Mitsuba 渲染基础
Mitsuba 渲染基础
- 0. Abstract
- 1. 安装 Mitsuba2
- 1.1 下载 Mitsuba2 源码
- 1.2 选择后端 (variants)
- 1.3 编译
- 2. [Mitsuba2PointCloudRenderer](https://github.com/tolgabirdal/Mitsuba2PointCloudRenderer)
- 2.1 Mitsuba2 渲染 XML
- 2.2 Scene 场景的 XML 文件格式
- 2.2.1 `chair.npy` to XML
- 2.2.2 Scene XML 文件解析
- 3. Mitsuba2 小结
- 4. Mitsuba3
- 4.1 Mitsuba3 安装
- 4.2 Quickstart
- 4.2.1 Dr.Jit Quickstart (Similarity with NumPy)
- 4.2.2 Mitsuba3 Quickstart
0. Abstract
最近看到一些点云相关的工作, 他们在文章中展示的点云结果很好看, 类似这样:

但自己用 matplotlib 画的结果却很丑, 发邮件问作者才知道他用了一个渲染工具 Mitsuba2PointCloudRenderer. 它用到了渲染软件 Mitsuba2, 执行:
python render_mitsuba2_pc.py chair.npy
就能渲染点云, 过程是这样的:
- generates an XML file, which describes a 3D scene in the format used by Mitsuba;
- calls Mitsuba2 to render the point cloud into an EXR file;
- processes the EXR into a jpg file.
- iterates for multiple point clouds present in the tensor (.npy)
想要了解其到底干了什么, 如何自定义渲染配置? 就进入这个仓库好好看一看.
1. 安装 Mitsuba2
那么自然要先安装 Mitsuba2, 比较麻烦, 似乎要根据 官方文档 从源码编译安装, 那就照说明做.
1.1 下载 Mitsuba2 源码
git clone --recursive https://github.com/mitsuba-renderer/mitsuba2
Mitsuba2 依赖了很多其他库, --recursive 可以保证同时将其依赖的库一起 clone 下来.
1.2 选择后端 (variants)
克隆好后, 还要了解 Mitsuba2 的后端. 它是一个重定向系统, 前端的调用接口大多是一致的, 实际的后端执行者有很多版本, 各后端版本命名规则:

上面是一个后端的例子:
- Computational Backend: 指计算设备及计算方式. 如果选择在 CPU 上计算, 可以是
scalar, 对应标量计算方式, 也可以是packet, 对应并行计算方式; 如果选择在 GPU 上计算, 有gpu和gpu_autodiff可选;
大概意思是, 渲染过程需要发出很多光线,
scalar后端每次只能计算一个光路径, 而packet每次并行计算一组,gpu则具有更高的并行性. 下图展示了scalar和packet的区别.

