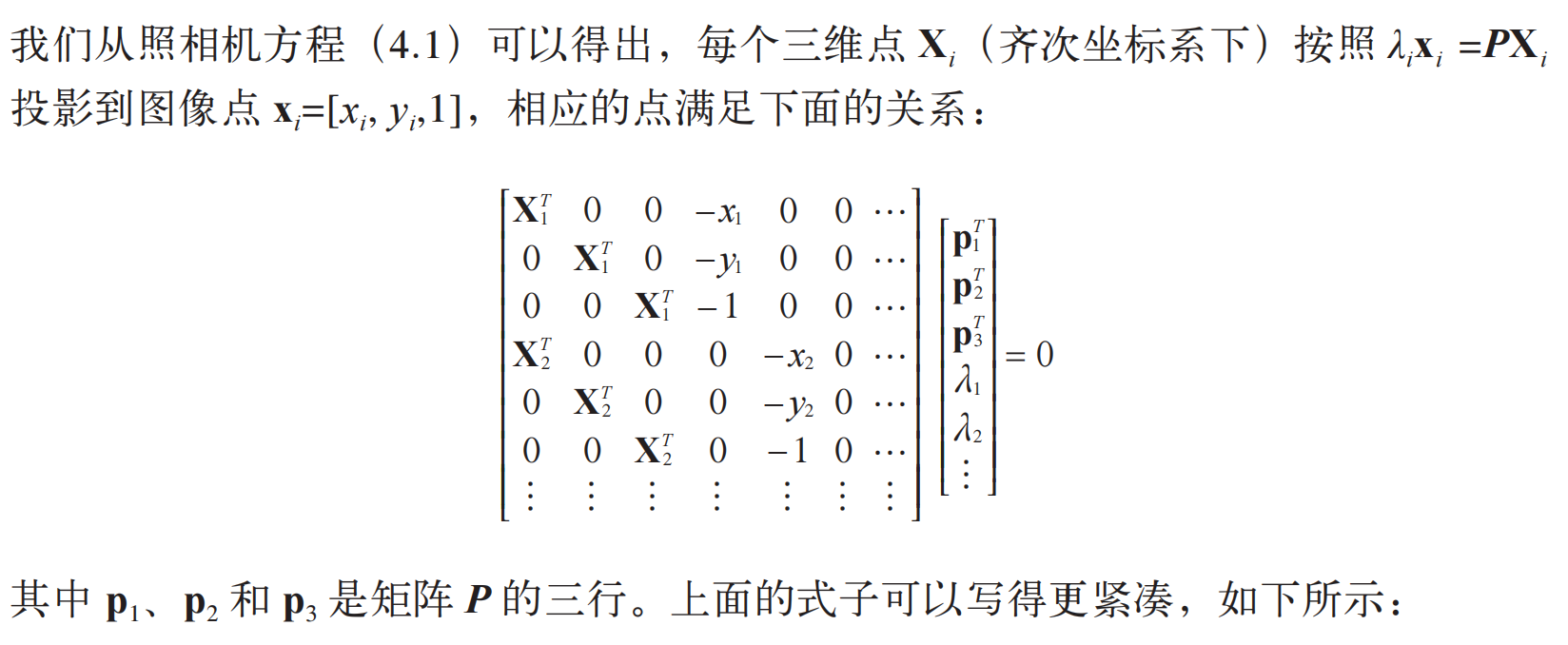
第 5 章多视图几何
本章讲解如何处理多个视图,以及如何利用多个视图的几何关系来恢复照相机位置信息和三维结构。通过在不同视点拍摄的图像,我们可以利用特征匹配来计算出三维场景点以及照相机位置。本章会介绍一些基本的方法,展示一个三维重建的完整例子;本章最后将介绍如何由立体图像进行致密深度重建。
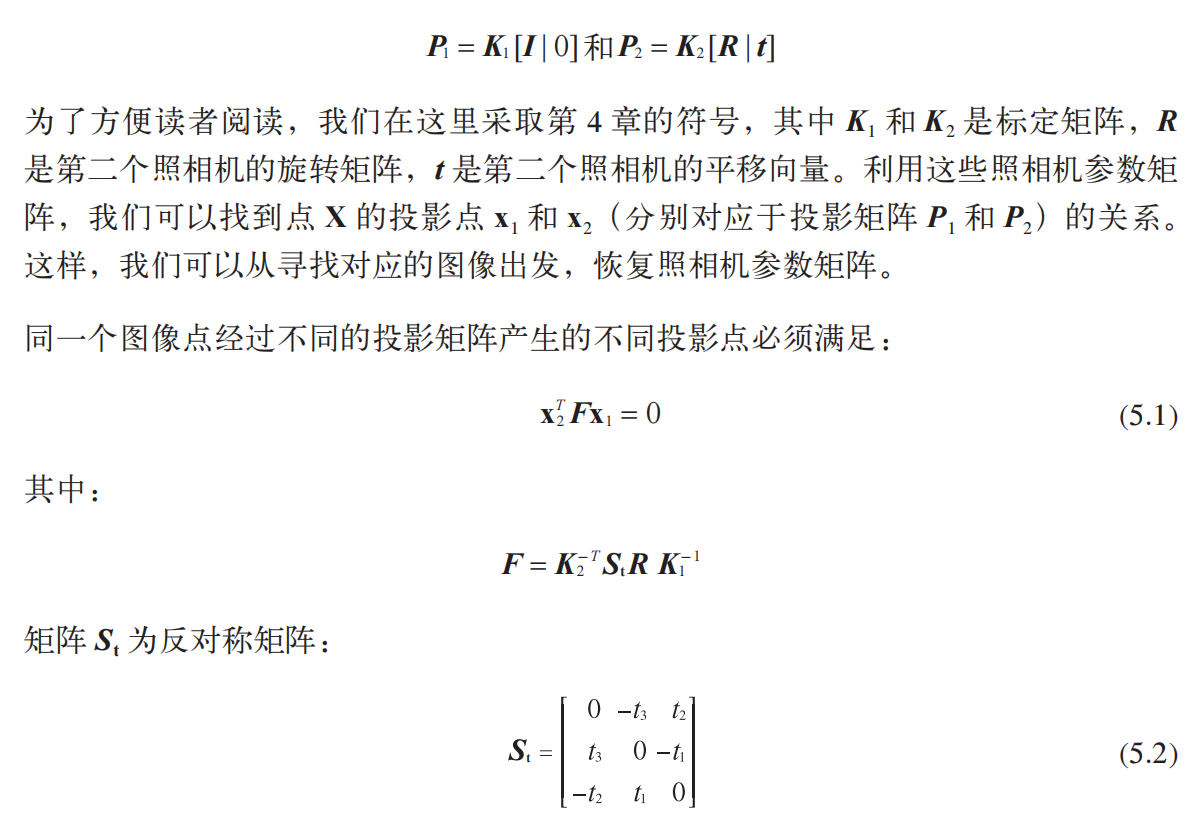
5.1 外极几何
多视图几何是利用在不同视点所拍摄图像间的关系,来研究照相机之间或者特征之间关系的一门科学。图像的特征通常是兴趣点,本章使用的也是兴趣点特征。多视图几何中最重要的内容是双视图几何。如果有一个场景的两个视图以及视图中的对应图像点,那么根据照相机间的空间相对位置关系、照相机的性质以及三维场景点的位置,可以得到对这些图像点的一些几何关系约束。我们通过外极几何来描述这些几何关系。本节简要介绍外极几何的基本内容。关于外极几何的更多内容,参阅文献 。

因此,当我们分析双视图几何关系时,总是可以将照相机间的相对位置关系用单应
性矩阵加以简化。这里的单应性矩阵通常只做刚体变换,即只通过单应矩阵变换了
坐标系。一个比较好的做法是,将原点和坐标轴与第一个照相机对齐,则:

5.1.1 一个简单的数据集
在接下来的几节中,我们需要一个带有图像点、三维点和照相机参数矩阵的数据集。我们这里使用一个牛津多视图数据集;从 http://www.robots.ox.ac.uk/~vgg/data/datamview.html 可以下载 Merton1 数据的压缩文件。下面的脚本可以加载 Merton1 的数据
import camera
# 载入一些图像
im1 = array(Image.open('images/001.jpg'))
im2 = array(Image.open('images/002.jpg'))
# 载入每个视图的二维点到列表中
points2D = [loadtxt('2D/00'+str(i+1)+'.corners').T for i in range(3)]
# 载入三维点
points3D = loadtxt('3D/p3d').T
# 载入对应
corr = genfromtxt('2D/nview-corners',dtype='int',missing='*')
# 载入照相机矩阵到 Camera 对象列表中
P = [camera.Camera(loadtxt('2D/00'+str(i+1)+'.P')) for i in range(3)]
上面的程序会加载前两个图像(共三个)、三个视图中的所有图像特征点 1 、对应不同视图图像点重建后的三维点以及照相机参数矩阵(使用上一章的 Camera 类)。这里我们使用 loadtxt() 函数读取文本文件到 NumPy 数组中。因为并不是所有的点都可见,或都能够成功匹配到所有的视图,所以对应数据里包含了缺失的数据。加载对应数据时需要考虑这一点。genfromtxt() 函数通过将缺失的数值(在文件中用 * 表示)填充为 -1 来解决这个问题。将上面的代码保存到一个文件,例如 load_vggdata.py,然后使用命令 execfile() 可以很方便地运行上面的脚本,从而获取所有的数据:
execfile('load_vggdata.py')
下面来可视化这些数据。将三维的点投影到一个视图,然后和观测到的图像点比较:
# 将三维点转换成齐次坐标表示,并投影
X = vstack( (points3D,ones(points3D.shape[1])) )
x = P[0].project(X)
# 在视图 1 中绘制点
figure()
imshow(im1)
plot(points2D[0][0],points2D[0][1],'*')
axis('off')
figure()
imshow(im1)
plot(x[0],x[1],'r.')
axis('off')
show()
上面的代码绘制出第一个视图以及该视图中的图像点。为比较方便,投影后的点绘制在另一张图上,如图 5-2 所示。如果仔细观察,你会发现第二幅图比第一幅图多一些点。这些多出的点是从视图 2 和视图 3 重建出来的,而不在视图 1 中。

