linux驱动入门实验班——平台总线设备驱动模型和设备树
目录
前言
一、重要结构体
二、编程思路
1.platform_driver结构体
2.probe
三、使用设备树
1.步进电机
2.红外遥控
四、代码示例
前言
在这里主要记录学习韦东山老师Linux驱动人入门实验班的笔记,韦东山老师的驱动课程讲的非常好,想要学习驱动的小伙伴可以去b站学习他的课程。
一、重要结构体
platfrom_driver结构体:
platform_driver 结构体是在 Linux 内核中定义的一个结构体,用于在驱动程序中注册和管理平台设备驱动。它包含以下字段:
struct device_driver driver:指向 struct device_driver 结构体的指针,表示该平台驱动程序所属的设备驱动。
const struct platform_device_id *id_table:一个指向 struct platform_device_id 结构体数组的指针,用于匹配与该平台驱动程序相匹配的设备。
int (*probe)(struct platform_device *pdev):一个函数指针,指向设备的探测函数,用于在设备被注册到系统后执行特定的操作。
int (*remove)(struct platform_device *pdev):一个函数指针,指向设备的移除函数,用于在设备被注销时执行特定的操作。
void (*shutdown)(struct platform_device *pdev):一个函数指针,指向设备的关机函数,用于在系统关机时执行特定的操作。
struct device_driver driver:用于表示该平台驱动程序的设备驱动。
struct list_head driver_entry:用于将平台驱动程序添加到全局驱动程序链表中的链表节点。
二、编程思路
在原来第一个模板的基础上
1.platform_driver结构体
还需要构造platform_driver结构体和of_device_id结构体
static struct platform_driver gpio_platfrom_drive = {.driver = {.name = "100ask_gpio_plat_drv",.of_match_table = gpio_dt_ids,},.probe = gpio_drv_probe,.remove = gpio_drv_remove,
};struct of_device_id { char name[32]; char type[32]; char compatible[128]; const void *data; };在Linux内核中,of_device_id结构体用于存储设备树绑定信息,用于设备与驱动程序之间的匹配。它包含以下字段:name:设备树绑定的名称。
type:设备树绑定的类型。
compatible:设备树绑定的兼容字符串,用于指定设备与驱动程序之间的兼容关系。
data:指向附加数据的指针,可以在设备树绑定中使用。gpio_drv_probe和gpio_drv_remove分别代替了原来init入口函数和exit出口函数的作用,而在原来的这两个函数中是注册和反注册platform_driver结构体。
使用的函数为:
platform_driver_register 是一个函数,用于注册平台设备驱动程序。它将驱动程序与平台设备进行绑定,使得驱动程序能够管理其对应的平台设备。函数原型为:int platform_driver_register(struct platform_driver *drv);参数说明:drv:指向平台驱动程序的指针,其类型为 struct platform_driver。平台驱动程序是一个结构体,包含了驱动程序的各种回调函数和其他属性。定义了平台设备和驱动程序之间的关联关系。
返回值:成功注册平台驱动程序时,返回 0;注册失败时,返回负数错误代码。
使用 platform_driver_register 函数可以将平台驱动程序注册到内核中,以便在加载平台设备时自动调用相应的驱动程序。注册平台驱动程序后,内核会通过设备树 (Device Tree) 或 ACPI (Advanced Configuration and Power Interface) 系统启动方法来查找并匹配平台设备,并自动加载和绑定对应的驱动程序。注册平台驱动程序时,需要确保驱动程序的结构体中的回调函数和其他属性正确设置,以便驱动程序能够正确地管理和操作平台设备。2.probe
static int gpio_drv_probe(struct platform_device *pdev)gpio_drv_probe中使用到的结构体:
struct device_node *np = pdev->dev.of_node;platform_device 结构体包含的重要成员包括:name:设备的名称,用于唯一标识设备。
id:设备的 ID,用于区分同一类型的不同设备。
num_resources:设备所需的资源数量。
resource:用于描述设备的资源信息,如内存范围、中断、I/O 端口等。
dev:指向设备所属的 struct device 结构体的指针,用于与设备的核心操作进行交互。
pdata:设备特定的数据,用于向设备驱动程序传递设备特定的信息。
driver_data:指向设备驱动程序特定数据的指针,用于与设备驱动程序交互。struct device_node {const char *name; // 设备节点名称const char *type; // 设备节点类型const char *fullname; // 设备节点完整路径名称struct device_node *parent; // 父设备节点struct device_node *child; // 子设备节点struct device_node *sibling; // 兄弟设备节点void *data; // 设备节点特定数据// 其他成员...
};struct resource {resource_size_t start; // 资源起始地址resource_size_t end; // 资源结束地址(包含)resource_size_t flags; // 资源标志const char *name; // 资源名称struct resource *parent; // 父资源struct resource *sibling; // 兄弟资源struct resource *child; // 子资源
};gpio_drv_probe中使用到的函数:
- of_gpio_count
of_gpio_count 是一个函数,用于获取设备的GPIO数量。它是在Device Tree中使用的,用于解析设备节点中定义的GPIO信息。函数原型为:int of_gpio_count(struct device_node *np);参数说明:struct device_node *np:指向设备节点的指针。
返回值:返回设备节点中定义的GPIO数量。如果没有定义GPIO,则返回0。
使用 of_gpio_count 函数可以确定设备节点中定义的GPIO数量,从而在设备驱动程序中进行相应的GPIO初始化和管理操作。- kmalloc
kmalloc 是一个内核函数,用于动态分配内核空间的连续内存块。它可以用于分配任意大小的内存区域。函数原型为:void *kmalloc(size_t size, gfp_t flags);参数说明:size:要分配的内存块的大小,以字节为单位。
