高精度定位系统中的关键技术:GGA、EHP、RTMC、IMU、GNSS、INS 和 RTK 的协同工作
文章目录
- 0. 概述
- 1. GGA:标准的定位数据格式
- 2. EHP:增强高度精度
- 3. RTMC:实时监控与控制
- 4. IMU 和 INS:惯性测量和导航系统
- 5. GNSS:全球导航卫星系统
- 6. RTK:实时动态差分定位
- 7. 各技术的融合与协同
- GPS 数据融合
- 综合融合
- 应用场景
- 总结
0. 概述
在现代导航和定位系统中,多个技术和传感器相互配合,确保高精度和实时性的定位和控制。这些技术包括 GGA、EHP、RTMC、IMU、GNSS、INS 和 RTK。本文将深入解析这些技术的作用和它们如何相互融合,以提供准确、连续的位置信息。
1. GGA:标准的定位数据格式
GGA 是 NMEA 0183 标准中的一种消息格式,主要用于表示 GPS 或 GNSS 接收器的实时定位数据。GGA 信息包含关键的定位参数,例如:
- 经纬度:表示设备的地理位置。
- 海拔高度:通常是相对于大地水准面的高度。
- 定位状态:显示当前定位是否有效。
- 卫星数量:参与定位的卫星数量,影响定位精度。
GGA 数据是 GNSS 系统生成的基础定位信息,并被其他系统(如 RTK、INS、IMU)用于进一步融合和增强。
2. EHP:增强高度精度
EHP(Enhanced Height Precision)是一种用于提高 GNSS 系统垂直定位精度的技术。GNSS(尤其是 GPS)在高度定位上往往存在较大误差,EHP 技术通过引入多频 GNSS 信号或结合其他传感器(如气压计),改善 GNSS 的高度数据。
在需要准确高度信息的场景中(如无人机飞行或建筑测量),EHP 能显著提升 GNSS 系统的高度精度。EHP 通常与 GGA 数据结合使用,确保系统在垂直方向上的精度不亚于水平定位。
3. RTMC:实时监控与控制
RTMC(Real-Time Monitoring and Control)系统用于处理和融合来自不同传感器的数据,确保实时监控和控制。RTMC 的主要功能包括:
- 数据融合:将来自 GNSS、IMU、INS、RTK 等传感器的数据进行整合和处理,提供精确的位置信息。
- 系统监控:实时监控传感器状态和定位数据,确保系统在复杂环境下的可靠性。
- 自动控制:根据实时数据进行自动化决策,如调整导航路线、速度或姿态。
在定位系统中,RTMC 系统通过整合 GGA、IMU、RTK 等数据源,确保系统始终能提供高精度的位置信息,尤其是在信号不稳定或环境复杂的情况下。
4. IMU 和 INS:惯性测量和导航系统
IMU(惯性测量单元)是一种能够测量物体加速度和角速度的传感器装置,通常包括:
- 加速度计:测量物体的线性加速度。
- 陀螺仪:测量物体的旋转角速度。
IMU 提供短期的运动信息,能够快速响应物体的运动变化。IMU 数据可以用于推算物体的姿态和速度变化,但由于其通过积分计算位置,长时间使用会产生累积误差。
INS(惯性导航系统)是基于 IMU 的导航系统,利用 IMU 提供的加速度和角速度数据进行位置、速度和姿态的计算。然而,由于 INS 存在累积误差问题,它通常与 GNSS(如 GPS)结合使用,通过 GNSS 的绝对定位来修正 INS 的累积误差,从而提供稳定的位置信息。
5. GNSS:全球导航卫星系统
