MATLAB下的四个模型的IMM例程(CV、CT左转、CT右转、CA四个模型),附下载链接

基于IMM算法的目标跟踪。利用卡尔曼滤波和多模型融合技术,能够在含噪声的环境中提高估计精度,带图像输出
文章目录
- 概述
- 源代码
- 运行结果
- 代码结构与功能
- 1. 初始化
- 2. 仿真参数设置
- 3. 模型参数设置
- 4. 生成量测数据
- 5. IMM算法初始化
- 6. IMM迭代
- 7. 绘图
- 8. 辅助函数
- 总结
概述
该MATLAB代码实现了基于交互式多模型(IMM)算法的目标跟踪,旨在估计目标在不同运动模式下的状态。代
码使用四种运动模型:匀速直线运动(CV)、左转运动(CT1)、右转运动(CT2)和匀加速运动(CA)。通过生成模拟数据并应用IMM算法,代码能够有效地跟踪目标。
源代码
完整源代码如下,复制粘贴到MATLAB空脚本后可以直接运行:
% 基于IMM算法的目标跟踪,四模型IMM
% 4个模型分别是:CV、左转CT、右转CT、CA
% 2024-09-21/Ver1
clc; clear; close all; % 清除命令窗口、工作空间和关闭所有图形窗口
rng('default'); rng(0); % 设置随机数生成器的默认状态,以确保可重复性%% 仿真参数设置
time = 150; % 仿真迭代次数
T = 1; % 采样间隔(时间步长)
w2 = 3 * 2 * pi / 360; % 模型2的转弯率(3度)
w3 = -3 * 2 * pi / 360; % 模型3的转弯率(-3度)
a4 = 0.1; %匀加速模型的加速度(0.1m*s^-2)
H = [1, 0, 0, 0; % 模型量测矩阵0, 0, 1, 0];
G = [T^2 / 2, 0; % 模型过程噪声加权矩阵T, 0;0, T^2 / 2;0, T];
R = 10 * diag([1, 1]); % 模型量测噪声协方差矩阵
Q = 0.1 * diag([1, 1]); % 模型过程噪声协方差矩阵%% IMM迭代
% 初始化
X_IMM = zeros(4, time); % IMM算法模型综合状态估计值
P_IMM = zeros(4, 4, time); % IMM算法模型综合状态协方差矩阵
r_CV = zeros(2, 1); % 模型1残差
r_CT1 = zeros(2, 1); % 模型2残差
r_CT2 = zeros(2, 1); % 模型3残差
r_CA = zeros(2, 1); % 模型3残差
S_CV = zeros(2, 2); % 模型1残差协方差矩阵X_CV(:, 1) = x0; X_CT1(:, 1) = x0; X_CT2(:, 1) = x0; X_CA(:, 1) = x0; X_IMM(:, 1) = x0; % 初始化各模型状态
pij = [0.9, 0.05, 0.03 0.02; % 3个模型的转移概率矩阵0.1, 0.6, 0.1, 0.2;0.05, 0.13, 0.8, 0.02'0.02, 0.02, 0.06, 0.9];
u_IMM = zeros(4, time); % 初始化模型概率
u_IMM(:, 1) = [0.3, 0.3, 0.3, 0.1]'; % IMM算法模型初始概率
x_CV = x0; x_CT1 = x0; x_CT2 = x0; x_CA = x0; % 各模型初始状态
P0 = diag([1000, 500, 1000, 500]); % 初始状态协方差矩阵
