移情别恋c++ ദ്ദി˶ー̀֊ー́ ) ——13.mapset(模拟实现)
1.对红黑树进行改造
1.1treenode模板参数改变
之前构建treenode模板参数传的是class k,class v(set为k,k;map是k,v),现在直接用T代替
template<class T> //这里直接传了T作为模板参数,T可能是pair<k,t>,也可能是k
struct RBTtreenode
{RBTtreenode<T>* _left;RBTtreenode<T>* _right;RBTtreenode<T>* _parent;//pair<K, V> kv;T data;color col;RBTtreenode(const T& _data):_left(nullptr), _right(nullptr), _parent(nullptr), data(_data), col(RED){}
}; 
2.构建红黑树的迭代器
因为要构建const_iterator(不可修改内容) 和iterator(可修改内容)所以需要三个模板参数
//<T,T&,T*> iterator;//普通迭代器
//<T, const T&, const T*> const_iterator;//指向的东西不能改变template<class T,class Ref,class Ptr>
iterator内存的是node*类型的数据!!!!
2.1 重载operator*() (set)
因为set传模板参数只传K,没有V,data类型是K,
所以用*直接取得data即可
Ref operator*()
{return _node->data;
}2.2 重载operator->() (map)
因为map模板参数传的是K,pair<const K,T>,data类型是pair<const K,T>,
想取到K,则需要传回&data,再用->first取得K
Ptr operator->()
{return &_node->data;
}2.3operator++()与operator--()
这里以operator++()做解释:
分三种情况:
1.如果右子树不为空,则找到右子树的最左节点
2.//如果右子树为空,且cur是parent的右子树,则先parent回溯至parent->_parent,再_node变为parent
3.//如果右子树为空,且cur是parent的左子树,则_node变为parent
iterator& operator++()
{if (_node->_right){//如果右子树不为空,则找到右子树的最左节点node* cur = _node->_right;while (cur && cur->_left){cur = cur->_left;}_node = cur;}else{//如果右子树为空,且cur是parent的右子树,则先parent回溯至parent->_parent,再_node变为parent//如果右子树为空,且cur是parent的左子树,则_node变为parentnode* cur = _node;node* parent = cur->_parent;while (parent && cur == parent->_right){cur = parent;parent = parent->_parent;}_node = parent;}return *this;
}2.4.begin()&&end()
iterator begin()
{node* flag = root;while (flag&&flag->_left)//flag可能为nullptr{flag = flag->_left;}return iterator(flag);
}iterator end()
{return iterator(nullptr); //end用nullptr去构造!!!!!!!!
}const_iterator begin() const
{node* flag = root;while (flag && flag->_left)//flag可能为nullptr{flag = flag->_left;}return const_iterator(flag);
}const_iterator end() const
{return const_iterator(nullptr); //end用nullptr去构造!!!!!!!!
}3.set.h封装
https://cplusplus.com/reference/set/set/?kw=set
#include"rbt.h"
namespace zone
{template<class K>class set{public:struct setkeyoft //仿函数,用来取出红黑树节点data中的key{const K& operator()(const K& key){return key;}};//set这里的迭代器本质都是const_iterator,因为k要求无法修改typedef typename RBTtree<K, K, setkeyoft>::const_iterator iterator;//记得要使用typename告诉编译器RBTtree<K, K, setkeyoft>::iterator这个是类型,不是函数typedef typename RBTtree<K, K, setkeyoft>::const_iterator const_iterator;iterator begin()const{return it.begin();}iterator end()const{return it.end();}pair<iterator,bool> insert(const K& key){return it.insert(key);}void inorder(){it.inorder();}private:RBTtree<K,K,setkeyoft> it;};
}3.1 仿函数setkeyoft
仿函数,用来取出红黑树节点data中的key,用于insert函数!!!!
3.2 iterator和const_iterator
//set这里的迭代器本质都是const_iterator,因为k要求无法修改
typedef typename RBTtree<K, K, setkeyoft>::const_iterator iterator;
typedef typename RBTtree<K, K, setkeyoft>::const_iterator const_iterator;
4.map.h封装
https://cplusplus.com/reference/map/map/?kw=map
#include"rbt.h"
namespace zone
{template<class K,class T>class map{public:struct setkeyoft{const K& operator()(const pair<K, T>& key){return key.first;}};//map这里的迭代器则使用的是iterator,因为k要求无法修改,但v可以修改,所以可以直接初始化时用pair<const K, T>typedef typename RBTtree<K, pair<const K, T>, setkeyoft>::iterator iterator;typedef typename RBTtree<K, pair<const K, T>, setkeyoft>::const_iterator const_iterator;pair<iterator, bool> insert(const pair<K, T>& key){return it.insert(key);}T& operator[](const K& key){pair<iterator, bool>ret = insert(make_pair(key,T()));//insert返回一个pair,first是iterator,second是bool类型return ret.first->second;}iterator begin(){return it.begin();}iterator end(){return it.end();}void inorder(){it.inorder();}private:RBTtree<K,pair<const K,T>, setkeyoft> it;};
}5.insert函数 !!!!!!!
RBT.h里insert函数的返回值是 pair<node*, bool>
但封装过后的map.h,set.h里
pair<iterator,bool> insert(const K& key) {return it.insert(key); }返回值是pair<iterator,bool>
可见 pair<node*, bool>和pair<iterator(这里的iterator已经重命名了,本质是const_iteratir),bool>并不是同一类型,该如何解决呢?


