OB_GINS_day3
这里写目录标题
- 实现当前状态初始化
- 实现预积分的初始化
- 由于此时preintegration_options 是3(也就是考虑odo以及earth rotation)
- 为预积分的容器添加需要积分的IMU积分因子
- 接下来是添加新的IMU到preintegration中
实现当前状态初始化
这个state_curr的主要功能是初始化GNSS现在时刻的状态参数

实现预积分的初始化

由于此时preintegration_options 是3(也就是考虑odo以及earth rotation)
这里值的注意的问题在于:此时emplace_back的类是基于PreintegrationEarthOdo的类,所以在下面这个函数中,返回的preintegration最终是PreintegrationEarthOdo类型的变量
 注意:这里需要调用PreintegrationEarthOdo的类默认构造函数
注意:这里需要调用PreintegrationEarthOdo的类默认构造函数
这个默认构造函数
- 首先将初始的状态进行重置
resetState(current_state_, NUM_STATE);//NUM_STATE = 19;(此处不明白pn_代表什么)
函数iewn实现的主要功能是:地球自转角速度在n系上的投影
其中Earth::iewn()函数——是将基站的坐标(初始状态,以及在当地坐标中的位置)在局部坐标系转换成全局坐标系
将大地坐标系(BLH)转换为ECEF地心地固坐标系,
然后将地心地固坐标系ECEF0转换为导航坐标系CNE0(实现地心地固坐标系到导航系的转换)

这里导航系(n系——>e系)的转换矩阵


所以在OB_GINS中选取北东地坐标系为导航系

当前位置的local pos信息转换为在ECEF坐标系中的位置信息
Vector3d ecef1 = ecef0 + cn0e * local;
将在当地坐标系的位置信息转换到ECEF地心地固坐标系后,在转换成大地坐标系中
Vector3d blh1 = ecef2blh(ecef1);
下段代码的大致含义:
iewn_skew_ = Rotation::skewSymmetric(iewn_);
//这段代码目的是求出地球自转角速度的反对陈矩阵static Matrix3d skewSymmetric(const Vector3d &vector) {Matrix3d mat;mat << 0, -vector(2), vector(1), vector(2), 0, -vector(0), -vector(1), vector(0), 0;return mat;}
设置噪声矩阵
最终获得了global的全局坐标系

为预积分的容器添加需要积分的IMU积分因子
此时的back()是取出preintegrationlist的最后一个元素,然后向这个元素中加入NewImu
这个最后一个元素的类型是:std::shared_ptr
preintegrationlist的类型是PreintegrationBase类型

接下来是添加新的IMU到preintegration中

此时值得注意的问题在于:integrationrocess是一个重写的函数

最终执行的是PreintegrationEarthOdo——因为之前的preintegration返回的类型是PreintegrationEarthOdo类型的变量