图 5-2:牛津 multi-view 数据集中的 Merton1 数据集:视图 1 与图像点(左);视图 1 与投影的三维点(右)
5.1.2 用Matplotlib绘制三维数据
为了可视化三维重建结果,我们需要绘制出三维图像。Matplotlib 中的 mplot3d 工具包可以方便地绘制出三维点、线、等轮廓线、表面以及其他基本图形组件,还可以通过图像窗口控件实现三维旋转和缩放。
可以通过在 axes 对象中加上 projection="3d" 关键字实现三维绘图,如下:
from mpl_toolkits.mplot3d import axes3d
fig = figure()
ax = fig.gca(projection="3d")
# 生成三维样本点
X,Y,Z = axes3d.get_test_data(0.25)
# 在三维中绘制点
ax.plot(X.flatten(),Y.flatten(),Z.flatten(),'o')
show()
get_test_data() 函数在 x, y 空间按照设定的空间间隔参数来产生均匀的采样点。压平这些网格,会产生三列数据点,然后我们可以将其输入 plot() 函数。这样,我们就可以在立体表面上画出三维点。
现在通过画出 Merton 样本数据来观察三维点的效果:
# 绘制三维点
from mpl_toolkits.mplot3d import axes3d
fig = figure()
ax = fig.gca(projection='3d')
ax.plot(points3D[0],points3D[1],points3D[2],'k.')
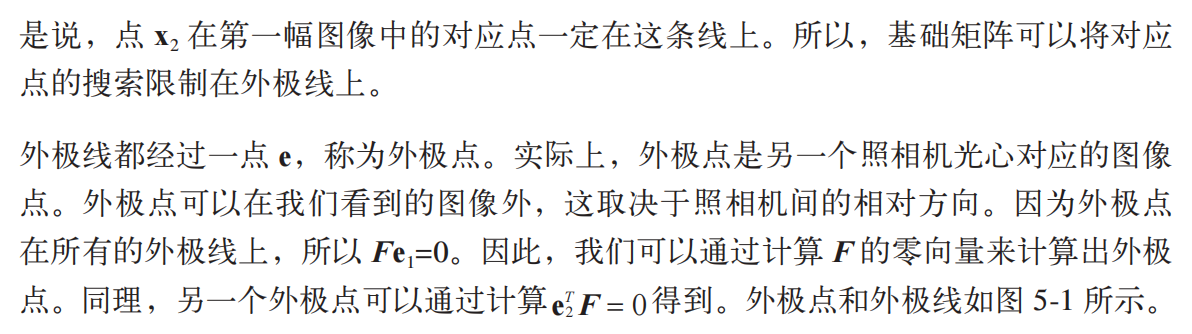
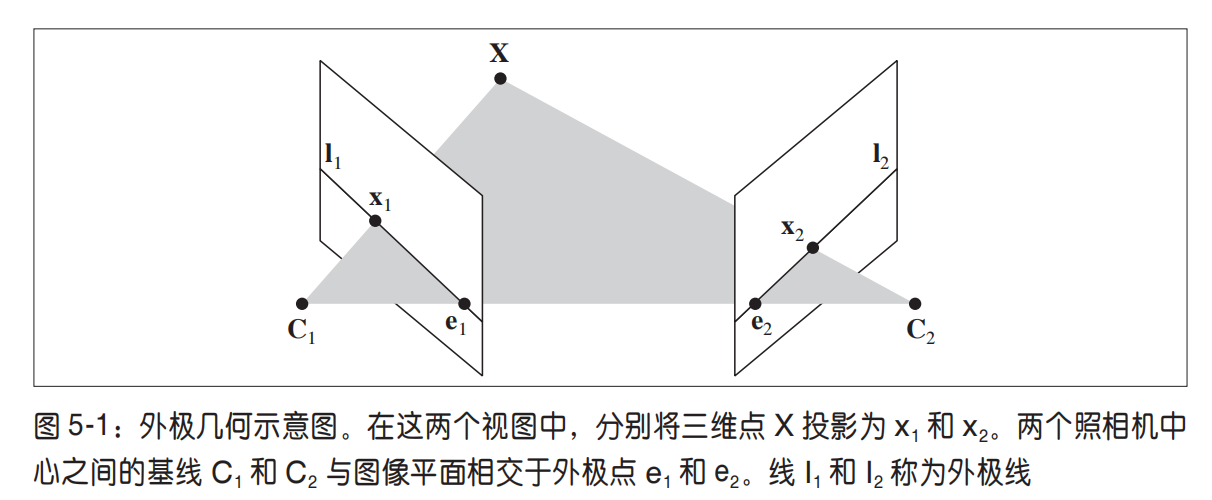
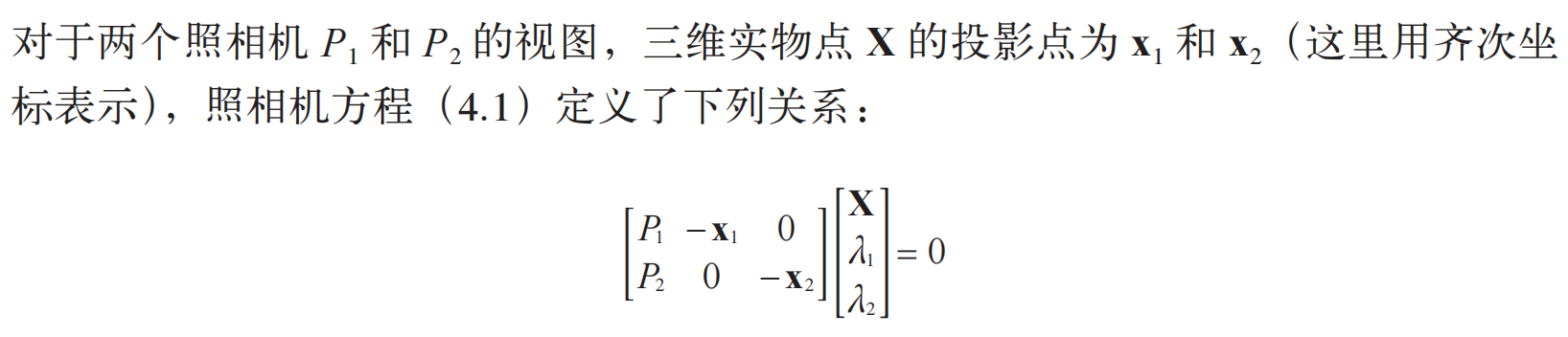
图 5-3 是三个不同视图中的三维图像点。图像窗口和控制界面外观效果像加上三维旋转工具的标准画图窗口。
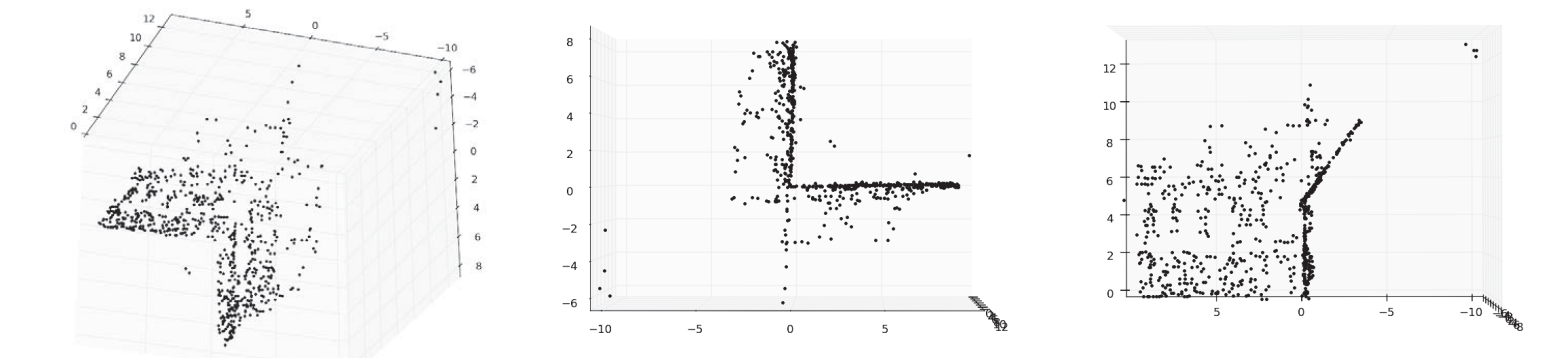
图5-3:使用 Matplottib 工具包绘制的,牛津 multi-view 数据库中 Mertoln1 数据集的三维点:从上面和侧边观测的视图(左);俯视的视图,展示了建筑墙体和屋顶上的点(中);侧视图,展示了一面墙的轮廓,以及另一面墙上点的主视图(右)
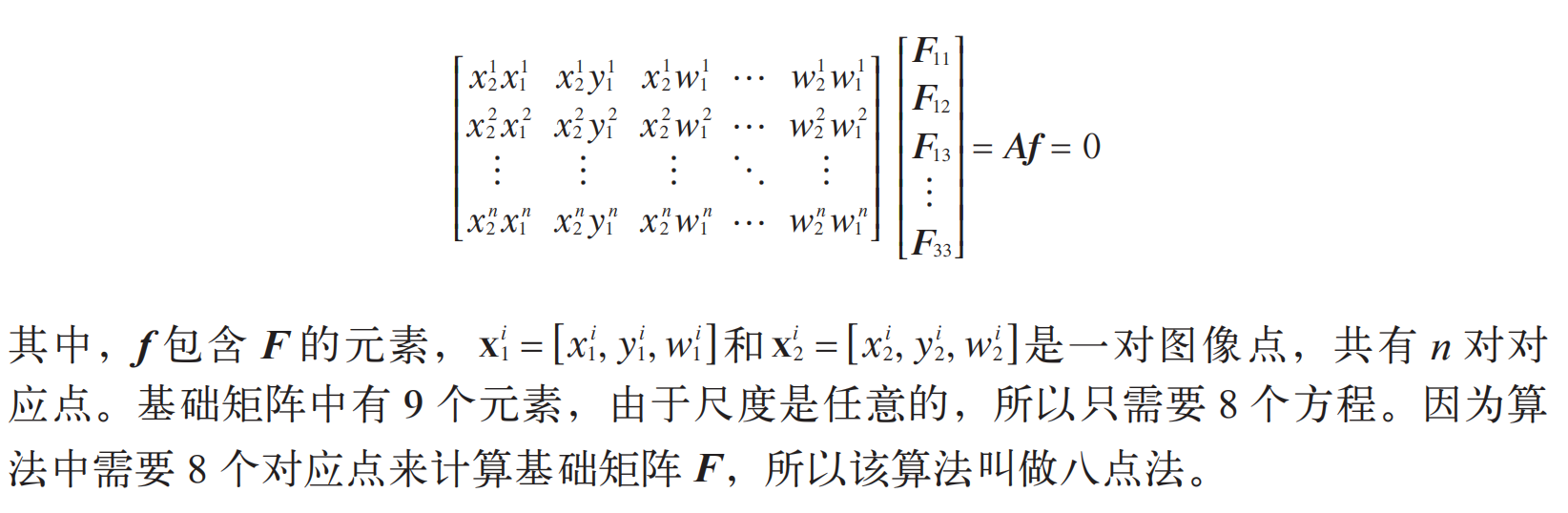
5.1.3 计算F:八点法
八点法是通过对应点来计算基础矩阵的算法。下面给出概述,更多内容参阅文献
外极约束(5.1)可以写成线性系统的形式:
新建一个文件 sfm.py,写入下面八点法中最小化 Af 的函数:
def compute_fundamental(x1,x2):
""" 使用归一化的八点算法,从对应点(x1,x2 3×n 的数组)中计算基础矩阵
每行由如下构成:
[x'*x,x'*y' x', y'*x, y'*y, y', x, y, 1]"""
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建方程对应的矩阵
A = zeros((n,9))
for i in range(n):
A[i] = [x1[0,i]*x2[0,i], x1[0,i]*x2[1,i], x1[0,i]*x2[2,i],
x1[1,i]*x2[0,i], x1[1,i]*x2[1,i], x1[1,i]*x2[2,i],
x1[2,i]*x2[0,i], x1[2,i]*x2[1,i], x1[2,i]*x2[2,i] ]
# 计算线性最小二乘解
U,S,V = linalg.svd(A)
F = V[-1].reshape(3,3)
# 受限 F
# 通过将最后一个奇异值置 0,使秩为 2
U,S,V = linalg.svd(F)
S[2] = 0
F = dot(U,dot(diag(S),V))
return F
我们通常用 SVD 算法来计算最小二乘解。由于上面算法得出的解可能秩不为 2(基础矩阵的秩小于等于 2),所以我们通过将最后一个奇异值置 0 来得到秩最接近 2 的基础矩阵。这是个很有用的技巧。上面的函数忽略了一个重要的步骤:对图像坐标进行归一化,这可能会带来数值问题。我们会在后面加以解决。
5.1.4 外极点和外极线
本节开始提到过,外极点满足 Fe1=0,因此可以通过计算 F 的零空间来得到。把下面的函数添加到 sfm.py 中:
def compute_epipole(F):
""" 从基础矩阵 F 中计算右极点(可以使用 F.T 获得左极点)"""
# 返回 F 的零空间(Fx=0)
U,S,V = linalg.svd(F)
e = V[-1]
return e/e[2]
如果想获得另一幅图像的外极点(对应左零空间的外极点),只需将 F 转置后输入上述函数即可。
我们可以在之前样本数据集的前两个视图上运行这两个函数:
import sfm
# 在前两个视图中点的索引
ndx = (corr[:,0]>=0) & (corr[:,1]>=0)
# 获得坐标,并将其用齐次坐标表示
x1 = points2D[0][:,corr[ndx,0]]
x1 = vstack( (x1,ones(x1.shape[1])) )
x2 = points2D[1][:,corr[ndx,1]]
x2 = vstack( (x2,ones(x2.shape[1])) )
# 计算 F
F = sfm.compute_fundamental(x1,x2)
# 计算极点
e = sfm.compute_epipole(F)
# 绘制图像
figure()
imshow(im1)
# 分别绘制每条线,这样会绘制出很漂亮的颜色
for i in range(5):
sfm.plot_epipolar_line(im1,F,x2[:,i],e,False)
axis('off')
figure()
imshow(im2)
# 分别绘制每个点,这样会绘制出和线同样的颜色
for i in range(5):
plot(x2[0,i],x2[1,i],'o')
axis('off')
show()
首先,选择两幅图像的对应点,然后将它们转换为齐次坐标。这里的对应点是从一个文本文件中读取得到的 ; 而实际上,我们可以按照第 2 章的方法提取图像特征,然后通过匹配来找到它们。由于缺失的数据在对应列表 corr 中为 -1,所以程序中有可能选取这些点。因此,上面的程序通过数组操作符 & 只选取了索引大于等于 0 的点。最后,我们在第一个视图中画出了前 5 个外极线,在第二个视图中画出了对应匹配点。这里我们主要借助 plot() 函数:
def plot_epipolar_line(im,F,x,epipole=None,show_epipole=True):
""" 在图像中,绘制外极点和外极线 F×x=0。F 是基础矩阵,x 是另一幅图像中的点 """
m,n = im.shape[:2]
line = dot(F,x)
# 外极线参数和值
t = linspace(0,n,100)
lt = array([(line[2]+line[0]*tt)/(-line[1]) for tt in t])
# 仅仅处理位于图像内部的点和线
ndx = (lt>=0) & (lt<m)
plot(t[ndx],lt[ndx],linewidth=2)
if show_epipole:
if epipole is None:
epipole = compute_epipole(F)
plot(epipole[0]/epipole[2],epipole[1]/epipole[2],'r*')
上面的函数将 x 轴的范围作为直线的参数,因此直线超出图像边界的部分会被截断。如果 show_epipole 为真,外极点也会被画出来(如果输入参数中没有外极点,外极点会在程序中计算获得)。程序结果如图 5-4 所示。在两幅图中,用不同的颜色将点和相应的外极线对应起来。
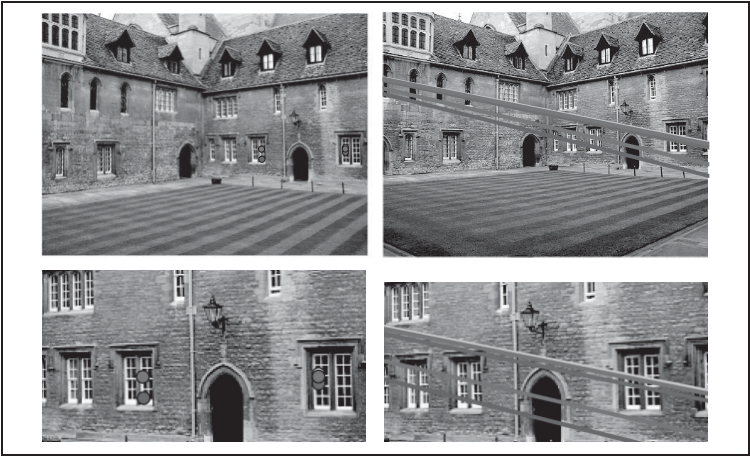