- Color Representation: 指颜色的表示方式, 有
mono,rgb,spectral. 其中,mono是单色的意思, 可能是灰白; 光谱表示可能有更加丰富的颜色; 需要注意的是, 在spectral模式下, 默认输出的依然是 RGB 图片, 输入仅包含 RGB 颜色信息的 scene, 也能渲染; - Polarization: 略;
- Precision: 计算时使用的浮点精度, 默认是单精度, 带
_double则表示使用双精度; 注意, GPU 不支持双精度.
全部的变体列表在 Choosing Variants 查看.
了解了 Mitsuba2 的后端后, 可在代码库的根目录配置你需要的后端类型:
cd <..mitsuba repository..>
cp resources/mitsuba.conf.template mitsuba.conf
打开 mitsuba.conf, 找到(大约在70行):
"enabled": [# The "scalar_rgb" variant *must* be included at the moment."scalar_rgb","scalar_spectral"
],
这是默认启用的两个, 你可以向这个列表中添加需要的后端.
注意:
scalar_rgb必须要有, 因为很多基础功能是基于它的; 尽量少添加, 因为后端越多, 编译时间越长, 占用空间越大.
设置默认后端: (如果使用 Mitsuba2 时未指定后端, 则使用默认的后端)
# If mitsuba is launched without any specific mode parameter,
# the configuration below will be used by default
"default": "scalar_spectral"
1.3 编译
不同系统编译要求及命令不同(Python>=3.6). Windows 下需要安装 Visual Studio, 果断放弃; Linux 下也需要一堆依赖:
# Install recent versions build tools, including Clang and libc++ (Clang's C++ library)
sudo apt install -y clang-9 libc++-9-dev libc++abi-9-dev cmake ninja-build
# Install libraries for image I/O and the graphical user interface
sudo apt install -y libz-dev libpng-dev libjpeg-dev libxrandr-dev libxinerama-dev libxcursor-dev
# Install required Python packages
sudo apt install -y python3-dev python3-distutils python3-setuptools# >>>>>>>>>>>>> 可选 >>>>>>>>>>>>>>>>
# For running tests
sudo apt install -y python3-pytest python3-pytest-xdist python3-numpy
# For generating the documentation
sudo apt install -y python3-sphinx python3-guzzle-sphinx-theme python3-sphinxcontrib.bibtex
文档说编译器要选 clang, 因为用 gcc 会有各种问题.
export CC=clang-9
export CXX=clang++-9
如果已经有其他版本的 clang, 可以调整后缀.
然后, 进入代码根目录开始编译:
# Create a directory where build products are stored
mkdir build
cd build
cmake -GNinja ..
ninja
编译好之后, build 目录下会有一个叫 dist 的文件夹, 里面就是编译好的 Mitsuba2:

其中 mitsuba 就是可执行文件.
注意, 如果选择了 GPU 后端, 需要有 CUDA 和 OptiX 来编译.