1.如果T1和U类型一致,T2和V类型一致,那么就是拷贝构造!!!
2.如果不一致,也可以进行普通构造,前提是有可以用first来构建T1的函数!!!!!
回到刚才的问题:
可见 pair<node*, bool>和pair<iterator(这里的iterator已经重命名了,本质是const_iteratir),bool>并不是同一类型,该如何解决呢?
bool类型肯定可以用bool类型初始化,
iterator可以用node*进行初始化吗?
答案是可以的
treeiterator(node* it):_node(it) {}相当于使用了隐式类型转换
6.杂谈


类比指针:
1.iterator 可修改指向的数据,也可改变自身
2.const iterator 可修改指向的数据,但不可改变自身
3.const_iterator 不可修改指向的数据,但能改变自身
7.代码全览
RBT.h
#include<iostream>using namespace std;enum color
{RED,BLACK
}; //列举color的各种可能情况template<class T> //这里直接传了T作为模板参数,T可能是pair<k,t>,也可能是k
struct RBTtreenode
{RBTtreenode<T>* _left;RBTtreenode<T>* _right;RBTtreenode<T>* _parent;//pair<K, V> kv;T data;color col;RBTtreenode(const T& _data):_left(nullptr), _right(nullptr), _parent(nullptr), data(_data), col(RED){}
};//<T,T&,T*> iterator;//普通迭代器
//<T, const T&, const T*> const_iterator;//指向的东西不能改变:const_iterator,本身不能改变:const iterator
template<class T,class Ref,class Ptr>
struct treeiterator
{typedef RBTtreenode<T> node;typedef treeiterator<T,Ref,Ptr> iterator;node* _node;treeiterator(node* it):_node(it){}Ref operator*(){return _node->data;}Ptr operator->(){return &_node->data;}iterator& operator++(){if (_node->_right){//如果右子树不为空,则找到右子树的最左节点node* cur = _node->_right;while (cur && cur->_left){cur = cur->_left;}_node = cur;}else{//如果右子树为空,且cur是parent的右子树,则先parent回溯至parent->_parent,再_node变为parent//如果右子树为空,且cur是parent的左子树,则_node变为parentnode* cur = _node;node* parent = cur->_parent;while (parent && cur == parent->_right){cur = parent;parent = parent->_parent;}_node = parent;}return *this;}iterator& operator--() //和++反着来即可{if (_node->_left){node* cur = _node->_left;while (cur && cur->_right){cur = cur->_right;}_node = cur;}else{node* cur = _node;node* parent = cur->_parent;while (parent && cur == parent->_left){cur = parent;parent = parent->_parent;}_node = parent;}return *this;}bool operator!=(const iterator&s){return _node != s._node;}
};template<class K, class T,class keyoft>
class RBTtree
{
public:typedef treeiterator<T,T&,T*> iterator;typedef treeiterator<T, const T&, const T*> const_iterator;//指向的东西不能改变typedef RBTtreenode<T> node;iterator begin(){node* flag = root;while (flag&&flag->_left)//flag可能为nullptr{flag = flag->_left;}return iterator(flag);}iterator end(){return iterator(nullptr); //end用nullptr去构造!!!!!!!!}const_iterator begin() const{node* flag = root;while (flag && flag->_left)//flag可能为nullptr{flag = flag->_left;}return const_iterator(flag);}const_iterator end() const{return const_iterator(nullptr); //end用nullptr去构造!!!!!!!!}pair<node*, bool> insert(const T& _data)//!!!!!!!!!