5-4:视图 1 中的外极线示为 Merton1 数据视图 2 中 5 个点对应的外极线。下面一行为这些点附近的特写。可以看到,这些线在图像外左侧位置将相交于一点。这些线表明点之间的对应可以在另外一幅图像中找到(线和点之间的颜色编码匹配)
5.2 照相机和三维结构的计算
上一节讲述了视图和基础矩阵、外极线计算方法的关系。这一节我们将简单地介绍计算照相机参数和三维结构的工具。
5.2.1 三角剖分
给定照相机参数模型,图像点可以通过三角剖分来恢复出这些点的三维位置。基本的算法思想如下。
由于图像噪声、照相机参数误差和其他系统误差,上面的方程可能没有精确解。我们可以通过 SVD 算法来得到三维点的最小二乘估值。
下面的函数用于计算一个点对的最小二乘三角剖分,把它添加到 sfm.py 中:
def triangulate_point(x1,x2,P1,P2):
""" 使用最小二乘解,绘制点对的三角剖分 """
M = zeros((6,6))
M[:3,:4] = P1
M[3:,:4] = P2
M[:3,4] = -x1
M[3:,5] = -x2
U,S,V = linalg.svd(M)
X = V[-1,:4]
return X / X[3]
最后一个特征向量的前 4 个值就是齐次坐标系下的对应三维坐标。我们可以增加下面的函数来实现多个点的三角剖分:
def triangulate(x1,x2,P1,P2):
""" x1 和 x2(3×n 的齐次坐标表示)中点的二视图三角剖分 """
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
X = [ triangulate_point(x1[:,i],x2[:,i],P1,P2) for i in range(n)]
return array(X).T
这个函数的输入是两个图像点数组,输出为一个三维坐标数组。
我们可以利用下面的代码来实现 Merton1 数据集上的三角剖分:
import sfm
# 前两个视图中点的索引
ndx = (corr[:,0]>=0) & (corr[:,1]>=0)
# 获取坐标,并用齐次坐标表示
x1 = points2D[0][:,corr[ndx,0]]
x1 = vstack( (x1,ones(x1.shape[1])) )
x2 = points2D[1][:,corr[ndx,1]]
x2 = vstack( (x2,ones(x2.shape[1])) )
Xtrue = points3D[:,ndx]
Xtrue = vstack( (Xtrue,ones(Xtrue.shape[1])) )
# 检查前三个点
Xest = sfm.triangulate(x1,x2,P[0].P,P[1].P)
print Xest[:,:3]
print Xtrue[:,:3]
# 绘制图像
from mpl_toolkits.mplot3d import axes3d
fig = figure()
ax = fig.gca(projection='3d')
ax.plot(Xest[0],Xest[1],Xest[2],'ko')
ax.plot(Xtrue[0],Xtrue[1],Xtrue[2],'r.')
axis('equal')
show()
上面的代码首先利用前两个视图的信息来对图像点进行三角剖分,然后把前三个图像点的齐次坐标输出到控制台,最后绘制出恢复的最接近三维图像点。输出到控制台的信息如下:
[[ 1.03743725 1.56125273 1.40720017]
[-0.57574987 -0.55504127 -0.46523952]
[ 3.44173797 3.44249282 7.53176488]
[ 1. 1. 1. ]]
[[ 1.0378863 1.5606923 1.4071907 ]
[-0.54627892 -0.5211711 -0.46371818]
[ 3.4601538 3.4636809 7.5323397 ]
[ 1. 1. 1. ]]
算法估计出的三维图像点和实际图像点很接近。如图 5-5 所示,估计点和实际点可以很好地匹配。
图 5-5:使用照相机矩阵和点的对应关系来三角剖分这些数据点。黑色的圆圈表示估计的点,灰色的点表示真实点。上方一侧的视图(左)。一个坐标平面观看这些数据点的近景图像(右)
5.2.2 由三维点计算照相机矩阵
如果已经知道了一些三维点及其图像投影,我们可以使用直接线性变换的方法来计算照相机矩阵 P。本质上,这是三角剖分方法的逆问题,有时我们将其称为照相机反切法。利用该方法恢复照相机矩阵同样也是一个最小二乘问题。
然后,我们可以使用 SVD 分解估计出照相机矩阵。利用上面讲述的矩阵操作,我们可以直接写出相应的代码。将下面的函数添加到 sfm.py 文件中:
def compute_P(x,X):
""" 由二维 - 三维对应对(齐次坐标表示)计算照相机矩阵 """
n = x.shape[1]
if X.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建用于计算 DLT 解的矩阵
M = zeros((3*n,12+n))
for i in range(n):
M[3*i,0:4] = X[:,i]
M[3*i+1,4:8] = X[:,i]
M[3*i+2,8:12] = X[:,i]
M[3*i:3*i+3,i+12] = -x[:,i]
U,S,V = linalg.svd(M)
return V[-1,:12].reshape((3,4))
该函数的输入参数为图像点和三维点,构造出上述所示的 M 矩阵。最后一个特征向量的前 12 个元素是照相机矩阵的元素,经过重新排列成矩阵形状后返回。
下面,在我们的样本数据集上测试算法的性能。下面的代码会选出第一个视图中的一些可见点(使用对应列表中缺失的数值),将它们转换为齐次坐标表示,然后估计照相机矩阵:
import sfm, camera
corr = corr[:,0] # 视图 1
ndx3D = where(corr>=0)[0] # 丢失的数值为 -1
ndx2D = corr[ndx3D]
# 选取可见点,并用齐次坐标表示
x = points2D[0][:,ndx2D] # 视图 1
x = vstack( (x,ones(x.shape[1])) )
X = points3D[:,ndx3D]
X = vstack( (X,ones(X.shape[1])) )
# 估计 P
Pest = camera.Camera(sfm.compute_P(x,X))
# 比较!
print Pest.P / Pest.P[2,3]
print P[0].P / P[0].P[2,3]
xest = Pest.project(X)
# 绘制图像
figure()
imshow(im1)
plot(x[0],x[1],'bo')
plot(xest[0],xest[1],'r.')
axis('off')
show()
为了检查照相机矩阵的正确性,将它们以归一化的格式(除以最后一个元素)打印到控制台。输出如下所示:
[[ 1.06520794e+00 -5.23431275e+01 2.06902749e+01 5.08729305e+02]
[ -5.05773115e+01 -1.33243276e+01 -1.47388537e+01 4.79178838e+02]
[ 3.05121915e-03 -3.19264684e-02 -3.43703738e-02 1.00000000e+00]]
[[ 1.06774679e+00 -5.23448212e+01 2.06926980e+01 5.08764487e+02]
[ -5.05834364e+01 -1.33201976e+01 -1.47406641e+01 4.79228998e+02]
[ 3.06792659e-03 -3.19008054e-02 -3.43665129e-02 1.00000000e+00]]
上面是估计出的照相机矩阵,下面是数据集的创建者计算出的照相机矩阵。可以看到,它们的元素几乎完全相同。最后,使用估计出的照相机矩阵投影这些三维点,然后绘制出投影后的结果。结果如图 5-6 所示,真实点用圆圈表示,估计出的照相机投影点用点表示。