GNSS(Global Navigation Satellite System)是全球范围内的卫星导航系统的总称,包含多个国家的系统,如:
- GPS(美国全球定位系统)
- GLONASS(俄罗斯全球导航卫星系统)
- Galileo(欧盟的全球导航系统)
- 北斗(中国的卫星导航系统)
GNSS 提供全球范围的定位服务,能够输出位置信息(如经纬度、高度)和时间信息。在大多数情况下,GNSS 提供的位置信息可以满足普通定位需求,但其精度可能受到诸如卫星信号质量、环境遮挡等因素影响。
6. RTK:实时动态差分定位
RTK(Real-Time Kinematic)是增强 GNSS 定位精度的关键技术之一。传统的 GNSS 系统误差通常为米级,而 RTK 通过差分修正技术,可以将定位精度提升到厘米级。
RTK 的工作原理是通过设置一个基准站来接收 GNSS 信号,并将其与流动站(用户设备)的定位数据进行差分修正。基准站会实时将修正数据发送给流动站,使其获得更高的定位精度。RTK 广泛应用于高精度要求的场景,如精确农业、无人机导航、建筑测绘等。
RTK 提供的精确位置信息通常以 GGA 格式输出,与传统的 GNSS 定位数据相比,RTK 能显著提升系统的水平和垂直定位精度。
7. 各技术的融合与协同
在实际应用中,单一的 GNSS 定位系统无法满足所有场景的高精度需求。因此,现代高精度定位系统通过将多种技术融合,达到精确和连续的定位效果。
GPS 数据融合
-
GPS + IMU/INS:GPS 提供绝对的位置信息,而 IMU 提供高频的运动信息。当 GPS 信号不稳定或丢失时(如在隧道或建筑物密集的环境中),IMU 仍能通过惯性导航推算物体的运动状态,保持位置信息的连续性。卡尔曼滤波等算法可以将 GPS 的绝对定位与 IMU 的相对运动数据结合,提供连续、稳定的位置信息。
-
GPS + RTK:RTK 是 GNSS 定位精度的增强技术,通过基准站的差分修正,RTK 将 GPS 数据的误差降低到厘米级。RTK 修正后的 GGA 数据可与 IMU 和 INS 进一步融合,确保系统在各种环境下都能提供精确的位置信息。
-
GPS + EHP:EHP 提高 GNSS 系统的高度精度,尤其在垂直方向上,EHP 技术与 GNSS 数据结合,可显著减少高度误差,确保垂直定位的可靠性。
综合融合
现代高精度定位系统通常由 GNSS、RTK、IMU、INS 和 RTMC 系统共同作用:
- GNSS 提供基础的全球定位数据。
- RTK 提供厘米级的精度提升。
- IMU/INS 提供在 GNSS 信号丢失时的短期运动推算。
- RTMC 系统整合并实时处理所有传感器数据,确保系统的连续性和精度。
应用场景
这些技术的协同作用,使其在许多高精度应用场景中发挥重要作用,包括:
- 无人机导航:要求精准的位置信息,尤其是在飞行过程中,RTK 和 IMU 的结合确保飞行器的精确定位和稳定飞行。
- 自动驾驶:RTK 和 IMU 提供车辆的实时位置信息,确保自动驾驶系统能够对车辆的运动进行精准控制。
- 建筑测绘:RTK 提供厘米级精度的定位数据,结合 GNSS 和 EHP,能够精准地测量建筑物的高度和地理位置。
总结
现代导航系统依赖于多种技术的融合来实现高精度、连续的定位。GNSS(如 GPS)提供全球范围的基础定位信息,而 RTK 提供厘米级精度的增强定位,IMU/INS 则通过惯性测量保持短期内的运动追踪。RTMC 系统负责整合所有传感器数据,确保系统在各种复杂环境下的可靠性和精度。
相关文章:

