ROS2 Humble 机器人建模和Gazebo仿真
一.Ubuntu22.04系统虚拟机安装
1.下载镜像并安装 Index of /ubuntu-releases/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror
2.安装选英文版,安装类型选清除磁盘。


3.遇到无法复制windows内容到虚拟机里。需安装VMware tools。VMware tools安装不了,提示连接到更新服务器时发生证书错误。
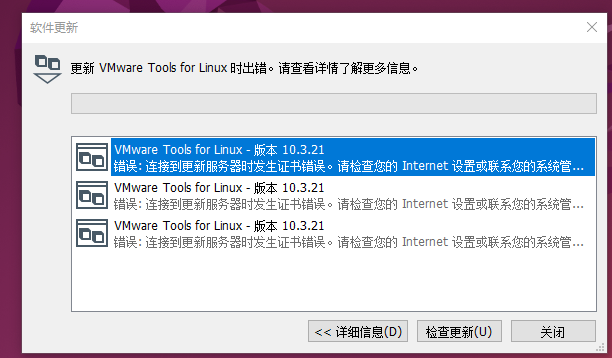
科学上网,输入以下命令:
sudo apt autoremove open-vm-tools
sudo apt update
sudo apt install open-vm-tools
sudo apt install open-vm-tools-desktop二.ROS2 humble系统安装
1.系统搭配说明:Ubuntu 22.04搭配ROS 2 Humble。

2.安装ROS2 Humble,需要科学上网。
官网提示https://docs.ros.org/en/humble/Installation/Ubuntu-Install-Debs.htm
3.添加ROS2 apt源
sudo apt install software-properties-common
sudo add-apt-repository universe4.add ROS 2 GPG key
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg5.添加仓库源列表sources list.
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
sudo apt update
#安装ROS2核心组件、RViz可视化工具、演示和教程等资源,但不包含开发工具。
sudo apt install ros-humble-desktop
#安装ROS开发、构建、测试和调试ROS应用的工具
sudo apt install ros-dev-tools6.设置环境变量
source /opt/ros/humble/setup.bash三.安装开发工具
1.vscode
下载地址Visual Studio Code - Code Editing. Redefined
sudo dpkg -i code_1.9*2. 安装terminator
sudo apt install terminator3.Rviz
#运行命令
ros2 run rviz2 rviz2四.Gazebo仿真平台
ROS2支持的仿真平台有:Gazebo、Ignition、WeBots、Unity。
- Gazebo官网:Cyberbotics: Robotics simulation with Webots,Gazebo是ROS中常用的机器人仿真平台。
- Ignition官网:Gazebo 官方文档:https://ignitionrobotics.org/docs继承Gazebo的下一代仿真平台,基于开发库和云服务等工具箱,提供新的简化的仿真方式。
- WeBots官网:Cyberbotics: Robotics simulation with Webots
- Unity官网:hUnity Real-Time Development Platform | 3D, 2D, VR & AR Engine UnityForROS2:https://github.com/RobotecAI/ros2-for-unity
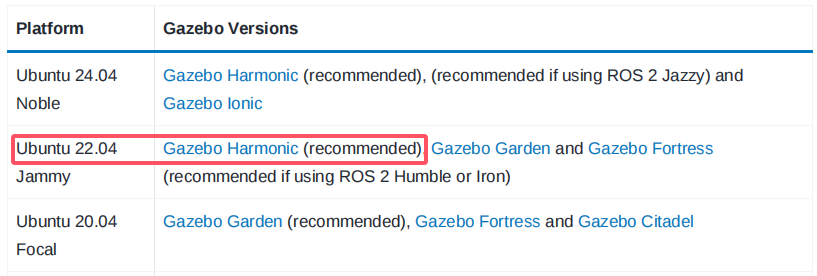
1.安装Gazebo Harmonic
# 安装Gazebo的ROS 2集成包
sudo apt install ros-humble-gazebo-ros-pkgs
# 下载Gazebo的地图模型
git clone https://gazebosim.org/docs/latest/getstarted/2.制作机器人模型
动手学ROS2
3.验证gitee LiJianghao/mbot_gazebo_ros2代码,安装环境依赖
sudo apt install ros-humble-gazebo* #安装gazebo依赖库和插件
sudo apt install ros-humble-velodyne* #安装Velodyne(威力登)激光雷达依赖和软件包发现这套代码运行起来,虚拟机变得很卡!!!!应该是模型配置的有点复杂!!
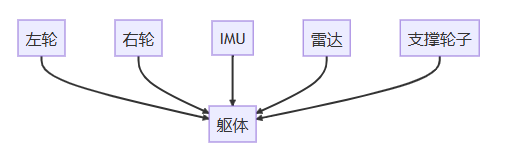
五.URDF统一机器人建模语言
1.建立机器人模型
动手学ROS2