2. Mitsuba2PointCloudRenderer
在 Abstract 中, 已经说明这个库的步骤是先生成 .xml scene 文件, 然后调用 Mitsuba2 进行渲染. 为了急于验证编译的 Mitsuba2 好不好使, 先讲述渲染部分.
2.1 Mitsuba2 渲染 XML
编译之后就可以使用了, 在这之前, 需要把 render_mitsuba2_pc.py 中的 Mitsuba2 路径修改一下:
...
# mitsuba exectuable, 改成自己的 Mitsuba2 位置
PATH_TO_MITSUBA2 = "/home/tolga/Codes/mitsuba2/build/dist/mitsuba"
...
然后执行:
python render_mitsuba2_pc.py chair.npy
就可以得到渲染后的点云图片.
Mitsuba2 的调用是通过 python 的 subprocess 包执行 shell 命令来实现的:
...
subprocess.run([PATH_TO_MITSUBA2, xmlFile])
...
这里的 xmlFile 是 Python 代码根据 numpy 数组生成的表示 scene 的 xml 文件. 此行代码相当于 shell 命令:
/home/tolga/Codes/mitsuba2/build/dist/mitsuba chair_scene.xml
由 1.2 节可知, 默认使用的是 scalar_spectral, 应该是比较慢的, 渲染这个椅子大约花费了 42s. 那就试一试 GPU 咋样:
subprocess.run([PATH_TO_MITSUBA2, xmlFile, '-m', 'gpu_rgb'])
出了意外:
2024-09-20 20:15:36 INFO main [optix_api.cpp:56] Dynamic loading of the Optix library ..
Caught a critical exception: [optix_api.cpp:144] optix_initialize(): libnvoptix.so.1 could not be loaded.
试试手动渲染也是一样的错误. 后来尝试各种办法均无法解决, 可能原因是我使用的环境是 docker 服务器, 管不了 NVIDIA 驱动的事.
GPU 不行就试试 packet:
subprocess.run([PATH_TO_MITSUBA2, xmlFile, '-m', 'packet_rgb'])
好像并没有变快, 足足花了 49s. 可能还有其他参数未设置吧, 比如并行数量. 后来发现是因为 rgb, 之前是 spectral, scalar_rgb 足足花了 1.24m. 可见还是加速了的.
2.2 Scene 场景的 XML 文件格式
了解 scene 文件的格式才能自由调整渲染的各种属性, 官方文档中的 提供了详细说明, 但本博文就只简单了解一下根据 chair.npy 生成的 XML 文件.
2.2.1 chair.npy to XML
阅读 render_mitsuba2_pc.py, 可以发现, XML 文件的生成是三部分组成的: head, shape, tail, 具体的后面再说, 现在看看点云是如何转化为 XML 文件的.
最主要的是中间部分:
xml_ball_segment = \"""<shape type="sphere"><float name="radius" value="0.015"/><transform name="toWorld"><translate x="{}" y="{}" z="{}"/></transform><bsdf type="diffuse"><rgb name="reflectance" value="{},{},{}"/></bsdf></shape>
"""
xml_segments = [xml_head]
for i in range(pcl.shape[0]):color = colormap(pcl[i, 0] + 0.5, pcl[i, 1] + 0.5, pcl[i, 2] + 0.5 - 0.0125)xml_segments.append(xml_ball_segment.format(pcl[i, 0], pcl[i, 1], pcl[i, 2], *color))
xml_segments.append(xml_tail)
通过一个 for 循环把点云 pcl 中的点映射至颜色 color (根据点位置), 然后点和颜色一起送入 xml_ball_segment 的格式化占位符中, 分别对应 shape -> transform -> translate 和 shape -> bsdf -> rgb.
2.2.2 Scene XML 文件解析
已经了解了点云如何转化为 XML 文件, 可其中的标签都代表什么还不清楚, 查阅官方文档既漫长又枯燥, 直接拿得到的 XML 文件问一问通义千问吧, 现以注释的形式记录:
<scene version="0.6.0"><!--积分器是用来计算光照传输方程的方法, 模拟不同的光照效果;path: 这里指定的是路径追踪积分器(Path Tracer), 模拟光线在场景中的随机行走(即光线的“路径”), 从而得到更加真实的光影效果;maxDepth: 路径的最大深度, 当 maxDepth 设置为 -1 时, 表示没有最大深度限制, 即允许光线无限反弹.--><integrator type="path"><integer name="maxDepth" value="-1"/></integrator><!-- 定义了一个相机(传感器)sensor, 它用于捕捉场景并生成图像; --><sensor type="perspective"> <!-- “透视”相机, 它将场景中的物体从三维空间映射到二维图像上, 以模拟人眼观察的视觉效果. --><float name="farClip" value="100"/> <!-- 远裁剪平面的距离为 100 单位长度, 任何在这个距离之外的对象都不会被绘制. --><float name="nearClip" value="0.1"/> <!-- 近裁剪平面的距离为 0.1 单位长度. 任何在这个距离之内的对象也不会被绘制. --><!--相机的位置和方向:origin="3,3,3": 相机的位置是在 (3, 3, 3) 坐标处.target="0,0,0": 相机对准的点是在原点 (0, 0, 0).up="0,0,1": 向上的方向是沿着 Z 轴正方向.--><transform name="toWorld"><lookat origin="3,3,3" target="0,0,0" up="0,0,1"/></transform><float name="fov" value="25"/> <!-- 相机的视场角(Field of View)为 25 度. 视场角决定了相机能看到的范围大小. --><!--独立采样器(Sampler), 用于确定渲染过程中像素的样本分布sampleCount: 每个像素的采样数量为 256. 更多的样本可以减少噪点, 但也增加了渲染时间.--><sampler type="independent"><integer name="sampleCount" value="256"/></sampler><!-- 渲染输出的胶片(Film)类型为 HDR(高动态范围)--><film type="hdrfilm"><integer name="width" value="1920"/> <!-- 图像宽度为1920像素 --><integer name="height" value="1080"/> <!-- 图像高度为1080像素 --><rfilter type="gaussian"/> <!-- 使用高斯滤波器进行像素重建, 以减少输出图像的噪声 --></film></sensor><!-- 材料的表面反射模型(BSDF) --><bsdf type="roughplastic" id="surfaceMaterial"> <!-- 粗糙塑料材质的 BSDF(双向散射分布函数) --><string name="distribution" value="ggx"/><float name="alpha" value="0.05"/> <!-- 微表面模型的粗糙度参数alpha为0.05. 该值越小, 表面看起来越光滑;越大, 则越粗糙. --><float name="intIOR" value="1.46"/> <!-- 折射率影响物体的透明度和折射效果. 对于塑料而言, 1.46是一个合理的折射率值 --><!--材料的漫反射颜色, 默认情况下是白色(1,1,1), 这里的值覆盖了默认的 0.5, 使得材料看起来更加白色. 漫反射颜色影响物体在没有直接光照情况下的颜色表现. --><rgb name="diffuseReflectance" value="1,1,1"/> <!-- default 0.5 --></bsdf><shape type="sphere"><float name="radius" value="0.015"/><transform name="toWorld"><translate x="-0.28334808349609375" y="0.3507939875125885" z="-0.43566787242889404"/></transform><bsdf type="diffuse"><rgb name="reflectance" value="0.24634252336480672,0.9673892625993827,0.05893535263050671"/></bsdf></shape><!-- ... 很多 shape ... --><shape type="rectangle"><ref name="bsdf" id="surfaceMaterial"/> <!-- 引用前面的 bsdf, 以说明本长方形的表面材质 --><transform name="toWorld"><scale x="10" y="10" z="1"/><translate x="0" y="0" z="-0.5"/></transform></shape><shape type="rectangle"><transform name="toWorld"><scale x="10" y="10" z="1"/><lookat origin="-4,4,20" target="0,0,0" up="0,0,1"/></transform><emitter type="area"><rgb name="radiance" value="6,6,6"/></emitter></shape>
</scene>
深追无益, 现在只关注几个要点, 用以调整生成点云渲染图的视角和颜色效果:
sensor -> transform -> lookat影响视角: 查看方向和朝上的方向决定了你看到图片的效果;<float name="fov" value="25"/>视场角决定了相机能看到的范围大小;sensor -> film影响生成图片的分辨率;
3. Mitsuba2 小结
有了这些, 已经足够渲染点云, 也能更改渲染时的各种属性. 存在的问题在于:
- Windows 下安装麻烦, 不想安装 Visual Studio, 因为它太大了;
- 目前无法使用 GPU;
然后, 目光转向:

4. Mitsuba3
Mitsuba2 已经被弃用, 不会再有更新和维护. Mitsuba3 已发布, 解决了之前的很多问题, 那就看一看咋样吧.
4.1 Mitsuba3 安装
Mitsuba3 官方已经打包了 PYPI 包, 可以直接用 pip 安装了(暂时没有 conda 渠道, 不过 Windows 下也能轻松安装了):
pip install mitsuba
Requirements
- Python >= 3.8
- (optional) For computation on the GPU: NVidia driver >= 495.89
- (optional) For vectorized / parallel computation on the CPU: LLVM >= 11.1
无需自己手动编译, 可直接在 Python 脚本中调用:
import mitsuba as mimi.set_variant('scalar_rgb') # 设置后端
scene_dict = mi.cornell_box() # 包内提供的一个描述场景信息的字典, 等价于 xml 文件
scene = mi.load_dict(scene_dict) # 加载场景
img = mi.render(scene) # 渲染
mi.Bitmap(img).write('cbox.exr') # 保存
当然也可以命令行调用:
~# mitsuba -h
Mitsuba version 3.5.2 (master[29d6537], Linux, 64bit, 64 threads, 8-wide SIMD)
Copyright 2022, Realistic Graphics Lab, EPFL
Enabled processor features: cuda llvm avx f16c sse4.2 x86_64
PYPI 包默认编译了 4 个后端:
>>> mi.variants()
['scalar_rgb', 'scalar_spectral', 'cuda_ad_rgb', 'llvm_ad_rgb']
# 注意, 在 Mitsuba3 中, 后端名不太一样, packet --> llvm, gpu --> cuda
基本够用了, 但如果你需要其他后端, 可以像 Mitsuba2 一样进行配置和编译. 比较麻烦, 不过比 Mitsuba2 好的地方在于, 我发现 Mitsuba3 的代码仓库中有 pyproject.toml 文件, 那么就可能通过:
cd <root of the repository>
pip install .
进行安装, 过程中会进行源代码的编译和安装. 我试了试, 无论是直接 cmake .. 还是 pip install ., 都失败了, 算了.
4.2 Quickstart
Mitsuba3 使用一个叫 Dr.Jit 的后端计算工具库, 这可能会在后面的高级用法中用到, 本节先介绍一下 Dr.Jit 的 Quickstart, 然后介绍 Mitsuba3 的 Quickstart.
Dr.Jit是为 Mitsuba3 特意设计的, 但也可以用作其他计算用途.
重磅: 后面会牵扯到不少渲染, scalar 和 llvm 都比较慢(后来发现, 即使在 scalar 下, CPU 都会 100%), 于是到 Colab 尝试, 分得 T4 GPU, 渲染竟然瞬间完成. 可结果却是模糊的…
4.2.1 Dr.Jit Quickstart (Similarity with NumPy)
Dr.Jit 语法很像 NumPy, 且两个库是可互操作的:
from drjit.llvm import Float, UInt32# Create some floating-point arrays
a = Float([1.0, 2.0, 3.0, 4.0])
b = Float([4.0, 3.0, 2.0, 1.0])# Perform simple arithmetic
c = a + 2.0 * b
print(f'c -> ({type(c)}) = {c}')# Convert to NumPy array
d = np.array(c)
print(f'd -> ({type(d)}) = {d}')
这里
from drjit.llvm import Float, UInt32有问题, 虽然能运行, 但 IDE 中写代码会报错: 找不到llvm, 其他后端如cuda也一样. 这可能是其.pyi文档有问题. 改成from drjit import llvm就没问题了, 然后通过llvm.Float, llvm.UInt32访问其中的类.
注意, 尝试了修改其.pyi文件, 得到的结果是连运行都不行了.
与 NumPy 不同, Dr.Jit 可以选择在 GPU 上运算:

其他就不多说了, 如有需要, 可参考 Dr.Jit Quickstart.
4.2.2 Mitsuba3 Quickstart
上面安装后的测试已经是 Mitsuba3 的 Quickstart 了, 这里重复一遍, 并加以说明:
>>> import mitsuba as mi
>>> mi.variants()
['scalar_rgb', 'scalar_spectral', 'cuda_ad_rgb', 'llvm_ad_rgb']
这是默认的四个后端, 可以选择其中一个:
>>> mi.set_variant("scalar_rgb")
然后加载场景文件, 支持 XML 格式和 DICT 格式:
scene = mi.load_file("./scenes/cbox.xml")
scenes 可在这里下载. 渲染 (We can for example pass the desired number of samples per pixel (SPP)):
image = mi.render(scene, spp=256)
可用 matplotlib 画出渲染结果:
import matplotlib.pyplot as pltplt.axis("off")
plt.imshow(image ** (1.0 / 2.2)); # approximate sRGB tonemapping

可以保存为各种格式的图片:
mi.util.write_bitmap("my_first_render.png", image)
mi.util.write_bitmap("my_first_render.exr", image)
相关文章:
Mitsuba 渲染基础
Mitsuba 渲染基础 0. Abstract1. 安装 Mitsuba21.1 下载 Mitsuba2 源码1.2 选择后端 (variants)1.3 编译 2. [Mitsuba2PointCloudRenderer](https://github.com/tolgabirdal/Mitsuba2PointCloudRenderer)2.1 Mitsuba2 渲染 XML2.2 Scene 场景的 XML 文件格式2.2.1 chair.npy to…...

深入理解 WebSocket:实时通信的利器
深入理解 WebSocket:实时通信的利器 1. 什么是 WebSocket? WebSocket 是一种网络通信协议,它允许服务器和客户端之间建立持久的双向通信通道,适用于高频率、低延迟的数据交换场景。在传统的 HTTP 通信中,每次请求都需…...

