FreeRTOS工程创建,创建多任务程序,基于汇编对ARM架构的简单理解
FreeRTOS工程创建
下载STM32CubeMX尽量找网盘下载(只是建议,没有说官网不行)
1.创建 STM32CubeMX 工程


2.配置时钟



3.配置 FreeRTOS



4.生成 Keil MDK 的工程

(2)随后去同界面的“Code Generator”设置、生成工程:

5.问题
由于不同的STM32CubeMX,软件的版本可能不同,我在配置之后,打开Keil发现按照以上方法配置会报错,这可能是你所使用STM32CubeMX 版本不匹配所导致的,只要打开如图

找见Firmware Package Name and Version,之后尝试修改版本即可
创建多任务程序
(1)系统默认线程理解
- 在FreeRTOS微型操作系统中文件FreeRTOS.c存放着默认的线程代码
- FreeRTOS与RT-Thread都属于微型实时操作系统,但是他们的代码不通用,所以有一个对实时操作系统的一个进行分装的文件cmsis_os2.c进行分装他们,类似也有,例如oled有不同型号,所以也要有文件对他们进行封装,lcd.c文件
在FreeRTOS.c中

这段代码就是创建了一个默认的Thread
osThreadNew方法属于cmsis_os2.c的一个基于FreeRTOS的方法
osThreadId_t osThreadNew (osThreadFunc_t func, void *argument, const osThreadAttr_t *attr)
函数简介
osThreadNew 是一个用于创建新线程并将其添加到活动线程列表中的函数。
参数解析
func:线程函数的指针,这是线程启动后要执行的函数。(就是这个线程启动要执行的代码的函数的名字)
/* USER CODE END Header_StartDefaultTask */ void StartDefaultTask(void *argument) {/* USER CODE BEGIN StartDefaultTask *//* Infinite loop */LCD_Init();LCD_Clear();for(;;){//Led_Test();LCD_Test();//MPU6050_Test(); //DS18B20_Test();//DHT11_Test();//ActiveBuzzer_Test();//PassiveBuzzer_Test();//ColorLED_Test();//IRReceiver_Test();//IRSender_Test();//LightSensor_Test();//IRObstacle_Test();//SR04_Test();//W25Q64_Test();//RotaryEncoder_Test();//Motor_Test();//Key_Test();//UART_Test();}/* USER CODE END StartDefaultTask */ }/* Private application code --------------------------------------------------*/ /* USER CODE BEGIN Application *//* USER CODE END Application */argument:传递给线程函数的参数,可以是任何类型的指针,这个指针将在线程启动时作为参数传入(一般看需求)
attr:线程属性的指针。如果设置为 NULL,则会使用默认值创建线程。这些属性可能包括线程的优先级、栈大小等设置。
defaultTaskHandle = osThreadNew(StartDefaultTask, NULL, &defaultTask_attributes);osThreadNew函数的返回值实际上是一个osThreadId_t类型的值
&defaultTask_attributes返回的是结构体值
/* Definitions for defaultTask */ osThreadId_t defaultTaskHandle; const osThreadAttr_t defaultTask_attributes = {.name = "defaultTask",.stack_size = 128 * 4,.priority = (osPriority_t) osPriorityNormal, };返回值
osThreadId_t:返回新创建线程的 ID,以便其他函数可以引用这个线程。
如果创建失败,返回值将是 NULL,表示发生了错误。
总结
这个函数的目的是方便开发者创建多线程应用,允许用户指定线程的功能和参数,同时支持自定义线程属性
(2)自己创建一个线程
找见如图所示位置