{if (root == nullptr){root = new node(_data);root->col = BLACK;//规定根必须是黑的return make_pair(root, true);}node* parent = nullptr; //比bst多了一个parentnode* cur = root;keyoft type;//取出data的K类型的数据while (cur){parent = cur;if (type(cur->data) < type(_data)) //这里取出key再进行比较{cur = cur->_right;}else if (type(cur->data) > type(_data)){cur = cur->_left;}else{return make_pair(cur,false);}}cur = new node(_data);cur->col = RED;//因为如果插入黑色的会使很多节点的一条路径上的黑色节点增多(相当于得罪了所有人),而插入红色则有可能只得罪父亲(如果父亲是红色的话)if (type(parent->data) < type(_data)){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;node* newnode = cur;//开始调整while (parent && parent->col == RED)//parent为黑不需要调整,如果cur变成root,parent就不存在退出循环{node* grandparent = parent->_parent;//祖父一定存在,因为只有根节点是没有祖父的,而根节点一定是黑色的if (parent == grandparent->_left){// g// p unode* uncle = grandparent->_right; //父亲在左则叔叔在右if (uncle && uncle->col == RED) //情况一.如果叔叔存在且为红色{//变色parent->col = uncle->col = BLACK;grandparent->col = RED;//重置cur,parent,继续向上处理cur = grandparent;//变为祖父parent = cur->_parent;}else //叔叔不存在或为黑色,旋转加变色{// g// p// cif (cur == parent->_left) //情况二.单旋{rotateR(grandparent);parent->col = BLACK;grandparent->col = RED;}// g// p// celse //情况三.cur==parent->_right,双旋{rotateL(parent);//经历一次左旋后变成情况二!!!!!!!!!!!(cur和parent换位置)rotateR(grandparent);cur->col = BLACK;grandparent->col = RED;}break;//调整一次就结束了,所以经历过旋转后不需要重置cur,parent,grandparent}}else{// g// u p//node* uncle = grandparent->_left; //父亲在右则叔叔在左if (uncle && uncle->col == RED){parent->col = uncle->col = BLACK;grandparent->col = RED;//cur = grandparent;parent = cur->_parent;}else{// g// u p// cif (cur == parent->_right){rotateL(grandparent);parent->col = BLACK;grandparent->col = RED;}else{// g// u p// crotateR(parent);rotateL(grandparent);cur->col = BLACK;grandparent->col = RED;}break;//调整一次就结束了,所以经历过旋转后不需要重置cur,parent,grandparent}}}//1.如果parent和uncle都为RED,则可以一起变黑// 2.parent为黑不处理// 3.uncle为黑或不存在,parent为红,旋转+变色root->col = BLACK;//最后以防万一让根变为黑return make_pair(newnode, true);}void rotateL(node* parent)//左旋,(新节点插入到较高右子树的右侧)// 1.右右{node* subr = parent->_right;node* subrl = subr->_left;parent->_right = subrl;subr->_left = parent;node* ppnode = parent->_parent;parent->_parent = subr;if (subrl) //subrl可能为空!!!!!!!{subrl->_parent = parent;}if (parent == root) //即如果parent->_parent==nullptr{root = subr;subr->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subr;}else if (ppnode->_right == parent){ppnode->_right = subr;}subr->_parent = ppnode;}}void rotateR(node* parent)//右旋,(新节点插入到较高左子树的左侧)// 2.左左{node* subl = parent->_left;node* sublr = subl->_right;parent->_left = sublr;if (sublr) //sublr可能为空!!!!!!!sublr->_parent = parent;node* ppnode = parent->_parent;subl->_right = parent;parent->_parent = subl;if (root == parent){root = subl;subl->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subl;}else if (ppnode->_right == parent){ppnode->_right = subl;}subl->_parent = ppnode;}}void inorder(){_inorder(root);}void _inorder(node* root){keyoft type;if (root == nullptr)return;_inorder(root->_left);cout << type(root->data)<< " ";_inorder(root->_right);}bool check(node* it, int blacknum, int flag){if (it == nullptr){if (blacknum == flag)return true;elsereturn false;}else if (it->col == RED && it->_parent->col == RED)//十分巧妙,因为孩子的情况有很多,但父亲不是红就是黑,所以判断父亲更合适return false;else if (it->col == BLACK)blacknum++;return