计算机视觉在自动驾驶汽车中的应用
💓 博客主页:瑕疵的CSDN主页
📝 Gitee主页:瑕疵的gitee主页
⏩ 文章专栏:《热点资讯》
计算机视觉在自动驾驶汽车中的应用
- 计算机视觉在自动驾驶汽车中的应用
- 引言
- 计算机视觉在自动驾驶中的重要性
- 关键技术
- 图像采集
- 特征提取
- 目标检测
- 车道检测
- 交通信号识别
- 行为预测
- 实现方法
- 数据收集与标注
- 模型训练
- 实时处理
- 示例代码
- 未来发展方向
- 多传感器融合
- 3D感知
- 强化学习
- 边缘计算
- 法规与伦理
- 结论
- 参考资料
自动驾驶汽车是近年来科技领域的热点话题之一。随着人工智能技术的飞速发展,特别是计算机视觉技术的进步,自动驾驶汽车正逐渐从实验室走向现实道路。计算机视觉在自动驾驶汽车中起着至关重要的作用,它能够帮助车辆感知周围环境,做出决策并安全行驶。本文将详细介绍计算机视觉在自动驾驶汽车中的应用,包括关键技术、实现方法和未来发展方向。
计算机视觉是指计算机从图像或视频中提取信息的技术。在自动驾驶汽车中,计算机视觉主要用于以下几个方面:
- 环境感知:通过摄像头捕捉车辆周围的图像,识别道路上的物体、交通标志和行人等。
- 车道检测:检测和跟踪车道线,帮助车辆保持在正确的车道上。
- 障碍物检测:识别前方的障碍物,如其他车辆、行人、动物等,避免碰撞。
- 交通信号识别:识别交通信号灯和交通标志,遵守交通规则。
- 行为预测:预测其他交通参与者的运动轨迹,提前做出反应。
自动驾驶汽车通常配备多个摄像头,包括前视摄像头、后视摄像头和环视摄像头。这些摄像头可以捕捉车辆周围的全景图像,为计算机视觉算法提供输入数据。
特征提取是从图像中提取有用信息的过程。常用的特征提取方法包括SIFT(尺度不变特征变换)、HOG(方向梯度直方图)和深度学习方法(如卷积神经网络CNN)。深度学习方法在特征提取方面表现出色,能够自动学习到高级特征。
目标检测是识别图像中特定对象的过程。在自动驾驶汽车中,目标检测主要用于识别车辆、行人、交通标志等。常用的目标检测算法包括YOLO(You Only Look Once)、Faster R-CNN和SSD(Single Shot MultiBox Detector)。
车道检测是识别和跟踪车道线的过程。常用的车道检测方法包括基于边缘检测的方法和基于深度学习的方法。基于边缘检测的方法通过检测图像中的边缘来识别车道线,而基于深度学习的方法则通过训练神经网络来直接预测车道线的位置。
交通信号识别是识别交通信号灯和交通标志的过程。常用的交通信号识别方法包括基于模板匹配的方法和基于深度学习的方法。基于模板匹配的方法通过与预定义的模板进行匹配来识别交通信号,而基于深度学习的方法则通过训练神经网络来识别交通信号。
行为预测是预测其他交通参与者的运动轨迹的过程。常用的行为预测方法包括基于规则的方法和基于机器学习的方法。基于规则的方法通过预定义的规则来预测其他交通参与者的运动轨迹,而基于机器学习的方法则通过训练模型来预测其他交通参与者的运动轨迹。
数据收集是计算机视觉算法的基础。自动驾驶汽车需要大量的图像数据来进行训练和测试。数据标注是指对图像中的对象进行标记,以便训练算法。常用的数据标注工具包括LabelMe和Labelbox。
模型训练是使用大量标注数据训练计算机视觉模型的过程。常用的深度学习框架包括TensorFlow、PyTorch和Keras。通过训练模型,可以使其具备识别和检测特定对象的能力。
自动驾驶汽车需要在实时环境下运行,因此计算机视觉算法必须具备高效的实时处理能力。常用的实时处理技术包括GPU加速、模型剪枝和量化等。
以下是一个使用TensorFlow进行目标检测的Python示例代码:
import tensorflow as tf
from object_detection.utils import label_map_util
from object_detection.utils import visualization_utils as viz_utils
import cv2# 加载模型
model = tf.saved_model.load('path/to/saved_model')# 加载标签映射文件
category_index = label_map_util.create_category_index_from_labelmap('path/to/label_map.pbtxt', use_display_name=True)# 打开摄像头
cap = cv2.VideoCapture(0)while True:ret, image_np = cap.read()if not ret:break# 进行推理input_tensor = tf.convert_to_tensor(image_np)input_tensor = input_tensor[tf.newaxis, ...]detections = model(input_tensor)# 处理检测结果num_detections = int(detections.pop('num_detections'))detections = {key: value[0, :num_detections].numpy()for key, value in detections.items()}detections['num_detections'] = num_detectionsdetections['detection_classes'] = detections['detection_classes'].astype(np.int64)# 可视化检测结果viz_utils.visualize_boxes_and_labels_on_image_array(image_np,detections['detection_boxes'],detections['detection_classes'],detections['detection_scores'],category_index,use_normalized_coordinates=True,max_boxes_to_draw=200,min_score_thresh=.30,agnostic_mode=False)# 显示图像
cv2.imshow('Object Detection', image_np)if cv2.waitKey(1) & 0xFF == ord('q'):break# 释放摄像头
cap.release()
cv2.destroyAllWindows()
多传感器融合是指将多种传感器(如摄像头、激光雷达、毫米波雷达等)的数据进行融合,以提高感知的准确性和鲁棒性。多传感器融合是未来自动驾驶汽车的一个重要研究方向。
3D感知是指从三维空间中获取物体的信息。3D感知可以提供更丰富的环境信息,帮助车辆更好地理解周围环境。常用的3D感知技术包括点云处理和立体视觉。
强化学习是一种通过与环境交互来学习最优策略的方法。在自动驾驶汽车中,强化学习可以用于优化车辆的决策和控制策略。
边缘计算是指在靠近数据源的地方进行计算,以减少数据传输延迟。在自动驾驶汽车中,边缘计算可以提高实时处理能力,降低对云端的依赖。
随着自动驾驶汽车的普及,相关的法规和伦理问题也日益受到关注。如何确保自动驾驶汽车的安全性和隐私保护,是未来研究的重要方向。