P_CV = P0; P_CT1 = P0; P_CT2 = P0; P_CA = P0; % 各模型初始协方差
P_IMM(:, :, 1) = P0; % 初始化综合状态协方差% 迭代
for t = 1:time - 1% 第一部分 Interacting(只针对IMM算法)c_j = pij' * u_IMM(:, t); % 计算混合概率的归一化因子ui1 = (1 / c_j(1)) * pij(:, 1) .* u_IMM(:, t); % 模型1的混合概率ui2 = (1 / c_j(2)) * pij(:, 2) .* u_IMM(:, t); % 模型2的混合概率ui3 = (1 / c_j(3)) * pij(:, 3) .* u_IMM(:, t); % 模型3的混合概率ui4 = (1 / c_j(4)) * pij(:, 4) .* u_IMM(:, t); % 模型3的混合概率% 计算各模型滤波初始化条件x01 = x_CV * ui1(1) + x_CT1 * ui1(2) + x_CT2 * ui1(3) + x_CA * ui1(4); % 模型1滤波初始状态x02 = x_CV * ui2(1) + x_CT1 * ui2(2) + x_CT2 * ui2(3) + x_CA * ui2(4); % 模型2滤波初始状态x03 = x_CV * ui3(1) + x_CT1 * ui3(2) + x_CT2 * ui3(3) + x_CA * ui3(4); % 模型3滤波初始状态x04 = x_CV * ui4(1) + x_CT1 * ui4(2) + x_CT2 * ui4(3) + x_CA * ui4(4); % 模型3滤波初始状态% 第二步 -- 卡尔曼滤波% 对模型1进行卡尔曼滤波[x_CV, P_CV, r_CV, S_CV] = Kalman(x01, P01, z(:, t + 1), F1, G, Q, H, R);% 对模型2进行卡尔曼滤波[x_CT1, P_CT1, r_CT1, S_CT1] = Kalman(x02, P02, z(:, t + 1), F2, G, Q, H, R);% 对模型3进行卡尔曼滤波[x_CT2, P_CT2, r_CT2, S_CT2] = Kalman(x03, P03, z(:, t + 1), F3, G, Q, H, R);% 对模型3进行卡尔曼滤波[x_CA, P_CA, r_CA, S_CA] = Kalman(x04, P04, z(:, t + 1), F4, G, Q, H, R);% 第三步 -- 模型概率更新[u_IMM(:, t + 1)] = Model_P_up(r_CV, r_CT1, r_CT2, r_CA, S_CV, S_CT2, S_CT2, S_CA, c_j);% 第四步 -- 模型综合[X_IMM(:, t + 1), P_IMM(:, :, t + 1)] = Model_mix(x_CV, x_CT1, x_CT2, x_CA, P_CV, P_CT1, P_CT2, P_CA, u_IMM(:, t));% 保存各模型状态X_CV(:, t + 1) = x_CV; X_CT1(:, t + 1) = x_CT1; X_CT2(:, t + 1) = x_CT2; X_CA(:, t + 1) = x_CA;
end完整代码(包括所有函数)下载链接:https://gf.bilibili.com/item/detail/1106559012
运行结果
各方法估计的轨迹图:

