ros2教程(一):使用python和C++发布摄像头原始图像和压缩图像
1. 使用python发布图像
在ROS 2中,可以通过使用rclpy库来发布压缩图像和原始图像。发布原始图像可以使用sensor_msgs.msg.Image消息类型,压缩图像则使用sensor_msgs.msg.CompressedImage消息类型。
#!/usr/bin/env python3# function: usbcam publish raw image or compressed image
# author: xxx
# Date: 2024.06.29
# version: v0.1import rclpy
from rclpy.node import Node
import cv2
from cv_bridge import CvBridge, CvBridgeError
import numpy as np
import time
from sensor_msgs.msg import Image, CompressedImageclass NodePublisher(Node):def __init__(self,name):super().__init__(name)self.get_logger().info("usb cam node created!")def main(args=None):#image sizeheight = 480width = 640#capture frequencyfrequency = 10#compressed flagcompressed_flag = True#image compressed quality %img_quality = 50 #usb cam device idcapture = cv2.VideoCapture(0)#ubuntu: check /dev/video*capture.set(cv2.CAP_PROP_FRAME_WIDTH, width) capture.set(cv2.CAP_PROP_FRAME_HEIGHT, height)capture.set(cv2.CAP_PROP_FOURCC, cv2.VideoWriter_fourcc('M', 'J', 'P', 'G')) # init rclpy noderclpy.init()node = NodePublisher("usb_cam_image") if compressed_flag: # create compressed image topicsimage_compressed_pub = node.create_publisher(CompressedImage, "/usb_cam_image/compressed", 10) else: # create raw image topicsimage_pub = node.create_publisher(Image, "/usb_cam_image", 10) # create compressed image messagemsg_compressed_img = CompressedImage()msg_compressed_img.format = "jpeg"bridge = CvBridge() n = 30 // frequencycount = 0while True: ret, frame = capture.read() if count % n == 0:np_frame = np.array(cv2.flip(frame, 1)) if compressed_flag:_, compressed_image = cv2.imencode('.jpg', np_frame, [int(cv2.IMWRITE_JPEG_QUALITY), img_quality])msg_compressed_img.data = compressed_image.tobytes() image_compressed_pub.publish(msg_compressed_img) else: img_raw = bridge.cv2_to_imgmsg(np_frame, encoding="bgr8") image_pub.publish(img_raw) count = 0count += 1相应的setup.py文件如下:
from setuptools import setuppackage_name = 'py_usb_cam_record'setup(name=package_name,version='0.0.0',packages=[package_name],data_files=[('share/ament_index/resource_index/packages',['resource/' + package_name]),('share/' + package_name, ['package.xml']),],install_requires=['setuptools'],zip_safe=True,maintainer='xxx',maintainer_email='xxx@gmail.com',description='TODO: Package description',license='TODO: License declaration',tests_require=['pytest'],entry_points={'console_scripts': ['py_usb_cam_record = py_usb_cam_record.py_usb_cam_record:main'],},
)
2. 使用C++发布图像
在ROS 2中,使用C++发布原始图像和压缩图像可以通过image_transport库来实现,原始图像使用sensor_msgs::msg::Image,而压缩图像可以通过image_transport::Publisher发布为sensor_msgs::msg::CompressedImage。
使用C++发布原始图像
/*=================================================* function: usbcam publish raw image or compressed image
* Author: xxx
