可以通过Portainer等容器管理工具查看。但是,有时希望能获取容器启动的命令行,因为需要再启动一个类似容器,怎么办呢? 有一款工…...

Dubbo 快速掌握 这篇就够了
1. Dubbo概述 Dubbo 是一款高性能、轻量级的开源Java RPC框架,由阿里巴巴公司开发并在2011年开源。它主要用于解决分布式系统中服务之间的通信问题,支持多种协议,如Dubbo、HTTP、Hessian等,具有服务注册、服务发现、负载均衡、故…...

【每日刷题】Day100
【每日刷题】Day100 🥕个人主页:开敲🍉 🔥所属专栏:每日刷题🍍 🌼文章目录🌼 1. 【模板】堆_牛客题霸_牛客网 (nowcoder.com) 2. 【模板】链表_牛客题霸_牛客网 (nowcoder.com) 3…...

网络协议九 应用层 HTTPS
一 什么是 HTTPS 二 什么是 SSL/TLS 协议 ,TLS 是 SSL 升级后的名字 三. TLS 协议 工作在那一层 四 。OpenSSL 是 SSL/TLS协议的开源实现。 五。重点 HTTPS 的通讯过程 六 TLS 1.2 的连接过程 1. client hello 是浏览器发送给服务器的第一条信息, 是客户…...

【ArrayList】JDK1.8源码详细注释 以及如何实现线程安全的链表
ArrayList(JDK8) ArrayList有四个内部类,成员内部类Itr,成员内部类ListItr,静态内部类SubList,ArrayListSpliterator(暂时用不到)Itr是Iterator的实现类,支持正向遍历,ArrayList的i…...

[python]rasterio运行代码警告proj_create_from_database: Cannot find proj.db
这个报错要分原因还有rasterio版本讨论,因此官方给出了十分具体回答 Frequently Asked Questions What does "RasterioIOError: file.ecw not recognized as a supported file format." mean? This exception is raised when none of rasterios format …...

ThinkPHP5.1.C+CmsEasy-SQL注入
目录 1、ThinkPHP 中存在的 SQL注入 漏洞( select 方法注入) 1.1环境配置 1.1.1将 composer.json 文件的 require 字段设置成如下: 1.1.2设置application/index/controller/Index.php 文件 1.1.3在 application/database.php 文件中配置…...

Python 绘图进阶之词云图:文本数据的可视化艺术
Python 绘图进阶之词云图:文本数据的可视化艺术 引言 在数据科学和自然语言处理领域,词云图(Word Cloud)是一种常用的可视化工具。它通过直观的图形展示文本数据中的高频词汇,使得我们能够快速抓住文本内容的核心主题…...
【Windows】Q-Dir(资源管理器)软件介绍
软件介绍 Q-Dir是一款免费的文件管理器软件,它可以让您更方便地浏览和管理计算机上的文件和文件夹。与Windows自带的资源管理器相比,Q-Dir具有更多的功能和选项。 安装教程 软件下载完成,解压软件。 点击Q-Dir.exe即可打开软件。 功能…...
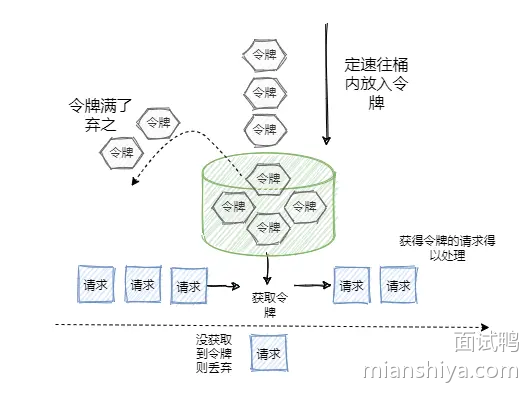
什么是令牌桶算法?工作原理是什么?使用它有哪些优点和注意事项?
大家好,我是鸭鸭! 此答案节选自鸭鸭最近弄的面试刷题神器面试鸭 ,更多大厂常问面试题,可以点击下面的小程序进行阅读哈! 目前这个面试刷题小程序刚出,有网页和小程序双端可以使用! 回归面试题…...

C++-类与对象(中上篇)
一、目标 1. 类的 6 个默认成员函数 2. 构造函数 3. 析构函数 二、对目标的介绍 1. 类的6个默认成员函数 如果一个类中什么成员都没有,简称为空类。 空类中真的什么都没有吗?并不是,任何类在什么都不写时,编译器会自动生…...

