Golang | Leetcode Golang题解之第352题将数据流变为多个不相交区间
题目:

题解:
type SummaryRanges struct {*redblacktree.Tree
}func Constructor() SummaryRanges {return SummaryRanges{redblacktree.NewWithIntComparator()}
}func (ranges *SummaryRanges) AddNum(val int) {// 找到 l0 最大的且满足 l0 <= val 的区间 interval0 = [l0, r0]interval0, has0 := ranges.Floor(val)if has0 && val <= interval0.Value.(int) {// 情况一return}// 找到 l1 最小的且满足 l1 > val 的区间 interval1 = [l1, r1]// 在有序集合中,interval1 就是 interval0 的后一个区间interval1 := ranges.Iterator()if has0 {interval1 = ranges.IteratorAt(interval0)}has1 := interval1.Next()leftAside := has0 && interval0.Value.(int)+1 == valrightAside := has1 && interval1.Key().(int)-1 == valif leftAside && rightAside {// 情况四interval0.Value = interval1.Value().(int)ranges.Remove(interval1.Key())} else if leftAside {// 情况二interval0.Value = val} else if rightAside {// 情况三right := interval1.Value().(int)ranges.Remove(interval1.Key())ranges.Put(val, right)} else {// 情况五ranges.Put(val, val)}
}func (ranges *SummaryRanges) GetIntervals() [][]int {ans := make([][]int, 0, ranges.Size())for it := ranges.Iterator(); it.Next(); {ans = append(ans, []int{it.Key().(int), it.Value().(int)})}return ans
}相关文章:
Golang | Leetcode Golang题解之第352题将数据流变为多个不相交区间
题目: 题解: type SummaryRanges struct {*redblacktree.Tree }func Constructor() SummaryRanges {return SummaryRanges{redblacktree.NewWithIntComparator()} }func (ranges *SummaryRanges) AddNum(val int) {// 找到 l0 最大的且满足 l0 < val…...

Ubuntu安装mysql 以及远程连接mysql Windows—适合初学者的讲解(详细)
目录 准备工作 一.Xshell中操作 (1)在虚拟机中安装mysql (2)连接Windows数据库 (3)进入linux数据库。 (4)修改mysql配置文件 二.Windows命令窗口操作 需要软件虚拟机,Xsh…...

【数学建模】MATLAB快速入门
文章目录 1. MATLAB界面与基本操作1.1 MATLAB的基本操作 2. MATLAB字符串和文本2.1 string变量2.2 char变量 3. MATLAB的矩阵运算 1. MATLAB界面与基本操作 初始界面: 刚开始的界面只要一个命令行窗口,为了使编辑界面出现我们需要新建一个文件ÿ…...

【ubuntu24.04】k8s 部署5:配置calico 镜像拉取
kubeadm - 中国大陆版建议:初始化Kubeadm –apiserver-advertise-address 这个地址是本地用于和其他节点通信的IP地址 –pod-network-cidr pod network 地址空间 sudo kubeadm init --image-repository registry.aliyuncs.com/google_containers --apiserver-advertise-add…...

Elasticsearch 的数据备份与恢复
在生产环境中,数据的安全性和可靠性至关重要。对于基于 Elasticsearch 的系统而言,数据备份与恢复是确保数据完整性、应对灾难恢复的关键操作。本文将详细介绍 Elasticsearch 中如何进行数据备份与恢复,帮助管理员构建一个可靠的数据保护策略…...

Ps:首选项 - 暂存盘
Ps菜单:编辑/首选项 Edit/Preferences 快捷键:Ctrl K Photoshop 首选项中的“暂存盘” Scratch Disks选项卡通过合理配置和管理暂存盘,可以显著提高 Photoshop 的运行性能,特别是在处理复杂的设计项目或大型图像文件时。选择合适…...

力扣217题详解:存在重复元素的多种解法与复杂度分析
在本篇文章中,我们将详细解读力扣第217题“存在重复元素”。通过学习本篇文章,读者将掌握如何使用多种方法来解决这一问题,并了解相关的复杂度分析和模拟面试问答。每种方法都将配以详细的解释,以便于理解。 问题描述 力扣第217…...

