鱼眼相机模型-MEI
参考文献: Single View Point Omnidirectional Camera Calibration from Planar Grids
1. 相机模型如下:


// 相机坐标系下的点投影到畸变图像// 输入:相机坐标系点坐标cam 输出: 畸变图像素点坐标disPtvoid FisheyeCamAdapter::cam2DistImg(cv::Point3f &cam, cv::Point2f &disPt){double r = cv::norm(cam);double dx_u = 0, dy_u = 0;if (r != 0){cv::Point3f ps = cam / r;double x = ps.x / (ps.z + camInt.fXi);double y = ps.y / (ps.z + camInt.fXi);distortion(x, y, &dx_u, &dy_u);x += dx_u;y += dy_u;disPt.x = x * camInt.fGammaX + camInt.fCx;disPt.y = y * camInt.fGammaY + camInt.fCy;}else{disPt.x = camInt.fCx;disPt.y = camInt.fCy;}}// 无畸变图像到畸变图像void FisheyeCamAdapter::distortion(double mx_u, double my_u, double *dx_u, double *dy_u){double mx2_u = 0., my2_u = 0., mxy_u = 0., rho2_u = 0., rad_dist_u = 0.;double k1 = camInt.distortCoeff[0];double k2 = camInt.distortCoeff[1];double p1 = camInt.distortCoeff[2];double p2 = camInt.distortCoeff[3];double k5 = camInt.distortCoeff[4];mx2_u = mx_u * mx_u;my2_u = my_u * my_u;mxy_u = mx_u * my_u;rho2_u = mx2_u + my2_u;rad_dist_u = k1 * rho2_u + k2 * rho2_u * rho2_u + k5 * rho2_u * rho2_u * rho2_u;*dx_u = mx_u * rad_dist_u + 2 * p1 * mxy_u + p2 * (rho2_u + 2 * mx2_u);*dy_u = my_u * rad_dist_u + 2 * p2 * mxy_u + p1 * (rho2_u + 2 * my2_u);}反投影过程:畸变图中的像素坐标计算相机坐标系下坐标

cv::Point3f FisheyeCamAdapter::pointDis2Camera(const cv::Point2f &disPoint){double mx_d, my_d, mx_u, my_u;double lambda;double xi = camInt.fXi;// Lift points to normalised planefloat inv_K11 = 1 / camInt.fGammaX;float inv_K13 = -camInt.fCx / camInt.fGammaX;float inv_K22 = 1 / camInt.fGammaY;float inv_K23 = -camInt.fCy / camInt.fGammaY;mx_d = inv_K11 * (disPoint.x) + inv_K13;my_d = inv_K22 * (disPoint.y) + inv_K23;undistortGN(mx_d, my_d, &mx_u, &my_u, 100); // 去畸变坐标// Lift normalised points to the sphere (inv_hslash)cv::Point3f camera;if (xi == 1){lambda = 2 / (mx_u * mx_u + my_u * my_u + 1);camera.x = lambda * mx_u;camera.y = lambda * my_u;camera.z = lambda - 1;}else{double sqrt_i = 1.0 + (1.0 - xi * xi) * (mx_u * mx_u + my_u * my_u);if (sqrt_i < 0){camera.x = -1000000;camera.y = -1000000;camera.z = 1;}else{lambda = (xi + sqrt(sqrt_i)) / (1.0 + mx_u * mx_u + my_u * my_u);camera.x = lambda * mx_u;camera.y = lambda * my_u;camera.z = lambda - xi;}}return camera;}相关文章:
鱼眼相机模型-MEI
参考文献: Single View Point Omnidirectional Camera Calibration from Planar Grids 1. 相机模型如下: // 相机坐标系下的点投影到畸变图像// 输入:相机坐标系点坐标cam 输出: 畸变图像素点坐标disPtvoid FisheyeCamAdapter::…...

