OpenCV相机标定与3D重建(11)机器人世界手眼标定函数calibrateRobotWorldHandEye()的使用
- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
算法描述
计算机器人世界/手眼标定: w T b _{}^{w}\textrm{T}_b wTb 和 c T g _{}^{c}\textrm{T}_g cTg。
cv::calibrateRobotWorldHandEye 是 OpenCV 中用于机器人世界手眼标定的函数。该函数通过已知的世界坐标系(world)、相机坐标系(cam)、基座坐标系(base)和平板坐标系(gripper)的姿态来计算基座相对于世界的姿态以及末端执行器相对于相机的姿态。
函数原型
void cv::calibrateRobotWorldHandEye
(InputArrayOfArrays R_world2cam,InputArrayOfArrays t_world2cam,InputArrayOfArrays R_base2gripper,InputArrayOfArrays t_base2gripper,OutputArray R_base2world,OutputArray t_base2world,OutputArray R_gripper2cam,OutputArray t_gripper2cam,RobotWorldHandEyeCalibrationMethod method = CALIB_ROBOT_WORLD_HAND_EYE_SHAH
)
参数
- 参数R_world2cam: 从世界坐标系(world)到相机坐标系(camera)的齐次矩阵中提取的旋转部分 (cTw)。这是一个包含所有从世界坐标系到相机坐标系变换的旋转矩阵 (3x3) 或旋转向量 (3x1) 的向量 (vector)。
- 参数t_world2cam: 从世界坐标系(world)到相机坐标系(camera)的齐次矩阵中提取的平移部分 (cTw)。这是一个包含所有从世界坐标系到相机坐标系变换的平移向量 (3x1) 的向量 (vector)。
- 参数R_base2gripper: 从机器人基座坐标系(base)到末端执行器坐标系(gripper)的齐次矩阵中提取的旋转部分 (gTb)。这是一个包含所有从机器人基座坐标系到末端执行器坐标系变换的旋转矩阵 (3x3) 或旋转向量 (3x1) 的向量 (vector)。
- 参数t_base2gripper: 从机器人基座坐标系(base)到末端执行器坐标系(gripper)的齐次矩阵中提取的平移部分 (gTb)。这是一个包含所有从机器人基座坐标系到末端执行器坐标系变换的平移向量 (3x1) 的向量 (vector)。
- 参数R_base2world: 估计的从机器人基座坐标系(base)到世界坐标系(world)的齐次矩阵中提取的旋转部分 (wTb),即 (3x3) 旋转矩阵。
- 参数t_base2world: 估计的从机器人基座坐标系(base)到世界坐标系(world)的齐次矩阵中提取的平移部分 (wTb),即 (3x1) 平移向量。
- 参数R_gripper2cam: 估计的从末端执行器坐标系(gripper)到相机坐标系(camera)的齐次矩阵中提取的旋转部分 (cTg),即 (3x3) 旋转矩阵。
- 参数t_gripper2cam: 估计的从末端执行器坐标系(gripper)到相机坐标系(camera)的齐次矩阵中提取的平移部分 (cTg),即 (3x1) 平移向量。
- 参数method: 实现的机器人世界/手眼标定方法之一,参见 cv::RobotWorldHandEyeCalibrationMethod。
代码示例
#include <iostream>
#include <opencv2/opencv.hpp>
#include <vector>using namespace cv;
using namespace std;int main()
{// 假设我们有四组数据,分别对应不同的抓取位置int num_poses = 4;// 从 world 到 cam 的旋转矩阵和位移向量vector< Mat > R_world2cam( num_poses );vector< Mat > t_world2cam( num_poses );// 从 base 到 gripper 的旋转矩阵和位移向量vector< Mat > R_base2gripper( num_poses );vector< Mat > t_base2gripper( num_poses );// 初始化示例数据R_world2cam[ 0 ] = ( Mat_< double >( 3, 3 ) << 1, 0, 0, 0, 1, 0, 0, 0, 1 );t_world2cam[ 0 ] = ( Mat_< double >( 3, 1 ) << 0.1, 0.2, 0.3 );R_world2cam[ 1 ] = ( Mat_< double >( 3, 3 ) << 0, -1, 0, 1, 0, 0, 0, 0, 1 );t_world2cam[ 1 ] = ( Mat_< double >( 3, 1 ) << 0.4, 0.5, 0.6 );R_world2cam[ 2 ] = ( Mat_< double >( 3, 3 ) << 0, 0, -1, 0, 1, 0, 1, 0, 0 );t_world2cam[ 2 ] = ( Mat_< double >( 3, 1 ) << 0.7, 0.8, 0.9 );R_world2cam[ 3 ] = ( Mat_< double >( 3, 3 ) << 0, 0, 1, 0, 1, 0, -1, 0, 0 );t_world2cam[ 3 ] = ( Mat_< double >( 3, 1 ) << 1.0, 1.1, 1.2 );R_base2gripper[ 0 ] = ( Mat_< double >( 3, 3 ) << 1, 0, 0, 0, 1, 0, 0, 0, 1 );t_base2gripper[ 0 ] = ( Mat_< double >( 3, 1 ) << 0.3, 0.4, 0.5 );R_base2gripper[ 1 ] = ( Mat_< double >( 3, 3 ) << 0, -1, 0, 1, 0, 0, 0, 0, 1 );t_base2gripper[ 1 ] = ( Mat_< double >( 3, 1 ) << 0.6, 0.7, 0.8 );R_base2gripper[ 2 ] = ( Mat_< double >( 3, 3 ) << 0, 0, -1, 0, 1, 0, 1, 0, 0 );t_base2gripper[ 2 ] = ( Mat_< double >( 3, 1 ) << 0.9, 1.0, 1.1 );R_base2gripper[ 3 ] = ( Mat_< double >( 3, 3 ) << 0, 0, 1, 0, 1, 0, -1, 0, 0 );t_base2gripper[ 3 ] = ( Mat_< double >( 3, 1 ) << 1.2, 1.3, 1.4 );// 输出变量Mat R_base2world, t_base2world;Mat R_gripper2cam, t_gripper2cam;// 执行机器人世界手眼标定calibrateRobotWorldHandEye( R_world2cam, t_world2cam, R_base2gripper, t_base2gripper, R_base2world, t_base2world, R_gripper2cam, t_gripper2cam, CALIB_ROBOT_WORLD_HAND_EYE_SHAH );// 输出结果cout << "Rotation matrix from base to world:\n" << R_base2world << endl;cout << "Translation vector from base to world:\n" << t_base2world << endl;cout << "Rotation matrix from gripper to camera:\n" << R_gripper2cam << endl;cout << "Translation vector from gripper to camera:\n" << t_gripper2cam << endl;return 0;
}运行结果
Rotation matrix from base to world:
[1, 0, 0;0, 1, 0;0, 0, 1]
Translation vector from base to world:
[4.163336342344337e-17;9.71445146547012e-17;1.387778780781446e-17]
Rotation matrix from gripper to camera:
[1, 0, 0;0, 1, 0;0, 0, 1]
Translation vector from gripper to camera:
[-0.2;-0.1999999999999999;-0.2000000000000001]
相关文章:
机器人世界手眼标定函数calibrateRobotWorldHandEye()的使用)
OpenCV相机标定与3D重建(11)机器人世界手眼标定函数calibrateRobotWorldHandEye()的使用
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 计算机器人世界/手眼标定: w T b _{}^{w}\textrm{T}_b wTb 和 c T g _{}^{c}\textrm{T}_g cTg。 cv::calibrateRobotWorldHa…...