flags:分配内存的标志,用于指定分配内存的行为。
返回值:返回指向分配的内存块的指针,如果分配失败,则返回NULL。- platform_get_resource
platform_get_resource 是一个函数,用于获取给定平台设备的资源信息。它可以用于获取平台设备上的寄存器地址、中断号、IO地址等资源的信息。函数原型为:struct resource *platform_get_resource(struct platform_device *dev, unsigned int type, unsigned int num);参数说明:dev:指向平台设备的指针。
type:要获取的资源类型,可以是 IORESOURCE_MEM、IORESOURCE_IO 或 IORESOURCE_IRQ。这些类型定义在 include/linux/ioport.h 和 include/linux/irq.h 头文件中。
num:要获取的资源号,资源号从 0 开始计数。
返回值:返回指向资源的 struct resource 结构体指针,如果获取失败,则返回 NULL。
使用 platform_get_resource 函数可以获取平台设备上的资源信息。例如,可以使用它来获取平台设备上的寄存器地址,以便进行寄存器访问。需要注意的是,资源的类型和编号需要事先了解,以便正确地调用 platform_get_resource 函数。三、使用设备树
1.步进电机
-
修改设备树:
arch/arm/boot/dts/100ask_imx6ull-14x14.dts
添加节点:
motor {compatible = "100ask,gpiodemo";gpios = <&gpio4 19 GPIO_ACTIVE_HIGH>, <&gpio4 20 GPIO_ACTIVE_HIGH>,<&gpio4 21 GPIO_ACTIVE_HIGH>,<&gpio4 22 GPIO_ACTIVE_HIGH>;
};-
编译:make dtbs
-
复制到单板上
ubuntu:
cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb ~/nfs_rootfs/开发板:
mount -t nfs -o nolock,vers=3 192.168.5.11:/home/book/nfs_rootfs /mnt cp /mnt/100ask_imx6ull-14x14.dtb /boot reboot -
测试
insmod gpio_drv.ko ./button_test /dev/motor ...2.红外遥控
-
修改设备树:
arch/arm/boot/dts/100ask_imx6ull-14x14.dts
添加节点:
irda {compatible = "100ask,gpiodemo";gpios = <&gpio4 19 GPIO_ACTIVE_HIGH>;
};-
编译:make dtbs
-
复制到单板上
PC: cp arch/arm/boot/dts/100ask_imx6ull-14x14.dtb ~/nfs_rootfs/ 开发板: mount -t nfs -o nolock,vers=3 192.168.5.11:/home/book/nfs_rootfs /mnt cp /mnt/100ask_imx6ull-14x14.dtb /boot reboot -
测试
insmod gpio_drv.ko ./button_test /dev/irda
四、代码示例
static int irda_drv_probe(struct platform_device *pdev)
{int err = 0;int i;struct device_node *np = pdev->dev.of_node;struct resource *res;if (np){count = of_gpio_count(np);if (!count){return -EINVAL;}gpios = kmalloc(count * sizeof(struct gpio_desc), GFP_KERNEL);for (i = 0; i < count; i++){gpios[i].gpio = of_get_gpio(np, i);sprintf(gpios[i].name, "%s_pin_%d", np->name, i);}}else{count = 0;while (1){res = platform_get_resource(pdev, IORESOURCE_IRQ, count);if (res){count++;}else{break;}}if(!count){return -EINVAL;}gpios = kmalloc(count * sizeof(struct gpio_desc), GFP_KERNEL);for (i = 0; i < count; i++){res = platform_get_resource(pdev, IORESOURCE_IRQ, count);gpios[i].gpio = res->start;sprintf(gpios[i].name, "%s_pin_%d", pdev->name, i);}}for (i = 0; i < count; i++){gpios[i].irq = gpio_to_irq(gpios[i].gpio);setup_timer(&gpios[i].irda_timer, irda_timer_expire, (unsigned long)&gpios[i]);err = request_irq(gpios[i].irq, irda_irq_handler, IRQF_TRIGGER_FALLING | IRQF_TRIGGER_RISING, gpios[i].name, &gpios[i]);}major = register_chrdev(0, "irda_drv", &irda_drv);irda_class = class_create(THIS_MODULE, "irda_class");device_create(irda_class, NULL, MKDEV(major, 0), NULL, "irda_drv");return err;
}static int irda_drv_remove(struct platform_device *pdev)
{int i;device_destroy(irda_class, MKDEV(major, 0));class_destroy(irda_class);unregister_chrdev(major, "irda_drv");for (i= 0; i < count; i++){free_irq(gpios[i].irq, &gpios[i]);del_timer(&gpios[i].irda_timer);}return 0;
}static struct of_device_id irda_dt_ids[] = {{.compatible = "irda,demo",},
};static struct platform_driver irda_platform_driver = {.driver = {.name = "irda_plat_drive",.of_match_table = irda_dt_ids,},.probe = irda_drv_probe,.remove = irda_drv_remove,
};
相关文章:

