ROS2机器人编程简述humble-第四章-BASIC DETECTOR .3
书中程序适用于turtlebot、husky等多种机器人,配置相似都可以用的。
支持ROS2版本foxy、humble。
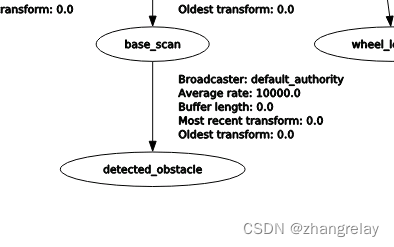
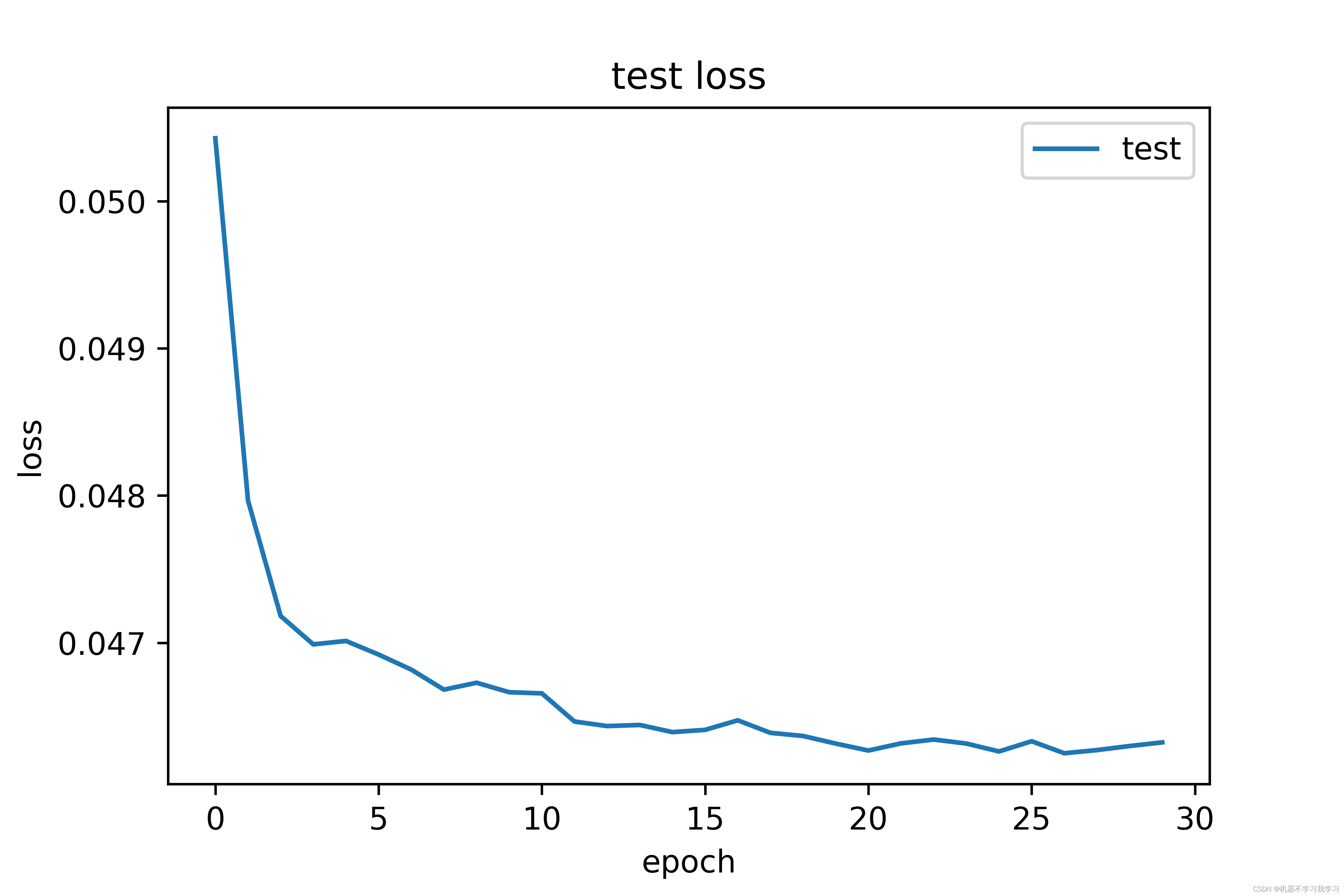
基础检测效果如下:

由于缺¥,所有设备都非常老旧,都是其他实验室淘汰或者拼凑出来的设备。机器人控制笔记本是2010年版本。

但是依然可以跑ROS1、ROS2。
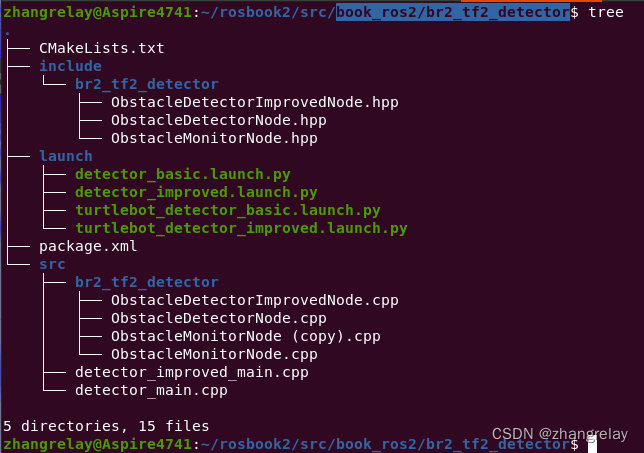
book_ros2/br2_tf2_detector目录:
.
├── CMakeLists.txt
├── include
│ └── br2_tf2_detector
│ ├── ObstacleDetectorImprovedNode.hpp
│ ├── ObstacleDetectorNode.hpp
│ └── ObstacleMonitorNode.hpp
├── launch
│ ├── detector_basic.launch.py
│ ├── detector_improved.launch.py
│ ├── turtlebot_detector_basic.launch.py
│ └── turtlebot_detector_improved.launch.py
├── package.xml
└── src├── br2_tf2_detector│ ├── ObstacleDetectorImprovedNode.cpp│ ├── ObstacleDetectorNode.cpp│ ├── ObstacleMonitorNode (copy).cpp│ └── ObstacleMonitorNode.cpp├── detector_improved_main.cpp└── detector_main.cpp5 directories, 15 files
里面有两个部分basic和improved。
CMakelist(lib):
cmake_minimum_required(VERSION 3.5)
project(br2_tf2_detector)set(CMAKE_CXX_STANDARD 17)# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tf2_ros REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(visualization_msgs REQUIRED)set(dependenciesrclcpptf2_rosgeometry_msgssensor_msgsvisualization_msgs
)include_directories(include)add_library(${PROJECT_NAME} SHAREDsrc/br2_tf2_detector/ObstacleDetectorNode.cppsrc/br2_tf2_detector/ObstacleMonitorNode.cppsrc/br2_tf2_detector/ObstacleDetectorImprovedNode.cpp
)
ament_target_dependencies(${PROJECT_NAME} ${dependencies})add_executable(detector src/detector_main.cpp)
ament_target_dependencies(detector ${dependencies})
target_link_libraries(detector ${PROJECT_NAME})add_executable(detector_improved src/detector_improved_main.cpp)
ament_target_dependencies(detector_improved ${dependencies})
target_link_libraries(detector_improved ${PROJECT_NAME})install(TARGETS${PROJECT_NAME}detectordetector_improvedARCHIVE DESTINATION libLIBRARY DESTINATION libRUNTIME DESTINATION lib/${PROJECT_NAME}
)install(DIRECTORY launch DESTINATION share/${PROJECT_NAME})if(BUILD_TESTING)find_package(ament_lint_auto REQUIRED)ament_lint_auto_find_test_dependencies()
endif()ament_package()障碍物识别节点
// Copyright 2021 Intelligent Robotics Lab
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.#include <memory>#include "br2_tf2_detector/ObstacleDetectorNode.hpp"#include "sensor_msgs/msg/laser_scan.hpp"
#include "geometry_msgs/msg/transform_stamped.hpp"#include "rclcpp/rclcpp.hpp"namespace br2_tf2_detector
{using std::placeholders::_1;ObstacleDetectorNode::ObstacleDetectorNode()
: Node("obstacle_detector")
{scan_sub_ = create_subscription<sensor_msgs::msg::LaserScan>("input_scan", rclcpp::SensorDataQoS(),std::bind(&ObstacleDetectorNode::scan_callback, this, _1));tf_broadcaster_ = std::make_shared<tf2_ros::StaticTransformBroadcaster>(*this);
}void
ObstacleDetectorNode::scan_callback(sensor_msgs::msg::LaserScan::UniquePtr msg)
{double dist = msg->ranges[msg->ranges.size() / 2];if (!std::isinf(dist)) {geometry_msgs::msg::TransformStamped detection_tf;detection_tf.header = msg->header;detection_tf.child_frame_id = "detected_obstacle";detection_tf.transform.translation.x = msg->ranges[msg->ranges.size() / 2];tf_broadcaster_->sendTransform(detection_tf);}
}} // namespace br2_tf2_detector主要就是回调函数完成大部分功能。具体参考源代码即可。
障碍物监控节点:
// Copyright 2021 Intelligent Robotics Lab
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.#include <tf2/transform_datatypes.h>