2.URDF可视化步骤如下:
- 建立机器人描述功能包
- 建立
urdf文件夹编写urdf文件 - 建立
launch文件夹,编写launch文件 - 修改
setup.py配置,编译测试
3.机器人建模过程:参考鱼香ros
- 创建机器人包,具体见以下网页
https://fishros.com/d2lros2/#/humble/chapt8/get_started/2.RVIZ2%E5%8F%AF%E8%A7%86%E5%8C%96URDF%E6%A8%A1%E5%9E%8B
ros2 pkg create fishbot_description --build-type ament_python- 查看节点和他们的通信关系
sudo snap install tree #安装新版的tree
rqt_graph #显示节点和及它们之间的通信关系相关文章:
ROS2 Humble 机器人建模和Gazebo仿真
一.Ubuntu22.04系统虚拟机安装 1.下载镜像并安装 Index of /ubuntu-releases/ | 清华大学开源软件镜像站 | Tsinghua Open Source Mirror 2.安装选英文版,安装类型选清除磁盘。 3.遇到无法复制windows内容到虚拟机里。需安装VMware tools。VMware tools安装不了&a…...

docker容器镜像的制作、使用以及传递
目录 制作容器镜像使用Dockerfile制作镜像准备所需文件构建镜像怎么不使用基础镜像来构建容器镜像 使用容器镜像传递容器镜像 这篇文章讨论一下怎么使用docker制作容器镜像,容器镜像的使用,以及怎么传递容器镜像。 制作容器镜像 docker制作容器镜像推荐…...

一种由于吸入硅酸盐粉尘而引起的肺部疾病:pneumonoultramicroscopicsilicovolcanoconiosis
有人说,pneumonoultramicroscopicsilicovolcanoconiosis是英语中最长的单词,这是一个医学词汇,意思是指:一种由于吸入硅酸盐粉尘而引起的肺部疾病。 pneumonoultramicroscopicsilicovolcanoconiosis [ˈnju:mənəuˌʌltrəˌmai…...

百度AI人脸检测与对比
1.注册账号 打开网站 https://ai.baidu.com/ ,注册百度账号并登录 2.创建应用 3.技术文档 https://ai.baidu.com/ai-doc/FACE/yk37c1u4t 4.Spring Boot简单集成测试 pom.xml 配置: <!--百度AI--> <dependency> <groupId>com.baidu.…...

贴代码框架PasteForm特性介绍之outer,outers,object,objects,outerdisplay
简介 PasteForm是贴代码推出的 “新一代CRUD” ,基于ABPvNext,目的是通过对Dto的特性的标注,从而实现管理端的统一UI,借助于配套的PasteBuilder代码生成器,你可以快速的为自己的项目构建后台管理端!目前管…...

sql数据库-权限控制-DCL
目录 常用权限类别 查询用户权限 举例 授予用户权限 删除权限 常用权限类别 权限说明ALL,ALL PRIVILEGES所有权限SELECT查询数据INSERT插入数据UPDATE修改数据DELETE删除数据ALTER修改表DROP删除数据库/表/视图CREATE创建数据库/表 查询用户权限 show grants for 用户名…...
【计组笔记】目录
【计组笔记】机器数表示及运算https://blog.csdn.net/Resurgence03/article/details/142673325?sharetypeblog&shareId142673325&sharereferAPP&sharesourceresurgence03&sharefromlink 【计组笔记】指令系统https://blog.csdn.net/Resurgence03/article/det…...
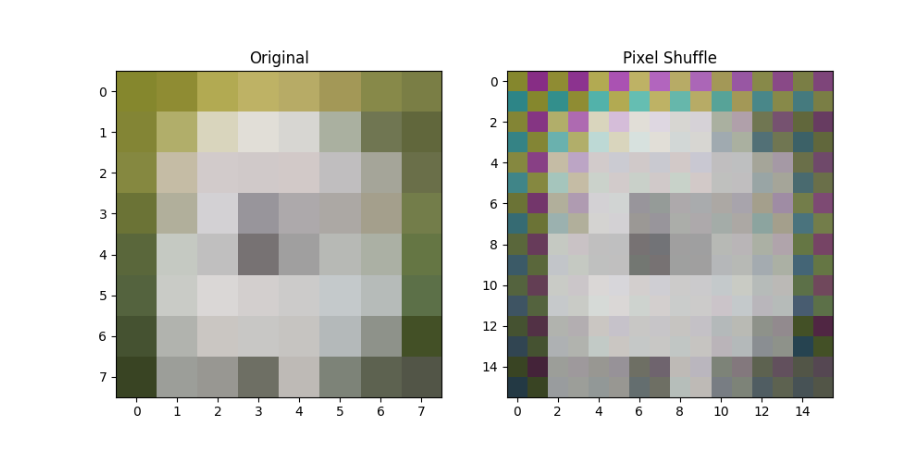
深度学习中的Pixel Shuffle和Pixel Unshuffle:图像超分辨率的秘密武器
在深度学习的计算机视觉任务中,提升图像分辨率和压缩特征图是重要需求。Pixel Shuffle和Pixel Unshuffle是在超分辨率、图像生成等任务中常用的操作,能够通过转换空间维度和通道维度来优化图像特征表示。本篇文章将深入介绍这两种操作的原理,…...