享元模式:轻量级对象共享,高效利用内存
享元模式(Flyweight Pattern)是一种结构型设计模式,用于减少对象数量、降低内存消耗和提高系统性能。它通过共享相似对象的内部状态,减少重复创建的对象。下面将具体介绍享元模式的各个方面: 组成 抽象享元࿰…...

人工智能-自然语言处理(NLP)
人工智能-自然语言处理(NLP) 1. NLP的基础理论1.1 语言模型(Language Models)1.1.1 N-gram模型1.1.2 词嵌入(Word Embeddings)1.1.2.1 词袋模型(Bag of Words, BoW)1.1.2.2 TF-IDF&a…...

基于UE5和ROS2的激光雷达+深度RGBD相机小车的仿真指南(三)---创建自定义激光雷达Componet组件
前言 本系列教程旨在使用UE5配置一个具备激光雷达深度摄像机的仿真小车,并使用通过跨平台的方式进行ROS2和UE5仿真的通讯,达到小车自主导航的目的。本教程默认有ROS2导航及其gazebo仿真相关方面基础,Nav2相关的学习教程可以参考本人的其他博…...

C++ 设计模式——策略模式
策略模式 策略模式主要组成部分例一:逐步重构并引入策略模式第一步:初始实现第二步:提取共性并实现策略接口第三步:实现具体策略类第四步:实现上下文类策略模式 UML 图策略模式的 UML 图解析 例二:逐步重构…...

【书生大模型实战营(暑假场)闯关材料】基础岛:第3关 浦语提示词工程实践
1.配置环境时遇到的问题 注意要使用terminal,而不是jupyter。 否则退出TMUX会话时,会出问题。 退出TMUX会话命令如下: ctrlB D # 先按CTRLB 随后按D另外一个是,端口转发命令 ssh -p XXXX rootssh.intern-ai.org.cn -CNg -L …...

C++ | Leetcode C++题解之第350题两个数组的交集II
题目: 题解: class Solution { public:vector<int> intersect(vector<int>& nums1, vector<int>& nums2) {sort(nums1.begin(), nums1.end());sort(nums2.begin(), nums2.end());int length1 nums1.size(), length2 nums2…...

遗传算法原理与实战(python、matlab)
遗传算法 1.什么是遗传算法 遗传算法(Genetic Algorithm,简称GA)是一种基于生物进化论和遗传学原理的全局优化搜索算法。它通过模拟自然界中生物种群的遗传机制和进化过程来解决复杂问题,如函数优化、组合优化、机器学习等。遗传…...

《黑神话:悟空》媒体评分解禁 M站均分82
《黑神话:悟空》媒体评分现已解禁,截止发稿时,M站共有43家媒体评测,均分为82分。 部分媒体评测: God is a Geek 100: 毫无疑问,《黑神话:悟空》是今年最好的动作游戏之一ÿ…...

安卓中携程和线程的区别。携程是指什么?
在安卓和其他编程环境中,协程(Coroutine)和线程(Thread)是两种不同的并发处理机制。它们各自有独特的特点和适用场景: 线程(Thread): 线程是操作系统能够进行运算调度的最…...
遇到错误)
部署flannel网络(master服务器执行)遇到错误
出现错误 “The connection to the server 192.168.0.23:6443 was refused - did you specify the right host or port?” 的原因通常是因为 Kubernetes API 服务器未能启动或无法访问。以下是一些可能的原因和解决方案: 解决方案 确认 Kubernetes API 服务器的状…...
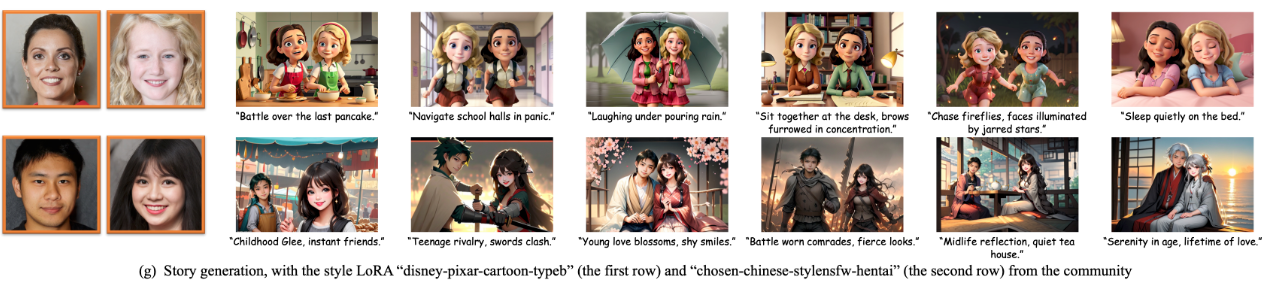
超越IP-Adapter!阿里提出UniPortrait,可通过文本定制生成高保真的单人或多人图像。
阿里提出UniPortrait,能根据用户提供的文本描述,快速生成既忠实于原图又能灵活调整的个性化人像,用户甚至可以通过简单的句子来描述多个不同的人物,而不需要一一指定每个人的位置。这种设计大大简化了用户的操作,提升了…...