计算机视觉在自动驾驶汽车中发挥着至关重要的作用。通过环境感知、车道检测、障碍物检测、交通信号识别和行为预测等技术,自动驾驶汽车能够安全地行驶在道路上。随着技术的不断进步,未来的自动驾驶汽车将更加智能和可靠,为人们的出行带来更多的便利和安全。

- TensorFlow Object Detection API
- OpenCV Documentation
- YOLO: Real-Time Object Detection
- Faster R-CNN
- SSD: Single Shot MultiBox Detector
- Deep Learning for Computer Vision
相关文章:
计算机视觉在自动驾驶汽车中的应用
💓 博客主页:瑕疵的CSDN主页 📝 Gitee主页:瑕疵的gitee主页 ⏩ 文章专栏:《热点资讯》 计算机视觉在自动驾驶汽车中的应用 计算机视觉在自动驾驶汽车中的应用 计算机视觉在自动驾驶汽车中的应用 引言 计算机视觉在自动…...

wordpress functions文件的作用及详细说明
WordPress的functions.php文件是一个非常重要的主题文件,它允许开发者和用户向网站添加自定义代码片段,从而修改网站功能或添加新内容。以下是functions.php文件的主要作用和一些详细说明: 1. 自定义功能添加: functions.php文件…...

Cellebrite VS IOS18Rebooting
Cellebrite VS IOS18Rebooting我们想分享一些有关 iOS 18 重启“功能”的信息。在过去一周左右的时间里,人们对 iOS 18 中一项新的未记录功能产生了极大关注,该功能会导致设备在一段时间不活动后重新启动。 这意味着,如果设备在一定时间不活…...

