Robot Operating System——一组三维空间中的位姿(位置和方向)
大纲
- 应用场景
- 1. 机器人导航
- 场景描述
- 具体应用
- 2. 运动规划
- 场景描述
- 具体应用
- 3. 物体识别和跟踪
- 场景描述
- 具体应用
- 4. 环境建模
- 场景描述
- 具体应用
- 5. 仿真环境
- 场景描述
- 具体应用
- 定义
- 字段解释
- 案例
geometry_msgs::msg::PoseArray 是 ROS 2 中的一个消息类型,用于表示一组三维空间中的位姿(位置和方向)。它包含一个 std_msgs::msg::Header 和一个 std::vector<geometry_msgs::msg::Pose>,分别表示消息头和位姿数组。PoseArray 在机器人导航、运动规划、物体识别和跟踪、环境建模等场景中非常有用。
应用场景
1. 机器人导航
场景描述
在机器人导航中,需要使用位姿数组来表示路径上的多个关键点。这对于实现机器人在环境中的自主导航和路径规划非常重要。
具体应用
- 路径表示:使用 geometry_msgs::msg::PoseArray 表示机器人导航路径上的多个关键点。例如,在移动机器人导航任务中,使用 PoseArray 消息表示路径上的多个关键点,以进行路径规划和导航。
- 路径优化:使用 geometry_msgs::msg::PoseArray 表示优化后的路径。例如,在机器人路径优化任务中,使用 PoseArray 消息表示优化后的路径,以提高导航效率和精度。
2. 运动规划
场景描述
在运动规划中,需要使用位姿数组来表示机器人运动路径上的多个关键点。这对于实现机器人在三维空间中的精确运动规划非常重要。
具体应用
- 运动路径表示:使用 geometry_msgs::msg::PoseArray 表示机器人运动路径上的多个关键点。例如,在机器人运动规划任务中,使用 PoseArray 消息表示运动路径上的多个关键点,以进行运动规划和控制。
- 运动轨迹记录:使用 geometry_msgs::msg::PoseArray 表示机器人运动过程中的轨迹。例如,在机器人运动任务中,使用 PoseArray 消息记录机器人运动过程中的轨迹,以进行运动分析和优化。
3. 物体识别和跟踪
场景描述
在物体识别和跟踪中,需要使用位姿数组来表示多个物体的位姿。这对于实现多物体的识别、跟踪和操作非常重要。
具体应用
- 多物体识别:使用 geometry_msgs::msg::PoseArray 表示多个物体的位姿。例如,在机器人视觉任务中,使用 PoseArray 消息表示相机捕捉到的多个物体的位姿,以进行物体识别和定位。
- 多物体跟踪:使用 geometry_msgs::msg::PoseArray 表示多个物体的位姿。例如,在机器人跟踪任务中,使用 PoseArray 消息表示多个物体的位姿,以进行物体跟踪和操作。
4. 环境建模
场景描述
在环境建模中,需要使用位姿数组来表示环境中的多个关键点或特征点。这对于实现环境的三维建模和重建非常重要。
具体应用
- 特征点表示:使用 geometry_msgs::msg::PoseArray 表示环境中的多个特征点。例如,在机器人建图任务中,使用 PoseArray 消息表示环境中的多个特征点,以进行环境建模和重建。
- 关键点表示:使用 geometry_msgs::msg::PoseArray 表示环境中的多个关键点。例如,在机器人导航任务中,使用 PoseArray 消息表示环境中的多个关键点,以进行路径规划和导航。
5. 仿真环境
场景描述
在仿真环境中,需要使用位姿数组来表示多个物体的位姿。这对于实现仿真环境中的精确计算和模拟非常重要。
具体应用
- 物体位姿仿真:使用 geometry_msgs::msg::PoseArray 表示多个物体的位姿。例如,在机器人仿真任务中,使用 PoseArray 消息表示多个物体的位姿,以进行运动仿真和控制。
- 轨迹仿真:使用 geometry_msgs::msg::PoseArray 表示物体运动过程中的轨迹。例如,在机器人仿真任务中,使用 PoseArray 消息表示物体运动过程中的轨迹,以进行运动仿真和控制。
定义
namespace geometry_msgs
{
namespace msg
{struct PoseArray
{std_msgs::msg::Header header;std::vector<geometry_msgs::msg::Pose> poses;
};} // namespace msg
} // namespace geometry_msgs
字段解释
- header:消息头,包含时间戳和坐标系信息。
- poses:位姿数组,包含多个 geometry_msgs::msg::Pose,每个 Pose 表示一个位姿。
案例
#include "rclcpp/rclcpp.hpp"
#include "geometry_msgs/msg/pose_array.hpp"
#include "geometry_msgs/msg/pose.hpp"
#include "std_msgs/msg/header.hpp"class PoseArrayPublisher : public rclcpp::Node
{
public:PoseArrayPublisher() : Node("pose_array_publisher"){publisher_ = this->create_publisher<geometry_msgs::msg::PoseArray>("pose_array_topic", 10);timer_ = this->create_wall_timer(500ms, std::bind(&PoseArrayPublisher::publish_pose_array, this));}private:void publish_pose_array(){auto message = geometry_msgs::msg::PoseArray();message.header.stamp = this->now();message.header.frame_id = "map";geometry_msgs::msg::Pose pose1;pose1.position.x = 1.0;pose1.position.y = 2.0;pose1.position.z = 3.0;pose1.orientation.x = 0.0;pose1.orientation.y = 0.0;pose1.orientation.z = 0.0;pose1.orientation.w = 1.0;geometry_msgs::msg::Pose pose2;pose2.position.x = 4.0;pose2.position.y = 5.0;pose2.position.z = 6.0;pose2.orientation.x = 0.0;pose2.orientation.y = 0.0;pose2.orientation.z = 0.0;pose2.orientation.w = 1.0;message.poses.push_back(pose1);message.poses.push_back(pose2);publisher_->publish(message);}rclcpp::Publisher<geometry_msgs::msg::PoseArray>::SharedPtr publisher_;rclcpp::TimerBase::SharedPtr timer_;
};int main(int argc, char *argv[])
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<PoseArrayPublisher>());rclcpp::shutdown();return 0;
}
相关文章:
)
Robot Operating System——一组三维空间中的位姿(位置和方向)
大纲 应用场景1. 机器人导航场景描述具体应用 2. 运动规划场景描述具体应用 3. 物体识别和跟踪场景描述具体应用 4. 环境建模场景描述具体应用 5. 仿真环境场景描述具体应用 定义字段解释 案例 geometry_msgs::msg::PoseArray 是 ROS 2 中的一个消息类型,用于表示一…...