计算机网络ENSP课设--三层架构企业网络
本课程设计搭建一个小型互联网,并模拟Internet的典型Web服务过程。通过此次课程设计,可以进一步理解Internet的工作原理和协议过程,并提高综合知识的运用能力和分析能力。具体目标包括: (1)掌握网络拓扑的…...

【openwrt】openwrt-21.02 基于IP地址使用ipset实现策略路由操作说明
openwrt版本信息 DISTRIB_ID=OpenWrt DISTRIB_RELEASE=21.02-SNAPSHOT DISTRIB_REVISION=r0-6bf6af1d5 DISTRIB_TARGET=mediatek/mt7981 DISTRIB_ARCH=aarch64_cortex-a53 DISTRIB_DESCRIPTION=OpenWrt 21.02-SNAPSHOT r0-6bf6af1d5 DISTRIB_TAINTS=no-all busybox override …...

Git:常用命令
一、查看当前分支 git branch 二、查看所有分支 git branch -a 三、切换到远程分支 git checkout origin/分支名 示例:git checkout origin/dev 四、拉取远程分支代码 git pull origin 分支名 示例:git pull origin dev 五、常用指令 查看暂存区…...
【2025最新版】搭建个人博客教程
【2025最新版】搭建个人博客教程 –小记: 在搭建我的这个博客之前我在CSDN也发布过一些文章,目前应该也是几千粉丝了,但是看到别人都是用自己博客写的就感觉自己很LOW,所以就想自己来搭建一个属于自己的个人博客。当然搭建博客的…...

微信小程序实现联动删除输入验证码框
以下是json代码 {"component": true,"usingComponents": {} }以下是wxml代码 <van-popup show"{{ show }}" bind:close"onClose" custom-class"extract"><image src"../../images/extract/icon1.png"…...

数据库中decimal、float 和 double区别
在计算机科学中,decimal、float 和 double 是用于表示和处理数值的不同数据类型。 - decimal 是一种精确的十进制浮点数表示,通常用于需要高精度计算的场景,比如财务应用。它能够精确表示小数,并且不会出现浮点数运算误差。 - flo…...

网络编程01
1. 概念 通过网络,让两个主机之间能够进行通信,基于这样的通信完成一定的功能 只要满足进程不同即可,即使是同一个主机,只要是不同的进程,基于网络完成编程 进行网络编程时,需要操作系统提供一组API&…...

el-dialog修改其样式不生效加deep也没用
场景 el-dialog标签直接写在了template下。 解决方法 在template中先写一层div,包裹住el-dialog。...

三天精通一算法之快速排序
力扣链接912. 排序数组 - 力扣(LeetCode)注意这题快排不能用递归,否则堆会爆 快速排序(Quicksort)是一种高效的排序算法,通常使用分治法来将一个列表分成较小的子列表,然后递归地排序这些子列表…...

互联网、物联网的相关标准
互联网的相关标准 网络通信协议: HTTP(Hypertext Transfer Protocol):用于在网络中传输文本、图像、音频和视频等数据的协议。它基于请求-响应模型,客户端发送请求给服务器,服务器返回响应。HTTPS&a…...

Linux题库及答案
填空题 1. 建立用户账号的命令是__useradd________。 2. 修改账号密码的命令是__passwd________。 3. 更改用户密码过期信息的命令是__chage________。 4. 创建一个新组的命令是___groupadd_______。 5. 用于在不注销的情况下切换到系统中的另一个用户的命令是___su_…...

Android 镜像模式和扩展模式区别探讨-Android14
Android 镜像模式和扩展模式区别探讨 1、区分镜像模式和扩展模式1.1 扩展屏是否有显示内容1.2 镜像模式显示条件 2、镜像模式界面 同屏显示和异屏显示探讨DisplayManagerService启动及主屏添加-Android13 Android主副屏显示-Android14 1、区分镜像模式和扩展模式 LogicalDispla…...

深度学习笔记之BERT(五)TinyBERT
深度学习笔记之TinyBERT 引言回顾:DistilBERT模型TinyBERT模型结构TinyBERT模型策略Transformer层蒸馏嵌入层蒸馏预测层蒸馏 TinyBERT模型的训练效果展示 引言 上一节介绍了 DistilBERT \text{DistilBERT} DistilBERT模型,本节将继续介绍优化性更强的知…...

【时间序列预测】基于PyTorch实现CNN_BiLSTM算法
文章目录 1. CNN与BiLSTM2. 完整代码实现3. 代码结构解读3.1 CNN Layer3.2 BiLSTM Layer3.3 Output Layer3.4 forward Layer 4. 应用场景5. 总结 本文将详细介绍如何使用Pytorch实现一个结合卷积神经网络(CNN)和双向长短期记忆网络(BiLSTM&am…...