[每日一氵] PySpark 的 log GC 部分是什么意思
2024-11-15T11:10:40.2920800: 2850.503: [GC (Allocation Failure) [PSYoungGen: 142705K->3472K(141312K)] 1403514K->1264289K(1543168K), 0.0170225 secs] [Times: user0.05 sys0.00, real0.01 secs] 这一行日志来自Java的垃圾收集器(Garbage Collector, …...

Transformer中的算子:其中Q,K,V就是算子
目录 Transformer中的算子 其中Q,K,V就是算子 一、数学中的算子 二、计算机科学中的算子 三、深度学习中的算子 四、称呼的由来 Transformer中的算子 其中Q,K,V就是算子 “算子”这一称呼源于其在数学、计算机科学以及深度学习等多个领域中的广泛应用和特定功能。以下是…...

JWTUtil工具类
写一个Jwt工具类 导入如下pom.xml依赖 <!--fastjson依赖--><dependency><groupId>com.alibaba</groupId><artifactId>fastjson</artifactId><version>1.2.33</version></dependency><!--jwt依赖--><dependenc…...

【eNSP】企业网络架构实验——vlan间的路由通信(三)
VLAN间的路由是指不同VLAN之间的通信,通常VLAN是用来分割网络流量和提高网络安全性的。 一、VLAN 1. 什么是VLAN? VLAN,全称是虚拟局域网(Virtual Local Area Network),是一种将物理局域网(LA…...
)
软件测试基础二十九 (接口测试 mock)
Mock(模拟) 一、定义 Mock是在软件开发测试阶段使用的一种技术,用于模拟对象的行为。它主要用于隔离被测试单元(如函数、类或模块)与外部依赖,使得测试更加独立、可控,并且可以在不需要真实外…...

Learning RAG and Ragas
说明:这是我的学习笔记,很多内容转自网络,请查阅文章末尾的参考资料。 文章目录 RAGRagas评估框架评估维度评估指标Faithfulness (忠实度)Answer Relevance (答案相关度)Context Precision (上下文精确度)Context Recall (上下文召回率)Cont…...

Java项目实战II基于微信小程序的实习记录(开发文档+数据库+源码)
目录 一、前言 二、技术介绍 三、系统实现 四、文档参考 五、核心代码 六、源码获取 全栈码农以及毕业设计实战开发,CSDN平台Java领域新星创作者,专注于大学生项目实战开发、讲解和毕业答疑辅导。 一、前言 在当今竞争激烈的就业市场中࿰…...

GIT将源码推送新分支
1. 创建并切换到新分支 首先,确保你在本地创建了一个新的分支并切换到该分支: git checkout -b new-branch-namenew-branch-name 是你要创建的新分支名称,替换为你需要的名称即可。 2. 确保所有更改已提交 在推送之前,确保你的…...

Python习题 250:删除空文件夹
(编码题)编写一段 Python 代码,删除指定目录的空文件夹。 参考答案: 使用 pathlib 库可以更简洁地处理文件路径。下面是一个使用 pathlib 库递归删除空文件夹的 Python 代码:from pathlib import Pathdef remove_empty_dirs(directory):# 遍历目录及其子目录for path in…...
、Java 和 C++ 的比较)
基本数据类型:Kotlin、Dart (Flutter)、Java 和 C++ 的比较
文章目录 基本数据类型的比较整数类型浮点类型字符类型布尔类型小结 有符号和无符号整数二进制补码表示精度丢失问题结论 在编程语言中,基本数据类型是构建更复杂数据结构的基础。在本文中,我们将比较 Kotlin、Dart (Flutter)、Java 和 C 中的基本数据类…...
)
源码解析-Spring Eureka(更新ing)
源码解析-Spring Eureka 文章目录 源码解析-Spring Eureka前言一、从Spring.factory和注解开始二、重要的一步EurekaServerInitializerConfiguration三、初始化了什么?自动保护 四, 重新回到EurekaServerAutoConfiguration 前言 无 一、从Spring.factory和注解开始…...