GPT系列文章
GPT系列文章 GPT1 GPT1是由OpenAI公司发表在2018年要早于我们之前介绍的所熟知的BERT系列文章。总结:GPT 是一种半监督学习,采用两阶段任务模型,通过使用无监督的 Pre-training 和有监督的 Fine-tuning 来实现强大的自然语言理解。在 Pre-t…...
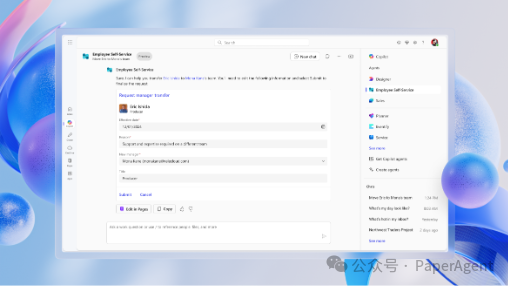
微软Ignite 2024:建立一个Agentic世界!
在今年的Microsoft Ignite 2024上,AI Agent无疑成为本次大会的重点,已经有十万家企业通过Copilot Studio创建智能体了。微软更是宣布:企业可以在智能体中,使用Azure目录中1800个LLM中的任何一个模型了! 建立一个Agent…...

windows C#-属性
属性提供了一种将元数据或声明性信息与代码(程序集、类型、方法、属性等)关联的强大方法。将属性与程序实体关联后,可以使用称为反射的技术在运行时查询该属性。 属性具有以下属性: 属性将元数据添加到您的程序中。元数据是有关程序中定义的类型的信息…...

深入浅出:JVM 的架构与运行机制
一、什么是JVM 1、什么是JDK、JRE、JVM JDK是 Java语言的软件开发工具包,也是整个java开发的核心,它包含了JRE和开发工具包JRE,Java运行环境,包含了JVM和Java的核心类库(Java API)JVM,Java虚拟…...
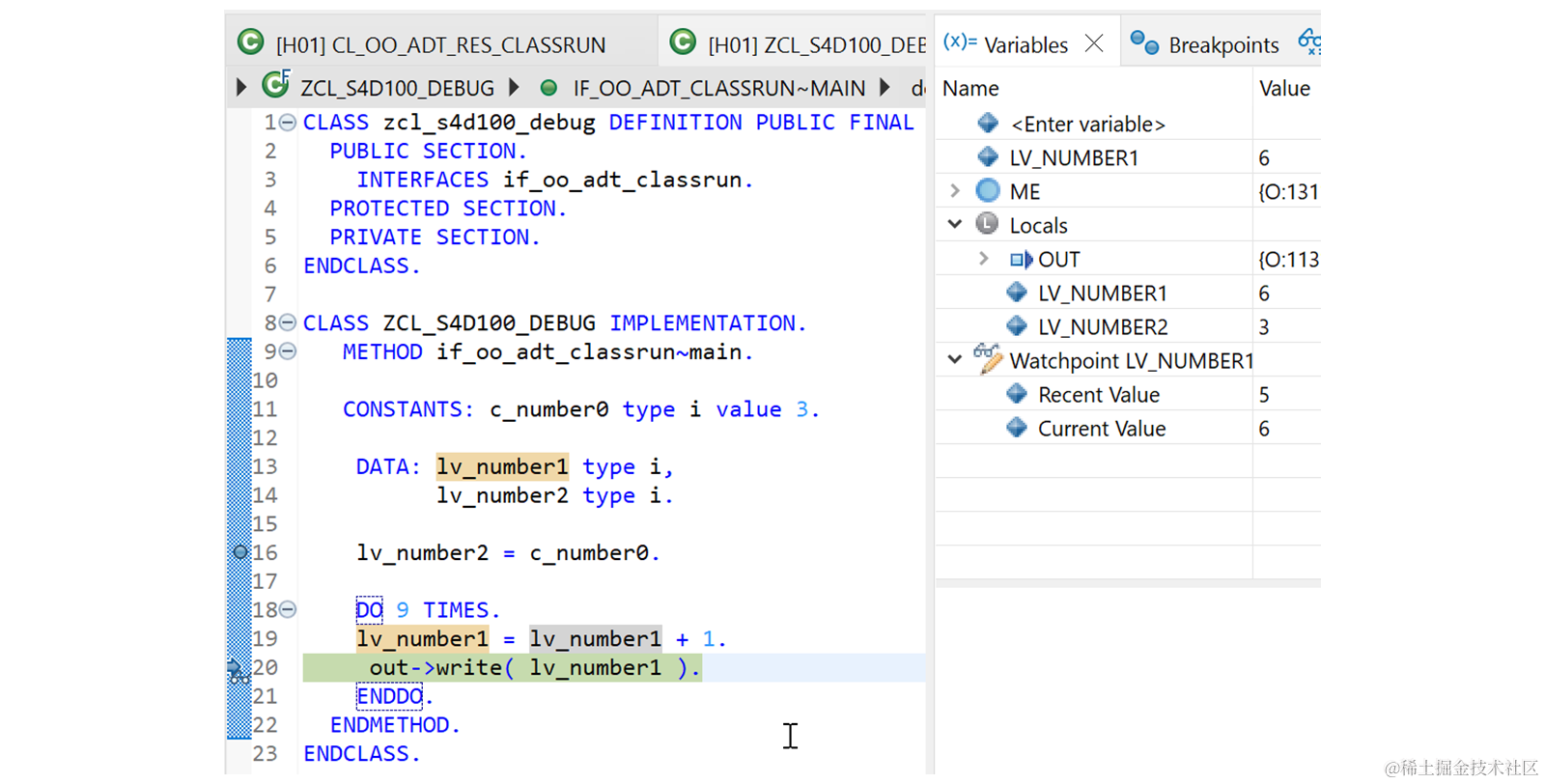
如何在 Eclipse 中调试ABAP程序
原文链接:Debugging an ABAP Program ADT 中的调试器是一个重要的诊断工具,可用于分析 ABAP 应用程序。 使用调试器,您可以通过在运行时 Debug 单步执行(F5)程序来确定程序无法正常工作的原因。这使您可以看到正在执…...