这里需要明确——返回的类型是基类而非派生类,但是返回的变量的类型(preintegration)要定义为派生类类型
static std::shared_ptr<PreintegrationBase> creatPreintegration(const std::shared_ptr<IntegrationParameters> ¶meters, const IMU &imu0, const IntegrationState &state, PreintegrationOptions options)
{if (options == PREINTEGRATION_EARTH_ODO) {//最终执行这个if条件语句preintegration = std::make_shared<PreintegrationEarthOdo>(parameters, imu0, state);}return preintegration;
}这里先进行偏差补偿
void PreintegrationEarthOdo::integrationProcess(unsigned long index) {IMU imu_pre = compensationBias(imu_buffer_[index - 1]);IMU imu_cur = compensationBias(imu_buffer_[index]);// 区间时间累积double dt = imu_cur.dt;delta_time_ += dt;end_time_ = imu_cur.time;current_state_.time = imu_cur.time;// 连续状态积分, 先位置速度再姿态// 位置速度Vector3d dvfb = imu_cur.dvel + 0.5 * imu_cur.dtheta.cross(imu_cur.dvel) +1.0 / 12.0 * (imu_pre.dtheta.cross(imu_cur.dvel) + imu_pre.dvel.cross(imu_cur.dtheta));// 哥氏项和重力项Vector3d dv_cor_g = (gravity_ - 2.0 * iewn_.cross(current_state_.v)) * dt;// 地球自转补偿项, 省去了enwn项Vector3d dnn = -iewn_ * dt;Quaterniond qnn = Rotation::rotvec2quaternion(dnn);Vector3d dvel =0.5 * (Matrix3d::Identity() + qnn.toRotationMatrix()) * current_state_.q.toRotationMatrix() * dvfb + dv_cor_g;// 前后历元平均速度计算位置current_state_.p += dt * current_state_.v + 0.5 * dt * dvel;current_state_.v += dvel;// 缓存IMU时刻位置, 时间间隔为两个历元的间隔pn_.emplace_back(std::make_pair(dt, current_state_.p));// 姿态Vector3d dtheta = imu_cur.dtheta + 1.0 / 12.0 * imu_pre.dtheta.cross(imu_cur.dtheta);current_state_.q = qnn * current_state_.q * Rotation::rotvec2quaternion(dtheta);current_state_.q.normalize();// 预积分// 中间时刻的地球自转等效旋转矢量dnn = -(delta_time_ - 0.5 * dt) * iewn_;Matrix3d cbbe = (q0_.inverse() * Rotation::rotvec2quaternion(dnn) * q0_ * delta_state_.q).toRotationMatrix();// 里程增量//相比于earth 多了里程增量Vector3d dsodo = Vector3d(imu_cur.odovel, 0, 0);delta_state_.s += cbbe * (cvb_ * dsodo * (1 + delta_state_.sodo) -Rotation::rotvec2quaternion(imu_cur.dtheta).toRotationMatrix() * lodo_ + lodo_);// 前后历元平均速度计算位置dvel = cbbe * dvfb;delta_state_.p += dt * delta_state_.v + 0.5 * dt * dvel;delta_state_.v += dvel;// 姿态delta_state_.q *= Rotation::rotvec2quaternion(dtheta);delta_state_.q.normalize();// 更新系统状态雅克比和协方差矩阵updateJacobianAndCovariance(imu_pre, imu_cur);
}

相关文章:
OB_GINS_day3
这里写目录标题 实现当前状态初始化实现预积分的初始化由于此时preintegration_options 是3(也就是考虑odo以及earth rotation)为预积分的容器添加需要积分的IMU积分因子接下来是添加新的IMU到preintegration中 实现当前状态初始化 这个state_curr的主要…...

【Python3】【力扣题】405. 数字转换为十六进制数
【力扣题】题目描述: 题意理解:(不允许使用库函数) 数字等于0,则结果为0, 数字小于0,则补码运算,即最高位(32位)为1,其余全部取反,再加…...

记录一次企业外部通过ssh 连接数据库的事DBeaver
情况大概是这样,公司算法供应商开通了连接某个服务器A的权限,但是数据库x是在另一台服务器B上。 直接通过外部连接数据库是不行的,需要借用服务器A来进行访问x 使用软件:DBeaver, 数据库x类型:oracle 需要的信息&am…...

中聚企服:中聚AI女娲大模型,企业难题迎刃而解!
在这个瞬息万变的商业世界里,企业面临的挑战愈发复杂多样。小到日常文书和规章制度,大到工商财税和知识产权保护,每一个环节都至关重要。为了帮助中小企业在激烈的市场竞争中脱颖而出,中聚企服在官方小程序重磅上线了一款革命性产…...

对镜像精简
dive工具,用来优化镜像大小 ENV命令合并 ENV DEBUG_PORT8777 \HTTP_PORT12080 \PROGRAM_FILE_HOME_UPORTAL_CONF/home/zenap/uportal/confWORKDIR usr/src/app,会切换到这个目录 使用COPY --chown 修改属主,不要使用RUN chown 容器内非root…...

老电脑不能装纯净版windows
手上有一台2016年的老笔记本电脑,用了8年,基本上能换的都换了一遍,散热风扇换了,键盘换了,屏幕换了,扬声器也换了,内存也换大了,甚至都换过固态硬盘,但是CPU没法换&#…...

在Python中实现一个简单的社交媒体应用
在Python中实现一个简单的社交媒体应用 社交媒体应用是现代互联网的重要组成部分,允许用户分享信息、交流和互动。在这篇博文中,我们将使用Python构建一个简单的社交媒体应用,涵盖用户注册、发布动态、评论和查看动态等基本功能。我们将使用Flask框架作为后端,SQLite作为数…...

pytest高版本兼容test_data[“log“] = _handle_ansi(“\n“.join(logs))错误
一、问题现象: 执行seleniumpytest结束时报: INTERNALERROR> File "D:\workspace\pytestframe\.venv\Lib\site-packages\pytest_html\report_data.py", line 141, in add_test INTERNALERROR> test_data["log"] _handle_ansi(&q…...