mycat读写分离中间件
5、部署Mycat读写分离中间件服务 5.1安装Mycat服务 将Mycat服务的二进制软件包Mycat-server-1.6-RELEASE-20161028204710-linux.tar.gz上传到Mycat虚拟机的/root目录下,并将软件包解压到/use/local目录中 5.2赋予解压后的mycat目录权限 5.3向/etc/profile系统变量…...
Growthly Quest 增长工具:助力 Web3 项目实现数据驱动的增长
作者:Stella L (stellafootprint.network) 在瞬息万变的 Web3 领域,众多项目在用户吸引、参与和留存方面遭遇重重难关。Footprint Analytics 推出 Growthly,作为应对这些挑战的全方位解决方案,其中创新性的 Quest(任务…...
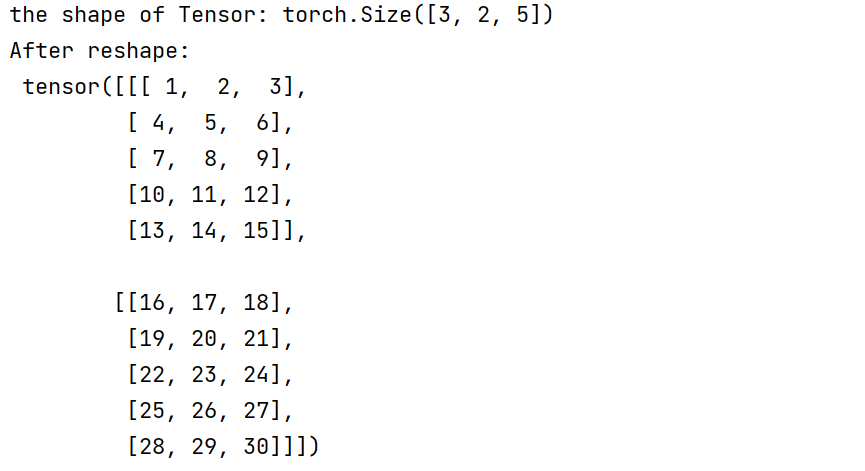
Pytorch 学习手册
零 相关资料 官方网址 官方网址下的API搜索网站 一 定义 深度学习框架是用于设计、训练和部署深度学习模型的软件工具包。这些框架提供了一系列预定义的组件,如神经网络层(卷积层、全连接层等)、损失函数、优化器以及数据处理工具…...
——Vite 环境变量)
第十一章 【前端】调用接口(11.1)——Vite 环境变量
第十一章 【前端】调用接口 11.1 Vite 环境变量 参考:https://cn.vitejs.dev/guide/env-and-mode.html Vite 在一个特殊的 import.meta.env 对象上暴露环境变量。为了防止意外地将一些环境变量泄漏到客户端,只有以 VITE_ 为前缀的变量才会暴露给经过 …...