#include <tf2/LinearMath/Quaternion.h>
#include <tf2_geometry_msgs/tf2_geometry_msgs.h>#include <memory>#include "br2_tf2_detector/ObstacleMonitorNode.hpp"#include "geometry_msgs/msg/transform_stamped.hpp"#include "rclcpp/rclcpp.hpp"namespace br2_tf2_detector
{using namespace std::chrono_literals;ObstacleMonitorNode::ObstacleMonitorNode()
: Node("obstacle_monitor"),tf_buffer_(),tf_listener_(tf_buffer_)
{marker_pub_ = create_publisher<visualization_msgs::msg::Marker>("obstacle_marker", 1);timer_ = create_wall_timer(500ms, std::bind(&ObstacleMonitorNode::control_cycle, this));
}void
ObstacleMonitorNode::control_cycle()
{geometry_msgs::msg::TransformStamped robot2obstacle;try {robot2obstacle = tf_buffer_.lookupTransform("odom", "detected_obstacle", tf2::TimePointZero);} catch (tf2::TransformException & ex) {RCLCPP_WARN(get_logger(), "Obstacle transform not found: %s", ex.what());return;}double x = robot2obstacle.transform.translation.x;double y = robot2obstacle.transform.translation.y;double z = robot2obstacle.transform.translation.z;double theta = atan2(y, x);RCLCPP_INFO(get_logger(), "Obstacle detected at (%lf m, %lf m, , %lf m) = %lf rads",x, y, z, theta);visualization_msgs::msg::Marker obstacle_arrow;obstacle_arrow.header.frame_id = "odom";obstacle_arrow.header.stamp = now();obstacle_arrow.type = visualization_msgs::msg::Marker::ARROW;obstacle_arrow.action = visualization_msgs::msg::Marker::ADD;obstacle_arrow.lifetime = rclcpp::Duration(1s);geometry_msgs::msg::Point start;start.x = 0.0;start.y = 0.0;start.z = 0.0;geometry_msgs::msg::Point end;end.x = x;end.y = y;end.z = z;obstacle_arrow.points = {start, end};obstacle_arrow.color.r = 1.0;obstacle_arrow.color.g = 0.0;obstacle_arrow.color.b = 0.0;obstacle_arrow.color.a = 1.0;obstacle_arrow.scale.x = 0.02;obstacle_arrow.scale.y = 0.1;obstacle_arrow.scale.z = 0.1;marker_pub_->publish(obstacle_arrow);
}} // namespace br2_tf2_detector代码和原始版本稍微有些不同。
重要部分:
try {robot2obstacle = tf_buffer_.lookupTransform("odom", "detected_obstacle", tf2::TimePointZero);} catch (tf2::TransformException & ex) {RCLCPP_WARN(get_logger(), "Obstacle transform not found: %s", ex.what());return;}double x = robot2obstacle.transform.translation.x;double y = robot2obstacle.transform.translation.y;double z = robot2obstacle.transform.translation.z;double theta = atan2(y, x);RCLCPP_INFO(get_logger(), "Obstacle detected at (%lf m, %lf m, , %lf m) = %lf rads",x, y, z, theta);如果tf不能正常工作,会报错Obstacle transform not found:
例如odom没有
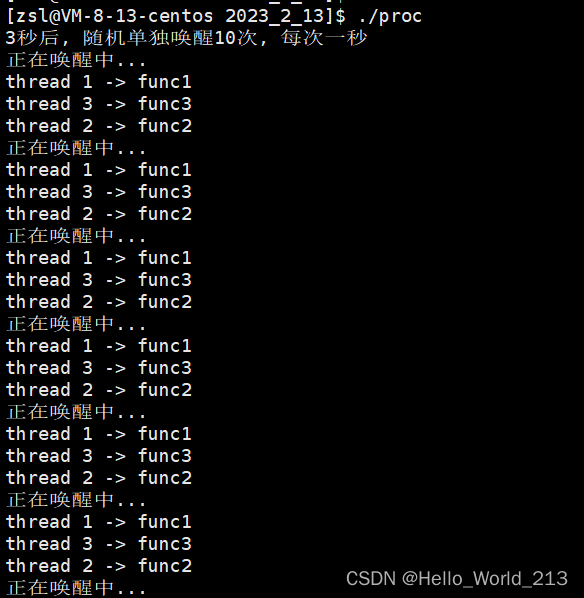
[detector-1] [WARN] [1676266943.177279939] [obstacle_monitor]: Obstacle transform not found: "odom" passed to lookupTransform argument target_frame does not exist.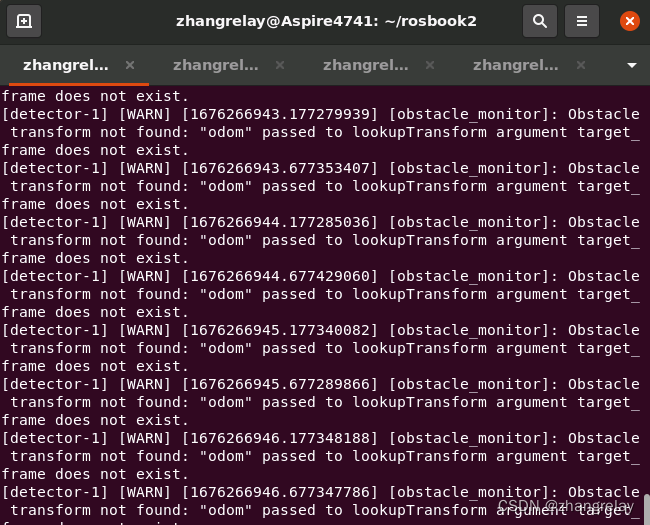
例如detected_obstacle没有
[detector-1] [WARN] [1676267019.166991316] [obstacle_monitor]: Obstacle transform not found: "detected_obstacle" passed to lookupTransform argument source_frame does not exist. 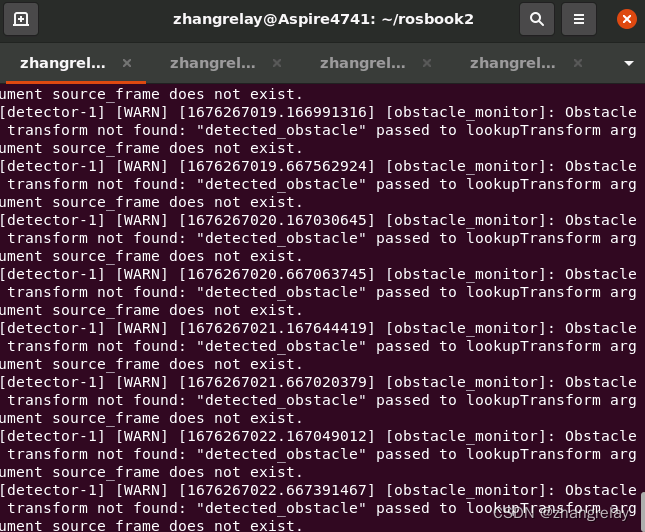
需要思考并解决问题哦^_^
如果都ok!那么"Obstacle detected at (%lf m, %lf m, , %lf m) = %lf rads":
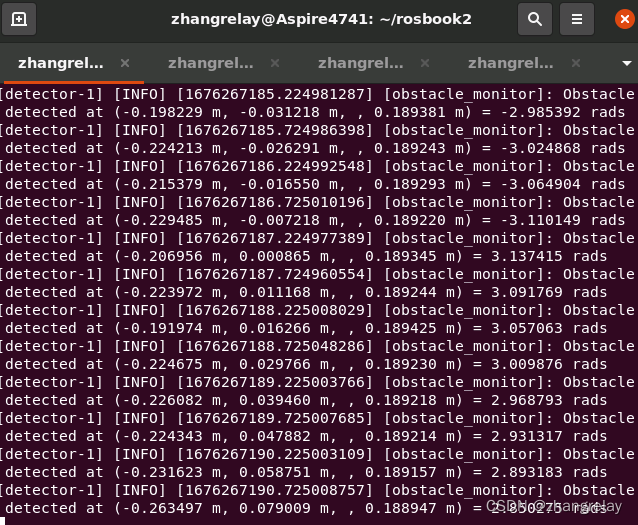
机器人在运动中所以角度和距离会不断变化。
此时如果查看:
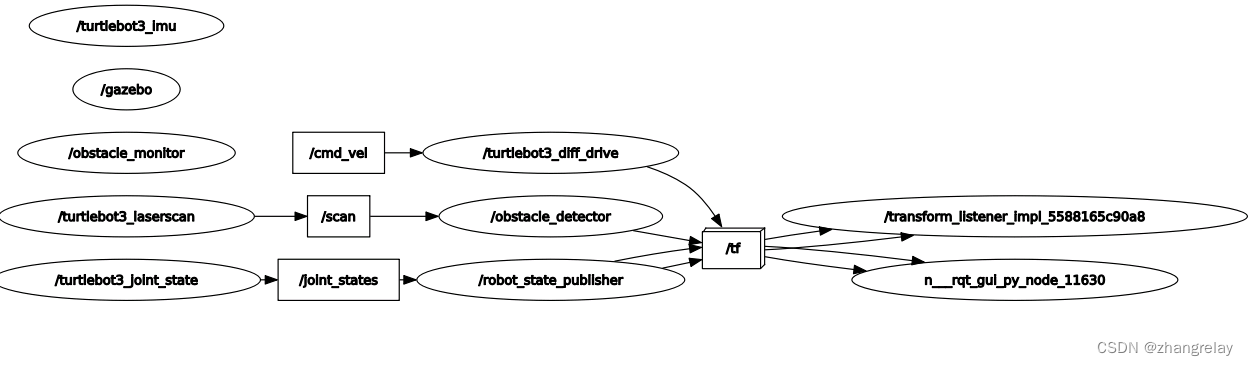
rqt