AntFlow 0.11.0版发布,增加springboot starter模块,一款设计上借鉴钉钉工作流的免费企业级审批流平台
AntFlow 0.11.0版发布,增加springboot starter模块,一款设计上借鉴钉钉工作流的免费企业级审批流平台 传统老牌工作流引擎比如activiti,flowable或者camunda等虽然功能强大,也被企业广泛采用,然后也存着在诸如学习曲线陡峭,上手难度大&#x…...

golang操作mysql基础驱动github.com/go-sql-driver/mysql使用
golang中类似java操作mysql的jdbc一样,github.com/go-sql-driver/mysql也为go提供了基础接口,在开发中往往需要写更多的代码来满足自己的定制需求,java在驱动基础上有了扩展,orm框架诞生,mybatis、jpa等都是好用的扩展…...

正则表达式完全指南,总结全面通俗易懂
目录 元字符 连接符 限定符 定位符 修饰符(标记) 运算符优先级 普通字符集及其替换 零宽断言 正向先行断言 负向先行断言 正向后发断言 负向后发断言 捕获组 普通捕获组 命名捕获组 PS:非捕获组 正则表达式在线测试: 正则在线测试工具 …...

运维面试题.云计算面试题之三ELK
1.ELK是什么? ELK 其实并不是一款软件,而是一整套解决方案,是三个软件产品的首字母缩写 Elasticsearch:负责日志检索和储存 Logstash:负责日志的收集和分析、处理 Kibana:负责日志的可视化 这三款软件都是开源软件,通常是配合使用,而且又先后归于 Elastic.co 公司名下,…...

C# DataTable使用Linq查询详解
前奏- C# 对DataTable进行查询 C# 可以对 DataTable 进行查询。在 .NET 框架中,DataTable 类提供了几种方法来查询数据,包括 Select 方法和 AsEnumerable 扩展方法(在 System.Data.DataSetExtensions 命名空间中)。 使用 Select…...

【企业级分布式系统】ELK优化
文章目录 Elasticsearch作为日志存储时的优化优化ES索引设置优化线程池配置锁定内存,不让JVM使用Swap减少分片数、副本数 Elasticsearch作为日志存储时的优化 linux内核优化、JVM优化、ES配置优化、架构优化(filebeat/fluentd代替logstash、加入kafka做…...

51单片机基础05 定时器
目录 一、为什么要定时器 二、定时器中断 1、定时器中断参数 2、定时器中断程序 3、定时器计数 一、为什么要定时器 前文提到,比如进行流水灯等操作,都是直接写了delay_ms这类操作。 但是在51单片机中,其一般就是靠双for进行的循环时延&…...

tdengine学习笔记实战-jdbc连接tdengine数据库
先上代码,里面有两种获取连接的方式,一个单例,一个连接池 package com.tdengine.utils;import com.alibaba.druid.pool.DruidDataSource;import java.sql.*; import java.util.Properties;public class TDConnectUtils {// 单例对象private …...

vue3项目执行npm install下载依赖报错问题排查方法
1、检查当前node与npm的版本 nodejs 和 npm 的版本是有适配的,具体可以看官网:nodejs 和 npm 的版本是有适配的 若是版本不兼容,修改node或者npm的版本即可,建议使用nvm版本管理工具,切换方便; 2、清除缓…...

【vue】项目迭代部署后 自动清除浏览器缓存
前言: vue项目打包部署上线后,因浏览器缓存问题,导致用户访问的依旧是上个迭代批次的旧资源,需要用户手动清除缓存才能更新至最新版本,影响用户体验。 解决方法: html根文件添加以下标签 <meta http-eq…...
)
Leetcode(滑动窗口习题思路总结,持续更新。。。)
讲解题目:长度最小的子数组 给定一个含有 n 个正整数的数组和一个正整数 target ,找出该数组中满足其和 ≥ target 的长度最小的连续子数组。如果不存在符合条件的连续子数组,返回 0。示例: 输入: target 7, nums [2,3,1,2,4,3] 输出: 2 解…...