高精度定位系统中的关键技术:GGA、EHP、RTMC、IMU、GNSS、INS 和 RTK 的协同工作
文章目录 0. 概述1. GGA:标准的定位数据格式2. EHP:增强高度精度3. RTMC:实时监控与控制4. IMU 和 INS:惯性测量和导航系统5. GNSS:全球导航卫星系统6. RTK:实时动态差分定位7. 各技术的融合与协同GPS 数据…...

Spring3~~~
目录 多例 后置处理器BeanPostProcessor XML配置 通过注解 AOP与后置处理器 JdbcTemplate jdbc.properties jdbc.xml Test 具名参数 DAO 声明式事务 GoodsDao GoodsService xml 传播机制 种类 隔离级别 超时回滚 如果是普通的java项目,xml文件放…...
微服务CI/CD实践(五)Jenkins Docker 自动化构建部署Java微服务
微服务CI/CD实践系列: 微服务CI/CD实践(一)环境准备及虚拟机创建 微服务CI/CD实践(二)服务器先决准备 微服务CI/CD实践(三)Jenkins部署及环境配置 微服务CI/CD实践(四)…...

泰州高新区法院多层面强化固定资产管理
固定资产管理是法院的一项基础性工作,法院经费支出相当一部分用于固定资产的购置,为了提高固定资产使用质效,为执法办案提供坚实的保障,高新区法院积极探索科学合理的固定资产管理策略,更新管理思想,完善管…...

JDBC简介与应用:Java数据库连接的核心概念和技术
简短介绍 JDBC 及其重要性。 简短介绍 JDBC JDBC(Java Database Connectivity)是一种用于执行 SQL 语句的 Java API 并且独立于特定的数据库厂商。它允许开发者以一种标准的方式从 Java 应用程序中访问关系型数据库,这意味着一旦你掌握了 J…...

倒反天罡!这个AI风格模型可自由训练,还能批量生成同风格图像
在AIGC的新纪元中,模型已晋升为与算力并驾齐驱的生产力核心要素。也有不少用户反馈提到,如何利用神采PromeAI训练属于自己的风格模型?这需求必须安排!神采PromeAI「一致性模型」正式上线! 可自主训练风格化模型&#x…...

Stable Diffusion绘画 | ControlNet应用-Inpaint(局部重绘):更完美的重绘
Inpaint(局部重绘) 相当于小号的AI版PS,不但可以进行局部画面的修改,还可以去除背景中多余的内容,或者是四周画面内容的扩充。 预处理器说明 Inpaint_Global_Harmonious:重绘-全局融合算法,会对整个图片的画面和色调…...

电网谐波越限怎么处理
当电网中的谐波超出限值时,需要采取有效措施来处理和减少谐波,以保护电力系统的设备,确保电力质量。以下是处理电网谐波越限的主要措施: 1、谐波分析 监测与检测:使用谐波分析仪或功率质量分析仪监测谐波含量&#x…...

Redis中的AOF重写过程及其实际应用
引言 在Redis中,持久化是确保数据安全和稳定运行的关键部分。Redis提供了两种持久化方式:RDB快照和AOF(Append Only File)日志。相比RDB快照,AOF能够更频繁地保存数据变更,并且在服务器崩溃后能够更快地恢…...