IMM估计的速度误差和位置误差:

各模型的概率曲线:

代码结构与功能
1. 初始化
clc; clear; close all;
rng('default'); rng(0);
- 清理环境:清除命令窗口、工作空间和关闭所有图形窗口。
- 设置随机数生成器:确保生成的随机数可重复。
2. 仿真参数设置
time = 150; % 仿真迭代次数
T = 1; % 采样间隔(时间步长)
- 时间设置:设定仿真迭代次数和采样间隔。
3. 模型参数设置
定义四种运动模型的状态转移矩阵、量测矩阵和噪声协方差矩阵:
- 匀速直线运动(CV)
- 左转运动(CT1)
- 右转运动(CT2)
- 匀加速运动(CA)
每种模型的状态转移矩阵和过程噪声矩阵被明确设置,以便在后续计算中使用。
4. 生成量测数据
x = zeros(4, time); % 状态数据矩阵
z = zeros(2, time); % 含噪声量测数据
- 初始化状态和量测矩阵:生成的状态数据和含噪声的量测数据矩阵。
通过循环,根据设定的时间段选择不同的运动模型并生成状态和量测数据。
5. IMM算法初始化
X_IMM = zeros(4, time); % IMM算法模型综合状态估计值
P_IMM = zeros(4, 4, time); % 模型综合状态协方差矩阵
- 综合状态估计和协方差矩阵初始化:为每个时间步初始化状态和协方差矩阵。
6. IMM迭代
代码的核心部分,涉及以下步骤:
-
模型交互:
- 计算混合概率的归一化因子。
- 计算每个模型的混合概率和滤波初始状态。
-
卡尔曼滤波:
- 对每个模型进行预测和更新,使用
Kalman函数进行状态估计。
- 对每个模型进行预测和更新,使用
-
模型概率更新:
- 根据观测更新每个模型的概率,使用
Model_P_up函数。
- 根据观测更新每个模型的概率,使用
-
模型综合:
- 综合各模型的状态和协方差,更新
X_IMM和P_IMM。
- 综合各模型的状态和协方差,更新
7. 绘图
figure;
plot(z_true(1, :), z_true(2, :), 'DisplayName', '真实值');
- 目标轨迹绘制:显示真实轨迹、估计轨迹和观测值。
- 位置和速度误差:绘制跟踪误差的子图,帮助分析模型的性能。
8. 辅助函数
- 卡尔曼滤波函数 (
Kalman):实现状态预测、更新和协方差更新。 - 模型综合函数 (
Model_mix):结合各模型状态和协方差。 - 模型概率更新函数 (
Model_P_up):计算每个模型的概率。
总结
这段代码通过IMM算法有效地跟踪目标在不同运动模式下的状态,利用卡尔曼滤波和多模型融合技术,能够在含噪声的环境中提高估计精度。通过可视化,用户可以直观地观察到目标的真实轨迹与估计轨迹之间的关系,以及模型的性能表现。
相关文章:
MATLAB下的四个模型的IMM例程(CV、CT左转、CT右转、CA四个模型),附下载链接
基于IMM算法的目标跟踪。利用卡尔曼滤波和多模型融合技术,能够在含噪声的环境中提高估计精度,带图像输出 文章目录 概述源代码运行结果代码结构与功能1. 初始化2. 仿真参数设置3. 模型参数设置4. 生成量测数据5. IMM算法初始化6. IMM迭代7. 绘图8. 辅助函…...

无人机之中继通信技术篇
一、定义与原理 无人机中继通信技术是指通过无人机搭载中继设备,将信号从一个地点传输到另一个地点,从而延长通信距离并保持较好的通信质量。其原理类似于传统的中继通信,即在两个终端站之间设置若干中继站,中继站将前站送来的信号…...
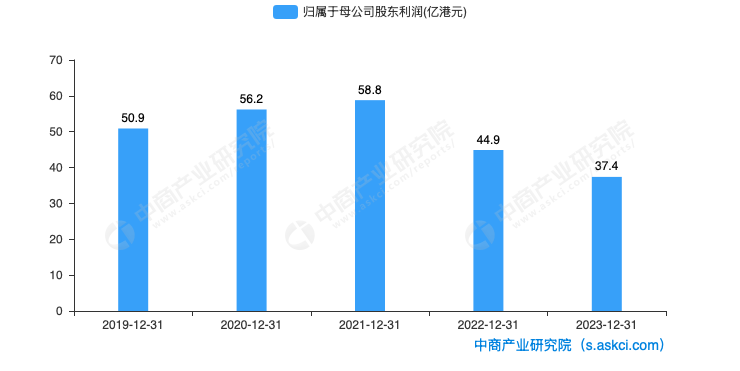
阳光保险隐忧浮现:业绩与股价双双而下,张维功能否力挽狂澜?
10月28日晚间,作为国内新生代险企,也是一家赴港上市的保险集团——阳光保险(HK:06963)一口气对外正式披露了三则财务报告,分别是集团旗下阳光人寿和阳光财险今年前三季度未经审议的财务数据,以及截至三季度…...

【OJ题解】在字符串中查找第一个不重复字符的索引
💵个人主页: 起名字真南 💵个人专栏:【数据结构初阶】 【C语言】 【C】 【OJ题解】 目录 1. 引言2. 题目分析示例: 3. 解题思路思路一:双重循环思路二:哈希表 4. C代码实现5. 代码详解6. 时间和空间复杂度分析7. 优化方…...

