六自由度平台
力姆泰克六自由度平台
安装方便,维护简单 多重机械电气安全保护
向下翻动查看更多+

力姆泰克伺服系统集成
全新革命性结构设计与六轴先进伺服控制原理的结合,力姆泰克公司引进国外的专业技术在国内全新推出 全电动六自由度平台。将完全替代市场上原有的液压六自由度平台,避免了大型液压泵站,管道,阀门等复 杂系统。
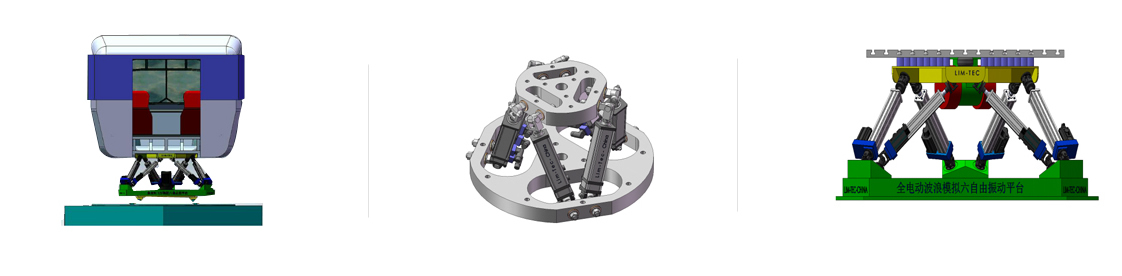
力姆泰克六自由度平台分为两大系列:动感仿真六自由度平台D6B系列,精密定位六自由度平台W6B系列
动感仿真六自由度平台D6B 系列的有效载荷范围为0.5吨-20吨,高逼真仿真动感平台通过与高性能视觉仿真 对接,可以广泛应用在各种训练模拟器如飞行模拟器、舰艇模拟器、海军直升机起降模拟平台、坦克模拟器 、汽车驾驶模拟器、火车驾驶模拟器、地震模拟器以及动感电影、娱乐设备等领域!
精密定位六自由度平台W6B系列的有效载荷为0.5吨-50吨,位置控制精度达到0.02mm,外配激光对直仪可以达 到更高精度0.01mm。可以广泛应用在各种汽车姿态测试设备,飞机/导弹等飞行器飞行姿态测试设备等精密测 试多自由度平台,以及空间宇宙飞船的对接,空中加油机的加油对接,飞机整机装配, 卫星装配等。
我们专业的技术团队可以按照客户的各种特殊的要求,提供不同特性参数的2/3/4/5/6/7自由度平台。我们为 您提供成套系统的服务:售前技术咨询,方案设计,售后安装调试,全程技术答疑,24小时快速响应等优质 服务。