linux驱动入门实验班——平台总线设备驱动模型和设备树
目录 前言 一、重要结构体 二、编程思路 1.platform_driver结构体 2.probe 三、使用设备树 1.步进电机 2.红外遥控 四、代码示例 前言 在这里主要记录学习韦东山老师Linux驱动人入门实验班的笔记,韦东山老师的驱动课程讲的非常好,想要学习驱动…...

零基础学习Python(六)
1. 元类的应用 使用元类给对象添加一个固有属性author: 对类名进行限定,要求类名必须是大写字母开头: class MetaC(type):def __init__(cls, name, bases, attrs):if not name.istitle():raise TypeError("类名必须是大写字母开头~")return …...

微信小程序--31(todolist案例)
一.功能 输入待办事件添加代办事件删除代办事件 二、步骤 1.添加输入框 .wxml代码: <!-- 1.输入框 --><input type"text" bindinput"handleInput" value"{{text}}" /> .wxss代码: /* 1.输入框样式 */ i…...

springboot项目使用本地依赖项,打包后出现NoClassDefFoundError的一种解决方法
可以把本地依赖项上传到本地仓库后再引用 建立 Maven 本地仓库并将依赖上传到本地仓库 要建立 Maven 本地仓库并将依赖上传到本地仓库,可以按照以下步骤进行操作: 1. 配置 Maven 本地仓库路径 Maven 默认会在用户的主目录下的 .m2/repository 目录创…...