* Date: 2024.06.29===================================================*/#include "rclcpp/rclcpp.hpp"
#include "sensor_msgs/msg/image.hpp"
#include "opencv2/opencv.hpp"
#include "cv_bridge/cv_bridge.h"using namespace std::chrono_literals;class CameraPublisher : public rclcpp::Node {
public:CameraPublisher(): Node("camera_publisher"), count_(0) {publisher_ = this->create_publisher<sensor_msgs::msg::Image>("camera/image", 10);timer_ = this->create_wall_timer(100ms, std::bind(&CameraPublisher::publishImage, this));cap_ = cv::VideoCapture(0); // Open default cameraprintf("record raw image!\n");if (!cap_.isOpened()) {RCLCPP_ERROR(this->get_logger(), "Failed to open camera");}}private:void publishImage() {cv::Mat frame;cap_ >> frame; // Capture a frame from the cameraif (frame.empty()) {RCLCPP_ERROR(this->get_logger(), "Failed to capture frame");return;}cv::Mat resized_frame;cv::resize(frame, resized_frame, cv::Size(640, 480), cv::INTER_LINEAR);auto msg = cv_bridge::CvImage(std_msgs::msg::Header(), "bgr8", resized_frame).toImageMsg();publisher_->publish(*msg);count_++;printf("record raw image: %d\r", count_);}rclcpp::Publisher<sensor_msgs::msg::Image>::SharedPtr publisher_;rclcpp::TimerBase::SharedPtr timer_;cv::VideoCapture cap_;int count_;
};int main(int argc, char **argv) {rclcpp::init(argc, argv);auto node = std::make_shared<CameraPublisher>();rclcpp::spin(node);rclcpp::shutdown();return 0;
}使用C++发布压缩图像
/*=================================================* function: usbcam publish raw image or compressed image
* Author: xxx
* Date: 2024.06.29===================================================*/// ros2 run image_transport republish compressed in/compressed:=compressed_image raw out:=image_raw#include "rclcpp/rclcpp.hpp"
#include "sensor_msgs/msg/compressed_image.hpp"
#include "opencv2/opencv.hpp"
#include "cv_bridge/cv_bridge.h"using namespace std::chrono_literals;class CameraPublisher : public rclcpp::Node {
public:CameraPublisher(): Node("camera_publisher"), count_(0) {publisher_ = this->create_publisher<sensor_msgs::msg::CompressedImage>("compressed_image", 10); timer_ = this->create_wall_timer(100ms, std::bind(&CameraPublisher::publishImage, this));cap_ = cv::VideoCapture(0); // Open default cameraprintf("record compressed image!\n");if (!cap_.isOpened()) {RCLCPP_ERROR(this->get_logger(), "Failed to open camera");}}private:void publishImage() {cv::Mat frame;cap_ >> frame; // Capture a frame from the cameraif (frame.empty()) {RCLCPP_ERROR(this->get_logger(), "Failed to capture frame");return;}cv::Mat resized_frame;cv::resize(frame, resized_frame, cv::Size(640, 480), cv::INTER_LINEAR);std::vector<uchar> buf;cv::imencode(".jpg", resized_frame, buf, {cv::IMWRITE_JPEG_QUALITY, 80}); // Adjust JPEG quality (0-100 scale)sensor_msgs::msg::CompressedImage msg;msg.format = "jpeg";msg.data = buf;publisher_->publish(msg);count_++;printf("record compressed image: %d\r", count_);}rclcpp::Publisher<sensor_msgs::msg::CompressedImage>::SharedPtr publisher_;rclcpp::TimerBase::SharedPtr timer_;cv::VideoCapture cap_;int count_;