产品特点:
为增强仿真的真实感而有的高性能动感提示性 能;
全数字化闭环伺服控制,专业运动控制卡保证运 动的平滑过渡以及高仿真性,减少动感漂移和失 真。
全新的模块化组合及自由灵活的系统集成, 满足 客户不同需求
高精密传动系统及优化组合, 保证系统的高效率 达到85%
安装方便,维护简单 多重机械电气安全保护, 保证设备的绝对安全
系统高响应时间及高加速度及低噪音
可视性友好人机界面,操作简单
动感仿真六自由度平台D6B系列参数规格
| 型号 | D6B-800KG | D6B-2000KG | D6B-3000KG | D6B-5000KG | D6R-10000KG | D6R-15000KG | D6R-20000KG |
| 传动丝杠种类 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 行星丝杠 | 行星丝杠 | 行星丝杠 |
| 单自由度最大偏移量 | |||||||
| 垂直方向 | ±0.10m | ±0.40m | ±0.80m | ±1m | ±1.5m | ±1.5m | ±1.5m |
| 纵向方向 | ±0.10m | ±0.40m | ±0.80m | ±1m | ±1.5m | ±1.5m | ±1.5m |
| 侧向方向 | ±0.10m | ±0.40m | ±0.80m | ±1m | ±1.5m | ±1.5m | ±1.5m |
| 俯仰角度 | ±10 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 |
| 滚转角度 | ±10 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 |
| 偏航角度 | ±10 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 |
| 单自由度最大速度 | |||||||
| 垂直方向 | ±0.45m/s | ±0.30m/s | ±0.45m/s | ±0.45m/s | ±1m/s | ±1m/s | ±1m/s |
| 纵向方向 | ±0.45m/s | ±0.30m/s | ±0.45m/s | ±0.45m/s | ±1m/s | ±1m/s | ±1m/s |
| 侧向方向 | ±0.45m/s | ±0.30m/s | ±0.45m/s | ±0.45m/s | ±1m/s | ±1m/s | ±1m/s |
| 俯仰角度 | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s |
| 滚转角度 | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s |
| 偏航角度 | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s |
| 单自由度最大加速度 | |||||||
| 垂直方向 | ±5.0m/s 2 | ±7.0m/s 2 | ±8.0m/s 2 | ±8.0m/s 2 | ±9.8m/s 2 | ±9.8m/s 2 | ±9.8m/s 2 |
| 纵向方向 | ±5.0m/s 2 | ±7.0m/s 2 | ±8.0m/s 2 | ±8.0m/s 2 | ±9.8m/s 2 | ±9.8m/s 2 | ±9.8m/s 2 |
| 侧向方向 | ±5.0m/s 2 | ±7.0m/s 2 | ±8.0m/s 2 | ±8.0m/s 2 | ±9.8m/s 2 | ±9.8m/s 2 | ±9.8m/s 2 |
| 俯仰角度 | ±400 0/s2 | ±200 0/s2 | ±200 0/s2 | ±150 0/s2 | ±150 0/s2 | ±150 0/s2 | ±150 0/s2 |
| 滚转角度 | ±400 0/s2 | ±200 0/s2 | ±200 0/s2 | ±150 0/s2 | ±150 0/s2 | ±150 0/s2 | ±150 0/s2 |
| 偏航角度 | ±400 0/s2 | ±200 0/s2 | ±200 0/s2 | ±150 0/s2 | ±150 0/s2 | ±150 0/s2 | ±150 0/s2 |
| 最大有效负载 | 800kg | 2000kg | 3000kg | 5000kg | 10000kg | 15000kg | 20000kg |
| 运动平台X轴惯量 | 700kg.m 2 | 3500kg.m 2 | 5500kg.m 2 | 18000kg.m 2 | 40000kg.m2 | 60000kg.m2 | 120000kg.m2 |
| 运动平台Y轴惯量 | 700kg.m 2 | 3500kg.m 2 | 5500kg.m 2 | 18000kg.m 2 | 40000kg.m2 | 60000kg.m2 | 120000kg.m2 |
| 运动平台Z轴惯量 | 700kg.m 2 | 3500kg.m 2 | 5500kg.m 2 | 18000kg.m 2 | 40000kg.m2 | 60000kg.m2 | 120000kg.m2 |
| 运动平台的重心高度 | 约0.6m | 约1m | 约1m | 约1m | 约1.8m | 约1.8m | 约1.8m |
| 运动平台的总高度 | 约2.5m | 约3m | 约4m | 约5m | 约7m | 约7.5m | 约7.5m |
| 电源 | 220V 50HZ | 380V 50HZ | 380V 50HZ | 380V 50HZ | 380V 50HZ | 380V 50HZ | 380V 50HZ |
| 系统平均功率 | 4KW | 5KW | 6KW | 9KW | 11KW | 20KW | 30KW |
| 系统峰值功率 | 20KW | 30KW | 30KW | 30KW | 50KW | 70KW | 60KW |
精密定位六自由度平台W6B系列参数规格
| 型号 | W6B-800KG | W6B-2000KG | W6B-3000KG | D6B-5000KG | W6R-10000KG | W6R-15000KG | W6R-20000KG |
| 传动丝杠种类 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 滚珠丝杠 | 行星丝杠 | 行星丝杠 | 行星丝杠 |
| 单自由度最大偏移量 | |||||||
| 垂直方向 | ±0.10m | ±0.40m | ±0.80m | ±1m | ±1.5m | ±1.5m | ±1.5m |
| 纵向方向 | ±0.10m | ±0.40m | ±0.80m | ±1m | ±1.5m | ±1.5m | ±1.5m |
| 侧向方向 | ±0.10m | ±0.40m | ±0.80m | ±1m | ±1.5m | ±1.5m | ±1.5m |
| 俯仰角度 | ±10 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 |
| 滚转角度 | ±10 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 |
| 偏航角度 | ±10 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 | ±25 0 |
| 单自由度最大速度 | |||||||
| 垂直方向 | ±0.45m/s | ±0.30m/s | ±0.45m/s | ±0.45m/s | ±1m/s | ±1m/s | ±1m/s |
| 纵向方向 | ±0.45m/s | ±0.30m/s | ±0.45m/s | ±0.45m/s | ±1m/s | ±1m/s | ±1m/s |
| 侧向方向 | ±0.45m/s | ±0.30m/s | ±0.45m/s | ±0.45m/s | ±1m/s | ±1m/s | ±1m/s |
| 俯仰角度 | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s |
| 滚转角度 | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s |
| 偏航角度 | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s | ±30 0/s |
| 单自由度最大加速度 | |||||||
| 垂直方向 | 0.02mm | 0.02mm | 0.02mm | 0.03mm | 0.03mm | 0.03mm | 0.03mm |
| 纵向方向 | 0.02mm | 0.02mm | 0.02mm | 0.03mm | 0.03mm | 0.03mm | 0.03mm |
| 侧向方向 | 0.02mm | 0.02mm | 0.02mm | 0.03mm | 0.03mm | 0.03mm | 0.03mm |
| 俯仰角度 | ±10弧分 | ±10弧分 | ±15弧分 | ±15弧分 | ±15弧分 | ±15弧分 | ±15弧分 |
| 滚转角度 | ±10弧分 | ±10弧分 | ±15弧分 | ±15弧分 | ±15弧分 | ±15弧分 | ±15弧分 |
| 偏航角度 | ±10弧分 | ±10弧分 | ±15弧分 | ±15弧分 | ±15弧分 | ±15弧分 | ±15弧分 |
| 最大有效负载 | 800kg | 2000kg | 3000kg | 5000kg | 10000kg | 15000kg | 20000kg |
六自由度运动模拟器系统组成:
运动平台控制系统
包含:特制双开门控制柜,工控机, 运动控制卡,伺服驱动器及布线,触 摸屏等。菜单式模块化人机界面,可 以清楚设置部分参数,内含多项电气 控制保护程序,保持良好的与主机的 快速通讯,内置运动能源优化分配系 统,提高能源使用效率,降低能耗。
视景仿真系统
三个42寸显示器或者环幕投影等视景 系统,达到真实的视觉效果。匹配高 保真音响系统,如驾驶身临其境。
伺服电动缸
6台伺服电动缸为运动平台提供六种运 动方式,使用最新的技术使用绝对编 码器,缸体极限位置缓冲系统,先进 的伺服控制系统使6个伺服缸按照设定。