Maven高级使用指南
在开发大型项目时,Maven作为一个强大的构建和项目管理工具,能显著提升项目管理和构建的效率。然而,随着项目的扩大,维护和管理的复杂性也随之增加。本文将探讨一些高级的Maven用法和解决方案,以帮助你更好地管理大型项…...

windows docker 执行apt-get 权限问题
今天在windows下安装的docker 部署的容器执行apt-get遇到权限问题 PS C:\Users\xiaok> docker exec -it jenkins sh $ apt-get update Reading package lists... Done E: Could not open lock file /var/lib/apt/lists/lock - open (13: Permission denied) E: Unable to l…...

Linux系统信息排查
目录 介绍步骤 介绍 1、熟悉查看CPU信息、操作系统信息、用户信息、特殊权限账户、启动项和任务计划的排查命令 2、在进行受害主机排查时,首先要对主机系统进行基本排查,方便对受害主机有一个初步的了解。 3、利用lscpu和uname -a查看系统硬件软件基本…...

《图解设计模式》笔记(四)分开考虑
九、Bridge模式:将类的功能层次结构与实现层次结构分离 类的两个层次结构和作用 类的功能层次结构:希望增加新功能时 父类有基本功能,在子类中增加新功能 Something父类 …├─SomethingGood子类 想要再增加新功能 Something父类 …├─So…...

Linux shell编程学习笔记74:sed命令——沧海横流任我行(中)
0 前言 自 60 年代末以来,sed 一直是 Unix 标准工具箱的一部分。 Sed在以下三种情况下特别有用: 编辑太大的文件,无法进行舒适的交互式编辑; 当编辑命令序列过于复杂而无法在交互模式下轻松键入时,可以编辑任何大小的…...

[数据集][目标检测]道路积水检测数据集VOC+YOLO格式2699张1类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):2699 标注数量(xml文件个数):2699 标注数量(txt文件个数):2699 标注…...

不同路径
不同路径 思路: 法一:动态规划 const int N 110; class Solution { int dp[N][N];//dp[i][j]:从起点走到 i j的路径个数。 public:int uniquePaths(int m, int n) {for(int i1;i<n;i){dp[1][i]1;} for(int i1;i<m;i) dp[i][1]1;f…...

【HTML】HTML学习之引入CSS样式表
1、CSS样式规则 选择器{属性1:属性值1; 属性2:属性值2; 属性3:属性值3;}2、HTML引入CSS样式表 2.1、行内式 行内式也称为内联样式,是通过标签的style属性来设置元素的样式,其基本语法格式如下: <标签名 style"属性1:属性值1; 属性2:属性值2;…...

shaushaushau1
CVE-2023-7130 靶标介绍: College Notes Gallery 2.0 允许通过“/notes/login.php”中的参数‘user’进行 SQL 注入。利用这个问题可能会使攻击者有机会破坏应用程序,访问或修改数据. 已经告诉你在哪里存在sql注入了,一般上来应该先目录扫…...

揭秘面试必备:高频算法与面试题全面解析
干货分享,感谢您的阅读! (暂存篇---后续会删除,完整版和持续更新见高频面试题基本总结回顾(含笔试高频算法整理)) 备注:引用请标注出处,同时存在的问题请在相关博客留言…...

设计模式-visit模式-在语法树的实践
文章目录 背景示例代码分析灵活性双重分派 总结 背景 很多项目代码有accept()用法,在calcite 里也看到了这种,深入了解一下 语法树遍历:编译器通常会将源代码解析成抽象语法树(AST)。为了实现不同的编译阶段ÿ…...

ZK-Rollups测评
1. 引言 Matter Labs团队和多个高校研究人员一起,发布2024年论文《Analyzing and Benchmarking ZK-Rollups》,开源代码见: https://github.com/StefanosChaliasos/zkrollup-benchmarking(Python) 其中: …...
:并行流+二级缓存)
redis生产使用场景(一):并行流+二级缓存
本文主要介绍 redis 缓存在线上的使用场景 由于业务的特殊性,在生产库用户表中,大概有 50 多万的测试用户,在真实业务计算中,要把测试用户给筛选掉,所以在计算前,需要把测试用户加载到 redis 缓存中&#x…...