websocket是什么?
一、定义 Websocket是一种在单个TCP连接上进行全双工通信的协议,它允许服务器主动向客户端推送数据,而不需要客户端不断的轮询服务器来获取数据 与http协议不同,http是一种无状态的,请求,响应模式的协议(单向通信)&a…...

Java项目实战II基于微信小程序的图书馆自习室座位预约平台(开发文档+数据库+源码)
目录 一、前言 二、技术介绍 三、系统实现 四、文档参考 五、核心代码 六、源码获取 全栈码农以及毕业设计实战开发,CSDN平台Java领域新星创作者,专注于大学生项目实战开发、讲解和毕业答疑辅导。 一、前言 在知识爆炸的时代,图书馆和…...
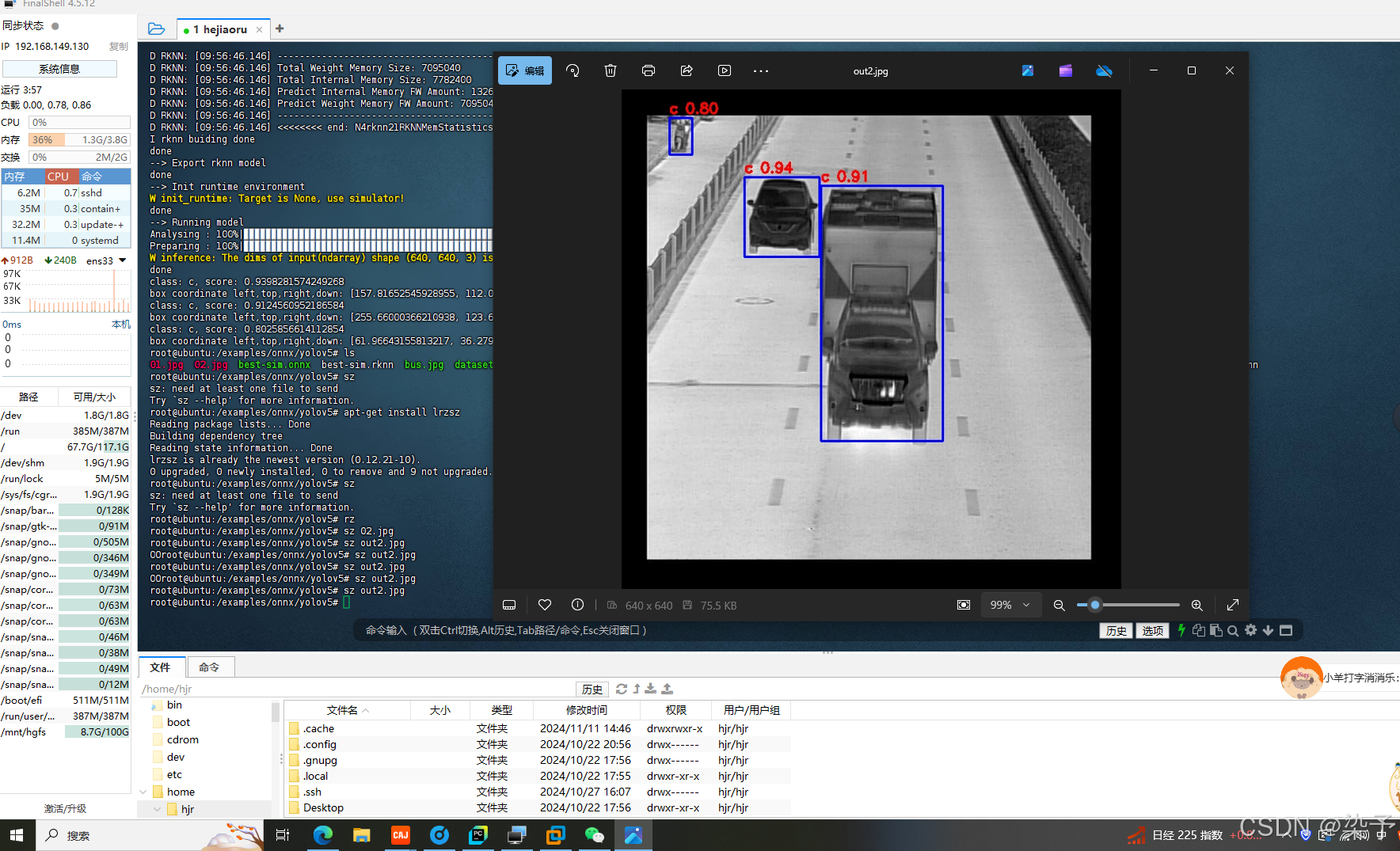
5.算法移植第六篇YOLOV5 /onnx模型转换成rknn
上两篇文章讲述了pytorch模型下best.pt转换成onnx模型,以及将onnx进行简化成为best-sim.onnx, 接下来这篇文章讲述如何将onnx模型转换成rknn模型,转换成该模型是为了在rk3568上运行 1.创建share文件夹 文件夹包含以下文件best-sim.onnx,rknn-tookit2-…...