联想Y7000 2024版本笔记本 RTX4060安装ubuntu22.04双系统及深度学习环境配置
目录 1..制作启动盘 2.Windows 磁盘分区,删除原来ubuntu的启动项 3.四个设置 4.安装ubuntu 5.ubuntu系统配置 1..制作启动盘 先下载镜像文件,注意版本对应。Rufus - 轻松创建 USB 启动盘 用rufus制作时,需要注意选择正确的分区类型和系统类型。不然安装的系统会有问题…...
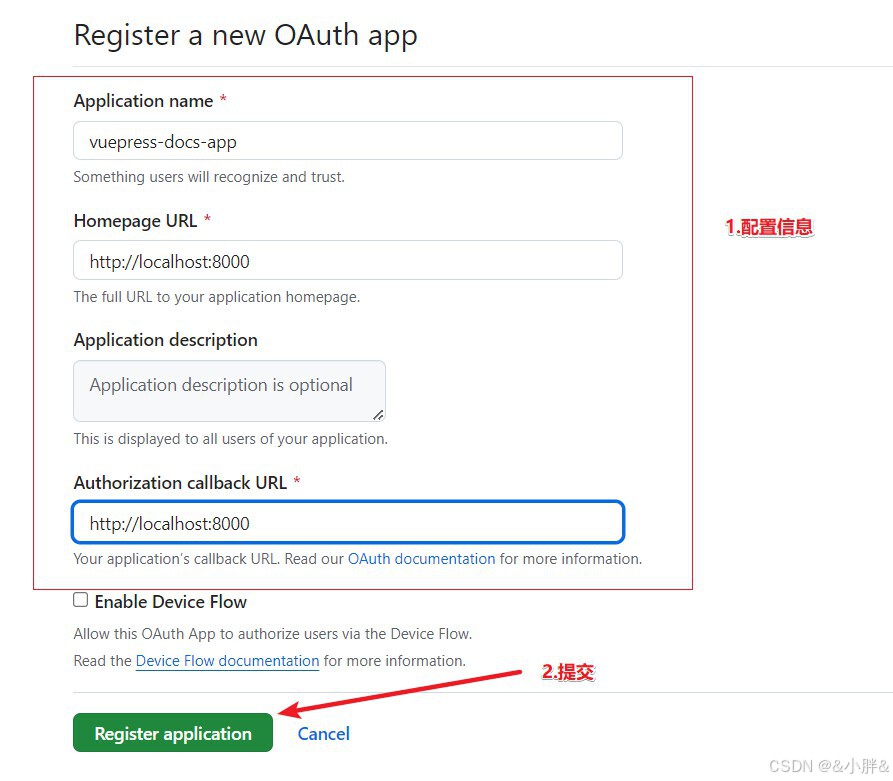
VuePress学习
1.介绍 VuePress 由两部分组成:第一部分是一个极简静态网站生成器 (opens new window),它包含由 Vue 驱动的主题系统和插件 API,另一个部分是为书写技术文档而优化的默认主题,它的诞生初衷是为了支持 Vue 及其子项目的文档需求。…...

一次“okhttp访问间隔60秒,提示unexpected end of stream“的问题排查过程
一、现象 okhttp调用某个服务,如果第二次访问间隔上一次访问时间超过60s,返回错误:"unexpected end of stream"。 二、最终定位原因: 空闲连接如果超过60秒,服务端会主动关闭连接。此时客户端恰巧访问了这…...

SQL最佳实践:避免使用COUNT=0
如果你遇到类似下面的 SQL 查询: SELECT * FROM customer c WHERE 0 (SELECT COUNT(*)FROM orders oWHERE o.customer_id c.customer_id);意味着有人没有遵循 SQL 最佳实践。该语句的作用是查找没有下过订单的客户,其中子查询使用了 COUNT 函数统计客…...

PG与ORACLE的差距
首先必须是XID 64,一个在极端环境下会FREEZE的数据库无论如何都无法承担关键业务系统的重任的,我们可以通过各种配置,提升硬件的性能,通过各种IT管控措施来尽可能避免在核心系统上面临FREEZE的风险,不过并不是每个企业…...