其中检测tf是由激光传感器测距给出的。
节点主题图:
这个代码主程序!
// Copyright 2021 Intelligent Robotics Lab
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.#include <memory>#include "br2_tf2_detector/ObstacleDetectorNode.hpp"
#include "br2_tf2_detector/ObstacleMonitorNode.hpp"#include "rclcpp/rclcpp.hpp"int main(int argc, char * argv[])
{rclcpp::init(argc, argv);auto obstacle_detector = std::make_shared<br2_tf2_detector::ObstacleDetectorNode>();auto obstacle_monitor = std::make_shared<br2_tf2_detector::ObstacleMonitorNode>();rclcpp::executors::SingleThreadedExecutor executor;executor.add_node(obstacle_detector->get_node_base_interface());executor.add_node(obstacle_monitor->get_node_base_interface());executor.spin();rclcpp::shutdown();return 0;
}这里需要注意!
rclcpp::executors::SingleThreadedExecutor executor;executor.add_node(obstacle_detector->get_node_base_interface());executor.add_node(obstacle_monitor->get_node_base_interface());如果C++掌握一般推荐看一看:
蓝桥ROS机器人之现代C++学习笔记7.1 并行基础
多线程是如何实现的。
整个程序要跑起来:
终端1-gazebo仿真:ros2 launch turtlebot3_gazebo empty_world.launch.py
ros2 launch turtlebot3_gazebo empty_world.launch.py
[INFO] [launch]: All log files can be found below /home/zhangrelay/.ros/log/2023-02-13-13-43-10-244500-Aspire4741-10860
[INFO] [launch]: Default logging verbosity is set to INFO
urdf_file_name : turtlebot3_burger.urdf
[INFO] [gzserver-1]: process started with pid [10862]
[INFO] [gzclient -2]: process started with pid [10864]
[INFO] [ros2-3]: process started with pid [10868]
[INFO] [robot_state_publisher-4]: process started with pid [10870]
[robot_state_publisher-4] [WARN] [1676266991.467830827] [robot_state_publisher]: No robot_description parameter, but command-line argument available. Assuming argument is name of URDF file. This backwards compatibility fallback will be removed in the future.
[robot_state_publisher-4] Parsing robot urdf xml string.
[robot_state_publisher-4] Link base_link had 5 children
[robot_state_publisher-4] Link caster_back_link had 0 children
[robot_state_publisher-4] Link imu_link had 0 children
[robot_state_publisher-4] Link base_scan had 0 children
[robot_state_publisher-4] Link wheel_left_link had 0 children
[robot_state_publisher-4] Link wheel_right_link had 0 children
[robot_state_publisher-4] [INFO] [1676266991.472337172] [robot_state_publisher]: got segment base_footprint
[robot_state_publisher-4] [INFO] [1676266991.472419811] [robot_state_publisher]: got segment base_link
[robot_state_publisher-4] [INFO] [1676266991.472444636] [robot_state_publisher]: got segment base_scan
[robot_state_publisher-4] [INFO] [1676266991.472465018] [robot_state_publisher]: got segment caster_back_link
[robot_state_publisher-4] [INFO] [1676266991.472485972] [robot_state_publisher]: got segment imu_link
[robot_state_publisher-4] [INFO] [1676266991.472505808] [robot_state_publisher]: got segment wheel_left_link