图 5-6:使用估计出的照相机矩阵来计算视图 1 中的投影点
5.2.3 由基础矩阵计算照相机矩阵
在两个视图的场景中,照相机矩阵可以由基础矩阵恢复出来。假设第一个照相机矩阵归一化为 P1=[I|0],现在我们需要计算出第二个照相机矩阵 P2。研究分为两类,未标定的情况和已标定的情况。
1. 未标定的情况——投影重建
在没有任何照相机内参数知识的情况下,照相机矩阵只能通过射影变换恢复出来。也就是说,如果利用照相机的信息来重建三维点,那么该重建只能由射影变换计算出来(你可以得到整个投影场景中无畸变的重建点)。在这里,我们不考虑角度和距离。
因此,在无标定的情况下,第二个照相机矩阵可以使用一个(3×3)的射影变换得出。一个简单的方法是:

下面是具体的代码:
def compute_P_from_fundamental(F):
""" 从基础矩阵中计算第二个照相机矩阵(假设 P1 = [I 0])"""
e = compute_epipole(F.T) # 左极点
Te = skew(e)
return vstack((dot(Te,F.T).T,e)).T
这里,我们使用的 skew() 函数定义如下:
def skew(a):
""" 反对称矩阵 A,使得对于每个 v 有 a×v=Av """
return array([[0,-a[2],a[1]],[a[2],0,-a[0]],[-a[1],a[0],0]])
将上面的两个函数添加到 sfm.py 文件中。
2. 已标定的情况——度量重建
在已经标定的情况下,重建会保持欧式空间中的一些度量特性(除了全局的尺度参数)。在重建三维场景中,已标定的例子更为有趣。

在新的图像坐标系下,点同样满足之前的基础矩阵方程:

在标定归一化的坐标系下,基础矩阵称为本质矩阵。为了区别为标定后的情况,以及归一化了的图像坐标,我们通常将其记为 E,而非 F。
从本质矩阵恢复出的照相机矩阵中存在度量关系,但有四个可能解。因为只有一个解产生位于两个照相机前的场景,所以我们可以轻松地从中选出来。
下面是计算这 4 个解的算法(参阅文献 [13] 获取更多细节)。将该函数添加到 sfm.py 文件中:
def compute_P_from_essential(E):
""" 从本质矩阵中计算第二个照相机矩阵(假设 P1 = [I 0])
输出为 4 个可能的照相机矩阵列表 """
# 保证 E 的秩为 2
U,S,V = svd(E)
if det(dot(U,V))<0:
V = -V
E = dot(U,dot(diag([1,1,0]),V))
# 创建矩阵(Hartley)
Z = skew([0,0,-1])
W = array([[0,-1,0],[1,0,0],[0,0,1]])
# 返回所有(4 个)解
P2 = [vstack((dot(U,dot(W,V)).T,U[:,2])).T,
vstack((dot(U,dot(W,V)).T,-U[:,2])).T,
vstack((dot(U,dot(W.T,V)).T,U[:,2])).T,
vstack((dot(U,dot(W.T,V)).T,-U[:,2])).T]
return P2
首先,该函数确保本质矩阵的秩为 2(本质矩阵有两个相等的非零奇异值)。然后,按照文献 中的方法,计算出这 4 个解。关于如何挑选正确的解,我们将在后面的例子中讲解。
本节涵盖了从图像集计算出三维重建所需的所有理论
5.3 多视图重建
下面让我们来看,如何使用上面的理论从多幅图像中计算出真实的三维重建。由于照相机的运动给我们提供了三维结构,所以这样计算三维重建的方法通常称为 SfM(Structure from Motion,从运动中恢复结构)。
假设照相机已经标定,计算重建可以分为下面 4 个步骤:
(1) 检测特征点,然后在两幅图像间匹配;
(2) 由匹配计算基础矩阵;
(3) 由基础矩阵计算照相机矩阵;
(4) 三角剖分这些三维点。
我们已经具备了完成上面 4 个步骤所需的所有工具。但是当图像间的点对应包含不正确的匹配时,我们需要一个稳健的方法来计算基础矩阵。
5.3.1 稳健估计基础矩阵
类似于稳健计算单应性矩阵(3.3 节),当存在噪声和不正确的匹配时,我们需要估计基础矩阵。和前面的方法一样,我们使用 RANSAC 方法,只不过这次结合了八点算法。注意,八点算法在平面场景中会失效,所以,如果场景点都位于平面上,就不能使用该算法。
将下面的类添加到 sfm.py 文件中:
class RansacModel(object):
""" 用从 http://www.scipy.org/Cookbook/RANSAC 下载的 ransac.py 计算基础矩阵的类 """
def __init__(self,debug=False):
self.debug = debug
def fit(self,data):
""" 使用选择的 8 个对应计算基础矩阵 """
# 转置,并将数据分成两个点集
data = data.T
x1 = data[:3,:8]
x2 = data[3:,:8]
# 估计基础矩阵,并返回
F = compute_fundamental_normalized(x1,x2)
return F
def get_error(self,data,F):
""" 计算所有对应的 x^T F x,并返回每个变换后点的误差 """
# 转置,并将数据分成两个点集
data = data.T
x1 = data[:3]
x2 = data[3:]
# 将 Sampson 距离用作误差度量
Fx1 = dot(F,x1)
Fx2 = dot(F,x2)
denom = Fx1[0]**2 + Fx1[1]**2 + Fx2[0]**2 + Fx2[1]**2
err = ( diag(dot(x1.T,dot(F,x2))) )**2 / denom
# 返回每个点的误差
return err
和之前一样,我们需要 fit() 和 get_error() 方法。这里采用的错误衡量方法是Sampson 距离。fit() 方法会选择 8 个点,然后使用归一化的八点算法:
def compute_fundamental_normalized(x1,x2):
""" 使用归一化的八点算法,由对应点(x1,x2 3×n 的数组)计算基础矩阵 """
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# 归一化图像坐标
x1 = x1 / x1[2]
mean_1 = mean(x1[:2],axis=1)
S1 = sqrt(2) / std(x1[:2])
T1 = array([[S1,0,-S1*mean_1[0]],[0,S1,-S1*mean_1[1]],[0,0,1]])
x1 = dot(T1,x1)
x2 = x2 / x2[2]
mean_2 = mean(x2[:2],axis=1)
S2 = sqrt(2) / std(x2[:2])
T2 = array([[S2,0,-S2*mean_2[0]],[0,S2,-S2*mean_2[1]],[0,0,1]])
x2 = dot(T2,x2)
# 使用归一化的坐标计算F
F = compute_fundamental(x1,x2)
# 反归一化
F = dot(T1.T,dot(F,T2))
return F/F[2,2]
该函数将图像点归一化为零均值固定方差。
接下来,我们在函数中使用该类。将下面的函数添加到 sfm.py 文件中:
def F_from_ransac(x1,x2,model,maxiter=5000,match_theshold=1e-6):
""" 使用 RANSAN 方法(ransac.py,来自 http://www.scipy.org/Cookbook/RANSAC),
从点对应中稳健地估计基础矩阵F
输入:使用齐次坐标表示的点 x1,x2(3×n 的数组)"""
import ransac
data = vstack((x1,x2))
# 计算F,并返回正确点索引
F,ransac_data = ransac.ransac(data.T,model,8,maxiter,match_theshold,20,
return_all=True)
return F, ransac_data['inliers']
这里,我们返回最佳基础矩阵 F,以及正确点的索引,这样可以知道哪些匹配和 F矩阵是一致的。与单应性矩阵估计相比,我们增加了默认的最大迭代次数,改变了匹配的阈值(之前使用像素,现在使用 Sampson 距离来衡量)
5.3.2 三维重建示例
在本节中,我们将观察一个重建三维场景的完整例子。我们使用由已知标定矩阵的照相机拍摄的两幅图像。该图像是著名的恶魔岛监狱,如图 5-7 所示。

图 5-7:在一个场景中使用不同视角拍摄图像对
我们将该处理代码分成若干块,使得代码更容易理解。首先,提取、匹配特征,然后估计基础矩阵和照相机矩阵:
import homography
import sfm
import sift
# 标定矩阵
K = array([[2394,0,932],[0,2398,628],[0,0,1]])
# 载入图像,并计算特征
im1 = array(Image.open('alcatraz1.jpg'))
sift.process_image('alcatraz1.jpg','im1.sift')
l1,d1 = sift.read_features_from_file('im1.sift')
im2 = array(Image.open('alcatraz2.jpg'))
sift.process_image('alcatraz2.jpg','im2.sift')
l2,d2 = sift.read_features_from_file('im2.sift')
# 匹配特征
matches = sift.match_twosided(d1,d2)
ndx = matches.nonzero()[0]
# 使用齐次坐标表示,并使用 inv(K) 归一化
x1 = homography.make_homog(l1[ndx,:2].T)
ndx2 = [int(matches[i]) for i in ndx]
x2 = homography.make_homog(l2[ndx2,:2].T)
x1n = dot(inv(K),x1)
x2n = dot(inv(K),x2)
# 使用 RANSAC 方法估计 E
model = sfm.RansacModel()
E,inliers = sfm.F_from_ransac(x1n,x2n,model)
# 计算照相机矩阵(P2 是 4 个解的列表)
P1 = array([[1,0,0,0],[0,1,0,0],[0,0,1,0]])
P2 = sfm.compute_P_from_essential(E)