check(it->_left, blacknum, flag) && check(it->_right, blacknum, flag);}bool isbalance(){return _isbalance(root);}bool _isbalance(node* root){if (root == nullptr)return true;else if (root->col == RED)return false;int blacknum = 0;int flag = 0;node* k = root;while (k){if (k->col == BLACK)flag++;k = k->_left;//这里十分巧妙,因为如果为红黑树,从某一节点到空的所有路径上的黑节点数量是一致的,所以可以先随便选一条路径,算出这一条路径上的黑节点数作为基准值,在由递归去和其他路径比较}return check(root, blacknum, flag);}private:node* root = nullptr;
};myset.h
#include"rbt.h"
namespace zone
{template<class K>class set{public:struct setkeyoft //仿函数,用来取出红黑树节点data中的key{const K& operator()(const K& key){return key;}};//set这里的迭代器本质都是const_iterator,因为k要求无法修改typedef typename RBTtree<K, K, setkeyoft>::const_iterator iterator;//记得要使用typename告诉编译器RBTtree<K, K, setkeyoft>::iterator这个是类型,不是函数typedef typename RBTtree<K, K, setkeyoft>::const_iterator const_iterator;iterator begin()const{return it.begin();}iterator end()const{return it.end();}pair<iterator,bool> insert(const K& key){return it.insert(key);}void inorder(){it.inorder();}private:RBTtree<K,K,setkeyoft> it;};
}
mymap.h
#include"rbt.h"
namespace zone
{template<class K,class T>class map{public:struct setkeyoft{const K& operator()(const pair<K, T>& key){return key.first;}};//map这里的迭代器则使用的是iterator,因为k要求无法修改,但v可以修改,所以可以直接初始化时用pair<const K, T>typedef typename RBTtree<K, pair<const K, T>, setkeyoft>::iterator iterator;typedef typename RBTtree<K, pair<const K, T>, setkeyoft>::const_iterator const_iterator;pair<iterator, bool> insert(const pair<K, T>& key){return it.insert(key);}T& operator[](const K& key){pair<iterator, bool>ret = insert(make_pair(key,T()));//insert返回一个pair,first是iterator,second是bool类型return ret.first->second;}iterator begin(){return it.begin();}iterator end(){return it.end();}void inorder(){it.inorder();}private:RBTtree<K,pair<const K,T>, setkeyoft> it;};
}test.cpp
#include<iostream>
#include<vector>
#include<string>using namespace std;#include"myset.h"
#include"mymap.h"void test1()
{zone::set<int> it;it.insert(1);it.insert(3);it.insert(5);it.insert(2);it.insert(4);zone::set<int>::iterator arr = it.begin();while (arr!=it.end() ){cout << *arr << " ";++arr;}//it.inorder();}void test2()
{zone::map<string,string> it;it.insert(make_pair("sort","排序"));it.insert(make_pair("right", "右"));it.insert(make_pair("left", "左"));it.insert(make_pair("middle", "中"));zone::map<string,string>::iterator arr = it.begin();while (arr != it.end()){arr->second += 'x';//map的v可修改cout << arr->first << " ";++arr;}//it.inorder();}void test3()
{string arr[] = { "香蕉","苹果","西瓜","苹果","苹果","西瓜","苹果"};zone::map<string, int> it;for (auto e : arr){it[e]++;}for (auto k : it){++k.second;cout << k.first << ":" << k.second << endl;}
}
int main()
{test3();return 0;
}相关文章:
移情别恋c++ ദ്ദി˶ー̀֊ー́ ) ——13.mapset(模拟实现)
1.对红黑树进行改造 1.1treenode模板参数改变 之前构建treenode模板参数传的是class k,class v(set为k,k;map是k,v),现在直接用T代替 template<class T> //这里直接传了T作为模板参数,T可能是pai…...