OpenEuler配置本地yum源
0x00 服务器版本 将本地镜像传输至服务器 操作步骤如下 # 创建一个目录用于挂载光盘映像 mkdir /media/cdrom/# 将光盘映像挂载到指定目录 mount /kvm/openeuler.iso /media/cdrom/#进入Yum仓库配置目录 cd /etc/yum.repos.d/# 备份原有的 openEuler.repo 文件 mv openEuler.…...
论文不同写作风格下的ChatGPT提示词分享
学境思源,一键生成论文初稿: AcademicIdeas - 学境思源AI论文写作 在学术论文写作中,不同的写作风格能显著影响文章的表达效果与读者的理解。无论是描述性、分析性、论证性,还是批判性写作风格,合理选择和运用恰当的写…...

单点登录(SSO)基础
单点登录(SSO, Single Sign-On) 是一种身份认证机制,允许用户在多个独立的应用系统中只进行一次登录操作,即可访问所有授权的应用或服务,而无需每次切换应用时都进行登录。SSO 提高了用户体验的便捷性,同时…...

设置VsCode搜索时排除文件,文件列表中隐藏文件
按照《VsCode gdb gdbserver远程调试C程序》中介绍的方法,配置好VsCode后,打开一个C/C工程,发现左侧的面板会显示编译时生成的中间文件(比如.d和.o文件)。我们可以通过设置隐藏掉一些我们不需要打开的文件以简洁面板…...

急!现在转大模型还来得及吗?零基础入门到精通,收藏这一篇就够了
大模型的出现,让行内和行外大多数人都感到非常焦虑。 行外很多人想了解却感到无从下手,行内很多人苦于没有硬件条件无法尝试。想转大模型方向,相关的招聘虽然层出不穷,但一般都要求有大模型经验。而更多的人,则一直处…...

使用 lstm + crf 实现NER
条件随机场CRF 前言 CRF是给定一组输入随机变量条件下另一组输出随机变量的条件概率分布的模型。特点:假设输出随机变量构成马尔卡夫随机场。CRF可以用于不同的预测问题。但是主要讨论线性链条件随机场,这时问题变成了由输入序列对输出序列的判别模型&…...

【牛掰】这款RPA多平台引流获客软件已正式上线,助您日引流1000+
哈喽大家好我是年哥,自从上次与大家团购了那款基于autojs开发的RPA引流获客的源码,经过本缝合怪不断地修修补补,终于将它变成自己的了,还为它起了个魔幻的名字:获客宝RPA。尽管部分功能还有点瑕疵,但是不管…...

Python的包管理工具pip安装
Python的包管理工具pip安装 一、安装步骤1.检查 pip是否已安装2.安装 pip方法一:通过 ensurepip 模块安装(推荐)方法二:通过 get-pip.py 脚本安装(经常应为网络域名问题连接不上) 3.验证pip安装4.创建别名5.更新pip 二、常…...

《AIGC 时代程序员的应对之策》
在 AIGC 大语言模型不断涌现、AI 辅助编程工具日益普及的当下,程序员的工作方式确实面临着深刻变革。对于程序员来说,如何应对这一趋势成为了至关重要的问题。 一方面,有人担忧 AI 可能取代部分编程工作。不可否认,随着技术的发展…...

51单片机系列-串口(UART)通信技术
🌈个人主页: 羽晨同学 💫个人格言:“成为自己未来的主人~” 并行通信和串行通信 并行方式 并行方式:数据的各位用多条数据线同时发送或者同时接收 并行通信特点:传送速度快,但因需要多根传输线…...

使用k8s部署java前后端服务
一、项目架构 前端、后端、数据库 1)前端 静态的资源:img css html js文件 js:axios、ajax 2)后端 提供数据:根据web前端发送的请求,从数据库中获取数据 请求都是无状态的,如何保持会话 …...