从照相机矩阵的列表中,挑选出经过三角剖分后,在两个照相机前均含有最多场景点的照相机矩阵:
# 选取点在照相机前的解
ind = 0
maxres = 0
for i in range(4):
# 三角剖分正确点,并计算每个照相机的深度
X = sfm.triangulate(x1n[:,inliers],x2n[:,inliers],P1,P2[i])
d1 = dot(P1,X)[2]
d2 = dot(P2[i],X)[2]
if sum(d1>0)+sum(d2>0) > maxres:
maxres = sum(d1>0)+sum(d2>0)
ind = i
infront = (d1>0) & (d2>0)
# 三角剖分正确点,并移除不在所有照相机前面的点
X = sfm.triangulate(x1n[:,inliers],x2n[:,inliers],P1,P2[ind])
X = X[:,infront]
循环遍历这 4 个解,每次对对应于正确点的三维点进行三角剖分。将三角剖分后的图像投影回图像后,深度的符号由每个图像点的第三个数值给出。我们保存了正向最大深度的索引;对于和最优解一致的点,用相应的布尔量保存了信息,这样可以取出真正在照相机前面的点。因为所有估计中都存在噪声和误差,所以即便使用正确的照相机矩阵,也存在一些点仍位于某个照相机后面的风险。首先获得正确的解,然后对这些正确的点进行三角剖分,最后保留位于照相机前方的点。
现在可以绘制出该三维重建:
# 绘制三维图像
from mpl_toolkits.mplot3d import axes3d
fig = figure()
ax = fig.gca(projection='3d')
ax.plot(-X[0],X[1],X[2],'k.')
axis('off')
和我们的坐标系相比,使用 mplot3d 绘制三维图像需要将第一个坐标值取相反数,所以这里改变其符号。
然后,可以在每个视图中绘制出二次投影:
# 绘制 X 的投影
import camera
# 绘制三维点
cam1 = camera.Camera(P1)
cam2 = camera.Camera(P2[ind])
x1p = cam1.project(X)
x2p = cam2.project(X)
# 反 K 归一化
x1p = dot(K,x1p)
x2p = dot(K,x2p)
figure()
imshow(im1)
gray()
plot(x1p[0],x1p[1],'o')
plot(x1[0],x1[1],'r.')
axis('off')
figure()
imshow(im2)
gray()
plot(x2p[0],x2p[1],'o')
plot(x2[0],x2[1],'r.')
axis('off')
show()
将这些三维点投影后,可以通过乘以标定矩阵的方式来弥补初始归一化对点的影响。结果输出如图 5-8 所示。可以看到,二次投影后的点和原始特征位置不完全匹配,但是相当接近。当然,可以进一步调整照相机矩阵来提高重建和二次投影的性能,但是这超出了这个简单例子的范畴。
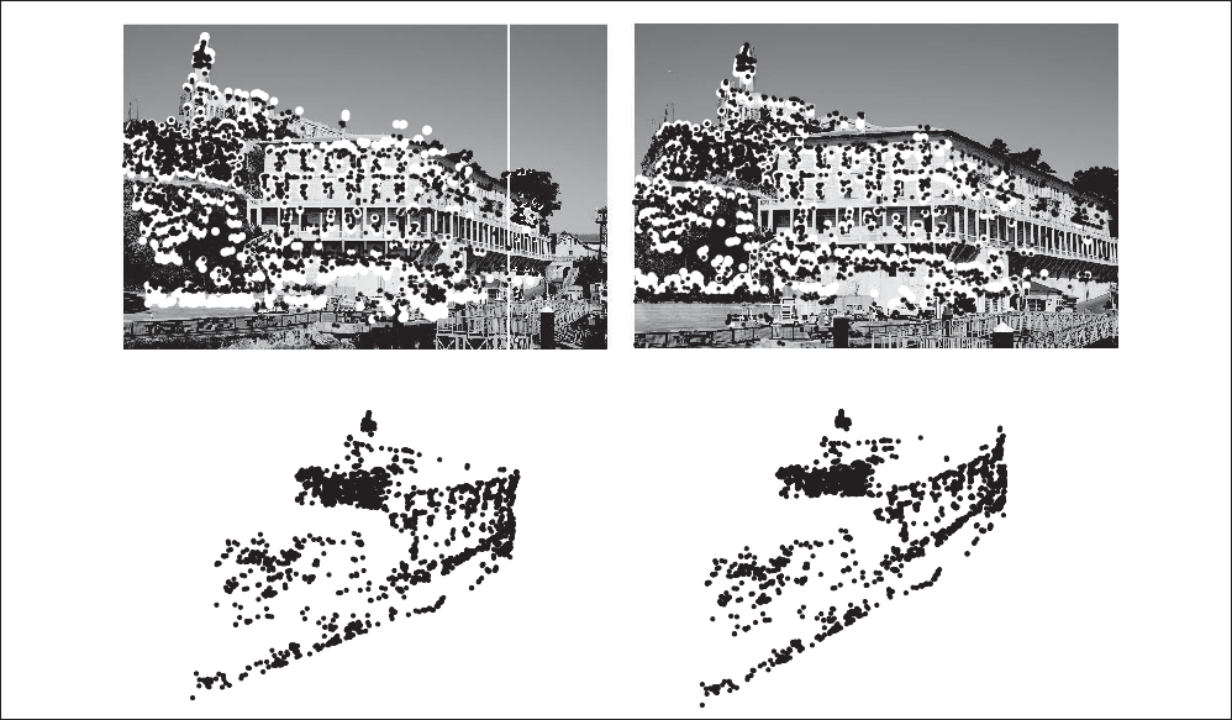
图 5-8:使用图像匹配从一对图像中计算三维重建:带有特征点(黑色)和二次投影重建的 三维点(白色)的两幅图像(上);三维重建(下)
5.3.3 多视图的扩展示例
多视图重建有一些步骤和进一步的扩展,但是不能在本书中全部介绍。为了方便读者进一步阅读,下面提供关于一些有关内容及其参考文献。
1. 多视图
当我们有同一场景的多个视图时,三维重建会变得更准确,包括更多的细节信息。因为基础矩阵只和一对视图相关,所以该过程带有很多图像,和之前的处理有些不同。对于视频序列,我们可以使用时序关系,在连续的帧对中匹配特征。相对方位需要从每个帧对增量地加入下一个帧对,(与图 3-12 中我们在全景图例子中加入单应性矩阵相同)。该方法非常有效,同时可以使用跟踪有效地找到对应点(关于跟踪的更多知识,参阅 10.4 节)。一个问题是误差会在加入的视图中积累。该问题可以由最后的优化步骤来解决,参见下文。对于静止的图像,一个办法是找到一个中央参考视图,然后计算与之有关的所有其他照相机矩阵。另一个办法是计算一个图像对的照相机矩阵和三维重建,然后增量地加入新的图像和三维点,参见参考文献。另外,还有一些方法可以同时由三个视图计算三维重建和照相机位置;但除此之外,我们还需要使用增量的方法。
2. 光束法平差
从图 5-8 简单三维重建的例子,我们可以清楚地看出,恢复出的点的位置和由估计的基础矩阵计算出的照相机矩阵都存在误差。在多个视图的计算中,这些误差会进一步累积。因此,多视图重建的最后一步,通常是通过优化三维点的位置和照相机参数来减少二次投影误差。该过程称为光束法平差。或者可以从 http://en.wikipedia.org/wiki/Bundle_adjustment 参阅该方法的概述。
3. 自标定
在未标定照相机的情形中,有时可以从图像特征来计算标定矩阵。该过程称为自标定。根据在照相机标定矩阵参数上做出的假设,以及可用的图像数据的类型(特征匹配、平行线、平面等),我们有很多不同的自标定算法。作为标定的附注,值得一提的是一个叫做 extract_focal.pl 的有用脚本,它是 SfM 系统(http://phototour.cs.washington.edu/bundler/)的一部分。对于常见的照相机,该脚本基于图像 EXIF 数据,使用一个查找表来估计焦距。
5.4 立体图像
一个多视图成像的特殊例子是立体视觉(或者立体成像),即使用两台只有水平(向一侧)偏移的照相机观测同一场景。当照相机的位置如上设置,两幅图像具有相同的图像平面,图像的行是垂直对齐的,那么称图像对是经过矫正的。该设置在机器人学中很常见,常被称为立体平台。通过将图像扭曲到公共的平面上,使外极线位于图像行上,任何立体照相机设置都能得到矫正(我们通常构建立体平台来产生经过矫正的图像对)。这超出了本章节的范围。假设两幅图像经过了矫正,那么对应点的寻找限制在图像的同一行上。一旦找到对应点,由于深度是和偏移成正比的,那么深度(Z 坐标)可以直接由水平偏移来计算,
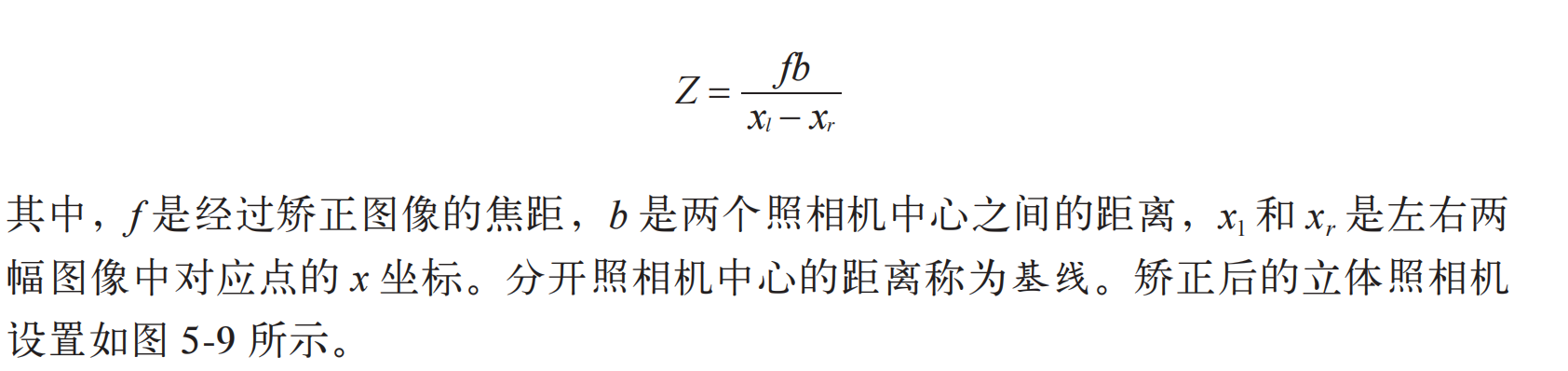
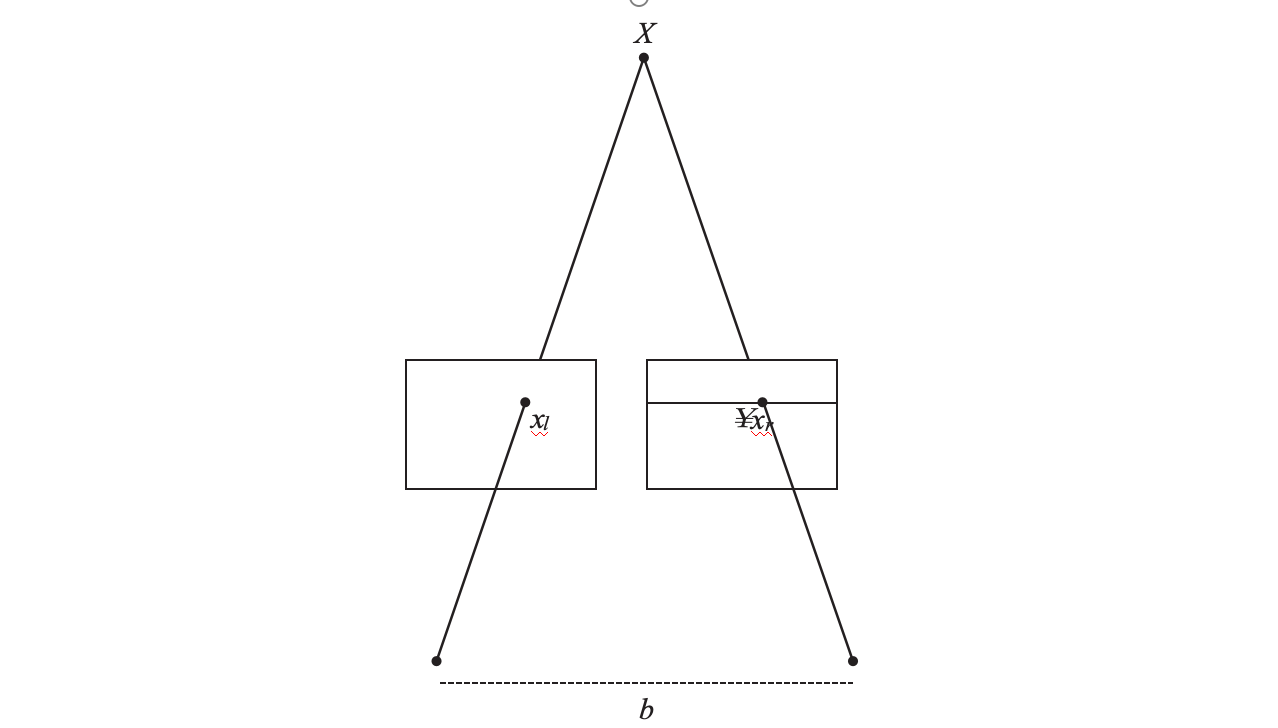
图 5-9:矫正后立体照相机设置的示意图,其中对应点位于两幅图像的同一行
立体重建(有时称为致密深度重建)就是恢复深度图(或者相反,视差图),图像中每个像素的深度(或者视差)都需要计算出来。这是计算机视觉中的经典问题,有很多算法可以解决该问题。米德尔伯里学院立体视觉网页(http://vision.middlebury.edu/stereo/)保持更新最佳算法的评估,以及该算法的代码和许多细节描述。在下一节中,我们会讲解基于归一化互相关的立体重建算法。
计算视差图
在该立体重建算法中,我们将对于每个像素尝试不同的偏移,并按照局部图像周围归一化的互相关值,选择具有最好分数的偏移,然后记录下该最佳偏移。因为每个偏移在某种程度上对应于一个平面,所以该过程有时称为扫平面法。虽然该方法并不是立体重建中最好的方法,但是非常简单,通常会得出令人满意的结果。当密集地应用在图像中时,归一化的互相关值可以很快地计算出来。这和我们在第2 章中应用于稀疏点对应的不同。我们使用每个像素周围的图像块(根本上说,是局部周边图像)来计算归一化的互相关。对于这里的情形,我们可以在像素周围重新写出公式(2.3)中的 NCC,如下所示