使用托管竞价实例在Amazon SageMaker上运行机器学习训练
这是本系列文章的第二篇,旨在通过动手实践,帮助大家学习亚马逊云科技的生成式AI相关技能。通过这些文章,大家将掌握如何利用亚马逊云科技的各类服务来应用AI技术。 那么让我们开始今天的内容吧! 介绍 什么是Amazon SageMaker …...
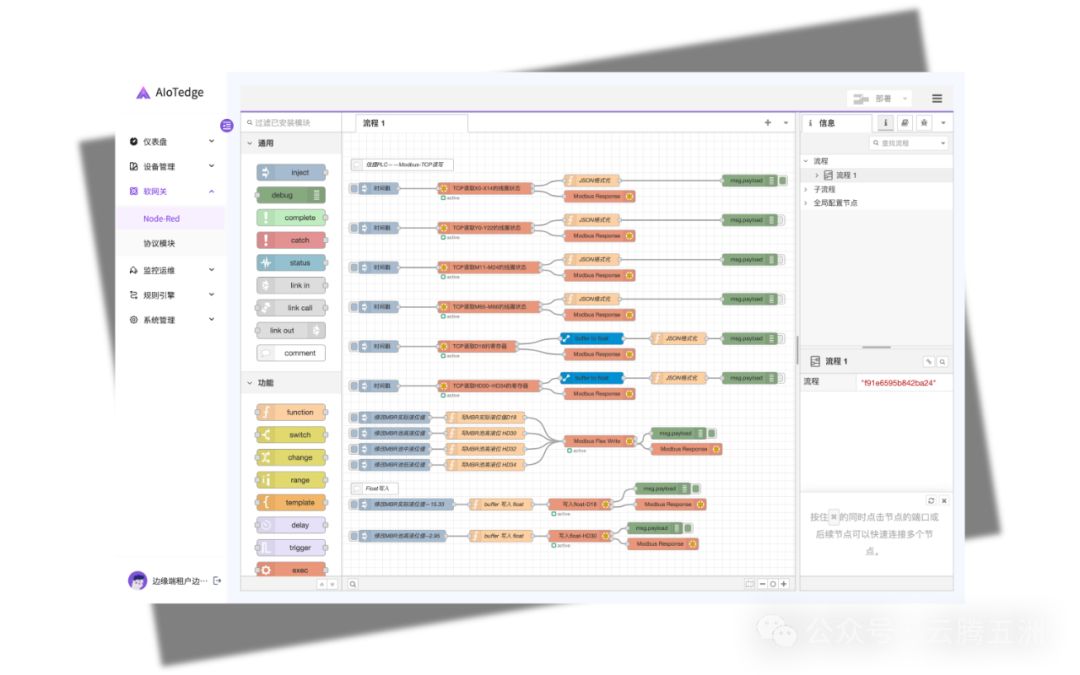
AIoT智能物联网平台定义
随着科技的飞速发展,我们正步入一个由智能设备和互联网络构成的新时代。AIoT,即人工智能物联网(Artificial Intelligence of Things),是这个时代的标志性产物。本文旨在探讨AIoT智能物联网平台的定义、核心组件、应用场…...