使用docker创建zabbix服务器
首先保证服务器已正常安装docker,然后执行下面这几个容器创建命令: #创建MySQL容器 docker run --name mysql-server -t --restartunless-stopped -e MYSQL_DATABASE"zabbix" -e MYSQL_USER"zabbix" -e MYSQL_PASSWORD"zabbix_…...
=>{console.log(“Hello“);})
nodejs 016: javascript语法——解构赋值({ a, b, c } = {})=>{console.log(“Hello“);}
在 JavaScript 中,函数参数 { a, b, c } {} 的含义是在函数定义时提供一个默认的对象参数。这个对象包含了三个可选的属性 a, b, 和 c。如果没有传递参数或者传递的参数是一个非对象类型的值,那么函数内部将使用一个空对象 {} 作为参数。 示例 const …...

【人人都能看懂的大模型原理】(一)
前言 当前大模型的学习资源呈现爆发趋势,各种角色的人都用自己的视角参与到大模型的讨论。但是我发现这些学习资源都有几个特点:只摆事实而不讲道理;只讲应用可能而不提实现代价;只讲可能性而缺乏实操经验分享;洞察材…...

JMeter源码解析之JMeter命令行新增命令
JMeter源码解析之JMeter命令行新增命令 需求描述 需要新增一条命令,能够在JMeter命令行中能够展示输入对应的JMeter命令,能够展示对应的命令信息 查看命令效果如下: apache-jmeter-5.1\bin>jmeter --? Copyright © 1999-2024 The …...

YOLOv8 Windows c++推理
#添加一个**yolov8\_。onx **和/或**yolov5\_。Onnx **模型(s)到ultralytics文件夹。 #编辑**main.cpp**来改变**projectBasePath**来匹配你的用户。#请注意,默认情况下,CMake文件将尝试导入CUDA库以与opencv dnn (cuDNN) GPU推理一起使用。 #如果你的Op…...

一文读懂Python中的Popen函数
目录 1. 基本知识2. Demo 1. 基本知识 在Python中,Popen 是 subprocess 模块中的一个函数,它用于创建一个子进程并与其进行通信 subprocess.Popen():Popen 类用于创建和管理子进程 与 os.system() 或 os.popen() 相比,Popen 提供…...
07-阿里云镜像仓库
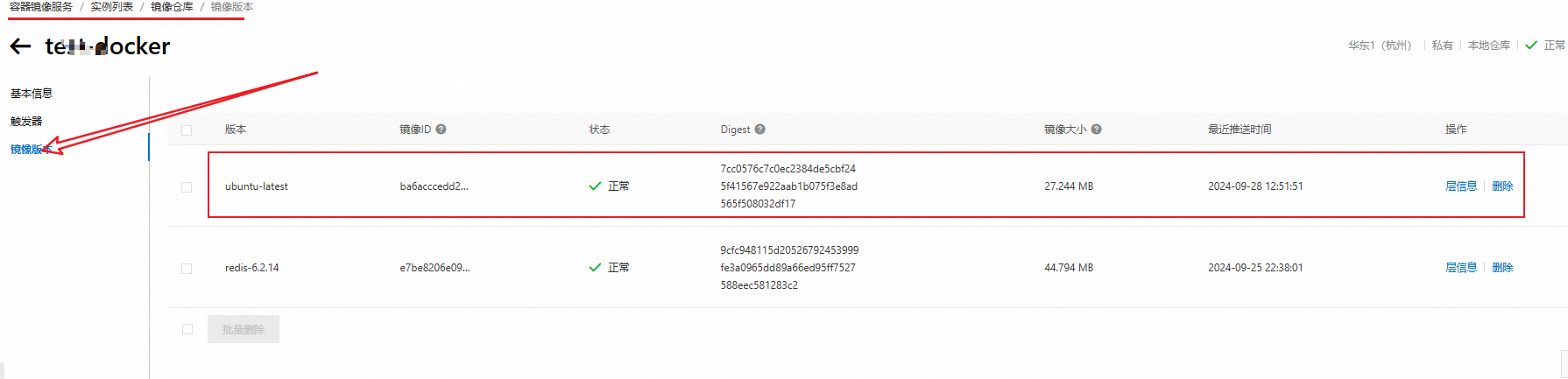
07-阿里云镜像仓库 注册阿里云 先注册一个阿里云账号:https://www.aliyun.com/ 进入容器镜像服务控制台 工作台》容器》容器服务》容器镜像服务 实例列表》个人实例 仓库管理》镜像仓库》命名空间》创建命名空间 仓库管理》镜像仓库》镜像仓库》创建镜像仓库 使…...