轨迹运动,实现平滑运动,保证高保真效果的关键。内置限位开关系统保证极限安全。伺服电机匹配制动器保证意外时的及 时停止。电机与缸体之间可以同步带平行安装,特殊进口高强度同步带,终身免维护;可以选择电机与缸体之间直线连轴器 安装方式,保证更高的动态响应时间。
上下平台虎克铰接
高精密加工虎克铰接,保证系统的位置精密度和运动平滑无间隙,有限元分析保证虎克铰接及销轴的安全性,维护成本低。
上下工作平台
根据客户订制的特殊上下平台,有限元分析保证足够的强度,上平台可以增加旋转平台,增加到7自由度。
相关文章:
六自由度平台
力姆泰克六自由度平台 安装方便,维护简单 多重机械电气安全保护 向下翻动查看更多 力姆泰克伺服系统集成 全新革命性结构设计与六轴先进伺服控制原理的结合,力姆泰克公司引进国外的专业技术在国内全新推出 全电动六自由度平台。将完全替代市场上原有的…...

【Node.js 下载及npm安装配置】亲测可用
Node.js 下载及npm安装配置 安装nodejs设置安装angular 安装nodejs 下载适用自己系统的node.js,官网:https://nodejs.cn/download/。默认安装即可。查看是否安装成功,node -v,npm -v ,出现版本号即安装成功。 设置 …...

Qt C++设计模式->访问者模式
访问者模式(Visitor Pattern)是一种行为型设计模式,它将操作与对象结构分离,使得你可以在不改变对象结构的前提下定义作用于这些对象的新操作。访问者模式通过引入一个访问者对象,允许你在不修改类的前提下向已有类添加…...

手机在网状态的详细应用场景有哪些?
手机在网状态的详细应用场景涵盖了多个行业和领域,以下是一些具体的例子: 金融行业 风控审核:银行、贷款公司等金融机构在审批贷款或信用卡时,可以通过查询手机在网状态来验证申请人的手机号码是否真实有效,从而降低欺…...