【UNIAPP】uniapp版图片压缩工具
二次封装的uniapp版本图片压缩、上传工具,支持全端(H5、小程序、APP) 新建文件:file-util.js class FileUtil {/*** [文件上传]* param {[object]} fileObj [图片地址]* param {[object]} formData [参数]* param {[str…...

开源高级提示词数据库:一键部署,解锁AI生产力
1. 项目概述:一个开箱即用的高级提示词数据库如果你和我一样,经常在ChatGPT、Claude或者Midjourney这类AI工具里折腾,那你肯定明白一个道理:好的提示词(Prompt)就是生产力。但问题来了,那些真正…...

航拍UAV电力电缆巡检检测数据集_数据集第10027期
航拍UAV电力电缆巡检检测数据集_数据集第10027期 项目简介 面向无人机电力巡检场景的开源目标检测数据集,聚焦电力电缆识别任务,可用于电力线检测、植被与电力线安全距离监测等场景,助力电力巡检智能化。 数据集核心信息 数据规模:…...
)
BMS工程师必看:实测案例解析50-108MHz频段超标如何整改(滤波/接地/屏蔽实战)
BMS工程师实战指南:50-108MHz频段EMC超标问题深度解析与整改方案 当你在实验室看到传导骚扰测试曲线在50-108MHz频段持续突破GB/T18655-2010三级限值时,那种焦虑感每个BMS工程师都深有体会。这不是简单的测试失败,而是产品设计中隐藏的高频噪…...

PHP反序列化漏洞实战:从CTFshow F5杯‘eazy-unserialize’两道题,到文件包含与协议利用的完整避坑指南
PHP反序列化漏洞实战:从CTF题目到真实漏洞利用的深度解析 在CTF竞赛中,PHP反序列化漏洞一直是Web安全方向的热门考点。这类漏洞不仅考验选手对PHP语言特性的理解,更要求具备将多个知识点串联运用的能力。本文将以一道典型CTF题目为例…...

【信息科学与工程学】【通信工程】第五十九篇 面向SDN城域网网络的算法工程02
条目:SDN-Metro-0065 (IPoE入L3VPN业务) 字段 内容 1. 编号 SDN-Metro-0065 2. 类别 业务领域 / 接入与VPN 3. 领域 基于动态策略的IPoE用户接入L3VPN业务 4. 模型配方 IPoE(IP over Ethernet)用户通过以太网接入,并直接进入运营商的L3VPN网络,访问企业内…...

从用户态到内核态:Linux Hook技术的全景实践与攻防解析
1. Linux Hook技术入门:从概念到实践 第一次接触Hook技术是在十年前的一个安全分析项目中,当时需要监控某个可疑进程的行为。那时候我才明白,原来Linux系统里藏着这么多可以"截胡"程序执行的秘密通道。简单来说,Hook技术…...
)
告别手动重命名!Win10下用记事本写个.bat脚本,5分钟搞定图片批量编号(001.jpg到999.jpg)
零基础玩转Windows批量重命名:用记事本5分钟打造专属文件编号神器 每次旅行归来或项目结束,手机相册里堆积如山的照片总让人头疼——"IMG_20230401_123456.jpg"这类毫无规律的命名,既难查找又难管理。专业摄影师和自媒体博主们早就…...

RapidIO多播技术原理与应用实践
1. RapidIO多播技术概述 在分布式计算和高速互连系统中,多播(Multicast)技术扮演着至关重要的角色。简单来说,多播就像是在会议室里用广播系统发布通知——只需说一次,所有打开扬声器的房间都能同时听到。RapidIO作为高…...

惠来海康医院眼科母亲节:愿岁月温柔,护她眼底有光
惠来海康医院眼科母亲节:愿岁月温柔,护她眼底有光五月浅夏,暖意氤氲,当康乃馨的芬芳漫过街巷,母亲节便载着满心敬意如期而至。母亲,是岁月里最温柔的守望者,用一双眼眸,藏下对我们所…...

如何彻底解决Minecraft离线启动限制:PrismLauncher-Cracked完全指南
如何彻底解决Minecraft离线启动限制:PrismLauncher-Cracked完全指南 【免费下载链接】PrismLauncher-Cracked This project is a Fork of Prism Launcher, which aims to unblock the use of Offline Accounts, disabling the restriction of having a functional O…...