终极免费文档下载指南:kill-doc让你轻松保存百度文库等30+平台内容
终极免费文档下载指南:kill-doc让你轻松保存百度文库等30平台内容 【免费下载链接】kill-doc 看到经常有小伙伴们需要下载一些免费文档,但是相关网站浏览体验不好各种广告,各种登录验证,需要很多步骤才能下载文档,该脚…...

题解:学而思编程 3或5的倍数
本文分享的必刷题目是从蓝桥云课、洛谷、AcWing等知名刷题平台精心挑选而来,并结合各平台提供的算法标签和难度等级进行了系统分类。题目涵盖了从基础到进阶的多种算法和数据结构,旨在为不同阶段的编程学习者提供一条清晰、平稳的学习提升路径。 欢迎大…...

深度解析AI模型Docker镜像:从DeepSeek部署到生产级容器化实践
1. 项目概述:一个AI模型镜像的深度解构最近在社区里看到不少朋友在讨论dirk1983/deepseek这个Docker镜像,作为一个长期在AI工程化和容器化部署一线摸爬滚打的从业者,我觉得有必要来聊聊这个看似简单的镜像背后,究竟藏着哪些门道。…...

开源工作流引擎ByteChef:从组件化架构到自动化编排实战
1. 项目概述:一个面向开发者的自动化工作流引擎如果你是一名开发者,或者经常需要处理跨系统、跨应用的数据同步、定时任务、API调用编排,那么你大概率对“自动化”有着强烈的需求。我们可能都经历过这样的场景:每天手动从A系统导出…...

别再只盯着CVE-2017-7529复现了,聊聊Nginx缓存机制下的那些‘信息泄露’风险
深入解析Nginx缓存机制与敏感信息防护实践 Nginx作为现代Web架构的核心组件,其高效的缓存机制在提升性能的同时也隐藏着不容忽视的安全隐患。当开发者们热衷于讨论CVE-2017-7529这类高危漏洞的复现时,我们更需要将目光投向日常配置中那些容易被忽视的信息…...

VMware ESXi版本回退全攻略:从适用条件、DCUI操作到6.x升7.0的‘后悔药’失效分析
VMware ESXi版本回退深度解析:从技术原理到实战避坑指南 在虚拟化运维领域,版本升级往往伴随着不可预知的风险。当新版本出现兼容性问题或性能异常时,版本回退能力就成为系统管理员手中的"后悔药"。然而,不同于普通软件…...

如何轻松搞定浏览器视频下载:3步安装免费插件完全指南
如何轻松搞定浏览器视频下载:3步安装免费插件完全指南 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 还在为无法保存网页视频而烦…...

DIY智能烛光发饰:用导电缝纫线制作可穿戴电子入门项目
1. 项目概述:当传统手工艺遇上智能微光几年前,我开始接触可穿戴电子,最初的想法很简单:让日常穿戴的物件不只是静态的装饰,而是能与人产生动态交互的“伙伴”。从在衣服上缝几个会亮的LED,到尝试集成传感器…...

AB下载管理器终极指南:高效管理你的下载任务
AB下载管理器终极指南:高效管理你的下载任务 【免费下载链接】ab-download-manager A Download Manager that speeds up your downloads 项目地址: https://gitcode.com/GitHub_Trending/ab/ab-download-manager AB下载管理器是一款基于Kotlin开发的开源跨平…...

淘宝反爬升级应对:从Selenium到Playwright的迁移实践
前言 随着淘宝反爬体系持续迭代升级,传统 Selenium 爬虫面临指纹特征暴露、浏览器特征极易识别、检测门槛持续降低三大痛点。大量基于 Selenium 的淘宝爬虫出现账号限流、页面 403 拦截、滑块强校验、直接封禁 IP 等问题。 在电商爬虫、价格监控、商品采集、店铺数…...