};int main(int argc, char **argv) {rclcpp::init(argc, argv);auto node = std::make_shared<CameraPublisher>();rclcpp::spin(node);rclcpp::shutdown();return 0;
}CMakeLists.txt文件内容如下:
cmake_minimum_required(VERSION 3.5)
project(usb_cam_record)# Default to C++14
if(NOT CMAKE_CXX_STANDARD)set(CMAKE_CXX_STANDARD 14)
endif()if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")add_compile_options(-Wall -Wextra -Wpedantic)
endif()# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(image_transport REQUIRED)
find_package(cv_bridge REQUIRED) # If using OpenCV for image handling
find_package(OpenCV REQUIRED)#include_directories(${OpenCV_INCLUDE_DIRS})add_executable(usb_cam_record_raw_node src/usb_cam_record_raw.cpp)
add_executable(usb_cam_record_compressed_node src/usb_cam_record_compressed.cpp)ament_target_dependencies(usb_cam_record_raw_noderclcppsensor_msgscv_bridgeimage_transportOpenCV
) ament_target_dependencies(usb_cam_record_compressed_noderclcppsensor_msgscv_bridgeimage_transportOpenCV
) install(TARGETS usb_cam_record_raw_node usb_cam_record_compressed_nodeDESTINATION lib/${PROJECT_NAME})if(BUILD_TESTING)find_package(ament_lint_auto REQUIRED)# the following line skips the linter which checks for copyrights# uncomment the line when a copyright and license is not present in all source files#set(ament_cmake_copyright_FOUND TRUE)# the following line skips cpplint (only works in a git repo)# uncomment the line when this package is not in a git repo#set(ament_cmake_cpplint_FOUND TRUE)ament_lint_auto_find_test_dependencies()
endif()ament_package()package.xml的文件配置如下:
<package format="3">
<name>usb_cam_record</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="xxx@gmail.com">xxx</maintainer>
<license>TODO: License declaration</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<build_depend>rclcpp</build_depend>
<exec_depend>rclcpp</exec_depend>
<build_depend>sensor_msgs</build_depend>
<exec_depend>sensor_msgs</exec_depend>
<build_depend>image_transport</build_depend>
<exec_depend>image_transport</exec_depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>相关文章:
:使用python和C++发布摄像头原始图像和压缩图像)
ros2教程(一):使用python和C++发布摄像头原始图像和压缩图像
1. 使用python发布图像 在ROS 2中,可以通过使用rclpy库来发布压缩图像和原始图像。发布原始图像可以使用sensor_msgs.msg.Image消息类型,压缩图像则使用sensor_msgs.msg.CompressedImage消息类型。 #!/usr/bin/env python3# function: usbcam publish r…...
【自动化测试】UI自动化的分类、如何选择合适的自动化测试工具以及其中appium的设计理念、引擎和引擎如何工作
引言 UI自动化测试主要针对软件的用户界面进行测试,以确保用户界面元素的交互和功能符合预期 文章目录 引言一、UI自动化的分类1.1 基于代码的自动化测试1.2 基于录制/回放的自动化测试1.3 基于框架的自动化测试1.4 按测试对象分类1.5 按测试层次分类1.6 按测试执行…...

