海康面阵、线阵、读码器及3D相机接线说明
为帮助用户快速了解和配置海康系列设备的接线方式,本文将针对海康面阵相机、线阵相机、读码器和3D相机的主要接口及接线方法进行全面整理和说明。

一、海康面阵相机接线说明
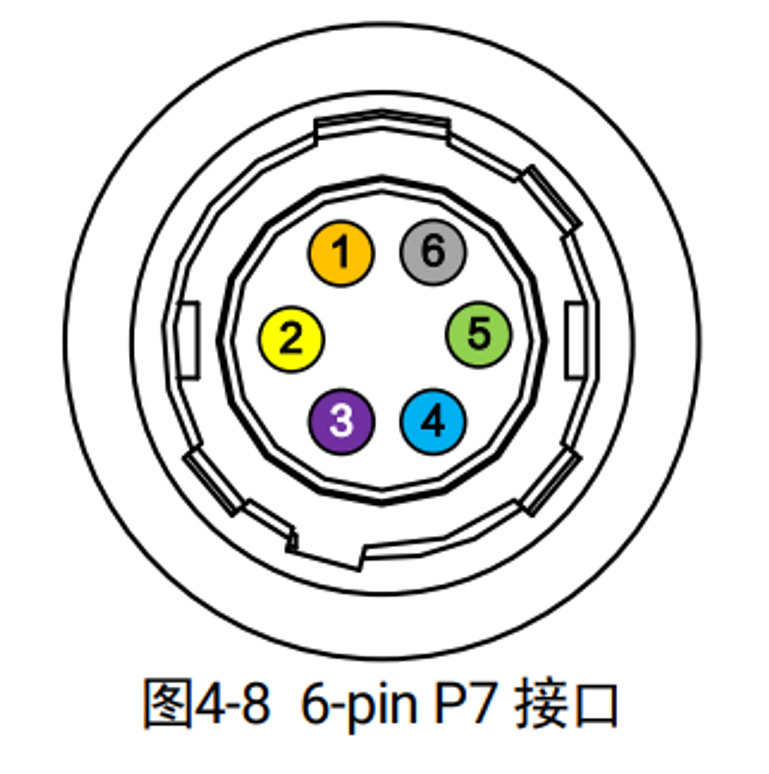
海康面阵相机使用6-pin P7接口,其功能设计包括电源输入、光耦隔离信号输入输出,以及GPIO通用接口。
1. 接口引脚定义
| 引脚 | 线芯颜色 | 信号 | I/O信号源 | 说明 |
|---|---|---|---|---|
| 1 | 橙 | DC_PWR | – | 相机电源 |
| 2 | 黄 | OPTO_IN | Line 0+ | 光耦隔离输入 |
| 3 | 紫 | GPIO | Line 2+ | 可配置输入或输出 |
| 4 | 蓝 | OPTO_OUT | Line 1+ | 光耦隔离输出 |
| 5 | 绿 | OPTO_GND | Line 0-/1- | 光耦隔离信号地 |