【C++】多态(下)
个人主页~ 多态(上)~ 多态 四、多态的原理1、虚表的存储位置2、多态的原理3、动态绑定和静态绑定 五、单继承和多继承关系的虚函数表1、单继承中的虚函数表2、多继承中的虚函数表 六、多态中的一些小tips 四、多态的原理 1、虚表的存储位置 class A {…...
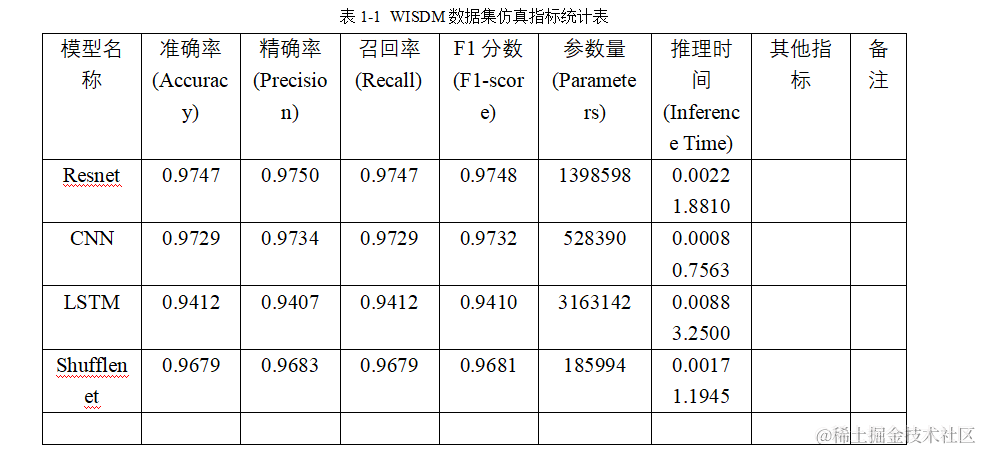
基于四种网络结构的WISDM数据集仿真及对比:Resnet、LSTM、Shufflenet及CNN
在上节中,我们已经详细介绍了WISDM数据集及如何使用CNN网络训练,得到了六个维度的模型仿真指标及五个维度的可视化分析,那么现在我们将训练模型推广到其他网路结构中去,通过仿真实验来对比一下不同网络之间对于WISDM数据集的训练效…...