BaseType_t xTaskCreate( TaskFunction_t pxTaskCode,const char * const pcName, /*lint !e971 Unqualified char types are allowed for strings and single characters only. */const configSTACK_DEPTH_TYPE usStackDepth,void * const pvParameters,UBaseType_t uxPriority,TaskHandle_t * const pxCreatedTask )参数解释
pxTaskCode:
- 类型:
TaskFunction_t- 描述:指向任务函数的指针,该函数包含任务的代码逻辑。
pcName:
- 类型:
const char * const- 描述:任务的名称,用于调试和识别任务。可以是任意字符串,但最好简短且有意义。
usStackDepth:
- 类型:
const configSTACK_DEPTH_TYPE- 描述:任务堆栈的深度,通常以堆栈大小(字)为单位。这个参数定义了任务可以使用的内存量。
pvParameters:
- 类型:
void * const- 描述:传递给任务的参数,可以是任何类型的指针。任务内可以通过这个参数获取相关数据。
uxPriority:
- 类型:
UBaseType_t- 描述:任务的优先级,数值越大,优先级越高。FreeRTOS 支持多个优先级。
pxCreatedTask:
- 类型:
TaskHandle_t * const- 描述:用于接收创建的任务的句柄,便于后续管理(如删除、挂起等)。
返回值
- 返回值类型:
BaseType_t- 描述:函数调用成功时返回
pdPASS,失败时返回errCOULD_NOT_ALLOCATE_REQUIRED_MEMORY等错误码。总结
这个函数的主要作用是创建一个新的任务,并为其分配堆栈空间和其他资源,以便在 FreeRTOS 环境中并发执行多个任务。
书写你的线程代码,找见位置

基于汇编对ARM架构的简单理解
1.汇编的简单学习
PUSH
在汇编语言中,PUSH指令用于将数据压入栈中。这是一个非常重要的操作,特别是在函数调用、保存寄存器值以及处理局部变量时。下面是关于PUSH指令的一些基本内容:
基本概念
- 栈:栈是一种后进先出(LIFO)的数据结构,通常用于临时存储数据。
- PUSH指令:将指定的值压入栈顶,并自动调整栈指针。
![]()
表示将r4到r7以及LR压入栈中,SP寄存器自动调整栈顶内容
MOV
- 基本功能:
MOV指令用于将数据从一个位置复制到另一个位置,可以是寄存器、内存或立即数。 - 语法:
MOV destination, source - 操作数类型:
- 可以是寄存器与寄存器之间的复制。
- 可以是寄存器与内存之间的复制。
- 可以是立即数与寄存器或内存之间的复制。
- 示例
-
MOV AX, 5 ; 将立即数5加载到AX寄存器 MOV BX, AX ; 将AX寄存器的值复制到BX寄存器
MOVS
- 基本功能:
MOVS指令用于在处理字符串时,将源地址指向的数据移动到目标地址。它通常用于复制字节、字或双字,常与ESI和EDI寄存器配合使用。 - 语法:
MOVSB,MOVSW,MOVSD - 操作数类型:
MOVSB:移动字节(8位)。MOVSW:移动字(16位)。MOVSD:移动双字(32位)。
- 自动更新指针:执行后,
ESI和EDI指针会自动增加,以准备下一个数据项的复制。 -
MOVSB ; 将ESI指向的字节复制到EDI指向的字节,并自动更新指针 MOVSW ; 将ESI指向的字复制到EDI指向的字 MOVSD ; 将ESI指向的双字复制到EDI指向的双字