JVM面试
1 黑马 1.1 什么是JVM 定义:JVM 就是java虚拟机,是运行在系统中的应用程序。它运行java的字节码文件,除了java还支持其他语言。作用:它主要作用就是实现java的代码一次编码,到处运行。实现java代码的跨平台性。功能&…...
【模板的特殊继承关系】 奇异的递归模板模式
一、奇异的递归模板模式范例 奇异的递归模板模式 ( C u r i o u s l y R e c u r r i n g T e m p l a t e P a t t e r n ) (Curiously \ Recurring \ Template \ Pattern) (Curiously Recurring Template Pattern)不是一种新技术,而是一种模板编程中使用的编程手…...
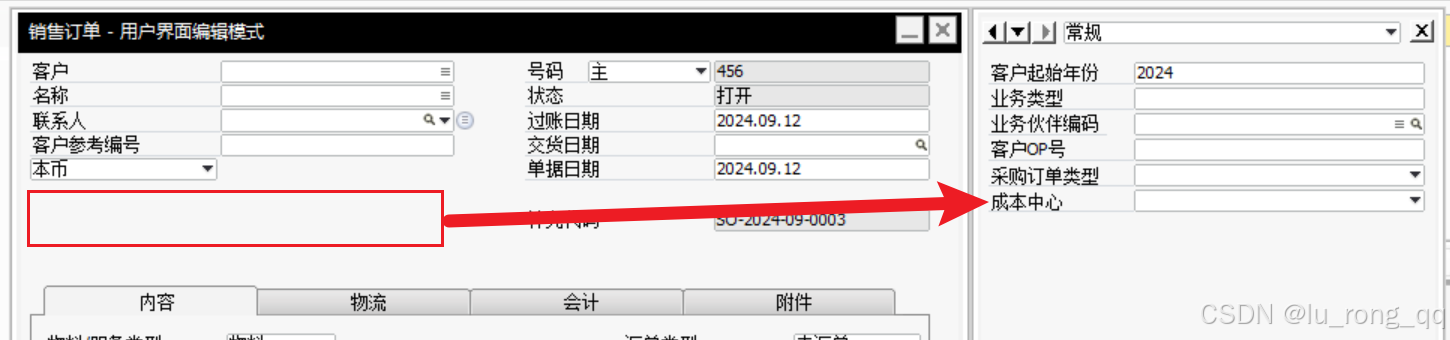
SAP B1 单据页面自定义 - 用户界面编辑字段
背景 接《SAP B1 基础实操 - 用户定义字段 (UDF)》,在设置完自定义字段后,如下图,通过打开【用户定义字段】可打开表单右侧的自定义字段页。然而再开打一页附加页面操作繁复,若是客户常用的定义字段,也可以把这些用户…...
)
MinIO【部署 02】Linux集群版本及Windows单机版、单机多目录版、分布式版(cmd启动脚本及winsw脚本分享)
Linux集群版及Windows单机版分布式版 1.Linux集群版1.1 安装启动停止1.2 将MinIO添加到服务 2.Windows2.1 官网安装2.2 本地测试2.2.1 cmd启动脚本2.2.2 winsw脚本 3.总结 1.Linux集群版 官网下载地址 https://min.io/download#/linux; 官网安装文档 https://min.i…...
手握18个大厂offer,我在大模型风口起飞
前言 在“金三银四”这一招聘旺季中,社交媒体上满是分享 offer 信息的“求助帖”。这些帖子通常只公布公司名称与薪资区间,而将具体岗位模糊化,以此作为判断岗位是否值得入职的衡量标准。 2024 年毕业的 985 硕士白丁(化名&…...

邦芒忠告:办公室聊天应避开的四个话题
职场人生风云变幻,害人之心不可有,防人之心不可无。千万别把同事当知己,无话不谈,把自己的私域圈起来当成办公室话题的禁区,轻易不让人涉足,其实是非常明智的一招,是竞争压力下的自我保护。 话题…...
)
交易型开放式指数基金(ETF)
交易型开放式指数基金(Exchange Traded Fund,简称 ETF)是一种投资工具,以下是用通俗易懂的语言对其进行的讲解: 一、基本概念 想象 ETF 是一个大篮子,里面装着很多不同的东西。在金融市场里,这…...
opencv将灰度图转为彩色图片
文章目录 背景灰度图优势opencv读取灰度图彩色转灰度算法需求 方法测试代码 背景 在图像处理中通常需要将图片转为灰度图 灰度图,也称为灰度图像或黑白图像,是一种只包含亮度信息而不包含颜色信息的图像。在灰度图中,每个像素的亮度级别通常…...

判断PDF与图片是否可以预览
一、判断图片是否可以预览 在JavaScript中,可以使用Image对象来判断一个图片URL是否可以访问。如果图片可以被加载,那么load事件会被触发;如果图片无法访问,error事件会被触发。 function checkImageAccessibility(url, callbac…...

多线程与并发区别
在Java中,多线程与并发是两个既相关又有所区别的概念。我们可以这样来理解它们: 多线程(Multi-threading): 多线程是指程序能够同时执行多个线程。每个线程都是一个独立的执行流,它们共享程序的内存空间&a…...