处理配对和拆分内容 |【python技能树知识点1~2 习题分析】
目录 一、编程语言简史(配对)题目要求:程序设计: 二、 编程语言发明家(拆分)题目要求程序实现while和for循环 python技能树知识点中的一些习题练习和分析。熟悉python编程模式和逻辑。 一、编程语言简史&am…...
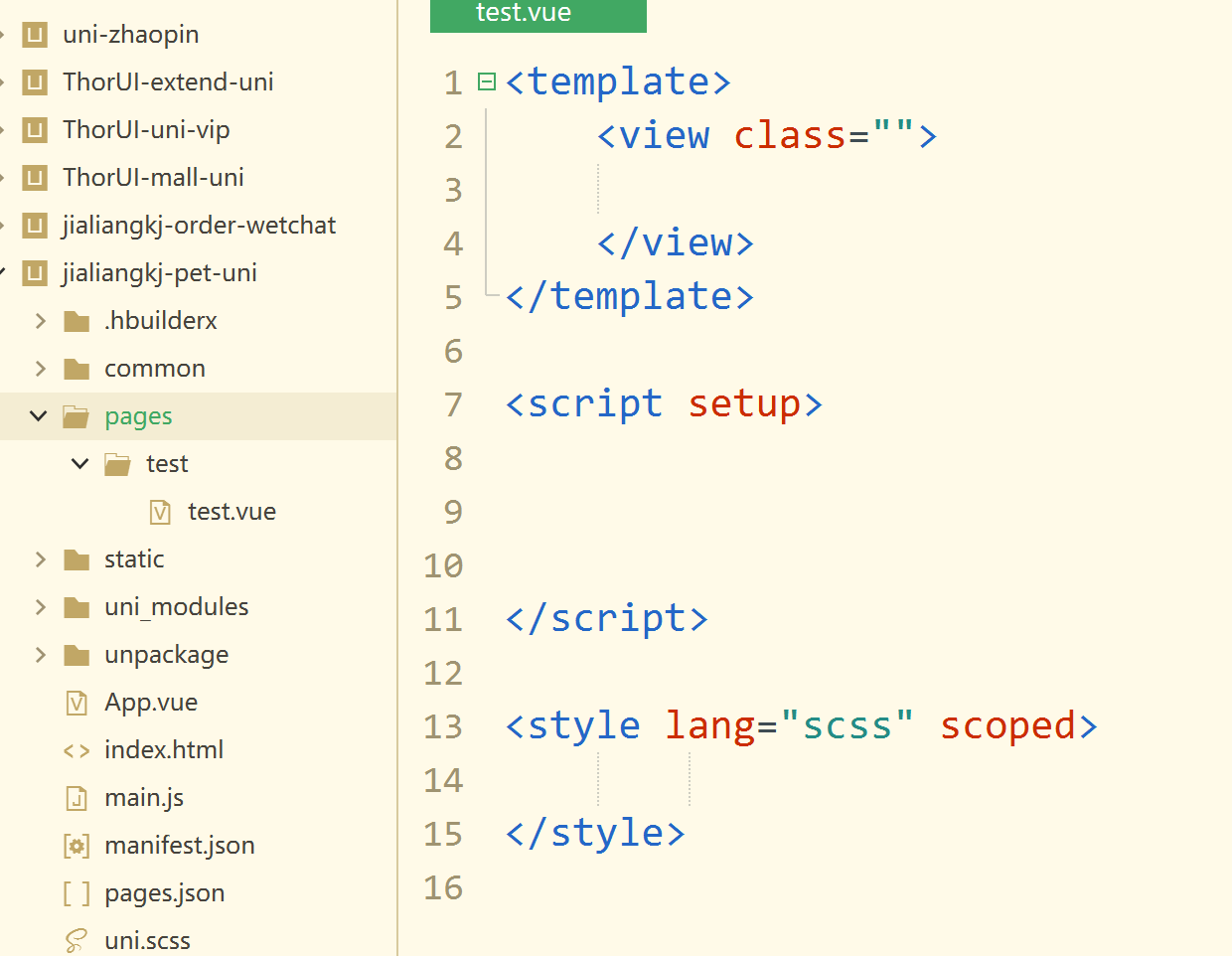
HBuilderX自定义Vue3页面模版
HBuilderX自定义Vue3页面模版 首先在HBuilderX工具下的任意一个项目添加新建自定义页面模版 新建模版文件,并打开进行编辑 vue3-setup-js.vue文件里填写样式模版(根据自己的需要进行修改) <template><view class"">&…...