[robot_state_publisher-4] [INFO] [1676266991.472525491] [robot_state_publisher]: got segment wheel_right_link
[ros2-3] Set parameter successful
[INFO] [ros2-3]: process has finished cleanly [pid 10868]
[gzserver-1] [INFO] [1676266994.292818234] [turtlebot3_imu]: <initial_orientation_as_reference> is unset, using default value of false to comply with REP 145 (world as orientation reference)
[gzserver-1] [INFO] [1676266994.417396256] [turtlebot3_diff_drive]: Wheel pair 1 separation set to [0.160000m]
[gzserver-1] [INFO] [1676266994.417528534] [turtlebot3_diff_drive]: Wheel pair 1 diameter set to [0.066000m]
[gzserver-1] [INFO] [1676266994.420616206] [turtlebot3_diff_drive]: Subscribed to [/cmd_vel]
[gzserver-1] [INFO] [1676266994.425994254] [turtlebot3_diff_drive]: Advertise odometry on [/odom]
[gzserver-1] [INFO] [1676266994.428920116] [turtlebot3_diff_drive]: Publishing odom transforms between [odom] and [base_footprint]
[gzserver-1] [INFO] [1676266994.460852885] [turtlebot3_joint_state]: Going to publish joint [wheel_left_joint]
[gzserver-1] [INFO] [1676266994.461009035] [turtlebot3_joint_state]: Going to publish joint [wheel_right_joint]终端2-障碍物检测:
ros2 launch br2_tf2_detector turtlebot_detector_basic.launch.py
终端3-rqt:rqt
终端4-rviz2:rviz2
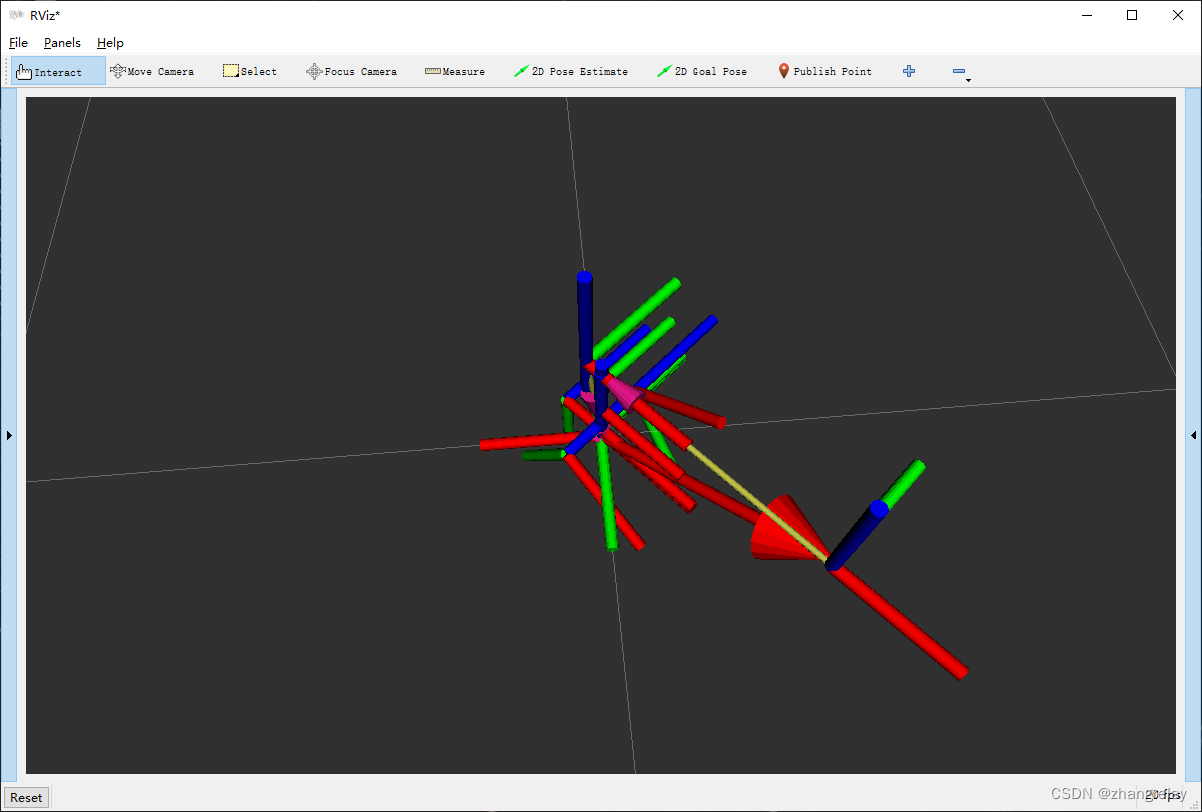
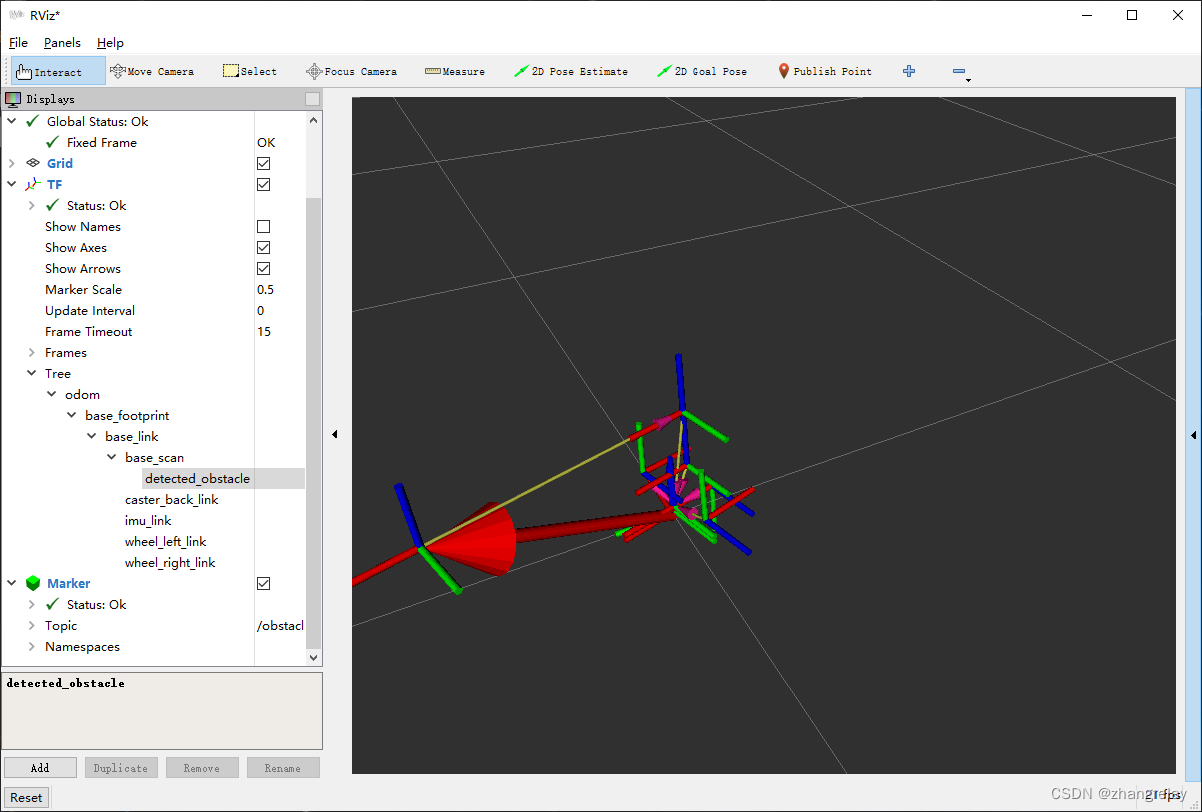
windows端也可以获取信息。
补充:
四元数是方向的4元组表示,它比旋转矩阵更简洁。四元数对于分析涉及三维旋转的情况非常有效。四元数广泛应用于机器人、量子力学、计算机视觉和3D动画。
可以在维基百科上了解更多关于基础数学概念的信息。还可以观看一个可探索的视频系列,将3blue1brown制作的四元数可视化。
官方教程将指导完成调试典型tf2问题的步骤。它还将使用许多tf2调试工具,如tf2_echo、tf2_monitor和view_frames。
TF2完整教程提纲:
tf2
许多tf2教程都适用于C++和Python。这些教程经过简化,可以完成C++曲目或Python曲目。如果想同时学习C++和Python,应该学习一次C++教程和一次Python教程。
目录
工作区设置
学习tf2
调试tf2
将传感器消息与tf2一起使用
工作区设置
如果尚未创建完成教程的工作空间,请遵循本教程。
学习tf2
tf2简介。
本教程将让了解tf2可以为您做什么。它在一个多机器人的例子中展示了一些tf2的力量,该例子使用了turtlesim。这还介绍了使用tf2_echo、view_frames和rviz。
编写静态广播(Python)(C++)。
本教程教如何向tf2广播静态坐标帧。
编写广播(Python)(C++)。
本教程教如何向tf2广播机器人的状态。
编写监听器(Python)(C++)。
本教程教如何使用tf2访问帧变换。
添加框架(Python)(C++)。
本教程教如何向tf2添加额外的固定帧。
使用时间(Python)(C++)。
本教程教使用lookup_transform函数中的超时来等待tf2树上的转换可用。
时间旅行(Python)(C++)。
本教程向介绍tf2的高级时间旅行功能。
调试tf2
四元数基本原理。
本教程介绍ROS 2中四元数的基本用法。
调试tf2问题。
本教程向介绍调试tf2相关问题的系统方法。
将传感器消息与tf2一起使用
对tf2_ros::MessageFilter使用标记数据类型。
本教程教您如何使用tf2_ros::MessageFilter处理标记的数据类型。
相关文章:
ROS2机器人编程简述humble-第四章-BASIC DETECTOR .3
书中程序适用于turtlebot、husky等多种机器人,配置相似都可以用的。支持ROS2版本foxy、humble。基础检测效果如下:由于缺¥,所有设备都非常老旧,都是其他实验室淘汰或者拼凑出来的设备。机器人控制笔记本是2010年版本。…...
【图像分类】基于PyTorch搭建LSTM实现MNIST手写数字体识别(双向LSTM,附完整代码和数据集)
写在前面: 首先感谢兄弟们的关注和订阅,让我有创作的动力,在创作过程我会尽最大能力,保证作品的质量,如果有问题,可以私信我,让我们携手共进,共创辉煌。 在https://blog.csdn.net/A…...
【Linux】多线程编程 - 同步/条件变量/信号量
目录 一.线程同步 1.什么是线程同步 2.为什么需要线程同步 3.如何实现线程同步 二.条件变量 1.常见接口以及使用 2.wiat/signal中的第二个参数mutex的意义 3.代码验证 三.POSIX信号量 1.概念 2.常见接口以及使用 四.条件变量vsPOSIX信号量 一.线程同步 1.什么是线…...