Linux的kafka安装部署
1.kafka是一个分布式的,去中心化的,高吞吐低延迟,订阅模式的消息队列系统 确保要有jdk与zookeeper安装配置 2.下载kafka安装包 http://archive.apache.org/dist/kafka/2.4.1/kafka_2.12-2.4.1.tgz 此时可以wget http://archive.apache.org/dist/kafka/2.4.1/kafka_2.12-2.4.…...

docker部署虚拟机
创建新的容器web02,-v表示目录映射,-p时端口映射,把宿主机目录挂载到容器中 docker run -itd -p 80:80 -v /data/webapps/www/:/usr/share/nginx/html/ --nameweb02 nginx:latest 此时我们在发布网站时只需要放在宿主机的目录里就可以了 解…...

如何用ChatGPT 8小时写出一篇完整论文(附完整提示词)
今天教大家如何利用ChatGPT完成一篇完整的论文。只需要一个标题,剩下全部由ChatGPT完成。总耗时8小时。 阅前提醒: 1.适用人群:这个方法适合应付简单的学术任务,比如日常小论文或投稿一般期刊。但如果你要写高水平的论文…...

AWS MySQL 升级(三)—— TAZ - 近0停机的小版本升级方案
与AWS交流了解到的新方案,没有实际试过,所以本篇主要是些原理 一、 TAZ的含义 TAZ实际上就是 3 AZ,扩展一些就是 Multi-AZ DB Cluster,即在3个可用区部署DB,具备两个只读备用实例。 二、 TAZ的主要用途 1. 近0停机的小…...

Redis的应用以及Redis工具类的封装
在前后端分离的项目中,通过session和cookie的通信一般就失去效益了,即使这么做了也会产生著名的漏洞问题CSRF(Cross-site request forgery), 是一种挟制用户在当前已登录的Web应用程序上执行非本意的操作的攻击方法。因…...

E系列I/O模块在锂电装备制造系统的应用
为了满足电池生产线对稳定性和生产效率的严苛要求,ZLG致远电子推出高速I/O应用方案,它不仅稳定可靠,而且速度快,能够迅速响应生产需求。 锂电池的生产工艺较为复杂,大致分为三个主要阶段:极片制作、电芯制作…...

ElasticsearchClient入门指南
在本教程中,我们将探讨如何使用Elasticsearch的官方Java客户端 - ElasticsearchClient。这个强大的工具允许您的Java应用程序与Elasticsearch集群进行交互,执行各种操作,如索引文档、执行搜索查询等。 前提条件 在开始之前,确保您的项目中已经包含了必要的依赖。您可以通过Ma…...

软考中级笔记
上午题 二 程序设计语言 6′ 1、编译程序和解释程序 解释器:翻译源程序时不生成独立的目标程序。 解释程序和源程序要参与到程序的运行过程中。 编译器:翻译时将源程序翻译成独立保存的目标程序。 机器上运行的是与源程序等价的目标程序。 源程序和编…...
学习python自动化——pytest单元测试框架
一、什么是pytest 单元测试框架,unittest(python自带的),pytest(第三方库)。 用于编写测试用例、收集用例、执行用例、生成测试结果文件(html、xml) 1.1、安装pytest pip instal…...

定位、地图建立及管理合集
系列文章目录 提示:这里可以添加系列文章的所有文章的目录,目录需要自己手动添加 TODO:写完再整理 文章目录 系列文章目录前言机器人中常见的定位技术介绍一、直方图定位原理二、gnss、rtk定位原理三、【依赖二维激光雷达与全局地图的定位算法】amcl&am…...

uniAPP是否可以做php语言书写后端的前端开发?
UniAPP可以做PHP语言书写后端的前端开发。以下是关于这个问题的详细解答: 一、UniAPP与后端开发的关系 前后端分离:UniAPP作为一款跨平台开发框架,采用了前后端分离的开发模式。这意味着前端和后端的开发可以独立进行,互不影响。…...

柒拾伍- AI内容农场生产文章自动发布至公众号 (一)
一、内容农场 X AI 看过很多的新闻说 AI 产生 内容 污染网络,我也想试一下到底能污染成怎样。 然后为了编写爆款的内容,我选用这个 内容农场 的种子是来源于 微博热搜,让生长出来的垃圾文章更加火爆 涉及内容不能放 二、编写代码 关于代…...

java.util.function Function<T, R>
一、介绍 1、简介 Function<T, R> 是 Java 8 中的一个函数式接口,用于表示接受一个输入参数 T,并返回一个结果 R 的函数。Function接口中有一个抽象方法apply,用于定义函数的逻辑。Function接口通常用于将数据进行转换(处…...