| 6 | 灰 | GND | Line 2- | 相机电源地 |
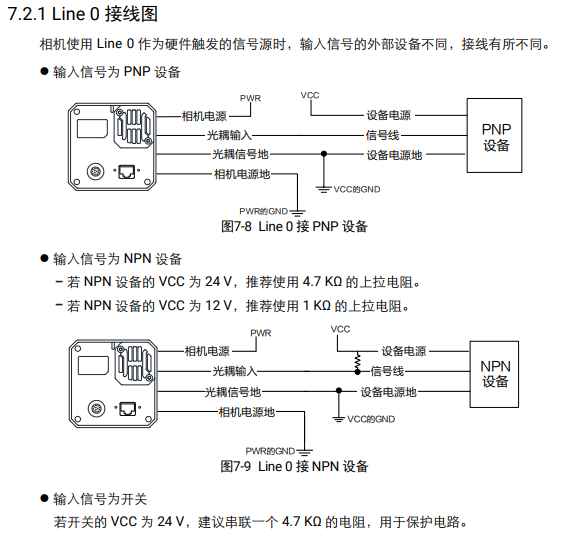
2. 接线说明
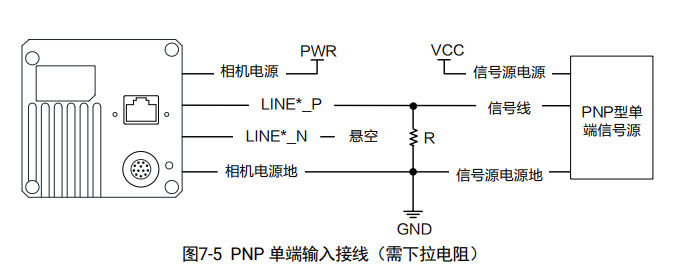
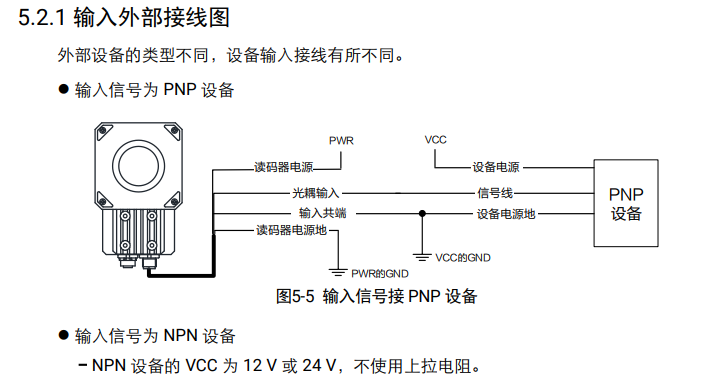
- PNP输入设备接线:输入信号为PNP设备时,VCC需接24V,并通过4.7kΩ上拉电阻稳定信号。
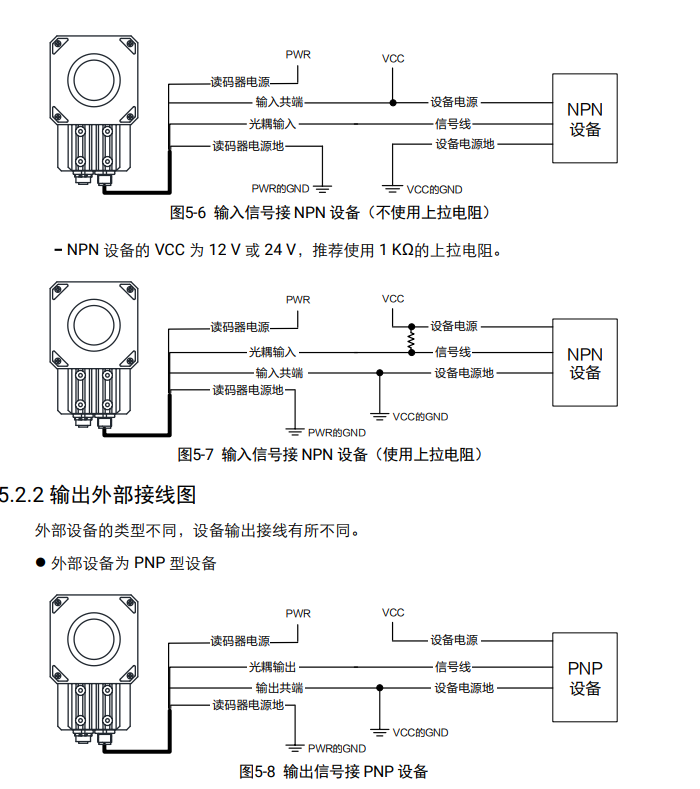
- NPN输入设备接线:NPN设备VCC为12V时,推荐使用1kΩ上拉电阻。
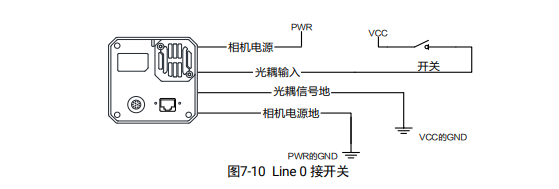
- 开关信号输入接线:输入信号接开关时,建议串联4.7kΩ电阻保护电路。
二、海康线阵相机接线说明
海康线阵相机采用12-pin P10接口,支持多路差分输入输出信号。