ES优化方案
ES优化&联合HBASE: 【Elasticsearch】优秀实践-ESHbase的实现_少加点香菜的博客-CSDN博客_sceshbase ES写入性能优化方案 ElasticSearch 调优笔记_index.refresh_interval_六月飞雪的博客-CSDN博客 es如何提升写入性能_婲落ヽ紅顏誶的博客-CSDN博客_es写入性…...
从数据备份保护到完整生命周期管理平台,爱数全新发布 AnyBackup Family 8
编辑 | 宋慧 出品 | CSDN 云计算 从2003年创业,开始做数据备份技术,爱数已经走过了近20年的时间。现在,数据的价值被越来越多的业界与用户看到,数据分析应用赛道近年一直持续火热。而现在的爱数在做的,已经从数据的备…...

Go 微服务开发框架 DMicro 的设计思路
Go 微服务开发框架 DMicro 的设计思路 DMicro 源码地址: Gitee:dmicro: dmicro是一个高效、可扩展且简单易用的微服务框架。包含drpc,dserver等 背景 DMicro 诞生的背景,是因为我写了 10 来年的 PHP,想在公司内部推广 Go, 公司内部的组件及 rpc 协议都…...

浅谈功能测试
1.功能测试流程 1.1 功能测试流程 # 功能测试大致按照以下流程进行: (1).需求分析与评审(2).测试计划与测试方案(3).测试用例设计(4).测试用例评审(5).执行用例(6).缺陷跟踪及报告产出 1.2 功能测试流程详解 (1).需求分析与评审 功能测试应从需求出发, 功能测试就是尽量覆…...