MOV与MOVS区别
总结
-
用途不同:
MOV用于通用的数据传输。MOVS系列用于字符串或块数据的复制。
-
指针更新:
MOV不会自动更新任何指针。MOVS在操作后会自动更新ESI和EDI寄存器。
-
操作数类型:
MOV可以处理多种数据类型和操作数。MOVS专注于字节、字和双字的移动。
SUB
在汇编语言中,SUB 指令用于执行减法操作。它从一个操作数中减去另一个操作数,并将结果存储在第一个操作数中。以下是关于 SUB 指令的一些详细信息:
基本概念
- 功能:
SUB指令用于从第一个操作数中减去第二个操作数。 - 语法:
SUB destination, sourcedestination:要进行减法运算的目标位置(通常是寄存器或内存)。source:要减去的值(可以是寄存器、立即数或内存)。-
SUB AX, BX ; 将BX寄存器的值从AX寄存器中减去,结果存储在AX中
LDRD
LDRD 是一种汇编指令,通常用于 ARM 体系结构中。它的功能是从内存中加载双字(通常是 64 位或 32 位)到寄存器中。以下是关于 LDRD 指令的一些详细信息:
基本概念
- 功能:
LDRD从内存中加载两个连续的数据项到两个寄存器中。 - 语法:
LDRD destination1, destination2, [address]destination1和destination2是要加载数据的寄存器。[address]是内存地址,指向要加载的数据的起始位置。
LDRD R0, R1, [R2] ; 从R2指向的内存地址加载数据,R0加载低地址的数据,R1加载高地址的数据
ADD
ADD 是一种基本的汇编指令,用于执行加法操作。它通常用于将两个操作数相加,并将结果存储在指定的目标寄存器中。以下是关于 ADD 指令的一些详细信息:
基本概念
- 功能:
ADD将两个操作数相加,并将结果存储在第一个操作数中。 - 语法:
ADD destination, source1, source2destination:用于存储结果的寄存器或内存位置。source1和source2:要相加的两个操作数,可以是寄存器、立即数或内存。
ADD R0, R1, R2 ; 将R1和R2的值相加,结果存储在R0中
STR
STR 是一种汇编指令,主要用于将寄存器中的数据存储到内存中。以下是关于 STR 指令的一些详细信息:
基本概念
- 功能:
STR将一个寄存器的值存储到指定的内存地址。 - 语法:
STR source, [address]source:要存储的寄存器。[address]:目标内存地址,可以是直接地址或通过基址加偏移量计算得出。
STR R2, [R3, #4] ; 将寄存器R2中的值存储到R3指向的内存地址加上4的偏移量
POP
POP 是一种汇编指令,用于从栈中弹出数据并将其存储到指定的寄存器或内存位置。以下是关于 POP 指令的一些详细信息:
基本概念
- 功能:
POP从栈顶弹出一个值,并将其存储到指定的目标寄存器或内存地址中。 - 语法:
POP destinationdestination:要接收弹出值的寄存器或内存位置
POP {R1, R2, R3} ; 同时从栈中弹出值到寄存器 R1, R2 和 R3
2.volatile
volatile 关键字是一种类型修饰符,用它声明的类型变量表示可以被某些编译器未知的因素更改,比如:操作系统、硬件或者其它线程等。遇到这个关键字声明的变量,编译器对访问该变量的代码就不再进行优化,从而可以提供对特殊地址的稳定访问。声明时语法:int volatile vInt; 当要求使用 volatile 声明的变量的值的时候,系统总是重新从它所在的内存读取数据,即使它前面的指令刚刚从该处读取过数据。而且读取的数据立刻被保存。
底层栈区细节请看
3.ARM内部架构简单理解