Redis技术入门与实践指南
一、Redis基础知识 1、概念 Redis是一个开源的、遵循BSD协议的、基于内存的而且目前比较流行的键值数据库(key-value database),是一个非关系型数据库,redis 提供将内存通过网络远程共享的一种服务,提供类似功能的 还有memcached࿰…...
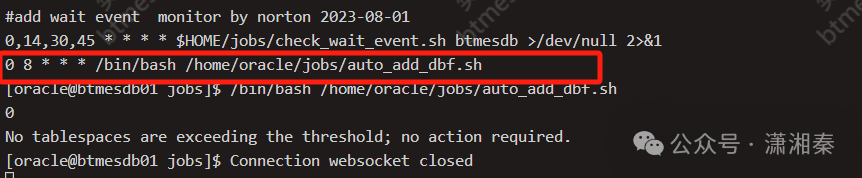
如何一键完成20个Oracle实例运维脚本部署
在日常的运维工作中,常常是一个人需要管理维护数个数十个数据库实例,如果是开源类集群如mysql,PG等可能更多;在没有商业的集中管理平台的情况下,如何快速的部署监控或者运维脚本,是一个值得探讨的问题&…...

【C++刷题】力扣-#598-区间加法 II
题目描述 给你一个 m x n 的矩阵 M和一个操作数组 op 。矩阵初始化时所有的单元格都为 0 。ops[i] [ai, bi] 意味着当所有的 0 < x < ai 和 0 < y < bi 时, M[x][y] 应该加 1。 在 执行完所有操作后 ,计算并返回 矩阵中最大整数的个数 。 示…...

优雅的LUA数据记录方法-serpent序列化+LUA Table
目录 简述如何集成?如何使用序列化 反序列化 参考 简述 项目里需要使用LUA脚本将数据记录到文件,要方便的增加、查找、删除,要方便的加载与存回。 使用序列化/反序列化 lua table可以很容易实现这些功能。 序列化将table转换为字符串 反序列…...