UDP的详细解析
UDP的详细解析 文章目录UDP的详细解析UDP 概述UDP的首部格式检验和的计算抓包测试参考TCP/IP运输层的两个主要协议都是互联网的正式标准,即:用户数据报协议UDP (User Datagram Protocol)传输控制协议TCP (Transmission Control Protocol) 按照OSI的术语…...

史上最详细JUC教程之Synchronized与锁升级详解
在Java早期版本中,synchronized属于重量级锁,效率低下,因为监视器锁(monitor)是依赖于底层的操作系统的Mutex Lock来实现的,挂起线程和恢复线程都需要转入内核态去完成,阻塞或唤醒一个Java线程需…...

Vue|初识Vue
Vue是一款用于构建用户界面的JavaScript框架。它基于标准HTML、CSS和JavaScript构建,并提供了一套声明式的、组件化的编程模型,帮助开发者高效地开发用户界面。 初识Vue1. Vue简介2. 开发准备3. 模板语法3.1 差值语法3.2 指令语法4. 数据绑定4.1 单向数据…...
在职阿里6年,一个29岁女软件测试工程师的心声
简单的先说一下,坐标杭州,14届本科毕业,算上年前在阿里巴巴的面试,一共有面试了有6家公司(因为不想请假,因此只是每个晚上去其他公司面试,所以面试的公司比较少)其中成功的有4家&…...
(C语言)自定义类型,枚举与联合
问:1. 结构体在自引用的时候不能怎么样?可以怎么样?2. Solve the problems:自定义一个学生结构体类型,要包含姓名,性别,年龄,六科成绩,家乡(也为结构体&#…...

node.js服务端笔记文档学会写接口,学习分类:path、包、模块化、fs、express、中间件、jwt、开发模式、cors。
node.js 学习笔记 node.js服务端笔记文档学会写接口,path、包、模块化、fs、express、中间件、JWT、开发模式、cors。 gitee:代码接口笔记 1什么是node.js nodejs 是基于ChromeV8,引擎的一个javaScript 运行环境。node.js 无法使用DOM和BO…...
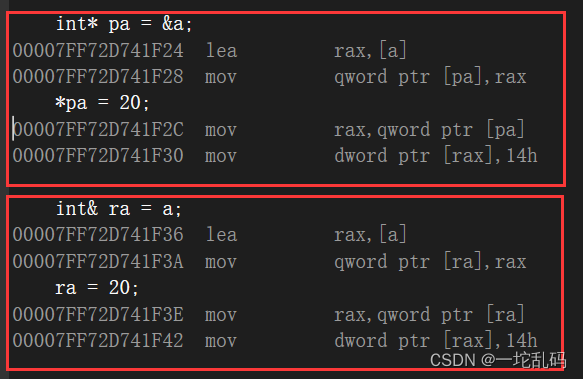
初始C++(三):引用
文章目录一.引用的概念二.引用的使用1.引用作为输出型参数2. 引用作为函数返回值3.const引用三.引用的一些小问题四.引用和指针五.引用和指针的区别一.引用的概念 引用的作用是给一个已经存在的变量取别名,编译器不会为引用变量开空间,引用变量和被他引…...

【前端】参考C站动态发红包界面,高度还原布局和交互
最近有些小伙伴咨询博主说前端布局好难,其实都是熟能生巧! 模仿C站动态发红包界面,cssdiv实现布局,纯javascript实现交互效果 目录 1、界面效果 2、界面分析 2.1、整体结构 2.2、标题 2.3、表单 2.4、按钮 3、代码实现 3.…...

VR全景带你浪漫“狂飙”情人节,见证甜蜜心动
当情人节遇上VR,足以让情侣过一个难忘的情人节。马上情人节就要到了,大家是不是还在绞尽脑汁的想着,如何和另一半过一个浪漫的情人节呢?老套的剧情已经不能吸引人了,让我们看看VR全景给情人节带来了哪些不同的体验吧&a…...
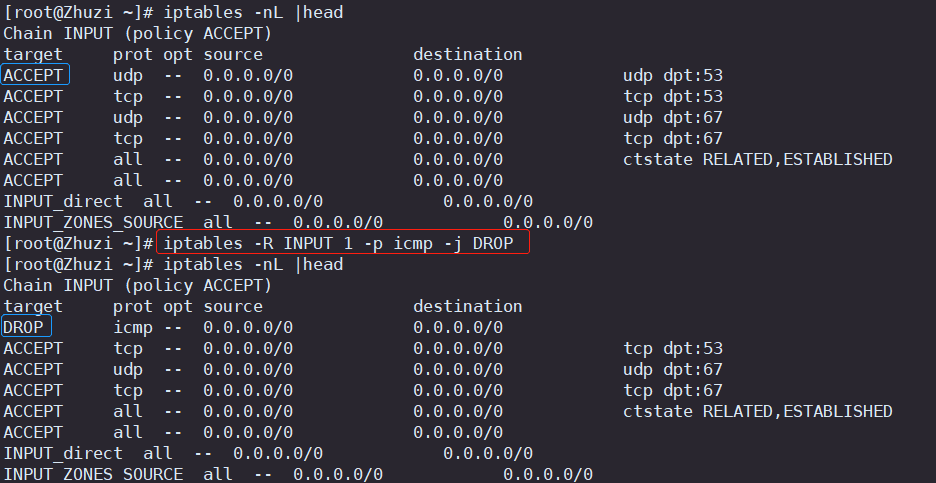
Linux系统安全之iptables防火墙
目录 一.iptables防火墙基本介绍 二.iptables的四表五链 三.iptables的配置 1.iptables的安装 2.iptables防火墙的配置方法 四.添加、查看、删除规则 1.查看(fliter)表中的所有链 iptables -L 2.使用数字形式(fliter)表所有链 查看输出结果 iptables -nL 3.清空表中所…...