EXCEL跨文件查询,指定条件列,返回满足条件的指定列
EXCEL跨文件查询,指定条件列,返回满足条件的指定列 Private Sub cmd_find_from_workbooks_Click() Dim S_Cols As String, thePath As String, Sor_Col As Integer, sz_Cols As Variant S_Cols T_jieguo_cols.Text sz_Cols Split(S_Cols, ",&quo…...

[数据集][目标检测]流水线物件检测数据集VOC+YOLO格式9255张26类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件) 图片数量(jpg文件个数):9255 标注数量(xml文件个数):9255 标注数量(txt文件个数):9255 标注…...
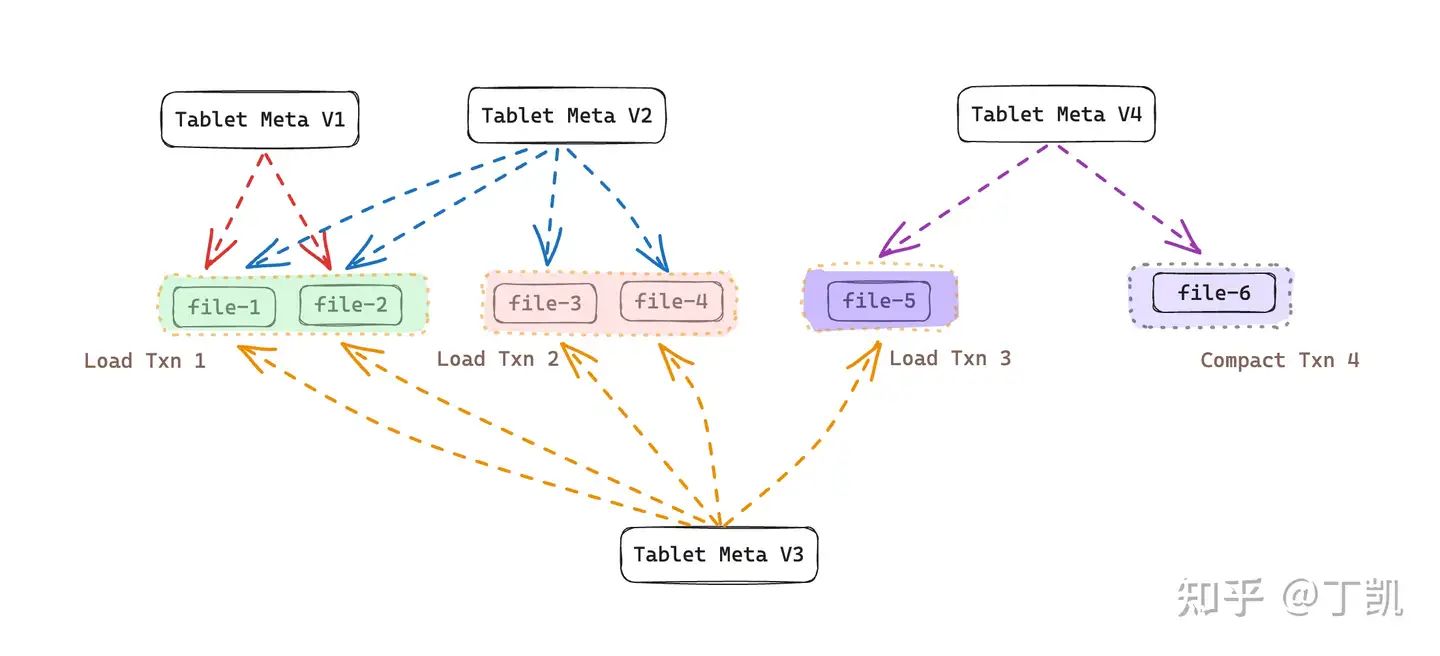
StarRocks 存算分离 Compaction 原理
前言 StarRocks 中每次数据摄入都会生成一个新的数据版本,而查询时需要将所有版本数据进行合并才能获得一个正确的结果,如果历史数据版本太多,那么查询时需要读取的文件数也会很多,造成查询效率低下。因而 StarRocks 存在内部任务…...