初始JavaEE篇——多线程(4):wait、notify,饿汉模式,懒汉模式,指令重排序
找往期文章包括但不限于本期文章中不懂的知识点: 个人主页:我要学编程(ಥ_ಥ)-CSDN博客 所属专栏:JavaEE 目录 wait、notify 方法 多线程练习 单例模式 饿汉模式 懒汉模式 指令重排序 wait、notify 方法 wait 和 我们前面学习的sleep…...
)
Apache Solr 身份认证绕过导致任意文件读取漏洞复现(CVE-2024-45216)
0x01 产品简介 Apache Solr是一个开源的搜索平台,基于流行的Apache Lucene库构建。它提供了一个强大的全文搜索功能,能够快速处理大量数据,并支持复杂的搜索操作。并且是一个独立的企业级搜索应用服务器,它采用Java开发,并基于Apache Lucene实现。Solr提供了类似于Web-Se…...
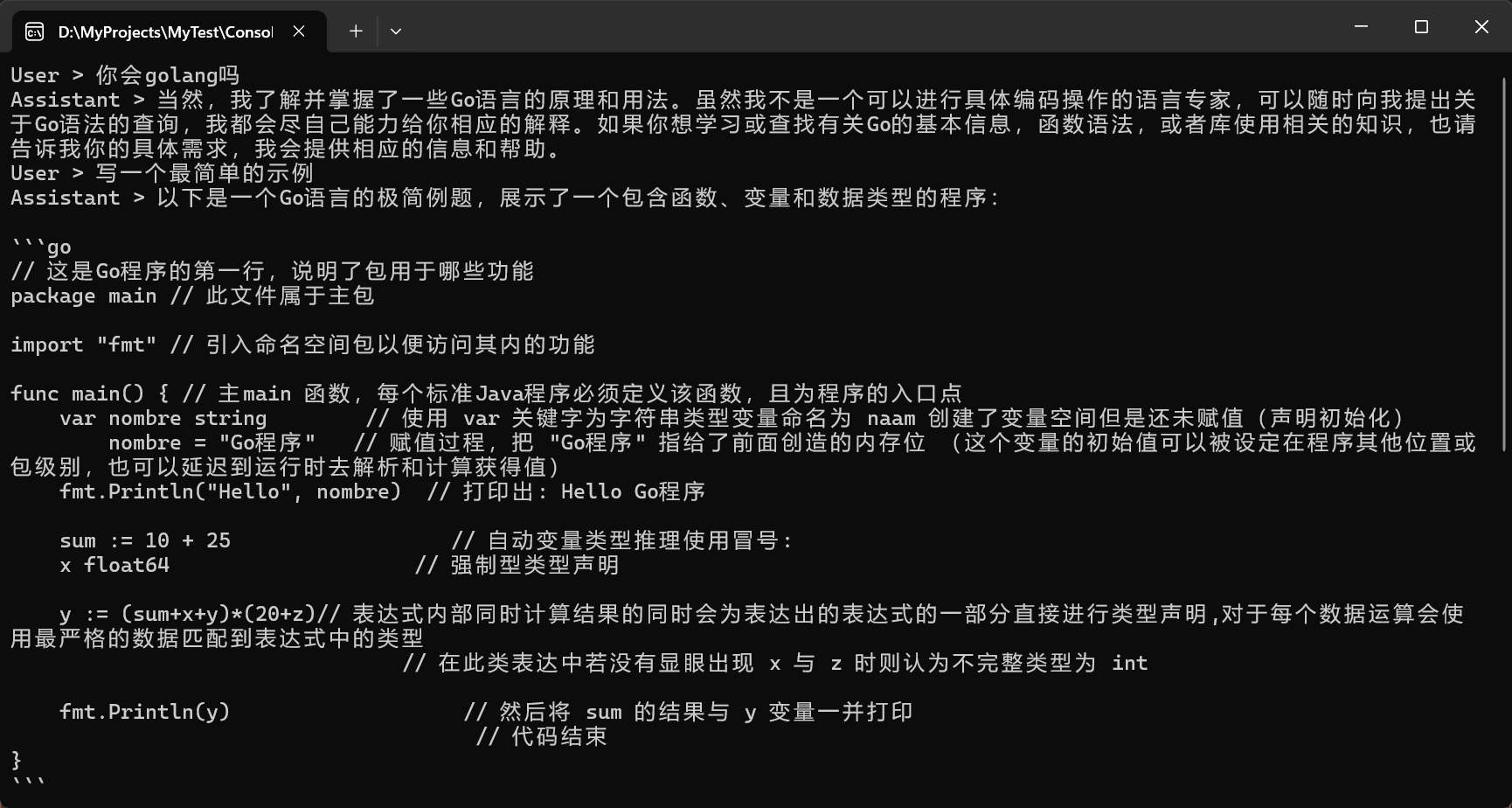
C#整合Ollama实现本地LLMs调用
前言 近两年AIGC发展的非常迅速,从刚开始的只有ChatGPT到现在的很百家争鸣。从开始的大参数模型,再到后来的小参数模型,从一开始单一的文本模型到现在的多模态模型等等。随着一起进步的不仅仅是模型的多样化,还有模型的使用方式。…...

C++基于opencv的视频质量检测--图像抖动检测
文章目录 0.引言1. 原始代码分析2. 优化方案3. 优化后的代码4. 代码详细解读 0.引言 视频质量图像抖动检测已在C基于opencv4的视频质量检测中有所介绍,本文将详细介绍其优化版本。 1. 原始代码分析 首先,我们来看图像抖动检测的原始代码: …...
)
Cuda By Example - 11 (Texture Memory 2-D)
跟1D一样,2D的代码也没有运行过。旧的方法看看就好。 声明二维Texture texture<float, 2> texConstSrc; texture<float, 2> texIn; texture<float, 2> texOut; 访问二维Texture 使用2D的Texture的便利性体现在blend_kernel函数里。不再需要通…...

Go匿名结构体使用场景
1. 定义 在 Go 语言中,匿名结构体(Anonymous Struct)是一种没有显式命名的结构体类型。你可以直接在代码中定义并使用匿名结构体,而不需要为其定义一个单独的类型名称。匿名结构体通常用于临时数据结构或一次性使用的场景。 匿名…...