Allegro在PCB上开槽的三种方法操作指导
Allegro如何在PCB上开槽的三种方法操作指导 当PCB有特殊设计要求的时候,需要在PCB上开槽,Allegro支持在PCB上开槽操作,具体操作如下 以下图为例,需要在这个板框中间开槽 开方形槽 选择shape add rect命令 画在Board Geometry-o…...

Docker:快速部署
docker安装: 安装Docker - 飞书云文档 (feishu.cn) docker命令解读 docker run -d \ > --name mysql \ > -p 33…...

如何指定this的值
1. 函数调用时指定 call -- 接收一个参数列表 apply -- 接收一个参数数组 2. 创建时指定this的值 bind -- 返回一个函数 传参方式与call相同 箭头函数 -- 其this值取决于上级作用域中的this值 <script>// 如何指定this的值// 1. 调用时指定this// 2. 创建时指定th…...
)
别再手动复制粘贴了!用poi-tl + Spring Boot自动生成带表格、二维码的Word领料单(附完整源码)
基于poi-tl的Spring Boot领料单自动化生成实战指南 在企业日常运营中,领料单这类标准化文档的生成往往占据大量重复性工作时间。传统的手工复制粘贴不仅效率低下,还容易出错。本文将介绍如何利用poi-tl这一强大的Word模板引擎,结合Spring Bo…...

5步实用指南:永久解锁Cursor Pro高级功能的完整解决方案
5步实用指南:永久解锁Cursor Pro高级功能的完整解决方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached your t…...

使用 TaoToken CLI 工具一键配置多开发环境接入参数
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用 TaoToken CLI 工具一键配置多开发环境接入参数 在团队协作或个人多项目开发中,为不同的 AI 应用工具配置 API 密钥…...
)
为什么你的Perplexity图标总返回404?深度逆向其图标CDN路由算法(附Python自动化探测脚本)
更多请点击: https://intelliparadigm.com 第一章:Perplexity图标资源搜索 Perplexity AI 官方未提供公开的图标资源包(如 SVG、Favicon 或 App Icon 套件),但开发者可通过合法合规方式获取其品牌视觉资产用于技术文档…...
)
「国内直连」Claude Code安装与API配置保姆级教程:从Node.js到调用,小白少踩坑(亲测跑通)
前言 国内用户最头疼的就是海外账号和网络问题,其实找对中转接口就能省不少事。 这篇文章把从Node.js安装到Claude Code启动的全流程整理清楚,用88api做接口中转(国内直连,不用翻墙),尽量让每个步骤都能照…...

性能优化必看:你的Unity粒子特效为什么这么卡?从ParticleSystem参数入手排查
Unity粒子特效性能优化实战指南:从参数调优到帧率提升 1. 粒子特效性能问题的根源剖析 在移动端和VR项目中,粒子特效往往是性能瓶颈的重灾区。一次性能审计中,某款手游的瀑布场景因未限制粒子最大数量,导致中端机型帧率骤降至18fp…...

RT-Thread Studio 2.x 保姆级教程:从新建工程到线程控制LED,新手避坑指南
RT-Thread Studio 2.2实战指南:从零构建线程控制LED的完整路径 第一次打开RT-Thread Studio 2.2时,那个现代化的深色界面确实让人眼前一亮,但随之而来的是一连串的疑问:如何为我的STM32F103C8T6开发板创建项目?线程和裸…...

无王无帝定乾坤,来自田间第一人 大道同行赴新程
无王无帝定乾坤,来自田间第一人。 ——题记一、旧世终章:王权尽头的暮色朝代崛起方式落幕原因秦铁血征伐暴政失心汉布衣起义外戚乱政唐门阀更迭藩镇割据……………… “千秋岁月流转,世道几经更迭,无数王朝踏着烽烟崛起࿰…...

Matlab 2020b隐藏技能:用Image Labeler制作自定义数据集,轻松喂给你的深度学习模型
Matlab 2020b图像标注实战:从零构建医学影像分割数据集 在医学影像分析领域,数据标注的质量直接决定了深度学习模型的性能上限。许多研究者花费大量时间调试模型结构,却忽略了最基础的数据准备环节。Matlab 2020b内置的Image Labeler工具&am…...

FanControl终极指南:5步打造Windows电脑静音散热系统
FanControl终极指南:5步打造Windows电脑静音散热系统 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/fa/…...