执行的是以下代码
cnt = add(cnt, 1);
执行的是以下代码
int add(volatile int a, volatile int b) {volatile int sum;sum = a + b;return sum; }
这个是地址码
这个是地址码对应的数据(在Flash中)
这个是为人类设计的汇编代码







add函数代码汇编解析
int add(volatile int a, volatile int b)
{volatile int sum;sum = a + b;return sum;
}(1)PUSH {r0,r1,1r}
在栈区分配三个长度为4的内存空间分别为r0,r1,LR
sp这个地址在的栈区减12
(2)SUB sp,sp,#4
再分配一个空间用来存放sum
(3)LDRD r0,r1,[sp,#4]
读取(sp+4)地址以上的r0,r1的值
(4)ADD r0,r0,r1
r0=r0+r1;
(5)STR r0,[sp,#0]
将r0赋值给[sp+0]地址下的值sum
(6)POP {r1-r3,pc}
将LR寄存器指向的值给pc寄存器,返回r1,r2,r3
4.PC寄存器
程序计数器(PC,Program Counter)是CPU中的一个特殊寄存器,它的主要功能是存储下一条要执行的指令的地址。这样,CPU就能够知道接下来需要执行哪一条指令,从而保证程序的连续执行。在程序开始执行前,程序的首地址(即第一条指令所在的内存单元地址)会被送入PC。当执行指令时,CPU会自动修改PC的内容,使其始终指向将要执行的下一条指令的地址。大多数情况下,指令是顺序执行的,所以PC的值通常会自动递增,递增的量等于指令所含的字节数。当遇到转移指令时,下一条指令的地址将由转移指令的地址码字段来指定,而不是简单地通过递增PC的值来获取 。
在ARM架构中,程序计数器PC(R15)是唯一的,并且被所有模式共用。ARM处理器中使用R15作为PC,它总是指向取指单元。ARM处理器可以寻址4GB的地址空间,这是因为R15有32位宽度。在ARM状态下,R15的值总是能被4整除,也就是R15寄存器的最低2位总是0;而在Thumb状态下,R15的值总是能被2整除,也就是R15寄存器的最低位总是0 。
PC寄存器在计算机系统中扮演着重要的角色,它是CPU内部的重要组成部分,能够直接与CPU进行数据交换,提高数据的处理速度。同时,PC寄存器还可以协助CPU完成各种复杂的运算和控制操作,使得计算机系统能够高效、稳定地运行 。
在JVM(Java虚拟机)中,PC寄存器是对物理PC寄存器的一种抽象模拟。它用来存储指向下一条指令的地址,也即将要执行的指令代码。JVM中的PC寄存器是线程私有的,每个线程都有自己的程序计数器,它的生命周期与线程的生命周期保持一致。PC寄存器是程序控制流的指示灯,分支、循环、跳转、异常处理、线程恢复等基础功能都需要依赖这个计数器来完成 。
5.LR寄存器
在ARM架构中,LR(Link Register)是一个特殊的寄存器,其主要作用是存储子程序调用的返回地址。当执行函数调用指令(如BL,Branch and Link)时,LR寄存器会被自动设置为当前指令的下一条指令地址,即返回地址。这样,在函数执行完毕后,可以通过将LR寄存器的值复制到程序计数器PC来实现函数的返回,通常使用的指令是 MOV PC, LR 或者 BX LR 。
LR寄存器在异常处理中也扮演着重要角色。当异常发生时,异常模式的LR用来保存异常返回地址,即将当前的PC值保存到LR中,以便在异常处理程序结束后,能够通过LR寄存器恢复执行流,回到异常发生前的状态。
ARM处理器针对不同的模式,共有6个链接寄存器资源,其中用户模式和系统模式共用一个LR,每种异常模式都有各自专用的R14寄存器(LR)。这些链接寄存器分别为R14、R14_svc、R14_abt、R14_und、R14_irq、R14_fiq。程序设计者需要清晰地了解处理器的模式与相应寄存器的对应关系,因为不同模式下的R14不是同一个物理资源,其内容可能截然不同。
在ARMv8架构中,LR寄存器的功能被X30寄存器所取代。在ARM64模式下,X30用作链接寄存器,存储子程序调用的返回地址。
相关文章:
FreeRTOS工程创建,创建多任务程序,基于汇编对ARM架构的简单理解
FreeRTOS工程创建 下载STM32CubeMX尽量找网盘下载(只是建议,没有说官网不行) 1.创建 STM32CubeMX 工程 (1)双击运行 STM32CubeMX,在首页面选择“Access to MCU Selector”,如下图所示࿱…...

C++STL--------list
文章目录 一、list链表的使用1、迭代器2、头插、头删3、insert任意位置插入4、erase任意位置删除5、push_back 和 pop_back()6、emplace_back尾插7、swap交换链表8、reverse逆置9、merge归并10、unique去重11、remove删除指定的值12、splice把一个链表的结点转移个另一个链表13…...