贾子竞争哲学与新范式升维战略——从 “多维对抗“ 到 “意义消解“ 的终极战略蓝图
贾子竞争哲学与新范式升维战略——从 "多维对抗" 到 "意义消解" 的终极战略蓝图摘要本战略体系彻底颠覆了以价格、功能、渠道为核心的传统红海对抗逻辑,提出了一套基于 "维度升维、悖论锁定、意义消解、时间收割" 的全新竞争哲学。其…...

基于MicroPython的嵌入式射击计时器开发实战:从状态机到人机交互
1. 项目概述:一个嵌入式射击计时器的诞生在竞技射击、速射训练或者日常的射击练习中,一个精准、可靠且响应迅速的计时器是评估表现的核心工具。市面上的专业计时器往往价格不菲,且功能固定,难以根据个人训练习惯进行深度定制。作为…...

实战-Spine动画与UI元素的层级穿插艺术
1. Spine动画与UI层级穿插的核心挑战 在2D游戏开发中,角色动画和UI元素的视觉层级管理是个高频痛点。我遇到过最典型的场景是:当角色装备武器时,武器需要插入到手臂和身体之间;释放技能时,特效又要在特定骨骼层级间动态…...

NotebookLM技能集成:自动化文档问答与RAG应用实践
1. 项目概述:当NotebookLM遇上自定义技能最近在折腾AI工具链的时候,发现了一个挺有意思的项目:jasontsaicc/notebooklm-studio-skill。乍一看这个名字,你可能和我最初的反应一样,有点摸不着头脑。NotebookLM我知道&…...

DevChat:无缝集成IDE的开源AI编程助手,提升开发效率
1. 项目概述:一个真正融入工作流的AI编程伙伴如果你和我一样,每天大部分时间都花在代码编辑器里,那你肯定也经历过这样的场景:想重构一段代码,却卡在命名上;写一个复杂的函数,需要反复查阅文档&…...

Steam Deck Windows控制器驱动深度配置指南
Steam Deck Windows控制器驱动深度配置指南 【免费下载链接】steam-deck-windows-usermode-driver A windows usermode controller driver for the steam deck internal controller. 项目地址: https://gitcode.com/gh_mirrors/st/steam-deck-windows-usermode-driver 想…...

车载以太网之要火系列 - 第43篇:郭大侠学SOME/IP :服务写死痛点多,SD出山更灵活
写在开篇蓉儿挖新坑上回说到,郭靖搞清楚了SOME/IP的报文头、Service ID、Instance ID、Method、Event、Field……学了一大堆。郭靖合上笔记本,信心满满:“蓉儿,SOME/IP我算是学完了!车窗服务用0x0300,左前窗…...

河南AI设计课程指南:机构推荐与避坑秘籍
一、AI 设计热潮下的河南求学路在数字化时代的浪潮中,AI 设计正以前所未有的速度席卷各个行业,成为了创新与效率的新代名词。从广告设计、影视制作到电商运营、交互设计,AI 设计不仅能够大幅提升设计效率,还能通过数据分析和算法模…...

如何快速掌握Java-Callgraph2:静态调用图分析的完整指南
如何快速掌握Java-Callgraph2:静态调用图分析的完整指南 【免费下载链接】java-callgraph2 Programs for producing static call graphs for Java programs. 项目地址: https://gitcode.com/gh_mirrors/ja/java-callgraph2 你是否曾经在复杂的Java项目中迷失…...

openclaw-route-check:多协议路由诊断工具的原理、安装与实战应用
1. 项目概述与核心价值最近在折腾一些需要跨地域、跨网络环境访问的服务时,路由问题总是最让人头疼的环节。你可能也遇到过类似情况:明明服务部署在A地,从B地访问时延迟高得离谱,或者干脆时通时不通,排查起来像大海捞针…...