1. 接口引脚定义
| 引脚 | 线芯颜色 | 信号 | I/O信号源 | 说明 |
|---|---|---|---|---|
| 1 | 黑 | GND | – | 电源地 |
| 2 | 红 | DC_PWR | – | 直流电源正 |
| 3 | 白/蓝 | LINE0_P | Line 0+ | 差分输入输出IO 0 正 |
| 4 | 白/橙 | LINE0_N | Line 0- | 差分输入输出IO 0 负 |
| 5 | 白 | GND | – | 电源地 |
| 6 | 白/绿 | LINE3_P | Line 3+ | 差分输入输出IO 3 正 |
| 7 | 橙 | LINE3_N | Line 3- | 差分输入输出IO 3 负 |
| 8 | 棕 | LINE4_P | Line 4+ | 差分输入输出IO 4 正 |
| 9 | 灰 | LINE4_N | Line 4- | 差分输入输出IO 4 负 |
| 10 | 蓝 | LINE1_P | Line 1+ | 差分输入输出IO 1 正 |
| 11 | 紫 | LINE1_N | Line 1- | 差分输入输出IO 1 负 |
| 12 | 黄 | LINE4_N | Line 4- | 差分输入输出IO 4 负 |
2. 接线说明
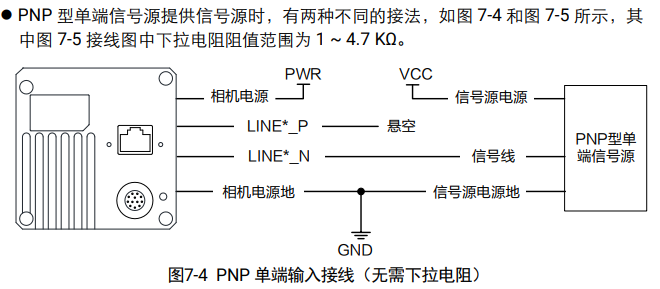
- PNP输入设备:信号正极接VCC,通过4.7kΩ电阻连接。
- NPN输入设备:推荐1~10kΩ上拉电阻以稳定信号。

- 差分输出设备:差分信号正负端分别接外部设备对应正负端。


三、海康读码器接线说明
海康读码器使用12-pin M12接口,提供光耦隔离输入输出及串口通信功能。

1. 接口引脚定义
| 引脚 | 线芯颜色 | 信号 | I/O信号源 | 说明 |
|---|---|---|---|---|
| 1 | 白 | DC_PWR | – | 直流电源正 |
| 2 | 棕 | GND | – | 电源地 |
| 3 | 绿 | OPTO_OUT3 | I/O隔离输出3 | 输出信号3 |
| 4 | 黄 | OPTO_OUT4 | I/O隔离输出4 | 输出信号4 |
| 5 | 灰 | OPTO_OUT5 | I/O隔离输出5 | 输出信号5 |
| 6 | 粉 | OUT_COM | 输出信号公共地 | 输出共端 |
| 7 | 蓝 | OPTO_IN0 | I/O隔离输入0 | 输入信号0 |
| 8 | 红 | OPTO_IN1 | I/O隔离输入1 | 输入信号1 |
| 9 | 橙 | OPTO_IN2 | I/O隔离输入2 | 输入信号2 |
| 10 | 紫 | IN_COM | 输入信号公共地 | 输入共端 |
| 11 | 灰/粉 | RS-232_R | – | 232串口输入 |
| 12 | 红/蓝 | RS-232_T | – | 232串口输出 |
2. 接线说明
- PNP输入设备:信号线与VCC接入。
-
NPN输入设备:12V或24V时,建议串联1kΩ电阻稳定信号。
-
光耦隔离输出:通过OUT_COM公共端连接信号设备输入端。
四、海康3D相机接线说明
海康3D相机采用12-pin M12接口,支持差分信号输入输出及RS-232串口通信。