计算机网络——TCP中的流量控制和拥塞控制
TCP中的流量控制和拥塞控制 流量控制 什么是流量控制 如果发送者发送数据过快,接收者来不及接收,那么就会出现分组丢失,为了避免分组丢失,控制发送者的发送速度,使得接收者来得及接收,这就是流量控制。 …...
BFV/BGV全同态加密方案浅析
本文主要为翻译内容,原文地址:Introduction to the BFV encryption scheme、https://www.inferati.com/blog/fhe-schemes-bgv 之前的一篇博客我们翻译了CKKS全同态加密方案的内容,但该篇上下文中有一些知识要点,作者在BFV/BGV中已…...

Elasticsearch 实战应用详解!
Elasticsearch 实战应用详解 一、概述 Elasticsearch 是一个高度可扩展的开源全文搜索引擎,它能够处理大量数据并提供实时搜索和分析能力。基于 Lucene 构建,Elasticsearch 通过简单的 RESTful API 接口隐藏了 Lucene 的复杂性,使全文搜索变…...
最新最全面的JAVA面试题免费下载
面对求职市场的激烈竞争,掌握全面且深入的Java知识已成为每一位Java开发者必不可少的技能。《2023最新版Java面试八股文》是一份精心整理的面试准备资料,旨在帮助广大开发者系统复习,从容应对Java及相关技术栈的面试挑战。这份文档不仅汇聚了…...

修改sql server 数据库的排序规则
文章目录 引言I 解决方案案例II 知识扩展排序规则SQL SERVER支持的所有排序规则引言 新增sql server 数据库实例的默认排序规则不支持中文存储,导致乱码 解决方案: 修改排序规则为Chinese_PRC_CI_AS 或者 Chinese_PRC_Stroke_CI_AS_WS或者Chinese_PRC_CI_AI_KS_WS 仅对新增…...

Node学习记录-until实用工具
来源:Nodejs 第十八章(util) util 是Node.js内部提供的很多实用或者工具类型的API util.promisify 用于将遵循Node回调风格(即最后一个参数为回调函数)的函数转换成返回Promise的函数,这样可以使得异步代…...

【Mac】安装 VMware Fusion Pro
VMware Fusion Pro 软件已经正式免费提供给个人用户使用! 1、下载 【官网】 下拉找到 VMware Fusion Pro Download 登陆账号 如果没有账号,点击右上角 LOGIN ,选择 REGISTER 注册信息除了邮箱外可随意填写 登陆时,Username为…...

解决go run main.go executable file not found in %PATH%
项目场景: 命令行执行go run 都会报 executable file not found in %PATH% 问题描述 最近我发现,我通过命令行,无论是跑什么go文件,都会出现这个错误。但是我通过我的IDE就能跑,于是我也没有管它。 但是最近&#x…...

C++ 手写常见的任务定时器
序言 最近在编写 C 的服务器代码时,我遇到了一个需求,服务器很可能会遇到那些长期不活跃的连接,这些连接占用了一定的资源但是并没有进行有效的通信。为了优化资源使用,我决定实现一个定时器,以便定期检查连接的活跃状…...
【VS+QT】联合开发踩坑记录
最新更新日期:2024/11/05 0. 写在前面 因为目前在做自动化产线集成软件开发相关的工作,需要用到QT,所以选择了VS联合开发,方便调试。学习QT的过程中也踩了很多坑,在此记录一下,提供给各位参考。 1. 环境配…...
PH热榜 | 2024-11-05
DevNow 是一个精简的开源技术博客项目模版,支持 Vercel 一键部署,支持评论、搜索等功能,欢迎大家体验。 Github:https://github.com/LaughingZhu/DevNow 1. FullContext 标语:用自然语言,让你的市场推广流…...

模拟机器人逐字回答,类似于实时回话
代码如下 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><meta name"viewport" content"widthdevice-width, initial-scale1.0"><title>Document</title> </head><…...