微知-DOCA SDK中如何编译一个sample?如何运行?(meson /tmp/xxx; meson compile -C /tmp/xxx)
文章目录 快速回忆背景前期准备DOCA SDK中的例子情况编译编译request编译responser 执行测试启动响应端启动请求端查看响应端 综述参考 快速回忆 # 生成编译目录和相关文件 cd /opt/mellanox/doca/samples/doca_rdma/rdma_write_requester meson /tmp/req #将编译目录指定到/t…...
)
【Leetcode 每日一题】146. LRU 缓存(c++)
146. LRU 缓存 请你设计并实现一个满足 LRU (最近最少使用) 缓存 约束的数据结构。 实现 LRUCache 类: LRUCache(int capacity) 以 正整数 作为容量 capacity 初始化 LRU 缓存int get(int key) 如果关键字 key 存在于缓存中,则返回关键字的值&#x…...
lnq(x)还是q(x)lnq(x)?)
【机器学习】近似分布的熵到底是p(x)lnq(x)还是q(x)lnq(x)?
【1】通信的定义 信息量(Information Content)是信息论中的一个核心概念,用于定量描述一个事件发生时所提供的“信息”的多少。它通常用随机变量 𝑥的概率分布来定义。事件 𝑥发生所携带的信息量由公式给出࿱…...

网络安全,文明上网(6)网安相关法律
列举 1. 《中华人民共和国网络安全法》: - 这是中国网络安全的基本法律,于2017年6月1日开始实施。该法律明确了网络运营者的安全保护义务,包括采取数据分类、重要数据备份和加密等措施。 2. 《中华人民共和国数据安全法》: …...
)
网络安全学习74天(记录)
11.21日,今天学习了 app抓包(需要的工具charles(激活),夜神模拟器,postern,) 思路:首先charles需要抓取的app的包,需要的是装证书,将charles的证…...

Spring Boot 实战:基于 Validation 注解实现分层数据校验与校验异常拦截器统一返回处理
1. 概述 本文介绍了在spring boot框架下,使用validation数据校验注解,针对不同请求链接的前端传参数据,进行分层视图对象的校验,并通过配置全局异常处理器捕获传参校验失败异常,自动返回校验出错的异常数据。 2. 依赖…...

20241125复盘日记
昨日最票: 南京化纤 滨海能源 广博股份 日播时尚 众源新材 返利科技 六国化工 丰华股份 威领股份 凯撒旅业 华扬联众 泰坦股份 高乐股份高均线选股: 理邦仪器高乐股份日播时尚领湃科技威领股份资金最多的票: 资金攻击最多的票: …...

【Excel】拆分多个sheet,为单一表格
Private Sub 分拆工作表() Application.ScreenUpdating True 让屏幕显示操作过程, Dim sht As Worksheet Dim MyBook As Workbook Set MyBook ActiveWorkbook For Each sht In MyBook.Sheets If sht.Visible True Then 隐藏的sheet跳过,否则会报1004无…...
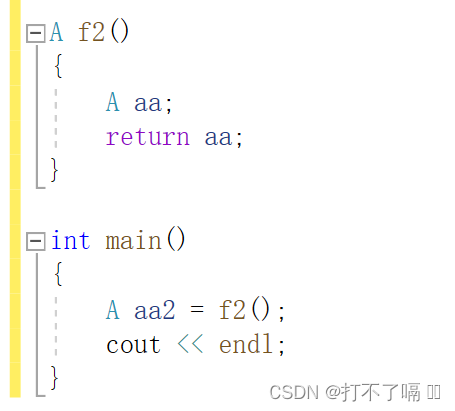
类和对象plus版
一.类的定义 1.1类定义的格式 图中class为关键字,Stack为类的名字,用{}框住类的主体,类定义完后;不能省略。 为了区分成员变量,一般习惯在成员变量前面或后面加一个特殊标识,_或者m_ 1.2访问限定符 c采用…...

shell练习
开篇小贴士:为创建的sh(当然可以是任何一个文件)文件添加开头的注释 1、进入到家目录,然后通过 ls -a 查看全部文件 2、找到并编辑一个名为 .vimrc (Vim编辑器的核心配置文件)的配置文件,下图…...
ApiChain 从迭代到项目 接口调试到文档生成单元测试一体化工具
项目地址:ApiChain 项目主页 ApiChain 简介 ApiChain 是一款类似 PostMan 的接口网络请求与文档生成软件,与 PostMan 不同的是,它基于 项目和迭代两个视角管理我们的接口文档,前端和测试更关注版本迭代中发生变更的接口编写代码…...
)
AI原生图计算应用落地全景图(SITS 2026权威白皮书核心精要)
更多请点击: https://intelliparadigm.com 第一章:AI原生图计算应用:SITS 2026图神经网络工程化方案 SITS 2026 是面向大规模动态图场景的AI原生图计算框架,深度融合GNN训练、图拓扑实时更新与边缘-云协同推理能力。其核心设计摒…...