深入理解Python中的“_,”:一个实用的语法特性
在Python编程中,你可能经常会看到一个特殊的标识符“_”。这个符号在Python中有多种用途,其具体含义依上下文而定。本文将探讨其中一种常见用法——作为一个临时性的占位符——并解释它在实际编程中的实用性和应用场景。 1. “_”作为占位符 在Python中…...

Mac清理其他文件:释放存储空间的高效指南
每个Mac用户都可能遇到存储空间不足的问题,尤其是当“其他”文件积累到一定体积时。在Mac上,“其他”文件通常包括各种系统文件、缓存、文档以及不被归类为应用程序、照片、电影或音乐的其他类型的文件。这些文件往往不易被注意,但逐渐占用了…...

html+css+js网页设计 旅游 龙门石窟4个页面
htmlcssjs网页设计 旅游 龙门石窟4个页面 网页作品代码简单,可使用任意HTML辑软件(如:Dreamweaver、HBuilder、Vscode 、Sublime 、Webstorm、Text 、Notepad 等任意html编辑软件进行运行及修改编辑等操作)。 获取源码 1&#…...
CISSP一站通关
依托轻速云维护了一个专注于CISSP备考通关的在线学习平台,提供知识串讲视频,配合大量针对性的习题和重难点习题解析,帮助备考学习者高效学习和巩固知识点。已经帮助100考友顺利通过考试。 知识串讲视频是我主讲的5天直播课程的录屏࿰…...
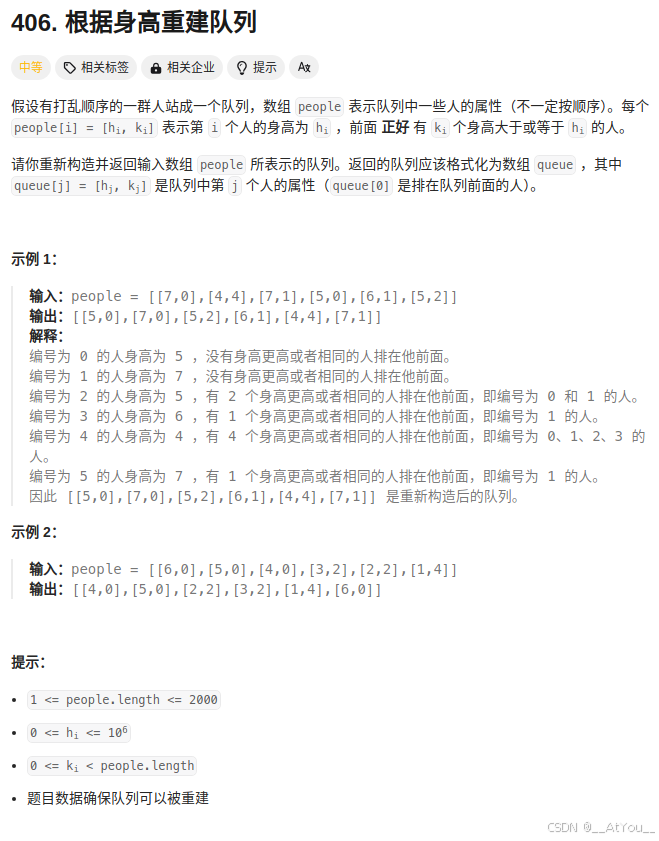