Java学习路线:JUL日志系统(一)日志框架介绍
目录 打印日志 日志的级别 打印文件 日志过滤器 日志输出流程 首先,为什么要使用日志系统? 如果单纯地用System.out.println打印信息,如果项目比较大,存在大量的信息就会显得非常凌乱。 而且,当我们希望在debug的…...

[渲染层网络层错误] net::ERR_CONTENT_LENGTH_MISMATCH 问题解决
问题描述 问题背景 微信小程序访问后端img资源的时候,偶尔出现这个感叹号,图片加载不出来,但是对应的url贴出来在浏览器中访问,或者重新加载是可以访问的。 错误描述 经查询前端报错 [渲染层网络层错误] net::ERR_CONTENT_LE…...

如何永久保存你的微信聊天记忆?WeChatMsg完整解决方案揭秘
如何永久保存你的微信聊天记忆?WeChatMsg完整解决方案揭秘 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/W…...
存在系统性解析缺陷!已确认影响金融票据识别与工业质检部署,补丁预计Q3上线)
紧急通告:Gemini当前版本对非RGB图像(CMYK/灰度/16bit TIFF)存在系统性解析缺陷!已确认影响金融票据识别与工业质检部署,补丁预计Q3上线
更多请点击: https://kaifayun.com 第一章:Gemini图片理解能力测试 Gemini 模型在多模态理解方面展现出显著的图像解析能力,尤其在细粒度视觉推理、文字识别(OCR)、场景语义理解及跨模态对齐任务中表现突出。为系统评…...

Unity Android启动卡在Waiting For Debugger原因与三套解决方案
1. 这个“Waiting For Debugger”到底在等谁?——从Unity启动流程看问题本质你刚在Android设备上点开调试中的Unity App,屏幕却卡在黑屏或白屏,Logcat里反复刷出一行红色日志:Waiting For Debugger。你反复检查USB调试开关、ADB权…...
)
ssm网上订餐系统(10089)
有需要的同学,源代码和配套文档领取,加文章最下方的名片哦 一、项目演示 项目演示视频 二、资料介绍 完整源代码(前后端源代码SQL脚本)配套文档(LWPPT开题报告/任务书)远程调试控屏包运行一键启动项目&…...
问题)
可视化 React 水合(Hydration)问题
以下是 Next.js React 水合(Hydration)问题的 Mermaid 可视化,包含流程图(问题全景)和时序图(时间线视角),以及简要说明。1. 水合问题全景流程图 #mermaid-svg-tjAQ0VWDBl1ii9LA{fo…...

告别电脑休眠烦恼:MouseJiggler鼠标抖动工具完全指南
告别电脑休眠烦恼:MouseJiggler鼠标抖动工具完全指南 【免费下载链接】mousejiggler Mouse Jiggler is a very simple piece of software whose sole function is to "fake" mouse input to Windows, and jiggle the mouse pointer back and forth. 项目…...

Warcraft Helper终极指南:让经典魔兽争霸3在现代Windows系统重获新生
Warcraft Helper终极指南:让经典魔兽争霸3在现代Windows系统重获新生 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸3在Wi…...

MindSpore 适配 NPU 的全链路解析——从算子注册到端到端性能调优
MindSpore 怎么在 NPU 上跑起来?不是简单的「编译运行」,而是从前端算子注册、后端算子选择、内存分配、到通信库对接的全链路适配。这篇文章把这整套流程拆开讲清楚。 上周有个 MindSpore 的用户问我:「为什么我的网络在 GPU 上能跑…...

显存直降68%、推理提速3.2倍,DeepSeek-V2量化部署方案全解析,仅限首批内测团队流出
更多请点击: https://codechina.net 第一章:DeepSeek-V2量化部署方案全景概览 DeepSeek-V2作为高性能开源大语言模型,在实际生产环境中面临显存占用高、推理延迟大等挑战。量化部署是实现低资源开销与高吞吐并存的关键路径,本章…...

BilibiliDown:3分钟快速掌握B站视频下载的完整解决方案
BilibiliDown:3分钟快速掌握B站视频下载的完整解决方案 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirrors/…...