python调用百度通用翻译API
文章目录 1. 简介2. 使用步骤3. api调用实现4. 编码实现 1. 简介 前段时间在做视频语音识别生成多语种字幕时,使用了百度翻译通用翻译api进行翻译。百度翻译平台经过个人认证之后,每月有200万字符的免费翻译额度。还是比较舒服的。 百度翻译开放平台是百…...
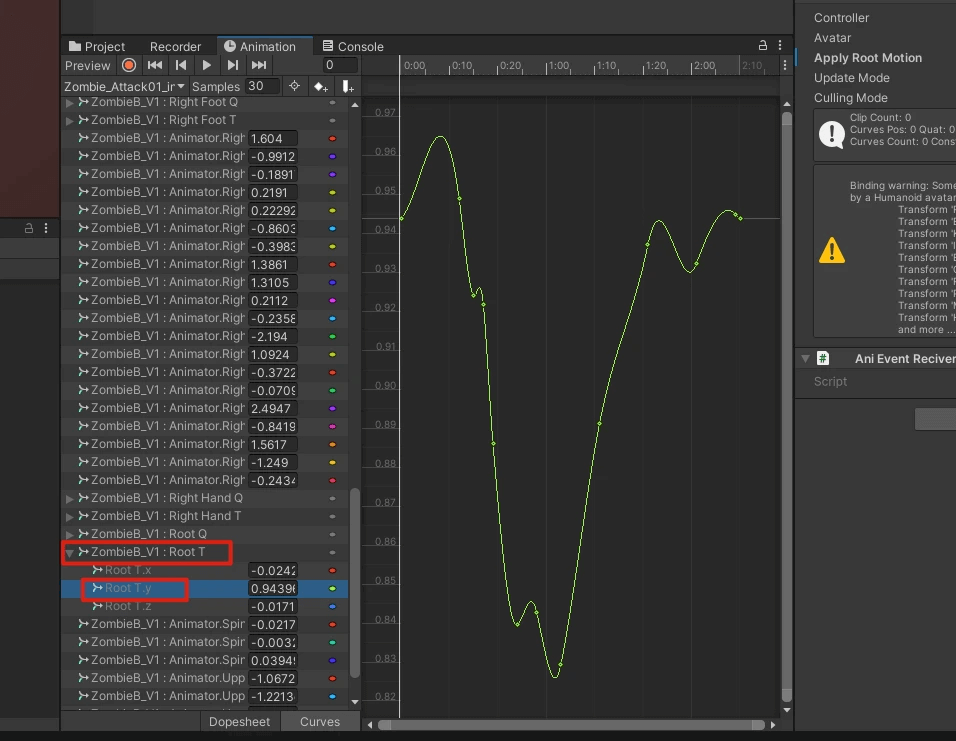
Timeline动画「硬切」的问题
1)Timeline动画「硬切」的问题 2)移动平台纹理压缩格式选择ASTC,美术出图还需遵守POT吗 3)如何去掉DOTS Unity.Entities.Graphics创建的BatchRendererGroup的UI相机回调 4)Timeline播放动画会产生位移的问题 这是第409…...

CentOS 9 配置网卡
在 CentOS 9 中配置网卡,通常涉及以下几个步骤: 1. 查看网络接口 首先,确认系统上存在的网络接口。可以使用 ip 命令或 ifconfig 命令查看网络接口的状态。 ip a 或者: ifconfig 这将列出所有可用的网络接口(例如…...
 adlist双向链表)
redis7.x源码分析:(2) adlist双向链表
链表是一种常用的数据结构(如果不了解,请先学习数据结构),由于c语言本身没有实现标准的链表库,所以redis自己实现了一个双向链表。 双向链表在redis内部的使用非常的多,几乎所有模块中都有用到。 下面看下它…...