Golang | Leetcode Golang题解之第406题根据身高重建队列
题目: 题解: func reconstructQueue(people [][]int) (ans [][]int) {sort.Slice(people, func(i, j int) bool {a, b : people[i], people[j]return a[0] > b[0] || a[0] b[0] && a[1] < b[1]})for _, person : range people {idx : pe…...
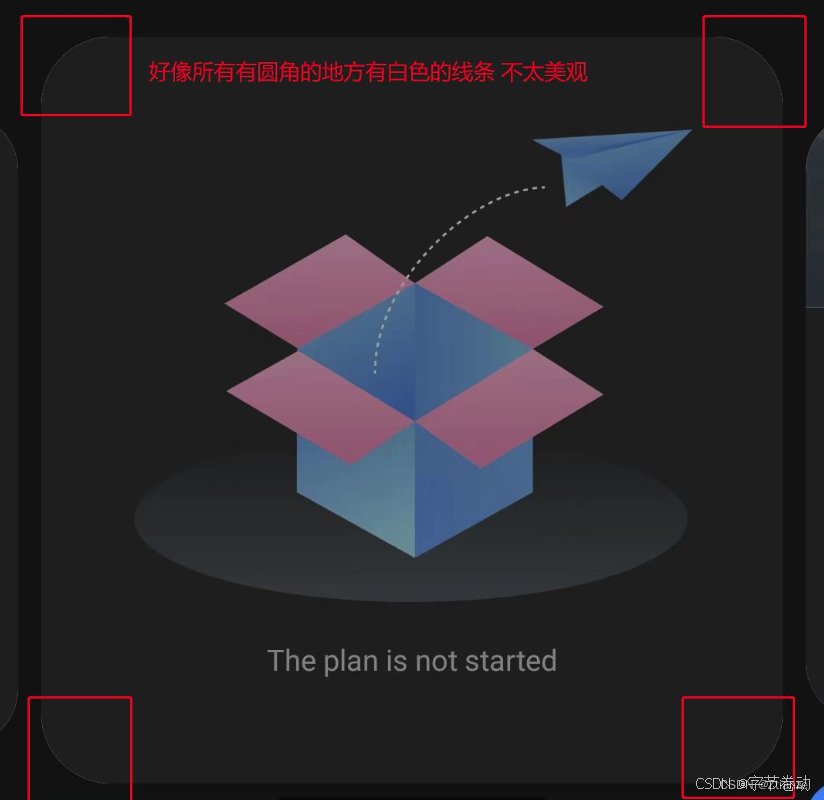
【我的Android进阶之旅】解决CardView四个圆角有白边的问题
文章目录 一、问题描述二、分析CardView出现白边的原因三、如何解决这个问题?3.1 如何修复?3.2 为什么这样可以修复?3.3 示例代码3.4 总结一、问题描述 在实现一个RecycleView的Item时候,样式需要用到卡片式效果,于是想到用CardView来实现,但是最终发现运行出来的效果,…...
学习笔记JVM篇(四)
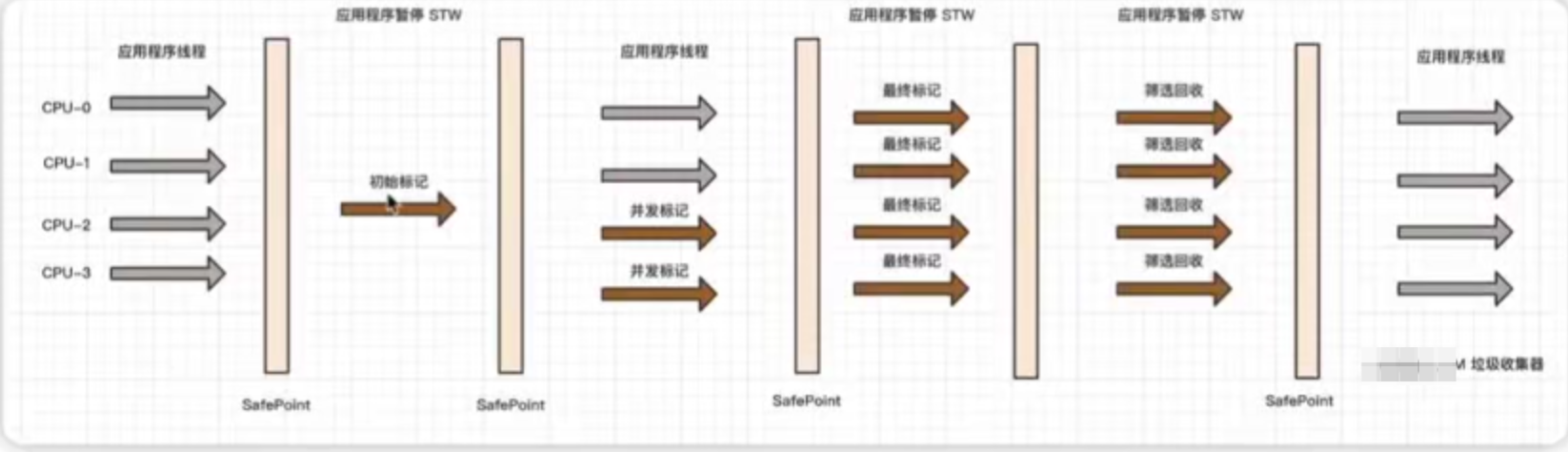
垃圾回收器 说完垃圾回收算法接下来就需要对应的垃圾回收器去回垃圾回收器。接下来介绍几种垃圾回收器 1、Serial 串行回收器,是单线程版本,暂停所有的应用。在单CPU的情况下效率是很高的,因为不涉及线程的上下文切换。适用于小型程序和客…...