【蚂蚁HR-注册/登录安全分析报告】
前言 由于网站注册入口容易被黑客攻击,存在如下安全问题: 暴力破解密码,造成用户信息泄露短信盗刷的安全问题,影响业务及导致用户投诉带来经济损失,尤其是后付费客户,风险巨大,造成亏损无底洞…...

【分布式微服务云原生】详解Redis的主从模式,主服务器挂了如何从多个从服务器选出新的主服务器
深入探索Redis主从模式:架构、故障转移与最佳实践 摘要: 本文深入探讨了Redis的主从复制模式,包括其工作原理、故障转移机制以及如何配置和管理这一模式。文章通过清晰的结构和实例代码,帮助读者理解如何在实际项目中应用Redis主…...

Android Context是什么?有很多的context他们之间有什么区别?什么时候该使用哪个?
目录 一、Context是什么? 在Android中,Context是一个抽象类 ,它代表了应用程序的当前状态,包括资源和类加载器等,它提供了一个应用运行所需的信息,比如我们要获取资源 ,那么需要她,…...

数字解调同步技术
一些概念 载波同步 载波同步是一个过程,通过该过程,接收机使其本地载波振荡器的频率和相位与接收信号的频率和相位相适应。 载波相位同步 Carrier Phase Synchronization载波频率同步 Carrier Frequency Synchronization 帧同步 待更新 位同步 待…...

k8s搭建一主三从的mysql8集群---无坑
一,环境准备 1.1 k8s集群服务器 ip角色系统主机名cpumem192.168.40.129mastercentos7.9k8smaster48192.168.40.130node1centos7.9k8snode148192.168.40.131node2centos7.9k8snode248192.168.40.132node3centos7.9k8snode348 k8s集群操作请参考《K8s安装部署&…...

Oracle架构之物理存储中各种文件详解
文章目录 1 物理存储1.1 简介1.2 数据文件(data files)1.2.1 定义1.2.2 分类1.2.2.1 系统数据文件1.2.2.2 撤销数据文件1.2.2.3 用户数据文件1.2.2.4 临时数据文件 1.3 控制文件(Control files)1.3.1 定义1.3.2 查看控制文件1.3.3…...

AR 领域的突破——微型化显示屏为主流 AR 眼镜铺平道路
概述 多年来,增强现实 (AR) 技术一直吸引着人们的想象力,有望将数字信息与我们的物理世界无缝融合。通过将计算机生成的图像叠加到现实世界的视图上,AR 有可能彻底改变我们与环境的互动方式。从增强游戏体验到协助手术室的外科医生ÿ…...

Web安全 - 构建全面的业务安全保护防御体系
文章目录 业务安全概述业务安全 vs. 基础安全业务安全的防护业务安全的防护策略1. 用户资源对抗的技术实现与优化2. IP资源对抗的技术实现与优化3. 设备资源对抗的技术实现与优化4. 操作资源对抗的技术实现与优化实际应用场景中的策略 典型场景业务场景 1:新用户注册…...
:机器学习的相关术语)
机器学习(2):机器学习的相关术语
场景示例: 你周日约了小李、老王打牌,小李先来了,老王没来。你想打电话叫老王过来。小李说:“你别打电话啦,昨天老王喜欢的球队皇马输球了,他的项目在上个礼拜也没成功上线,再加上他儿子期末考…...

Leecode热题100-75.颜色分类
给定一个包含红色、白色和蓝色、共 n 个元素的数组 nums ,原地 对它们进行排序,使得相同颜色的元素相邻,并按照红色、白色、蓝色顺序排列。 我们使用整数 0、 1 和 2 分别表示红色、白色和蓝色。 必须在不使用库内置的 sort 函数的情况下解…...

408算法题leetcode--第22天
200. 岛屿数量 200. 岛屿数量时间:O(mn);空间:O(min(m, n)),队列最大入队个数,可以想象从左上到右下,第一次入队1个,第二次出队1,入队2,第三次出队2,入队3……...

dubbo微服务
一.启动nacos和redis 1.虚拟机查看是否开启nacos和redis docker ps2.查看是否安装nacos和redis docker ps -a3.启动nacos和redis docker start nacos docker start redis-6379 docker ps二.创建三个idea的maven项目 1.第一个项目dubboapidemo 2.1.1向pom.xml里添加依赖 …...

如何在 DAX 中计算多个周期的移动平均线
在 DAX 中计算移动聚合很容易。但是,计算一段时间内的移动平均值时会有一些陷阱。由于其中一些陷阱是定义问题,因此我们必须小心,不要选择错误的方法。让我们看看细节。欢迎来到雲闪世界。 添加图片注释,不超过 140 字(…...

微信小程序 图片的上传
错误示范 /*从相册中选择文件 微信小程序*/chooseImage(){wx.chooseMedia({count: 9,mediaType: [image],sourceType: [album],success(res) {wx.request({url:"发送的端口占位符",data:res.tempFiles[0].tempFilePath,method:POST,success(res){//请求成功后应该返…...