Vue 发布十年了!你知道我这十年是怎么过的吗?
2014 年 2 月 3 日,Vue 在 Hacker News 上首次亮相。十年后的今天,Vue 已经成为使用最广泛的前端框架之一,拥有了一个非常丰富的生态系统。本文来梳理一下 Vue.js 十年以来的重要里程碑! 尤雨溪,无疑是 Vue.js 背后的灵…...

Unity 6 来袭
这里写自定义目录标题 1.提升渲染性能1.1 降低CPU开销 Lower CPU overhead1.2.减少内存带宽1.3.高档低分辨率帧2.多人游戏创作3.扩大多平台覆盖范围3.1.增进Android平台开发4.使用Runtime AI解锁各种可能性4.1.Unity Muse4.2.Unity Sentis5.实现更具吸引力的视觉效果5.1.自适应…...

别再死记硬背UML关系了!用4+1视图帮你理清类图、时序图到底画给谁看
别再死记硬背UML关系了!用41视图帮你理清类图、时序图到底画给谁看 在软件工程领域,UML(统一建模语言)是每个开发者都绕不开的话题。但有多少人真正理解这些图形的实际应用场景?我们常常看到这样的现象:团队…...

如何用LizzieYzy围棋AI分析工具快速提升棋力:新手完整指南
如何用LizzieYzy围棋AI分析工具快速提升棋力:新手完整指南 【免费下载链接】lizzieyzy LizzieYzy - GUI for Game of Go 项目地址: https://gitcode.com/gh_mirrors/li/lizzieyzy 如果你正在寻找一款能够真正帮助提升围棋水平的AI分析工具,那么Li…...

MySql学习杂谈 --- “连接“”
第一步:忘掉所有术语,记住一个生活场景 想象你要做一件事:查全班同学的考试成绩 表A(同学名单):张三,李四,王五,赵六 表B(考试成绩)࿱…...

重载大件物料输送选滚筒线还是倍速链?
在自动化输送行业摸爬滚打十几年,见过太多工厂因为选错输送线栽跟头——有厂家跟风选倍速链输送重型模具,运行不到一个月就出现链条磨损、滚筒卡死,停产检修花了几万块;也有工厂明明是大件重载输送,却选了轻型滚筒线&a…...

LAV Filters终极指南:深度解析开源DirectShow解码器的架构原理与实战配置
LAV Filters终极指南:深度解析开源DirectShow解码器的架构原理与实战配置 【免费下载链接】LAVFilters LAV Filters - Open-Source DirectShow Media Splitter and Decoders 项目地址: https://gitcode.com/gh_mirrors/la/LAVFilters LAV Filters是一套基于F…...

Java 数组
Java 数组详细教程数组是 Java 中一种基本且重要的数据结构,用于存储固定大小的同类型元素的集合。所有元素在内存中是连续存储的,可以通过索引(下标)快速访问。1. 数组的基本概念元素: 数组中存储的每一个数据项。长度…...

EMD vs NEMD:分子动力学算热导率,新手到底该选哪个?
EMD与NEMD方法实战指南:如何为你的热导率计算选择最佳方案 在纳米材料和新型功能材料的研究中,热导率的精确计算是理解材料热输运性能的关键。面对平衡态分子动力学(EMD)和非平衡态分子动力学(NEMD)两种主流方法,许多研究者常常陷入选择困境。…...

ARM P-Channel接口设计与低功耗SoC电源管理实践
1. ARM P-Channel接口深度解析在低功耗SoC设计中,电源管理接口的可靠性和时序一致性直接决定了系统的能效表现。ARM P-Channel作为专为电源管理设计的标准化接口协议,通过独特的四阶段握手机制,为设备与电源控制器之间建立了高效的状态协商通…...

MSP430F5438 RTC模块配置与低功耗应用实战指南
1. 项目概述与核心价值最近在整理一个老项目的资料,翻到了当年用TI的MSP430F5438做的一个数据记录仪。这个项目里,实时时钟(RTC)模块的稳定性和低功耗配置是关键,当时为了搞定它,可没少花功夫。今天就把关于…...

猫抓插件终极指南:轻松嗅探下载网页视频音频的浏览器神器
猫抓插件终极指南:轻松嗅探下载网页视频音频的浏览器神器 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 你是否曾经遇到过这样的情况&…...