828 华为云征文|华为 Flexus 云服务器搭建萤火商城 2.0
《828 华为云征文|华为 Flexus 云服务器搭建萤火商城 2.0》 在 2024 年 9 月 14 日这个特别的日子,我着手利用华为 Flexus 云服务器搭建轻量级、高性能、前后端分离的电商系统萤火商城 2.0,开启了一段充满挑战与惊喜的旅程。 华为 Flexus 云服…...

centos7安装MySQL5.7.44
下载压缩文件 命令: #放到在/usr/local目录下 cd /usr/local #上传命令选择安装包 rz #解压缩包 tar -zxvf mysql-5.7.44-linux-glibc2.12-x86_64.tar.gz #给包重命名为mysql mv mysql-5.7.44-linux-glibc2.12-x86_64 mysql #查看mysql目录下有什么东西 [rootlocal…...

HTTP 请求处理的完整流程到Servlet流程图
HTTP 请求处理的完整流程。从 TCP 三次握手开始,一直到 Servlet 处理请求并返回响应。 首先,让我解释一下 response.setContentType("text/html;charsetUTF-8"); 这行代码: 这行代码设置了 HTTP 响应的 Content-Type 头。它告诉浏…...

spingboot中创建简单的WebSocket服务和使用OKHttp创建socket客户端接收数据
背景 springboot 中使用okhttp3创建webSocket服务端 server1 和客户端 client1,客户端clinet1调用server1用于发送图片,创建客户端client2接收此图片. 在Spring Boot中使用OkHttp3创建WebSocket服务端和客户端,涉及到两个不同的操作ÿ…...

Redis入门2
在java中操作Redis Redis的Java客户端 Redis 的 Java 客户端很多,常用的几种: Jedis Lettuce Spring Data Redis Spring Data Redis 是 Spring 的一部分,对 Redis 底层开发包进行了高度封装。 在 Spring 项目中,可以使用Spring Data R…...

嵌入式Linux:信号是什么?
目录 1、信号的来源 2、信号的处理方式 3、信号的异步性 4、信号编号 信号是Linux系统中用于通知进程事件发生的一种机制,可以将其视为一种软件中断。信号类似于硬件中断,能够打断进程当前的执行流程,从而实现对中断机制的一种软件层面的…...

教你搭建一个wifi贴系统
大家好,我是鲸天科技千千,大家都知道我是做小程序开发的,平时会给大家分享一些互联网相关的创业项目,感兴趣的可以跟我关注一下。 搭建一个首先就是要搭建一个自己的wifi贴小程序,我们自己的工作就是把这个小程序推广…...

C#中的LINQ语句
LINQ(Language Integrated Query)是 .NET Framework 中的一个功能强大的查询语言,它允许开发者使用类似 SQL 的语法来查询和操作数据。在 C# 中,LINQ 可以用于查询数组、列表、集合、XML 文档、关系数据库等。以下是一些常见的 LI…...
)
【C++】——string(模拟实现)
文章目录 string类构造string类拷贝构造string类析构string类运算符重载string类部分常用接口的模拟实现 这篇博客中构造、拷贝构造、析构、还有一些短小频繁调用的函数就不用做函数和定义分离,因为在类中,这种函数会默认是内联函数 string类构造 构造函…...

c++20 std::format 格式化说明
在标头<format>定义 ()功能很强大,它把字符串当成一个模板,通过传入的参数进行格式化,并且使用大括号‘{}’作为特殊字符代替‘%’。 1、基本用法 (1)不带编号,即“{}”(2)带…...

HTB-Unified(log4j2漏洞、MongoDb替换管理员密码)
前言 各位师傅大家好,我是qmx_07,今天给大家讲解Unified靶机 渗透过程 信息搜集 服务器开放了SSH服务,HTTP服务 访问网站 验证log4j2漏洞 8443端口:UniFi 网络 ,访问查询 是否有Nday漏洞利用 可以观察到UniFi的版…...