别再手动调阈值了!OpenCV实战:用Otsu和自适应阈值搞定光照不均的图片分割
智能图像分割实战:Otsu与自适应阈值技术解决光照不均难题 在工业质检、医疗影像分析、自动驾驶等场景中,图像分割的准确性直接影响最终结果。但现实世界的光照条件往往复杂多变——同一张图片可能同时存在过曝和欠曝区域,传统全局阈值方法在…...

ElevenLabs Enterprise方案深度拆解:从API限流策略到GDPR语音数据主权管理的7层安全加固实践
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs Enterprise方案全景概览 ElevenLabs Enterprise 是面向中大型组织构建的语音合成与语音识别一体化平台,专为高并发、多租户、合规性敏感场景设计。其核心能力覆盖实时TTS流式输出…...

移动时代数据自主:从云端依赖到物理存储的范式转变
1. 个人通信的现状与核心矛盾我们正处在一个数据爆炸的时代。每天,从清晨被手机闹钟唤醒,到深夜刷完最后一条短视频,我们每个人都在无意识地产生、消费和交换着海量数据。文章里提到一个让我印象深刻的数字:平均每人每天要处理35G…...
)
告别头像上传模糊!用Cropper.js打造完美头像裁剪上传功能(附完整前后端代码)
从零构建高精度头像裁剪系统:Cropper.js全栈实战指南 每次上传头像时,你是否遇到过这样的尴尬——精心选择的图片上传后变得模糊不清,或者被强制拉伸变形?这种糟糕的用户体验在社交平台、企业系统中尤为常见。本文将带你从零构建…...

如何在5分钟内将你的普通鼠标变成macOS生产力神器
如何在5分钟内将你的普通鼠标变成macOS生产力神器 【免费下载链接】mac-mouse-fix Mac Mouse Fix - Make Your $10 Mouse Better Than an Apple Trackpad! 项目地址: https://gitcode.com/GitHub_Trending/ma/mac-mouse-fix 还在为macOS上鼠标滚轮生硬、侧键闲置而烦恼吗…...

终极Mac菜单栏整理指南:用Ice让你的桌面从此清爽高效
终极Mac菜单栏整理指南:用Ice让你的桌面从此清爽高效 【免费下载链接】Ice Powerful menu bar manager for macOS 项目地址: https://gitcode.com/GitHub_Trending/ice/Ice 你是否厌倦了Mac菜单栏上密密麻麻的图标?是否经常因为找不到需要的应用图…...

BurstGPT:大语言模型驱动高性能计算,实现自然语言科学仿真
1. 项目概述:当大语言模型遇上高性能计算最近在AI和HPC(高性能计算)的交叉领域,一个名为BurstGPT的项目引起了我的注意。乍一看这个标题,你可能会觉得有点“缝合怪”的味道——Burst通常指代计算资源的突发式使用或高性…...

AI工具搭建自动化视频生成Quick Sync
# Quick Sync:AI驱动的自动化视频生成技术实战解析 前阵子团队接了个批量短视频生成的项目,要在短时间内产出数百条产品演示视频。一开始想着一个个用Premiere剪,但算算时间,光是渲染就够呛。后来试用了几种自动化方案,…...

Obsidian-Templates:卡片盒笔记法的终极模板库,构建你的第二大脑
Obsidian-Templates:卡片盒笔记法的终极模板库,构建你的第二大脑 【免费下载链接】Obsidian-Templates A repository containing templates and scripts for #Obsidian to support the #Zettelkasten method for note-taking. 项目地址: https://gitco…...

Python 爬虫高级实战:异地多机房爬虫协同采集
前言 随着爬虫业务规模扩张,单机、单机房部署模式逐渐暴露出单点故障、IP 池单一、地域访问延迟高、目标站点区域风控封禁、单机房带宽资源瓶颈等一系列问题。单一机房所有爬虫出口 IP 归属同一运营商、同一地域,极易被目标站点基于地域、IP 段整体封禁…...