链表 206.反转链表
一般方法 不需要一个个来回换,只需要改变链表的指向,即可完成 一个链表的头节点,也代表了整个链表 class Solution {public ListNode reverseList(ListNode head) {ListNode temp;ListNode cur head;ListNode pre null;while(cur ! null…...

告别轮询!用DSP28335 GPIO中断实现矩阵按键响应,效率提升实战指南
DSP28335 GPIO中断驱动矩阵按键:从轮询到事件驱动的实战重构 在嵌入式系统开发中,按键响应速度往往直接影响用户体验和系统实时性。传统轮询方式虽然实现简单,但在处理矩阵键盘时会导致CPU资源浪费和响应延迟。我曾在一个工业控制面板项目中&…...

X-TRACK GPS自行车码表:从硬件选型到系统集成的工程决策与验证
X-TRACK GPS自行车码表:从硬件选型到系统集成的工程决策与验证 【免费下载链接】X-TRACK A GPS bicycle speedometer that supports offline maps and track recording 项目地址: https://gitcode.com/gh_mirrors/xt/X-TRACK 在嵌入式设备开发领域ÿ…...

Python 爬虫数据处理:富文本爬虫内容格式化还原
前言 互联网平台发布的文章、资讯、公众号推文、论坛帖子、商品详情、教程文案等内容,普遍以富文本形式存在,融合文字、段落层级、换行缩进、加粗引用、列表排版、超链接、分段结构等多种格式元素。普通爬虫仅能抓取原始 HTML 源码或纯文本内容…...

为什么顶尖投行/律所/药企已将Perplexity设为默认搜索端口?:拆解其底层Provenance Graph引擎与ChatGPT RAG架构的7层信任差
更多请点击: https://intelliparadigm.com 第一章:Perplexity与ChatGPT搜索范式的根本性分野 Perplexity 和 ChatGPT 代表两种截然不同的信息交互哲学:前者以**可验证的溯源驱动**为核心,后者以**生成连贯性优先**为设计原则。这…...

CANN/ops-nn RMS归一化动态量化算子
AddRmsNormDynamicQuantV2 【免费下载链接】ops-nn 本项目是CANN提供的神经网络类计算算子库,实现网络在NPU上加速计算。 项目地址: https://gitcode.com/cann/ops-nn 产品支持情况 产品是否支持Ascend 950PR/Ascend 950DTAtlas A3 训练系列产品/Atlas A3 推…...

NRF52833开发实战:从零构建Keil工程与一键烧录
1. 环境搭建:从零准备NRF52833开发工具链 第一次接触NRF52833开发时,最头疼的就是环境配置。记得我刚开始用Keil调试蓝牙项目时,光是找齐所有安装包就花了整整两天。现在把完整工具链的获取方式和避坑要点整理给你,新手照着做半小…...
)
STM32F4当USB主机,驱动CH340串口模块的保姆级调试笔记(附源码)
STM32F4作为USB主机驱动CH340模块的深度实践指南 在嵌入式开发中,USB主机功能扩展串口资源是常见需求。当标准CDC类设备无法满足特殊场景时,驱动像CH340这样的厂商自定义设备就成了一项必备技能。本文将带您深入探索STM32F4系列微控制器作为USB主机与CH3…...

AI编程协作实战:从提示工程到全周期开发工作流
1. 项目概述:从零开始的AI编程启蒙最近在GitHub上看到一个挺有意思的项目,叫jnMetaCode/ai-coding-101。光看名字,你大概能猜到它和AI编程有关,但“101”这个后缀又暗示着它的入门属性。作为一个在代码堆里摸爬滚打多年的老码农&a…...

iOS激活锁终极绕过指南:开源工具applera1n的完整解决方案
iOS激活锁终极绕过指南:开源工具applera1n的完整解决方案 【免费下载链接】applera1n icloud bypass for ios 15-16 项目地址: https://gitcode.com/gh_mirrors/ap/applera1n 面对iOS设备激活锁的困扰,你是否曾为无法使用二手iPhone而烦恼&#x…...

智算解构像素 实景生长孪生:摒弃人工建模冗余流程,开辟视频孪生快速规模化落地路径
智算解构像素 实景生长孪生副标题:摒弃人工建模冗余流程,开辟视频孪生快速规模化落地路径前言传统数字孪生落地始终深陷人工建模周期长、成本高、流程冗余、更新滞后的固化瓶颈。依赖外业测绘、人工描模、素材拼接、后期修模,环节繁琐、交付周…...