Gazebo 11 插件开发避坑实录:从 ModelPlugin 报错到 WorldPlugin 的平滑迁移
Gazebo 11插件开发深度指南:从兼容性陷阱到高效迁移策略 当Gazebo从9版本迭代到11版本时,许多开发者突然发现原本运行良好的插件代码开始报出各种奇怪的错误。这就像你熟悉的咖啡店突然换了所有设备——虽然咖啡豆还是那些咖啡豆,但制作流程…...

物联网新手避坑指南:用MQTT.fx 1.7.1连接OneNET平台,从数据上报到命令下发的完整流程
物联网开发实战:MQTT.fx与OneNET平台深度对接指南 第一次打开MQTT.fx时,面对密密麻麻的配置项和晦涩的协议术语,大多数物联网初学者都会感到无从下手。这就像刚拿到驾照就让你开F1赛车——工具很强大,但学习曲线陡峭。本文将带你用…...

Android内存泄漏排查实战:如何用dma_buf揪出Low Memory的元凶
Android内存泄漏排查实战:如何用dma_buf揪出Low Memory的元凶 当你的Android设备开始频繁弹出"内存不足"的警告,甚至出现应用闪退、系统卡顿等问题时,作为开发者需要立即警觉——这很可能不是简单的内存紧张,而是潜伏着…...

2026最新大模型学习路线图!小白转行AI,这可能是你最好的起点!
大模型目前在可以说正处于一种“炙手可热”的状态,吸引了很多人的关注和兴趣,也有很多新人小白想要学习大模型技术,转战AI领域,以适应未来的大趋势,寻求更有前景的发展!2026最新大模型学习路线 一个明确的学…...

iSDIO库:嵌入式系统中FlashAir Wi-Fi卡的SDIO协议栈
1. iSDIO库概述:面向TOSHIBA FlashAir的嵌入式SDIO协议栈iSDIO(intelligent SDIO)库是一个专为东芝(TOSHIBA)FlashAir系列Wi-Fi SD卡设计的轻量级嵌入式驱动与通信中间件。该库并非通用SDIO主机控制器驱动,…...

【C】static
static1、修饰局部变量:使其变为静态变量,这个局部变量在函数执行完成后不会被释放,而是继续保留在内存里。2、修饰全局变量:使其只在本文件内部有效,在其他文件不可用。3、修饰函数:使函数只能在本文件中使…...

8年Java后端转型AI,踩坑一年总结:后端工程力是大模型应用开发的护城河!涨薪30%的秘诀在此
做了八年Java后端,去年咬牙转型AI应用开发。这一年踩过坑、加过班、也被面试官问倒过。但回头看,这条路选对了——薪资涨了30%,职业空间也打开了。我必须告诉那些还在犹豫要不要从后端跳出来的同行——现在的AI应用开发社招,确实是…...
)
手把手教你封装OCCT_Window:一个可复用的Qt Widget组件(附完整源码)
手把手教你封装OCCT_Window:打造高复用Qt 3D显示组件 在工业软件和CAD应用开发中,将Open CASCADE的3D显示能力无缝集成到Qt界面是一个常见需求。传统做法往往需要开发者深入理解OCCT的窗口系统与Qt的交互机制,导致大量重复劳动。本文将展示如…...

bilibili-parse:让B站视频解析变得简单高效的PHP工具
bilibili-parse:让B站视频解析变得简单高效的PHP工具 【免费下载链接】bilibili-parse bilibili Video API 项目地址: https://gitcode.com/gh_mirrors/bi/bilibili-parse 价值定位:为什么选择bilibili-parse 当你需要在自己的项目中集成B站视频…...

深度解析bilibili-linux:Linux平台上的专业级B站客户端完整指南
深度解析bilibili-linux:Linux平台上的专业级B站客户端完整指南 【免费下载链接】bilibili-linux 基于哔哩哔哩官方客户端移植的Linux版本 支持漫游 项目地址: https://gitcode.com/gh_mirrors/bi/bilibili-linux bilibili-linux是一款专为Linux系统设计的开…...