我们在前面跳过了归一化常数(这里不需要),然后对该像素周围局部像素块中的像素求和。现在,我们要将图像中的每个像素进行该操作。这三个求和操作是在局部图像块区域上进行的,我们可以使用图像滤波器来快速计算,这与我们在模糊和求导操作中使用的技巧一样。ndimage.filters 模块中的 uniform_filter() 函数可以在一个矩形
图像块中计算相加。
下面是扫平面法的具体实现代码,该函数返回每个像素的最佳视差。创建 stereo.py文件,将下面的代码添加进去:
def plane_sweep_ncc(im_l,im_r,start,steps,wid):
""" 使用归一化的互相关计算视差图像 """
m,n = im_l.shape
# 保存不同求和值的数组
mean_l = zeros((m,n))
mean_r = zeros((m,n))
s = zeros((m,n))
s_l = zeros((m,n))
s_r = zeros((m,n))
# 保存深度平面的数组
dmaps = zeros((m,n,steps))
# 计算图像块的平均值
filters.uniform_filter(im_l,wid,mean_l)
filters.uniform_filter(im_r,wid,mean_r)
# 归一化图像
norm_l = im_l - mean_l
norm_r = im_r - mean_r
# 尝试不同的视差
for displ in range(steps):
# 将左边图像移动到右边,计算加和
filters.uniform_filter(roll(norm_l,-displ-start)*norm_r,wid,s) # 和归一化
filters.uniform_filter(roll(norm_l,-displ-start)*roll(norm_l,-displ-start),wid,s_l)
filters.uniform_filter(norm_r*norm_r,wid,s_r) # 和反归一化
# 保存 ncc 的分数
dmaps[:,:,displ] = s/sqrt(s_l*s_r)
# 为每个像素选取最佳深度
return argmax(dmaps,axis=2)
首先,因为 uniform_filter() 函数的输入参数为数组,我们需要创建用于保存滤波结果的一些数组。然后,我们创建一个数组来保存每个平面,从而能够在最后一个纬度上使用 argmax() 函数找到对于每个像素的最佳深度。该函数从 start 偏移出发,在所有的 steps 偏移上迭代。使用 roll() 函数平移一幅图像,然后使用滤波计算NCC 的三个求和操作。下面是载入图像,并使用该函数计算偏移图的完整例子:
import stereo
im_l = array(Image.open('scene1.row3.col3.ppm').convert('L'),'f')
im_r = array(Image.open('scene1.row3.col4.ppm').convert('L'),'f')
# 开始偏移,并设置步长
steps = 12
start = 4
# ncc 的宽度
wid = 9
res = stereo.plane_sweep_ncc(im_l,im_r,start,steps,wid)
import scipy.misc
scipy.misc.imsave('depth.png',res)
这里首先从经典“tsukuba”数据集中载入一对图像,然后将其灰度化。接下来,设置扫平面函数所需的参数,包括尝试偏移的数目、初始值和 NCC 路径的宽度。你会发现,该方法非常快,至少快于使用 NCC 进行特征匹配。这也是使用滤波器来计算的原因。
该方法同样适用于其他滤波器。均匀滤波器给定正方形图像块中所有像素相同的权值。但是,在一些例子中,其他滤波器对 NCC 的计算可能更为适用。下面是使用高斯滤波器替换均匀滤波器,产生更加平滑视差图的例子。将其添加到 stereo.py 文件中:
def plane_sweep_gauss(im_l,im_r,start,steps,wid):
""" 使用带有高斯加权周边的归一化互相关计算视差图像 """
m,n = im_l.shape
# 保存不同加和的数组
mean_l = zeros((m,n))
mean_r = zeros((m,n))
s = zeros((m,n))
s_l = zeros((m,n))
s_r = zeros((m,n))
# 保存深度平面的数组
dmaps = zeros((m,n,steps))
# 计算平均值
filters.gaussian_filter(im_l,wid,0,mean_l)
filters.gaussian_filter(im_r,wid,0,mean_r)
# 归一化图像
norm_l = im_l - mean_l
norm_r = im_r - mean_r
# 尝试不同的视差
for displ in range(steps):
# 将左边图像移动到右边,计算加和
filters.gaussian_filter(roll(norm_l,-displ-start)*norm_r,wid,0,s) # 和归一化
filters.gaussian_filter(roll(norm_l,-displ-start)*roll(norm_l,-displ-start),wid,
0,s_l)
filters.gaussian_filter(norm_r*norm_r,wid,0,s_r) # 和反归一化
# 保存 ncc 的分数
dmaps[:,:,displ] = s/sqrt(s_l*s_r)
# 为每个像素选取最佳深度
return argmax(dmaps,axis=2)
除了在滤波中使用了额外的参数,该代码和均匀滤波的代码相同。我们需要在gaussian_filter() 函数中传入零参数来表示我们使用的是标准高斯函数,而不是其他任何导数。你可以像前面的扫平面函数一样来使用该函数。图 5-10 和图 5-11 所示为这两个扫平面实现操作在一些标准立体基准图像上的结果。可以从 http://vision.middlebury.edu/stereo/data/ 下载。这里我们使用“tsukuba”和“cones”图像,在标准版本中设置 wid 为 9,高斯版本中设置 wid 为3。上面一行图像所示为图像对,左下方图像是标准的 NCC 扫平面法重建的视差图,右下方是高斯版本的视差图。可以看到,与标准版本相比,高斯版本具有较少的噪声,但缺少很多细节信息。
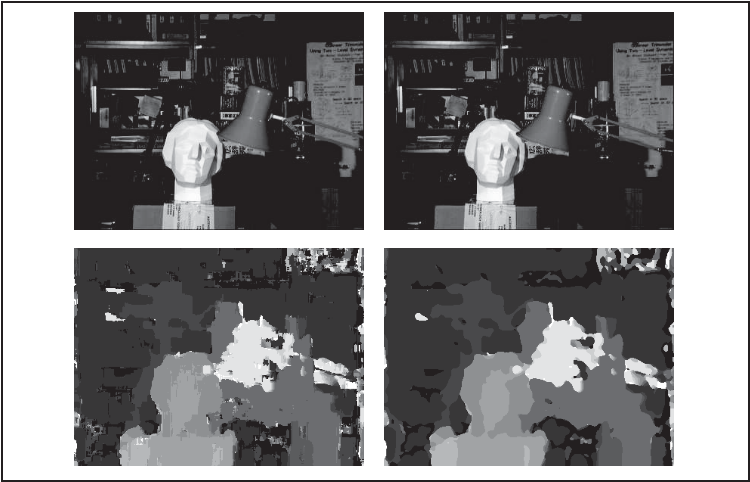
图 5-10:使用归一化互相关从一对立体图像中计算视差图
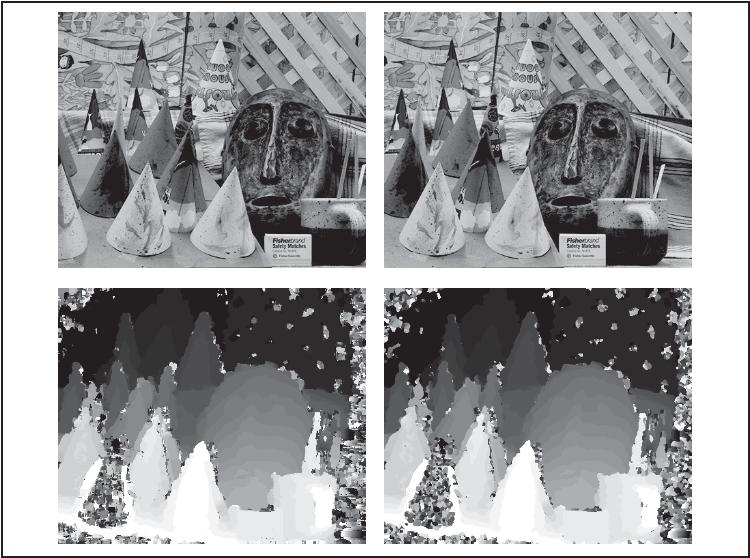
图 5-11:使用归一化互相关从一对立体图像中计算视差图
相关文章:
第 5 章多视图几何
本章讲解如何处理多个视图,以及如何利用多个视图的几何关系来恢复照相机位置信息和三维结构。通过在不同视点拍摄的图像,我们可以利用特征匹配来计算出三维场景点以及照相机位置。本章会介绍一些基本的方法,展示一个三维重建的完整例子&#…...

IOS 开发者账号注册流程
注册步骤 准备资料 营业执照 法人信息(电话、身份证信息) 注册邮箱(公司邮箱) 开发者信息(电话、身份证信息、邮箱)1. 注册AppleID 注册地址: https://appleid.apple.com/account 填写表单信…...

netty之NioEventLoop和NioEventLoopGroup
类结构图 NioEventLoopGroup #mermaid-svg-5g1iVjr5oyhqXK92 {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-5g1iVjr5oyhqXK92 .error-icon{fill:#552222;}#mermaid-svg-5g1iVjr5oyhqXK92 .error-text{fill:#55222…...