MySQL添加时间戳字段并且判断插入或更新时间
文章目录 步骤 1: 修改表结构步骤 2: 插入或更新数据步骤 3: 查询数据并判断时间完整示例 在MySQL中,可以在表中添加一个时间戳字段来记录每条数据的最后插入或更新时间。然后,在插入或更新数据时,自动更新这个时间戳字段。最后,在…...
)
SOA(面相服务架构)
目录 SOA的基本概念 SOA的关键特性 SOA的实现步骤 SOA的技术实现 SOA的应用场景 面向服务的架构(Service-Oriented Architecture, SOA)是一种软件设计理念和架构模式,旨在通过网络协议将不同的服务相互连接和集成,以构建灵活、可扩展和可重用的应用系统。SOA的…...
关联场景中,如何从模型(一)关联到模型(多)的某个字段)
One2many(一对多)关联场景中,如何从模型(一)关联到模型(多)的某个字段
好的,我们用一个更通俗的例子来解释不同模块之间的模型关联,场景是“学校和学生”的例子。 1. 场景介绍 假设我们有两个模块: 学校模块 (school):用于管理学校信息。学生模块 (student):用于管理学生信息。 每个学…...

LLaMA 3 和 OpenAI有哪些相同点和不同点?
LLaMA 3(Meta 的 LLaMA 系列)和 OpenAI 的模型(如 GPT 系列)都是先进的 大语言模型(LLMs),它们在训练、应用场景和能力上有很多相似之处,但也存在显著的不同点。以下是一些关键相同点…...

Spring 事务管理及失效总结
所谓事务管理,其实就是“按照给定的事务规则来执行提交或者回滚操作”。 Spring 并不直接管理事务,而是提供了多种事务管理器,他们将事务管理的职责委托给 Hibernate 或者 JTA 等持久化机制所提供的相关平台框架的事务来实现。 Spring 事务…...
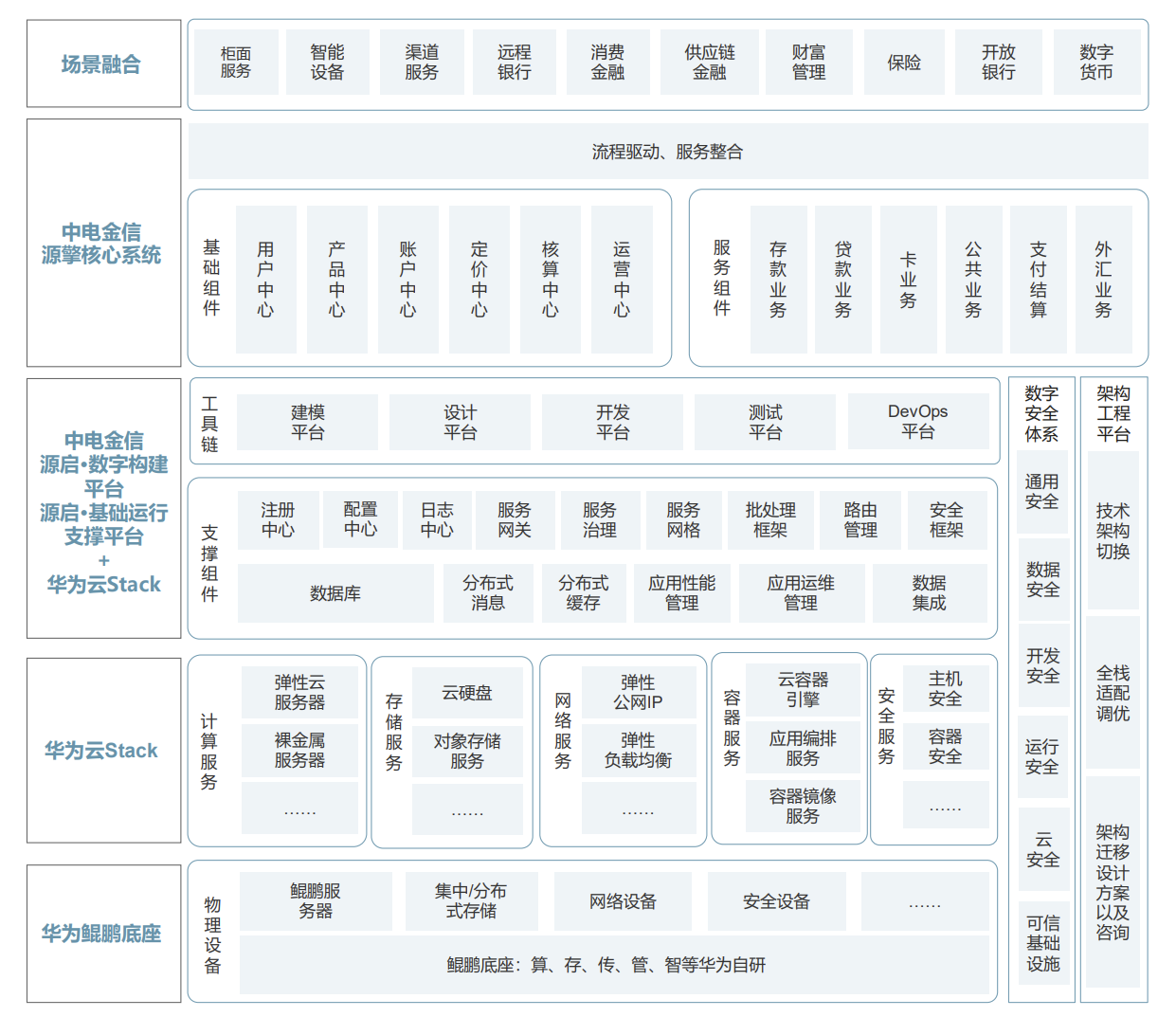
全局思维下的联合创新:华为携手ISV伙伴助推银行核心平稳升级
文 | 螳螂观察 作者 | 李永华 随着数字金融快速发展,对核心系统提出了“海量、高效、弹性、扩展、敏捷”等新需求,区域性银行面临核心系统升级的迫切需要,对金融科技厂商而言也催生了庞大的机遇和空间。 只是,银行核心系统是金…...