1. 接口引脚定义
| 引脚 | 线芯颜色 | 信号 | I/O信号源 | 说明 |
|---|---|---|---|---|
| 1 | 白 | POWER_IN | – | 直流电源正 |
| 2 | 棕 | GND | – | 电源地 |
| 3 | 绿 | IO_OUT1_P | Line 1+ | 差分输出IO 1正 |
| 4 | 黄 | IO_OUT1_N | Line 1- | 差分输出IO 1负 |
| 5 | 灰 | IO_IN0_N | Line 0- | 差分输入IO 0负 |
| 6 | 粉 | IO_IN0_P | Line 0+ | 差分输入IO 0正 |
| 7 | 红 | IO_IN3_P | Line 3+ | 差分输入IO 3正 |
| 8 | 黑 | IO_IN3_N | Line 3- | 差分输入IO 3负 |
| 9 | 蓝 | IO_IN6_N | Line 6- | 差分输入IO 6负 |
| 10 | 紫 | IO_IN6_P | Line 6+ | 差分输入IO 6正 |
| 11 | 灰/粉 | 232_RXD | – | 232串口输入 |
| 12 | 红/蓝 | 232_TXD | – | 232串口输出 |
2. 接线说明
-
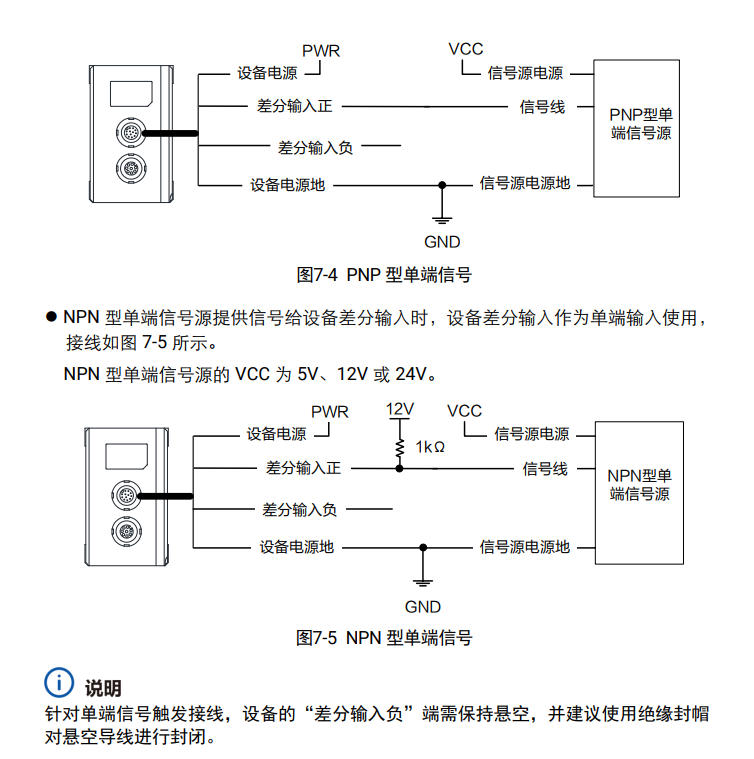
PNP单端信号:信号正极接差分正端,负端悬空绝缘。
-
NPN单端信号:串联1kΩ电阻连接差分正端,负端悬空。