LLM推理流式响应延迟骤降73%:FastAPI 2.0 + asyncpg + Redis Stream 实战调优,附可复用中间件代码库
第一章:LLM推理流式响应延迟骤降73%:FastAPI 2.0 asyncpg Redis Stream 实战调优,附可复用中间件代码库在高并发LLM服务场景中,传统同步I/O与阻塞式数据库访问常导致首字节延迟(TTFB)飙升。我们通过重构请…...

WarcraftHelper:让魔兽争霸3重获新生的兼容性增强工具
WarcraftHelper:让魔兽争霸3重获新生的兼容性增强工具 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 你是否曾在现代电脑上尝试重温魔兽争…...

基于鲸鱼优化算法改进XGBoost在MATLAB中的时间序列预测性能(迭代次数、最大深度和学习...
基于鲸鱼优化算法优化XGBoost(WOA-XGBoost)的时间序列预测 WOA-XGBoost时间序列 采用交叉验证抑制过拟合问题 优化参数为迭代次数、最大深度和学习率 matlab代码,注:暂无Matlab版本要求 -- 推荐 2016B 版本及以上 注:采用 XGBoost 工具箱&…...
)
保姆级教程:YOLOv8轻量化模型从训练到安卓部署全流程(附避坑指南)
保姆级教程:YOLOv8轻量化模型从训练到安卓部署全流程(附避坑指南) 在移动端实现实时目标检测一直是计算机视觉领域的热门方向。YOLOv8作为当前最先进的检测模型之一,其轻量化版本在安卓设备上的部署需求日益增长。本文将手把手带…...

突破平台限制:WorkshopDL重构Steam创意工坊资源获取体验
突破平台限制:WorkshopDL重构Steam创意工坊资源获取体验 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL WorkshopDL作为一款仅10MB大小的开源工具,通过智…...

每日算法题 21---54.螺旋矩阵
题目54.螺旋矩阵要求给你一个 m 行 n 列的矩阵 matrix ,请按照 顺时针螺旋顺序 ,返回矩阵中的所有元素。示例思路核心思路是用边界圈定遍历范围,按照固定方向循环遍历,每遍历完一条边就收缩对应边界,直到边界交叉终止&…...

Lingbot-Depth-Pretrain-ViTL-14在互联网内容审核中的深度场景理解应用
Lingbot-Depth-Pretrain-ViTL-14在互联网内容审核中的深度场景理解应用 每天,互联网上都会产生数以亿计的图片和视频。对于平台的内容审核团队来说,这既是流量的盛宴,也是巨大的挑战。传统的审核方式,无论是依赖人工还是基于二维…...

PyTorch 2.8镜像部署教程:RTX 4090D配置htop实时监控GPU/CPU/内存使用
PyTorch 2.8镜像部署教程:RTX 4090D配置htop实时监控GPU/CPU/内存使用 1. 环境准备与快速部署 在开始之前,请确保您的硬件配置满足以下要求: 显卡:RTX 4090D 24GB显存内存:120GB及以上存储:系统盘50GB …...
)
SENet实战:如何在PyTorch中实现Squeeze-and-Excitation模块(附完整代码)
PyTorch实战:手把手实现SENet中的SE模块 在计算机视觉领域,注意力机制已经成为提升模型性能的重要工具。今天我们将深入探讨如何在PyTorch中实现Squeeze-and-Excitation(SE)模块——这个让ResNet-50在ImageNet上表现接近ResNet-10…...

Phi-4-mini-reasoning效果展示:同参数量级中推理准确率超Llama3-8B实测对比
Phi-4-mini-reasoning效果展示:同参数量级中推理准确率超Llama3-8B实测对比 1. 开篇亮点:小模型的大智慧 Phi-4-mini-reasoning这款仅有3.8B参数的轻量级开源模型,正在重新定义我们对小模型能力的认知。作为专为数学推理、逻辑推导和多步解…...