M1 Mac打开Jupyter notebook
当我成功安装了Jupyter之后,发现无法通过 jupyter notebook 开始工作。 最初的问题是 zsh command not found 该问题是个路径问题,通过添加PATH环境变量就行了,设置环境变量时需要注意,zshrc和bash_profile中都可以设置&…...

docker 仓库之harbor详解
Harbor 是一个开源的企业级容器镜像仓库,由 VMware 提供。它基于 Docker 分布式应用程序框架构建,旨在解决企业对容器镜像存储、安全性和可管理性的需求。Harbor 提供了丰富的功能,包括用户权限管理、镜像复制、审计日志、漏洞扫描等…...

【环境变量】windons的Path
在 Windows 操作系统中,“Path” 是一个重要的环境变量,它定义了操作系统在执行命令时搜索可执行文件的目录。简而言之,当你在命令行(例如 cmd 或 PowerShell)中输入一个命令时,Windows 会查看 “Path” 环…...

go语言里的切片
package mainimport "fmt"func main() {// 创建一个长度为3,容量为5的整数切片var numbers make([]int, 3, 8)// 打印初始状态printSlice(numbers) // 输出: len3 cap5 slice[0 0 0]// 向切片添加元素numbers append(numbers, 1, 2)// 再次打印…...

革新你的智能体验:AIStarter 3.1.1正式版现已上线【安全认证】ai应用市场,数字人,ai绘画,ai视频,大模型,工作流因有尽有
在这个日新月异的技术时代里,人工智能(AI)正以前所未有的速度改变着我们的生活与工作方式。作为行业内的先锋之一,我们非常高兴地宣布:经过团队不懈努力以及严格的测试与优化后,AIStarter 3.1.1新版现已震撼…...
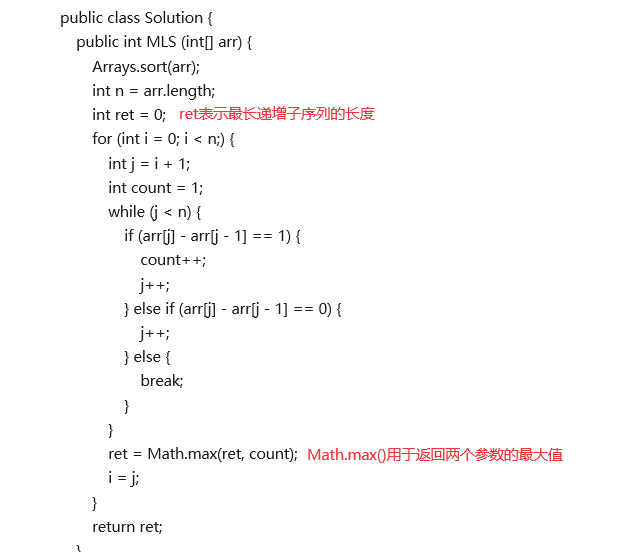
【练习17】数组中的最长连续子序列
数组中的最长连续子序列_牛客题霸_牛客网 (nowcoder.com) 题目分析:排序双指针 排序后,判断是否连续:后一个数-前一个数1 排序后,判断是否重复:后一个数-前一个数0 public class Solution {public int MLS (int[] arr)…...

2024 最适合 Web 开发者的 9 款 Chrome 扩展
随着 2024 年的进展,Chrome 扩展程序已成为 Web 开发人员工具包中不可或缺的一部分,在浏览器中提供强大的功能。在这篇文章中,我们将探讨今年在 Web 开发社区掀起波澜的 9 大 Chrome 扩展程序。 1.Lighthouse https://chromewebstore.google…...

React综合指南(二)
https://activity.csdn.net/creatActivity?id10787 #1024程序员节|征文# 21、 React中的状态是什么?它是如何使用的?? 状态是 React 组件的核心,是数据的来源,必须尽可能简单。基本上状态是确定组件呈现…...

XML\XXE漏洞基本原理
前言 欢迎来到我的博客 个人主页:北岭敲键盘的荒漠猫-CSDN博客 本文整理XXE漏洞的相应信息 XML与XXE漏洞 这个东西有许多叫法,XML漏洞与XXE漏洞差不多都是一个东西。 这个漏洞是出现在XMl上的,然后可以叫他XXE注入漏洞。 XML简介 XML是一种数据的传输…...

uniapp小程序自定义聚合点
注: 1.默认的聚合点可以点击自动展示子级点位,但是自定义的聚合点在ios上无法触发markerClusterClick的监听,至今未解决,不知啥原因 2.ios和安卓展示的点位样式还有有差别 源码附上 <template><view class"marke…...