总结
海康系列相机和读码器的接线方式灵活,涵盖多种信号输入输出需求。用户在接线过程中需特别注意以下几点:
- 根据设备类型选择适配的输入输出模式(PNP或NPN)。
- 使用推荐的电阻值保护电路,确保信号稳定。
- 正确连接电源和地线,避免损坏设备。
以上信息为海康设备的接线配置提供了全面参考,助力用户高效完成设备连接与调试。
相关文章:
海康面阵、线阵、读码器及3D相机接线说明
为帮助用户快速了解和配置海康系列设备的接线方式,本文将针对海康面阵相机、线阵相机、读码器和3D相机的主要接口及接线方法进行全面整理和说明。 一、海康面阵相机接线说明 海康面阵相机使用6-pin P7接口,其功能设计包括电源输入、光耦隔离信号输入输出…...

AI与ArcGIS Pro的地理空间分析和可视化
AI思维已经成为一种必备的能力,ArcGIS Pro3的卓越性能与ChatGPT的智能交互相结合,将会为您打造了一个全新的工作流程! 那么如何将火热的ChatGPT与ArcGIS Pro3相结合,使我们无需自己进行复杂的编程,通过强大的ChatGPT辅助我们完成地…...

详解HTML5语言
文章目录 前言任务一 认识HTML5任务描述:知识一 HTML5基础知识 任务二 HTML 5语义元素任务描述:知识一 HTML5新增结构元素知识二 HTML5文本语义元素 总结 前言 HTML5是一个新的网络标准,现在仍处于发展阶段。目标是取代现有的HTML 4.01和XHT…...

docker compose一键启动ES集群和kibana
集群启用了XPACK后,只有第一次可以启动成功。要是宕机了。就启动不了了。(除非删除data目录所有数据)生产环境 启用了后 建议配置 自定义证书。 services:es01:image: "docker.elastic.co/elasticsearch/elasticsearch:7.17.25"co…...

遗传算法与深度学习实战(25)——使用Keras构建卷积神经网络
遗传算法与深度学习实战(25)——使用Keras构建卷积神经网络 0. 前言1. 卷积神经网络基本概念1.1 卷积1.2 步幅1.3 填充1.4 激活函数1.5 池化 2. 使用 Keras 构建卷积神经网络3. CNN 层的问题4. 模型泛化小结系列链接 0. 前言 卷积神经网络 (Convolution…...

pytest+allure生成报告显示loading和404
pytestallure执行测试脚本后,通常会在电脑的磁盘上建立一个临时文件夹,里面存放allure测试报告,但是这个测试报告index.html文件单独去打开,却显示loading和404, 这个时候就要用一些办法来解决这个报告显示的问题了。 用命令产生…...

为何划分 Vue 项目结构组件?划分结构和组件解决了什么问题?为什么要这么做?
在一个大型 Vue 项目中,合理的目录结构和组件划分至关重要。良好的结构可以提高开发效率,减少维护成本,并使得团队合作更加顺畅。下面我将详细讲解如何在 Vue 项目中进行目录结构和组件划分,并结合实际项目代码示例进行说明。 1. 为什么要划分结构和组件? 1.1 提高可维护…...

springboot中使用mongodb完成评论功能
pom文件中引入 <!-- mongodb --> <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-data-mongodb</artifactId> </dependency> yml中配置连接 data:mongodb:uri: mongodb://admin:1234561…...

Dubbo的RPC泛化调用
目录 一、RPC泛化调用的应用场景 二、Dubbo RPC泛化调用的实现原理 三、Dubbo RPC泛化调用的实现步骤 四、示例代码 五、泛化调用怎么发现提供该接口的服务及服务的IP和端口? Dubbo的RPC泛化调用是一种在调用方没有服务方提供的API的情况下,对服务方…...