深度估计任务中的有监督和无监督训练
在计算机视觉领域,深度估计任务一直是研究的热点之一。它旨在通过图像或视频数据来推断场景中物体与相机之间的距离,为许多应用提供关键信息,如自动驾驶、机器人导航、增强现实等。在深度估计任务中,有监督训练和无监督训练是两种…...

扩散模型DDPM代码实践
安装diffusers pip install diffusers 按照diffusers官方代码 from diffusers import DDPMPipelinepipe DDPMPipeline.from_pretrained("google/ddpm-cat-256")image pipe().images[0]image.save("/data/zhz/projects/diffusion/output/ddpm_generated_imag…...

关于GPIO输入模式的配置选择
GPIO(通用输入输出)口是嵌入式系统中的重要组成部分,输入模式使得微控制器能够与外部世界进行交互。本文将探讨GPIO输入模式中的浮空输入、上拉输入和下拉输入的配置、使用场景及注意事项,并提供一些决策指导,帮助读者…...

【Kubernetes】日志平台EFK+Logstash+Kafka【实战】
一,环境准备 (1)下载镜像包(共3个): elasticsearch-7-12-1.tar.gz fluentd-containerd.tar.gz kibana-7-12-1.tar.gz (2)在node节点导入镜像: ctr -nk8s.io images i…...

今天推荐一个文档管理系统 Dorisoy.Pan
Dorisoy.Pan 是一个基于 .NET 8 和 WebAPI 构建的文档管理系统,它集成了 Autofac、MediatR、JWT、EF Core、MySQL 8.0 和 SQL Server 等技术,以实现一个简单、高性能、稳定且安全的解决方案。 这个系统支持多种客户端,包括网站、Android、iO…...

【RocketMQ】消费失败重试与死信消息
🎯 导读:本文档详细介绍了RocketMQ中的重试机制与死信消息处理方法。对于生产者而言,文档提供了如何配置重试次数的具体示例;而对于消费者,它解释了默认情况下消息消费失败后的重试策略,并展示了如何通过代…...

注册安全分析报告:闪送
前言 由于网站注册入口容易被黑客攻击,存在如下安全问题: 暴力破解密码,造成用户信息泄露短信盗刷的安全问题,影响业务及导致用户投诉带来经济损失,尤其是后付费客户,风险巨大,造成亏损无底洞…...