【C#基础】C# 变量与常量的使用
序号系列文章1【C#基础】C# 程序通用结构2【C#基础】C# 基础语法解析3【C#基础】C# 数据类型总结文章目录前言一. 变量(variable)1,变量定义及初始化2,变量的类别3,接收输出变量二. 常量(constantÿ…...

[ 常用工具篇 ] CobaltStrike(CS神器)基础(一) -- 安装及设置监听器详解
🍬 博主介绍 👨🎓 博主介绍:大家好,我是 _PowerShell ,很高兴认识大家~ ✨主攻领域:【渗透领域】【数据通信】 【通讯安全】 【web安全】【面试分析】 🎉点赞➕评论➕收藏 养成习…...
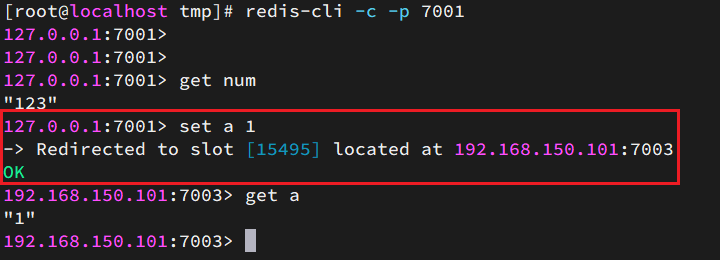
Redis集群
Redis集群 本章是基于CentOS7下的Redis集群教程,包括: 单机安装RedisRedis主从Redis分片集群 1.单机安装Redis 首先需要安装Redis所需要的依赖: yum install -y gcc tcl然后将课前资料提供的Redis安装包上传到虚拟机的任意目录ÿ…...

0基础装完龙虾不知道干嘛?用15分钟帮你激活造物主身份
这个 skill,由惊风制作,前后打磨了一个多月。 它解决的不是“怎么安装 OpenClaw”,而是一个更核心的问题:为什么很多人装完以后,Agent 依然像个空壳。一、为什么会有 king.skill?很多人第一次装完 OpenClaw…...

别再自己造轮子了!用BouncyCastle库在C#里快速搞定SM4国密加解密
用BouncyCastle在C#中高效实现SM4国密算法 金融级数据安全已成为现代企业系统的刚需,而国密算法作为我国自主研发的密码体系核心,正在政务、金融等高安全要求场景中快速普及。SM4作为国密标准中的对称加密算法,其128位分组长度和32轮非线性迭…...

PHPWord替换word模板内容时,存在表格,且不确定表格行数的处理方式
PHPWord替换word模板内容时,存在表格,且不确定表格行数的处理方式 想得到的目标表格 表格可能存在若干行,需要循环生成,插入到word模板中 word模板 实现过程 1、Composer安装 phpword composer require phpoffice/phpword2、实现代码 //模拟数据 $data = [[...

【免费下载】 新魔百和M301H-CW代工系列强刷固件:当贝桌面纯净版安卓系统
新魔百和M301H-CW代工系列强刷固件:当贝桌面纯净版安卓系统 【下载地址】16-001-T-新魔百和M301H-CW代工-Hi3798MV300-MV310通用强刷固件当贝桌面纯净版安卓系统 本资源包专为新魔百和M301H-CW代工系列设备设计,适用于Hi3798MV300和MV310芯片组的智能电视…...

从 JetBrains 全家桶用户视角,聊聊 DataGrip 那些被低估的『协同』技巧:共享查询、布局同步与团队规范
从 JetBrains 全家桶用户视角,聊聊 DataGrip 那些被低估的『协同』技巧:共享查询、布局同步与团队规范 在团队开发环境中,数据库操作往往被视为个人技能而非团队资产。当开发者频繁切换于 IntelliJ IDEA、PyCharm 和 DataGrip 之间时…...

Linux密钥文件管理排查方法
Linux密钥文件管理排查方法本文面向具备一定 Linux 基础的技术人员,围绕密钥文件管理展开,重点讨论敏感文件权限、轮换流程和审计追踪。在中级运维和系统管理工作中,这类主题常常与配置变更、资源状态、权限边界、自动化任务和业务影响交织在…...

LabVIEW虚拟仪表:数据流编程与测控应用的核心交互范式
1. 项目概述:为什么虚拟仪表是LabVIEW的灵魂如果你用过LabVIEW,或者哪怕只是看过它的界面,第一印象大概率是那些花花绿绿的旋钮、开关、仪表盘和波形图。很多人觉得这就是LabVIEW的“皮肤”,一个为了让程序看起来像真实仪器而做的…...

NotebookLM相似文档推荐不准,深度解析向量维度坍缩、跨域语义漂移与上下文窗口截断三大根源问题
更多请点击: https://intelliparadigm.com 第一章:NotebookLM相似文档推荐不准的系统性现象观察 在实际使用 NotebookLM 过程中,用户频繁反馈其“相似文档推荐”功能存在显著偏差:高语义相关但低表面重合度的文档常被遗漏&#x…...

【亲测免费】 PLC1200四路抢答器程序:打造高效公平的抢答体验
PLC1200四路抢答器程序:打造高效公平的抢答体验 【下载地址】PLC1200四路抢答器程序 本仓库提供了一个完整的S7-1200四路抢答器程序,可以直接下载并使用。该程序适用于需要进行四路抢答的场景,如竞赛、培训等。程序经过精心设计和测试&#x…...

OctoBase源码解析:深入理解Rust实现的本地优先数据库引擎 [特殊字符]
OctoBase源码解析:深入理解Rust实现的本地优先数据库引擎 🐙 【免费下载链接】OctoBase 🐙 OctoBase is the open-source database behind AFFiNE, local-first, yet collaborative. A light-weight, scalable, data engine written in Rust.…...