【k8s深入理解之 Scheme】全面理解 Scheme 的注册机制、内外部版本、自动转换函数、默认填充函数、Options等机制
参考 【k8s基础篇】k8s scheme3 之序列化_基于schema进行序列化-CSDN博客【k8s基础篇】k8s scheme4 之资源数据结构与资源注册_kubernetes 的scheam-CSDN博客常见问题答疑 【k8s深入理解之 Scheme 补充-1】理解 Scheme 中资源的注册以及 GVK 和 go 结构体的映射-CSDN博客【k8s深…...

接口性能优化宝典:解决性能瓶颈的策略与实践
目录 一、直面索引 (一)索引优化的常见场景 (二)如何检查索引的使用情况 (三)如何避免索引失效 (四)强制选择索引 二、提升 SQL 执行效率 (一)避免不必…...

雨晨 Windows Server 2025 数据中心 极简 26311.5000
文件: 雨晨 Windows Server 2025 数据中心 极简 26311.5000 install.esd 大小: 1740910278 字节 修改时间: 2024年11月29日, 星期五, 19:00:20 MD5: 5B946B9DED569E04917E804B25A0F736 SHA1: E78BB430B3E0397F6ACFEB821CF85EA7CFB5A00F CRC32: B3F76BD7 常规制作旨在测试YCDIS…...

关于IDE的相关知识之三【插件安装、配置及推荐的意义】
成长路上不孤单😊😊😊😊😊😊 【14后😊///C爱好者😊///持续分享所学😊///如有需要欢迎收藏转发///😊】 今日分享关于ide插件安装、配置及推荐意义的相关内容…...

JSP+Servlet实现列表分页功能
分享一种最简单的JSPServlet实现分页的方式! 旧:无分页功能的查询列表功能,仅供参考! Servlet try {Connection conn null;PreparedStatement ps null;ResultSet rs null;List<Dept> arrayList null;conn DBUtil.get…...

操作系统存储器相关习题
1 为什么要配置层次式存储器? 设置多个存储器可以使存储器两端的硬件能并行工作; 采用多级存储系统特别是Cache技术,是减轻存储器带宽对系统性能影响的最佳结构方案; 在微处理机内部设置各种缓冲存储器,减轻对存储器存取的压力。…...

QUICK 调试camera-xml解析
本文主要介绍如何在QUICK QCS6490使能相机模组。QCS6490的相机基于CameraX的框架,只需通过配置XML文件,设置相机模组的相关参数,就可以点亮相机。本文主要介绍Camera Sensor Module XML和Camera Sensor XML配置的解析,这中间需要c…...

【linux】shell脚本编写基础
shell 脚本关键字: 1、变量定义:前后不能空格 输入: zhao"Joe" echo ${zhao} echo "I am ${zhao}" 输出: yuxin I am Joe2、echo 输出 输入: echo "123" 输出: 1233、readonly 定义变…...

STM32 外设简介
STM32 外设简介 STM32 是由意法半导体 (STMicroelectronics) 开发的一系列基于 ARM Cortex 内核的微控制器,广泛应用于嵌入式系统中。STM32 系列的一个重要特点是其丰富而强大的外设模块,支持多种接口和功能,能满足工业控制、物联网、消费电…...

Django-Vue3-Admin - 现代化的前后端分离权限管理系统
项目介绍 Django-Vue3-Admin是一个基于RBAC(Role-Based Access Control)模型的综合性基础开发平台,专注于权限控制,支持列级别的细粒度权限管理。该项目采用前后端分离架构,技术栈包括: 后端: Django Django REST …...

Cesium K-means自动聚合点的原理
Cesium K-means自动聚合点的原理 Cesium 是一个开源的 JavaScript 库,用于在 Web 环境中创建 3D 地球和地图应用。它能够处理地理空间数据,并允许开发者对大规模的地理数据进行可视化展示。在一些应用中,尤其是当处理大量地理坐标点时&#…...