SpringCloud入门
SpringCloud 原版笔记:狂神说笔记——SpringCloud快速入门23 - subeiLY - 博客园 (cnblogs.com) 一.前言 常见面试题 什么是微服务? 微服务之间是如何独立通讯的? SpringCloud 和 Dubbo有哪些区别? SpringBoot和SpringCloud&…...

js替换css主题变量并切换iconfont文件
iconfont不止有单色、双色的图标,还有很多【多色】的图标,于是不能【去色】,只能手动替换primary 新建一个iconfont,替换过主题色的,然后与旧的iconfont配合切换使用 主要如下: reqiure之前必须【清除缓…...

Muse:现代化多仓库管理工具,提升开发效率与协作体验
1. 项目概述:一个面向开发者的现代化代码库管理工具最近在和一些团队交流时,发现一个挺普遍的现象:大家手头的项目代码库越来越多,有的是自己维护的开源项目,有的是公司内部的核心业务模块,还有一堆实验性的…...
)
告别编译地狱!树莓派4B上快速部署face_recognition库的三种方法(含OpenCV轻量安装)
树莓派4B人脸识别开发环境快速部署指南 每次在树莓派上配置人脸识别开发环境,最让人头疼的就是漫长的编译等待和层出不穷的依赖问题。特别是OpenCV这个计算机视觉领域的"瑞士军刀",完整编译动辄需要数小时,稍有不慎就会前功尽弃。本…...

FastAPI项目实战:从零构建现代化Python Web API的完整指南
1. 从零到一:一个完整的 FastAPI 项目实战复盘最近在社区里看到一个挺有意思的葡萄牙语开源教程项目,叫“FastAPI do Zero”。虽然页面是葡萄牙语,但技术栈和路径对我们来说再熟悉不过了:FastAPI、Pydantic、SQLAlchemy、Alembic&…...

构建个人技能知识库:从Markdown管理到自动化实践
1. 项目概述:一个技能库的诞生与价值最近在整理个人知识体系时,我一直在思考一个问题:如何将那些零散的、跨领域的“技能点”系统化地管理起来,形成一个可以持续迭代、随时取用的个人工具箱?这不仅仅是写一份简历上的技…...

从OCP协议到3D寄生提取:EDA/IP技术演进与工程实践深度解析
1. 行业动态综述:从新闻简报到深度洞察每周追踪EDA(电子设计自动化)和IP(知识产权核)领域的动态,已经成了我从业十几年来的一个习惯。这不仅仅是看看新闻,更像是定期参加一场虚拟的行业技术交流…...

告别模拟开关:用TLC7528双DAC为你的STM32项目扩展模拟输出通道
告别模拟开关:用TLC7528双DAC为你的STM32项目扩展模拟输出通道 在嵌入式系统开发中,模拟信号输出是许多控制系统的核心需求。无论是精密仪器、工业自动化还是音频处理,都需要稳定可靠的模拟输出通道。然而,大多数STM32微控制器内置…...

基于RAG与MCP协议构建实时新闻AI助手:newsmcp项目实战解析
1. 项目概述:一个让AI“读新闻”的智能工具最近在折腾AI应用开发的朋友,可能都绕不开一个核心问题:如何让大语言模型(LLM)获取并理解最新的、模型训练数据之外的信息?比如,你想让ChatGPT帮你分析…...

【最新v2.7.1 版本安装包】OpenClaw 新手部署全攻略,无需命令零代码一键安装保姆级
Windows 一键部署 OpenClaw 教程|5 分钟搞定本地 AI 智能体,告别复杂配置 核心亮点 零代码门槛|全程可视化|无需手动配置运行环境|内置全部运行依赖|28 万 Tokens 额度 前言 2026 年开源圈热度居高不下…...
)
别再只会用IP核了!手把手教你用Verilog从零实现一个16阶FIR滤波器(附完整代码)
从零构建16阶FIR滤波器:Verilog实战指南与工程思维解析 在FPGA开发领域,FIR(有限脉冲响应)滤波器是数字信号处理的基础模块,但大多数工程师习惯直接调用厂商提供的IP核,这就像只会开自动挡汽车的司机——虽…...

ComfyUI-VideoHelperSuite VHS_VideoCombine节点缺失问题深度分析与解决方案
ComfyUI-VideoHelperSuite VHS_VideoCombine节点缺失问题深度分析与解决方案 【免费下载链接】ComfyUI-VideoHelperSuite Nodes related to video workflows 项目地址: https://gitcode.com/gh_mirrors/co/ComfyUI-VideoHelperSuite 技术问题深度分析 问题现象与影响范…...