这个桌面日历真不错 笔记 提醒 生日记录 打卡 翻译都有 真的太方便了!
这个桌面日历真不错 笔记 提醒 生日记录 打卡 翻译都有 真的太方便了!日历产品非常的多,如何选择一个合适自己的桌面日历,这个很重要,今天小编给大家介绍这个芝麻日历,一起看下它有些什么功能,是不是你需要…...

GA/T 1400视图库实战:从零部署Easy1400平台到设备级联全流程解析
1. 初识GA/T 1400与Easy1400平台 第一次接触GA/T 1400标准时,我完全被各种专业术语绕晕了。简单来说,这是一套专门针对视频监控领域的行业标准,规定了视频图像信息在采集、传输、存储等环节的技术要求。而Easy1400就是基于这个标准开发的一套…...

5分钟免费制作专业AI翻唱:AICoverGen完整指南
5分钟免费制作专业AI翻唱:AICoverGen完整指南 【免费下载链接】AICoverGen A WebUI to create song covers with any RVC v2 trained AI voice from YouTube videos or audio files. 项目地址: https://gitcode.com/gh_mirrors/ai/AICoverGen 想让AI帮你翻唱…...

WandEnhancer技术解密:如何通过本地化增强重新定义游戏修改体验
WandEnhancer技术解密:如何通过本地化增强重新定义游戏修改体验 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 你是否曾经面对游戏修改工具…...

如何5分钟掌握N_m3u8DL-RE:流媒体下载终极解决方案
如何5分钟掌握N_m3u8DL-RE:流媒体下载终极解决方案 【免费下载链接】N_m3u8DL-RE Cross-Platform, modern and powerful stream downloader for MPD/M3U8/ISM. English/简体中文/繁體中文. 项目地址: https://gitcode.com/GitHub_Trending/nm3/N_m3u8DL-RE …...
)
从XTR文件看GNSS数据质量:如何利用Anubis报告优化你的测量方案(以GPS/BDS/Galileo为例)
从XTR文件解码GNSS数据质量:实战分析与优化策略 在GNSS测量领域,数据质量直接决定了最终定位结果的可靠性。XTR文件作为Anubis软件生成的质量报告,包含了大量反映GNSS观测质量的指标参数。对于有经验的工程师而言,这些数字不仅仅是…...

SyntaxUI:基于原子设计与Web组件的现代UI库开发实践
1. 项目概述:一个为开发者而生的现代UI组件库 如果你是一名前端开发者,或者正在构建一个需要用户界面的应用,那么你肯定经历过这样的场景:为了一个按钮的样式、一个表格的交互,或者一个模态框的动画,反复在…...

Legacy-iOS-Kit完整指南:如何让老旧iPhone和iPad重获新生
Legacy-iOS-Kit完整指南:如何让老旧iPhone和iPad重获新生 【免费下载链接】Legacy-iOS-Kit An all-in-one tool to restore/downgrade, save SHSH blobs, jailbreak legacy iOS devices, and more 项目地址: https://gitcode.com/gh_mirrors/le/Legacy-iOS-Kit …...

从零解析开源API网关fiGate:架构设计与生产实践
1. 项目概述:从零解析一个开源API网关最近在梳理团队内部微服务治理方案时,我又重新审视了市面上各类API网关的实现。除了大家耳熟能详的Kong、APISIX、Tyk这些“明星产品”,其实在GitHub的海洋里,还藏着不少设计精巧、思路独特的…...

OpenAgents开源框架:模块化AI智能体开发实战指南
1. 项目概述:一个面向未来的智能体开发框架最近在AI智能体这个圈子里,OpenAgents这个项目讨论度挺高的。简单来说,它不是一个单一的AI应用,而是一个旨在降低智能体开发门槛、加速智能体应用落地的开源框架。你可以把它想象成一个“…...

ARM CoreSight SoC-400调试系统勘误解析与解决方案
1. CoreSight SoC-400调试系统深度解析在嵌入式系统开发领域,调试与跟踪技术是确保系统可靠性的关键环节。作为ARM架构下的核心调试解决方案,CoreSight SoC-400系列为开发者提供了强大的硬件支持。今天我将结合多年实战经验,深入剖析这个系统…...