Spring Boot在线考试系统:JavaWeb技术的应用案例
2相关技术 2.1 MYSQL数据库 MySQL是一个真正的多用户、多线程SQL数据库服务器。 是基于SQL的客户/服务器模式的关系数据库管理系统,它的有点有有功能强大、使用简单、管理方便、安全可靠性高、运行速度快、多线程、跨平台性、完全网络化、稳定性等,非常…...

Linux在服务器多节点下面如何快速查找日志
背景:最近在查找一个核心服务的后台日志,发现竟然部署了十几个节点,而且没使用ELK来做日志处理,所以查找日志非常不方便,不可能一个服务节点一个服务地找,所以通过同事间互相沟通找到一个方法,通…...
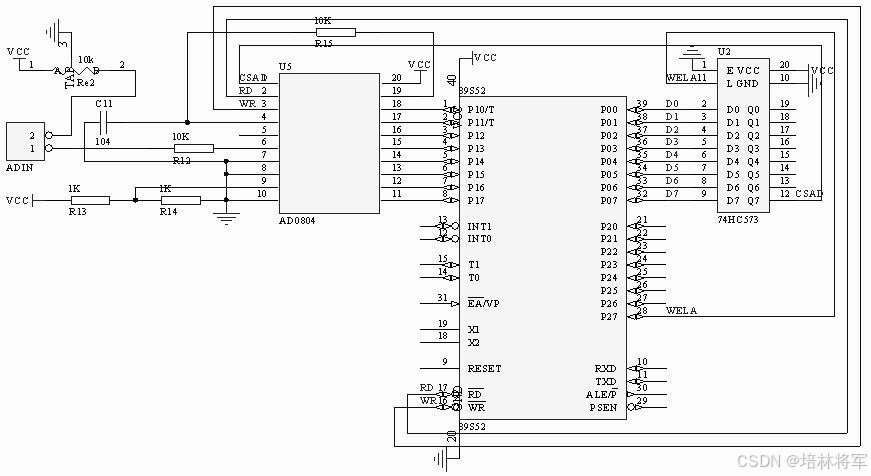
模数转换ADC0804的应用
【实验目的】 学习如何用单片机控制ADC0804芯片进行数模转换,掌握数码管动态扫描显示的原理。 【实验现象】 拧动AD旁边的电位器,会在数码管的前三位显示0-255之间的数值。 【实验说明】 动态扫描:就六位数码管显示123456举例说明如下&#x…...

CBAM中关于碳关税抵销
碳关税是欧盟为应对气候变化、防止 “碳泄漏” 而推出的一种边境调节机制。该机制的目的就是拉平进口产品与欧盟产品的碳成本,迫使其他国家建立碳市场或征收碳税,提高碳价,以达到和欧盟相同的水平,同时也有助于欧盟实现其气候目标…...

2.5 windows xp,ReactOS系统快速系统调用的实现
windows xp,ReactOS系统快速系统调用的实现 windows xp,ReactOS系统快速系统调用的实现 文章目录 **windows xp,ReactOS系统快速系统调用的实现**快速系统调用进入R0我们看MSR寄存器中的内容到底是啥子快速系统调用返回PspLookupKernelUserE…...

AI助力广交会,人工智能在制造业有哪些应用场景?
随着科技的飞速发展,人工智能(AI)正以前所未有的速度渗透到传统制造业中,为中国传统制造业注入了新的活力与变革,也为中国外贸的持续增长增添了更多底气。 在10月15日—19日举办的第136届中国进出口商品交易会上&…...

ElementPlus-Table表格-单选--TypeScript进阶篇
今天看个例子,这个例子是ElementPlus的组件Table表格下面的单选 <template> <el-table ref"singleTableRef" :data"tableData" highlight-current-row style"width: 100%" current-change"hand…...