软件测试人员发现更多程序bug
软件测试人员发现更多程序bug 1. 理解需求和业务,需求评审时候发现bug 熟悉了产品的业务流程、才能迅速找出软件中存在的一些重要的缺陷,发现的软件缺陷才是有价值的。否则即使你能找到一些软件缺陷,那也是纯软件的缺陷,价值不大…...

Nagle 算法:优化 TCP 网络中小数据包的传输
1. 前言 在网络通信中,TCP(传输控制协议)是最常用的协议之一,广泛应用于各种网络应用,如网页浏览、文件传输和在线游戏等。然而,随着互联网的普及,小数据包的频繁传输成为一个不容忽视的问题。…...
C#入门教程
目录 1.if分支语句 2.面向对象 3.static简单说明 1.if分支语句 我们的这个C#里面的if语句以及这个if-else语句和C语言里面没有区别,就是打这个输出上面的方式不一样,c#里面使用的是这个console.writeline这个指令,其他的这个判断逻辑都是一…...

天线设计基础:核心指标与工程实践解析
1. 天线设计基础与核心指标解析天线作为无线通信系统的"门户",其性能优劣直接决定了整个系统的通信质量。在开始具体设计前,我们需要明确几个核心性能指标及其相互关系。1.1 增益与通信距离的定量关系天线增益本质上描述的是电磁能量在特定方向…...
)
从劝退到离不开:Vim新手入门实战博客(附高效技巧)
文章目录前言💙一、vim是什么?💜二、为什么要学习vim?💚三、vim总览💔四、vim的基本操作4.1vim正常模式命令集(命令模式)4.2vim底行模式命令集4.3vim视图模式💗五、一些小技巧💖六、…...

AI代码库分析:用大模型自动生成项目教程与架构图
1. 项目概述:用AI将陌生代码库变成你的专属教程 你有没有过这样的经历?接手一个新项目,或者想学习一个热门的开源库,打开GitHub仓库,面对成百上千个文件、错综复杂的目录结构,瞬间感觉无从下手。README.md可…...

从零构建趣味AI应用:技术架构、核心实现与部署实战
1. 项目概述与核心价值最近在GitHub上看到一个挺有意思的项目,叫miaoquai,作者是jingchang0623。光看这个名字,可能有点摸不着头脑,但点进去一看,发现这是一个关于“喵趣AI”的开源项目。作为一个在AI应用和开源社区混…...

DownKyi终极指南:简单快速获取B站8K超高清视频的完整解决方案
DownKyi终极指南:简单快速获取B站8K超高清视频的完整解决方案 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等…...

ZimaOS Blue:本地优先AI代理运行时,打造私有化智能助手
1. 项目概述:ZimaOS Blue,一个为“大胆构建者”准备的本地优先AI代理运行时 如果你和我一样,对当前AI应用生态里那些动辄需要联网、依赖特定云服务、数据隐私存疑的“智能助手”感到厌倦,同时又渴望一个能真正运行在自己设备上、…...

终极指南:5分钟免费解锁Cursor Pro全部功能的完整解决方案
终极指南:5分钟免费解锁Cursor Pro全部功能的完整解决方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your…...

声明式数据转换利器:Refiner 实战指南与架构集成
1. 项目概述与核心价值最近在折腾一个老项目的数据清洗和转换,被一堆格式混乱、结构不一的JSON文件搞得焦头烂额。手动写脚本处理吧,每次需求一变就得重写,维护成本太高;用现成的ETL工具吧,又觉得过于笨重,…...

物联网超低功耗设计:从睡眠优先到能量自治的十年续航之道
1. 项目概述:让物联网节点运行数十年的设计哲学如果你正在部署一个大规模的物联网网络,无论是智慧城市的数千个路灯传感器,还是遍布数公里农田的环境监测节点,最让你头疼的问题恐怕不是通信协议,也不是数据处理&#x…...

Kali on WSL避坑大全:从换源、装工具到解决图形界面Terminal报错,一篇搞定
Kali on WSL实战避坑指南:从基础配置到图形界面全流程解决方案 在Windows系统上运行Kali Linux一直是安全研究人员和开发者的刚需,而WSL(Windows Subsystem for Linux)的出现让这一需求变得更加便捷。然而,从安装到真正…...