睿考网:中级经济师考试题型有哪些?
中级经济师考试时间在每年的11月份,2024年考试时间定于11月16-17日,考试科目为《经济基础知识》与《专业知识与实务》两科。 《专业知识与实务》有10个专业,分别是工商管理、知识产权、农业经济、财政税收、金融、保险、运输经济、人力资源管…...

kubernetes集群部署Confluence 7.2.0+mysql 5.7(自测有效)
背景介绍: Confluence是一个专业的企业知识管理与协同软件。使用简单,但它强大的编辑和站点管理特征能够帮助团队成员之间共享信息、文档协作、集体讨论,信息推送。 这里介绍的使用的是Confluence 7.2.0版本的。 一、在kubernetes集群部署 1…...

Vmware ubuntu22.04 虚拟机 连接Windows主机虚拟串口
1. Windows虚拟串口配置 虚拟串口下载:虚拟串口 VSPD 的使用_vspd使用教程-CSDN博客 虚拟串口使用:使用虚拟串口在一台电脑上模拟串口通讯_pc怎么模拟一主多从串口-CSDN博客 2. ubuntu虚拟串口配置 Vmware ubuntu22.04 虚拟机 连接windows主机虚拟串口…...

Postgresql碎片整理
创建pgstattuple 扩展 CREATE EXTENSION pgstattuple 获取表的元组(行)信息,包括空闲空间的比例和行的平均宽度 SELECT * FROM pgstattuple(表名); 查看表和索引大小 SELECT pg_relation_size(表名), pg_relation_size(索引名称); 清理碎片方…...

【最新华为OD机试E卷-支持在线评测】字母组合(200分)多语言题解-(Python/C/JavaScript/Java/Cpp)
🍭 大家好这里是春秋招笔试突围 ,一枚热爱算法的程序员 💻 ACM金牌🏅️团队 | 大厂实习经历 | 多年算法竞赛经历 ✨ 本系列打算持续跟新华为OD-E/D卷的多语言AC题解 🧩 大部分包含 Python / C / Javascript / Java / Cpp 多语言代码 👏 感谢大家的订阅➕ 和 喜欢�…...

力扣493.翻转对
class Solution {public static int MAXN 50001;public static int[] help new int[MAXN];public static void main(String[] args) {}public static int reversePairs(int[] arr) {return counts(arr, 0, arr.length - 1);}//统计l …… r上反转对的数量,同时计算…...

潜望长焦+快充:vivo X200系列,小尺寸手机的大突破
在智能手机市场日益激烈的竞争中,厂商们不断推陈出新,以满足消费者多样化的需求。vivo作为中国知名的智能手机品牌,一直以其创新的设计和强大的功能赢得市场的认可。 近日,vivo X200系列的即将发布引起了广泛关注,特别…...
)
Stable Diffusion训练LoRA模型参数详细说明(阿里巴巴堆友AI)
工具:线上模型训练堆友AI 一、训练参数 批量大小 (Batch Size) 作用:每次训练中使用的样本数量。参考值:可以从 8 到 64,取决于显存大小。 训练轮数 (Epochs) 作用:完整遍历训练数据的次数。参考值:通…...

Learn ComputeShader 12 Setting up a buffer-based particle effect
unity有自己的粒子系统,但是这次我们要尝试创建一个我们自己的粒子系统,而且使用计算着色器有下面这些好处。总而言之,计算着色器适合处理大规模的数据集。例如,能够高效地处理数万个甚至数百万个粒子的计算。这对于粒子系统这样的…...

【STL中容器汇总】map、list、vector等详解
容器学习分享 1、STL简介1.1、STL六大组件 2、vector容器2.1、vector 基本操作2.2、vector容器示例2.3、vector容器存放自定义数据类型示例2.3、vector嵌套vector示例 3、list 容器3.1使用示例3.2、list容器基本函数 4、map容器4.1、map函数原型4.2、map函数示例 1、STL简介 ST…...

Semantic Kernel + Natasha:一小时快速生成100个API的奇迹
大家好,我今天带来了一个让人瞠目结舌的实验:在一小时内快速生成了100个API! 其实如果手速高,可以更多。要知道,这得益于之前介绍过的Natasha —— 一个可以动态编译并加载代码的神奇工具。 动态编程神器! 探秘.Net…...

rancher upgrade 【rancher 升级】
文章目录 1. 背景2. 下载3. 安装4. 检查5. 测试5.1 创建项目5.2 创建应用5.3 删除集群5.4 注册集群 1. 背景 rancher v2.8.2 升级 v2.9.1 2. 下载 下载charts helm repo add rancher-latest https://releases.rancher.com/server-charts/latest helm repo update helm fetc…...

【Linux】多线程:线程互斥、互斥锁、线程安全
目录 一、多线程访问公共资源时所产生的问题 二、互斥相关背景概念 互斥量mutex(锁)的引入 三、互斥量 1、初始化互斥量(mutex) 2、互斥量加锁 3、互斥量解锁 4、 销毁互斥量 四、互斥量的使用 1、使用静态互斥量 2、…...

进程之间的通信方式
前言 每个进程的用户地址空间都是独立的,一般而言是不能互相访问的,但内核空间是每个进程都共享的,所以进程之间要通信必须通过内核。 Linux提供了以下进程通信方式: 一、管道 所谓的管道,就是内核里面的一串缓存。…...

动手学深度学习(pytorch)学习记录26-卷积神经网路(LeNet)[学习记录]
目录 LeNet模型训练 LeNet 总体来看,LeNet(LeNet-5)由两个部分组成: 卷积编码器:由两个卷积层组成; 全连接层密集块:由三个全连接层组成。 每个卷积块中的基本单元是一个卷积层、一个sigmoid激活函数和平均…...
log4j 和 java.lang.OutOfMemoryError PermGen space
还是OneCoder在项目中沙箱的问题,用classloader隔离做的沙箱,反复运行用户的任务,出现永生区内存溢出: java.lang.OutOfMemoryError: PermGen space 这个问题在tomcat重复热部署的时候其实比较常见。其道理也和我们沙箱的道理基本…...

2024.9.9营养小题【2】
营养: 1、什么数是丑数? 2、数学数学,丑数的数学意义,哎,数学思维我是忘干净了。 3、可以把while循环换成for循环。由此又想到了一点,三个循环结构各有使用场景。 for(;n%factors[i]0;n/factors[i]){}...

Unity风格化山脉管线:轮廓生成+分层材质+程序植被
1. 这不是“又一个山体素材包”,而是一套可工业化复用的风格化地形生产管线你有没有试过在Unity里拖进一个山体模型,调整光照后发现——它看起来像照片,但就是不像《原神》《空之轨迹》或者《Ori》里那种呼吸感十足的、带着手绘温度的山&…...

微信抓包全链路实战:Proxifier+Fiddler+Burp协同排障指南
1. 为什么微信抓包成了“玄学”,而你总在重装系统? 微信抓包这件事,我干了七年,从2017年用Charles配iOS证书开始,到今天手头常备三套环境:Mac上跑Fiddler EverywhereProxifier组合应对企业微信定制版&…...

Spring Boot + MyBatis服务启动流程,新增代码跑通流程,映射规则,常见问题定位
一、服务启动流程 零代码(仅需配置文件和依赖)。 顺序固定,由框架保证。 一旦某个步骤失败(如 XML 解析错误),整个启动失败。 二、新增代码跑通流程 全手动,需熟悉 MyBatis 映射规则、Spring…...

从实战出发:聊聊Serial口静态路由在老旧网络设备迁移中的那些事儿
从实战出发:聊聊Serial口静态路由在老旧网络设备迁移中的那些事儿 第一次在机房里见到那台积满灰尘的Cisco 1841时,我差点以为这是个博物馆展品。但客户坚持说这台服役超过15年的老伙计承载着他们最重要的生产线控制数据,任何闪失都可能造成六…...

新手学习Linux系统的11点建议
随着Linux应用的扩展许多朋友开始接触Linux,根据学习Windwos的经验往往有一些茫然的感觉:不知从何处开始学起。这里介绍学习Linux的一些建议。一、从基础开始:常常有些朋友在Linux论坛问一些问题,不过,其中大多数的问题…...

18分钟攻破GitHub:TeamPCP供应链攻击全技术解析与防御新范式
摘要 2026年5月18日,威胁组织TeamPCP通过一条精心设计的多级供应链攻击链,仅用18分钟就成功入侵全球最大代码托管平台GitHub的内部系统,窃取了约3800个核心私有仓库,涵盖Copilot、CodeQL、GitHub Actions等所有关键产品的源代码。…...

DMXAPI:国产多模态大模型API聚合平台,让开发者一键调用通义千问等主流模型
在国产大模型百花齐放的今天,如何高效、稳定地接入各类模型能力,成为开发者和企业面临的核心痛点。DMXAPI 应运而生,作为中国多模态大模型API聚合平台,致力于打造"国产模型一站式调用中心",让开发者无需对接…...

【限时解密】Lindy自动化方案未公开的4层权限熔断机制:为什么92%的企业跳过这步就触发合规雷区?
更多请点击: https://kaifayun.com 第一章:Lindy人力资源自动化方案的合规性底层逻辑 Lindy人力资源自动化方案并非简单地将流程数字化,而是以全球主流劳动法规为约束边界,将合规性内化为系统架构的刚性层。其底层逻辑建立在“规…...
)
美容顾问转型AI训练师:2024紧缺新职业认证路径(含国家人社部备案课程编号)
更多请点击: https://kaifayun.com 第一章:AI Agent美容行业应用概述 AI Agent正以前所未有的深度融入美容行业,从智能肤质分析、个性化护肤方案生成,到虚拟试妆、客户行为预测与自动化私域运营,其核心价值在于将非结…...

VutronMusic:构建现代化跨平台音乐播放器的技术实现方案
VutronMusic:构建现代化跨平台音乐播放器的技术实现方案 【免费下载链接】VutronMusic 高颜值的第三方网易云播放器;支持流媒体音乐,如navidrome、jellyfin、emby;支持本地音乐播放、离线歌单、逐字歌词、桌面歌词、Touch Bar歌词…...