规格驱动营销:用AI代理与工程化思维打造Twitter增长自动化
1. 项目概述:一个为AI SaaS产品设计的Twitter营销自动化工具包如果你正在开发一款AI SaaS产品,并且已经为产品上线后的Twitter营销感到焦虑——不知道如何规划内容、如何与用户互动、如何将推文流量转化为实际用户——那么你很可能需要一套系统化的方法&…...

矩阵本地化获客技术落地:同城流量精准匹配与合规运营方案
前言同城本地化流量是短视频生态中转化率最高、精准度最强的流量赛道,广泛适配本地生活服务、实体门店、同城咨询、区域服务商等各类业态。相比于泛全域流量,同城用户具备明确的地域消费属性、就近服务需求,成交意向更强烈,获客落…...

让Linux桌面工作流更高效:Sticky便签应用深度解析
让Linux桌面工作流更高效:Sticky便签应用深度解析 【免费下载链接】sticky A sticky notes app for the linux desktop 项目地址: https://gitcode.com/gh_mirrors/stic/sticky 在Linux桌面环境中,快速记录和访问临时信息是每个用户都会遇到的日常…...

嵌入式开发十年痛点解析:技术栈、多核与安全的实战解法
1. 从一场会议邀约说起:嵌入式程序员的“午夜惊魂”前几天整理旧资料,翻到了2014年嵌入式系统大会(ESC)编程专题的公开征集帖,发起人是当时ARM的培训经理Chris Shore。帖子标题很有意思,叫“什么让你夜不能…...

知识图谱与量化LLM协同架构解析与应用
1. 知识图谱与量化LLM协同架构解析在自然语言处理领域,知识图谱(KG)与大型语言模型(LLM)的协同正展现出独特价值。这种架构的核心在于发挥两者的互补优势:KG提供结构化、可验证的语义网络,而LLM…...

别再只玩开发板了!用吃灰的STM32核心板DIY一个专属游戏手柄,实战HID协议
从零构建STM32游戏手柄:深入解析HID协议与实战开发 你是否曾盯着抽屉里积灰的STM32核心板思考它能做什么?与其重复点亮LED的基础实验,不如挑战一个既实用又有趣的项目——打造专属游戏手柄。这不仅能让硬件资源重获新生,更是深入理…...

告别IDEA编译警告:深入解析JDK版本过时问题与多维度解决方案
1. 当IDEA开始"抱怨":那些烦人的编译警告从哪来? 每次打开老项目,总能看到那个熟悉的黄色警告:"Warning:java: 源值1.5已过时,将在未来所有发行版中删除"。这个提示就像个唠叨的老朋友,…...

工业物联网长距离蓝牙环境监测方案解析
1. 项目概述在工业物联网和远程环境监测领域,如何实现低功耗、长距离的数据传输一直是个技术难点。传统蓝牙技术受限于通信距离(通常10米以内),而Wi-Fi方案又面临功耗过高的问题。最近我在一个工厂环境监测项目中,成功…...

告别编译噩梦:在Ubuntu 22.04上为你的C++项目搞定Abseil依赖的三种方法
告别编译噩梦:在Ubuntu 22.04上为你的C项目搞定Abseil依赖的三种方法 在C项目的开发过程中,依赖管理一直是开发者面临的一大挑战。特别是对于现代C项目而言,如何高效、可靠地引入和管理第三方库,往往决定了项目的开发效率和最终质…...