KUKU FM 音频Linux平台免费下载工具
1.工具名称:kuku-dl 功能: ✅ 下载播客、故事和有声读物! ✅ 获取所有元数据和封面艺术品。 ✅ 支持字幕! 3.使用说明: 3.1. 直接镜像github源码库 👉 git clone https://github.com/bunnykek/kuku-…...

《Django 5 By Example》阅读笔记:p105-p164
《Django 5 By Example》学习第5天,p105-p164总结,总计60页。 一、技术总结 1.文章标签功能 Django自带django-taggit。 2.自定义template tags 3.roadmap功能 4.RSS功能 5.full-text搜索功能 这里使用的是Postgresql,使用pip install psycopg安…...

5个技巧快速掌握猫抓插件:免费高效的浏览器资源下载终极指南
5个技巧快速掌握猫抓插件:免费高效的浏览器资源下载终极指南 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 在当今数字内容爆炸的时代…...

MoocDownloader:三步轻松下载中国大学MOOC课程,实现离线学习自由
MoocDownloader:三步轻松下载中国大学MOOC课程,实现离线学习自由 【免费下载链接】MoocDownloader An MOOC downloader implemented by .NET. 一枚由 .NET 实现的 MOOC 下载器. 项目地址: https://gitcode.com/gh_mirrors/mo/MoocDownloader 你是…...

MPC-BE:Windows平台终极开源多媒体播放器架构深度解析与实战指南
MPC-BE:Windows平台终极开源多媒体播放器架构深度解析与实战指南 【免费下载链接】MPC-BE MPC-BE – универсальный проигрыватель аудио и видеофайлов для операционной системы Windows. 项…...

【AI编程生产力跃迁】:用Perplexity秒级获取可运行代码示例的6大权威提示工程模板
更多请点击: https://codechina.net 第一章:Perplexity代码示例查询的核心机制与能力边界 Perplexity 在处理代码示例查询时,并非依赖静态模板匹配,而是通过多阶段语义理解与上下文感知检索协同实现:首先对用户自然语…...

中国的未来学图书怎么没有外国强
中国的未来学图书在 知识传统、市场机制、作者结构、表达方式和出版风险 上,确实还没有形成像英美那样成熟的生态。 国外未来学图书强,往往不是因为作者真的“预测得更准”,而是因为他们更擅长把 技术趋势、商业叙事、社会想象和个人行动方案…...
)
别再手动reshape了!用einops.rearrange优雅处理PyTorch张量维度(附实战代码)
用einops.rearrange重塑PyTorch张量:告别混乱的维度操作 深度学习开发中最令人头疼的莫过于张量维度的变换。你是否曾在凌晨三点盯着屏幕,试图理解自己昨天写的permute和reshape组合到底在做什么?或者花费半小时调试一个维度不匹配的错误&…...

STM32 FSMC/FMC接口配置与调试:从时序参数到实战应用
1. 项目概述:为什么FSMC/FMC是STM32开发者绕不开的“硬骨头”?在STM32的众多外设中,FSMC(Flexible Static Memory Controller,灵活静态存储器控制器)及其升级版FMC(Flexible Memory Controller&…...

【免费下载】 树莓派4B原理图资源下载
树莓派4B原理图资源下载 【下载地址】树莓派4B原理图资源下载分享 树莓派4B原理图资源下载本仓库提供了一个方便的途径,供大家下载树莓派4B的原理图资源文件 项目地址: https://gitcode.com/open-source-toolkit/ae590 本仓库提供了一个方便的途径࿰…...

接入Taotoken多模型路由后服务端响应稳定性提升感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 接入Taotoken多模型路由后服务端响应稳定性提升感受 1. 背景:生产环境对AI服务稳定性的需求 在构建依赖大模型API的生…...

泉州某卫浴GEO优化实战:四标融合+场景化方法论,从搜索不可见到AI优先引用
我们在服务制造业企业的过程中发现一个根本性变化:过去大家关心“怎么让用户搜到我”,现在AI直接生成答案,企业真正的挑战变成了“怎么让AI准确信任我、优先引用我”。传统SEO在AI的“黑箱”面前越来越失效,企业必须重新建立一套可…...