给文科生的NetLogo入门指南:不用写代码,5分钟看懂‘种族隔离’模型背后的逻辑
给文科生的NetLogo入门指南:不用写代码,5分钟看懂‘种族隔离’模型背后的逻辑 当你第一次听说"用计算机模拟社会现象"时,脑海中浮现的可能是复杂的数学公式和令人望而生畏的代码行。但NetLogo这款工具彻底颠覆了这种认知——它让社…...
)
2023B卷,阿里巴巴找黄金宝箱(4)
👨⚕️ 主页: gis分享者 👨⚕️ 感谢各位大佬 点赞👍 收藏⭐ 留言📝 加关注✅! 👨⚕️ 收录于专栏:华为OD面试 文章目录 一、🍀前言 1.1 ☘️题目详情 1.2 ☘️参考解题答案 一、🍀前言 2023B卷,阿里巴巴找黄金宝箱(4)。 1.1 ☘️题目详情 题目:…...

如何用JPlag守护代码原创性:5分钟快速上手指南
如何用JPlag守护代码原创性:5分钟快速上手指南 【免费下载链接】JPlag State-of-the-Art Source Code Plagiarism & Collusion Detection. Check for plagiarism in a set of programs. 项目地址: https://gitcode.com/gh_mirrors/jp/JPlag 你是否曾担心…...

如何零成本测试ZPL标签?Virtual ZPL Printer终极解决方案揭秘
如何零成本测试ZPL标签?Virtual ZPL Printer终极解决方案揭秘 【免费下载链接】Virtual-ZPL-Printer An ethernet based virtual Zebra Label Printer that can be used to test applications that produce bar code labels. 项目地址: https://gitcode.com/gh_mi…...

自建链接管理服务OtterLink:从部署到实战的完整指南
1. 项目概述:一个链接管理的“瑞士军刀” 最近在折腾个人知识库和内容分发,发现一个痛点:手头攒了太多链接。技术文章、工具网站、项目仓库、临时笔记链接……散落在浏览器书签、聊天记录、备忘录里,时间一长要么找不到ÿ…...

从零上手向量数据库:基于Pinecone官方示例构建AI应用实战指南
1. 项目概述:从零上手向量数据库与AI应用开发如果你对AI应用开发感兴趣,尤其是想了解如何让大语言模型(LLM)拥有“记忆”,或者想构建一个能理解语义而非关键词的智能搜索系统,那么你很可能已经听说过“向量…...

AI开发配置管理利器aiworkspace:实现多项目技能与提示词集中分发
1. 项目概述与核心价值如果你和我一样,在日常开发中同时使用 Cursor、Claude Code 或 Codex 这类 AI 编程工具,并且手头管理着多个项目仓库,那你一定遇到过这个痛点:每个项目里,那些精心调教好的 AI 技能(S…...

如何快速构建Python量化分析系统:5步掌握通达信数据接口
如何快速构建Python量化分析系统:5步掌握通达信数据接口 【免费下载链接】mootdx 通达信数据读取的一个简便使用封装 项目地址: https://gitcode.com/GitHub_Trending/mo/mootdx MOOTDX是一个基于Python的高效通达信数据接口封装,专为量化投资和数…...
)
Xilinx VCU方案深度体验:除了低延时,开发者还需要面对这些挑战(GStreamer/FPGA/稳定性)
Xilinx VCU方案实战解析:低延时光环下的工程化挑战 在专业视频处理领域,低延时编解码一直是皇冠上的明珠。Xilinx Zynq UltraScale MPSoC凭借其VCU硬核确实交出了一份漂亮的参数答卷——4K60帧H.265编解码仅2帧延时的成绩单。但当我们真正将其引入工业视…...

直播人力成本居高不下?2026十大AI数字人直播平台推荐实现长效运营
引文: 2026年,直播电商的竞争早已从“拼人设”转向了“拼夜间值守效率”。据公开数据显示,AI数字人核心市场规模预计在2026年逼近千亿大关,其中“降本”和“长效运营”是众多商家投身高频无人直播的核心诉求。事实上,…...