三大智能体平台深度对比:字节Coze、百度AppBuilder、智谱智能体优劣解析
字节Coze智能体是一个多功能平台,具备丰富的功能和技能扩展能力。以下是它的一些核心功能和特性: 功能与技能 1. 插件功能 Coze智能体可以通过插件调用外部API,扩展智能体的能力。例如,它可以执行以下操作: 搜索信…...
)
手把手教你用VHDL在FPGA上解码IMX214 MIPI视频(基于MC20901 D-PHY,含6套工程源码)
基于VHDL的FPGA视频处理系统实战:从IMX214到高清显示 在嵌入式视觉系统开发中,FPGA因其并行处理能力和低延迟特性,成为视频采集与处理的理想平台。本文将深入探讨如何利用VHDL语言在Xilinx FPGA上构建完整的MIPI视频处理流水线,实…...

基于MYC-Y6ULX-V2核心板的工业运动控制系统实践
1. 项目概述:当工业运动控制遇上嵌入式核心板在工业自动化领域,运动控制系统是驱动设备精确执行动作的“大脑”和“神经中枢”。从数控机床的精密加工,到机器人的流畅轨迹,再到包装产线的快速分拣,其核心都依赖于一个稳…...

网络安全有哪些岗位?如何成为一名优秀的网络安全工程师?
网络安全有哪些岗位?如何成为一名优秀的网络安全工程师? 网络安全是什么? 首先说一下什么是网络安全?其中,网络安全工程师工作内容具体有哪些? 网络安全 确保网络系统的硬件、软件及其系统中的数据受到保护…...

量子计算如何革新机器翻译:QEDACVC系统解析
1. 量子计算与机器翻译的技术融合量子计算正在为自然语言处理领域带来革命性的变化。传统机器翻译系统依赖于经典计算机架构,如基于Transformer的模型,虽然取得了显著进展,但在处理低资源语言和实时多语言场景时仍面临挑战。量子机器翻译的核…...

城市生活垃圾焚烧过程参数的智能自主设定方法【附程序】
✨ 长期致力于城市生活垃圾、焚烧过程、智能自主、参数设定、设定方法软件研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)基于学习型伪度量方法的焚烧…...

3分钟掌握视频下载:VideoDownloadHelper免费插件完全指南
3分钟掌握视频下载:VideoDownloadHelper免费插件完全指南 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper 你是否曾经遇到过这样的…...

别再混淆了!一文理清华为云Stack里FusionStorage、OceanStor Pacific与存储服务的对应关系
华为云Stack存储产品演进史:从FusionStorage到OceanStor Pacific的技术脉络解析 在云计算基础设施领域,存储系统的命名规则往往反映了技术架构的迭代路径。华为云Stack作为企业级混合云解决方案,其存储产品线经历了多次重大技术革新与品牌整合…...

Perplexity搜索响应延迟突增2100ms?内部API调用链路拆解,开发者必看避坑清单
更多请点击: https://codechina.net 第一章:Perplexity搜索响应延迟突增2100ms?现象复现与影响定性 近期监控系统捕获到Perplexity搜索API端点( /v1/search)在UTC时间2024-06-12T08:14:22Z起出现持续约17分钟的P99延迟…...

C#从零开始学习笔记---第七天
不是同样的时间,不是同样的笔记,但是同样的作者。新的一天,欢迎收看我的学习笔记吼吼~我们昨天最后留了两道题,不知道大家做的怎么样,我现在来公布一下答案,但因为1000个人心里有1000个哈姆雷特,…...

Pwn题卡壳了?用LibcSearcher快速定位libc版本,附Python3安装与实战避坑指南
Pwn题卡壳了?用LibcSearcher快速定位libc版本,附Python3安装与实战避坑指南 在CTF竞赛和二进制安全研究中,Pwn题往往是最具挑战性的环节之一。当你在解题过程中成功泄露了某个libc函数的地址,却因为不知道目标系统的libc版本而无法…...