【Isaac Lab】Ubuntu22.04安装英伟达驱动
目录
1.1 禁用nouveau驱动
1.2 安装必要的依赖项
1.3 下载安装
1.4 查看是否安装成功
1.5 安装CUDA
1.5.1 下载
1.5.2 按照提示进行下载安装
1.5.3 添加环境变量
1.5.4 测试CUDA是否安装成功
1.1 禁用nouveau驱动
输入以下命令打开blacklist.conf文件
sudo vim /etc/modprobe.d/blacklist.conf在文本最后添加:
blacklist nouveau
options nouveau modeset=0
然后执行:
sudo update-initramfs -u重启后,执行以下命令,如果没有屏幕输出,说明禁用nouveau成功:
lsmod | grep nouveau1.2 安装必要的依赖项
sudo apt-get updatesudo apt-get install g++sudo apt-get install gccsudo apt-get install make#卸载原有驱动器sudo apt-get remove nvidia-*1.3 下载安装
识别您的 NVIDIA 显卡。以下命令将允许您识别您的 Nvidia 卡型号:
ubuntu-drivers devices使用您的网络浏览器导航到 Nvidia 官方网站并为您的 Nvidia 显卡下载适当的驱动程序。或者,如果您知道自己在做什么,则可以直接从 Nvidia Linux 驱动程序列表中下载驱动程序。准备就绪后,您最终应该得到一个类似于如下所示的文件,放在home文件夹下:
NVIDIA-Linux-x86_64-550.100.run安装先决条件编译和安装 Nvidia 驱动程序需要满足以下先决条件:
sudo apt install build-essential libglvnd-dev pkg-config安装
sudo chmod a+x NVIDIA-Linux-x86_64-550.100.runsudo ./NVIDIA-Linux-x86_64-550.100.run -no-opengl-files -no-x-check -no-nouveau-check注:只有禁用opengl这样安装才不会出现循环登陆的问题
-no-x-check:安装驱动时关闭X服务
-no-nouveau-check:安装驱动时禁用nouveau
-no-opengl-files:只安装驱动文件,不安装OpenGL文件
现在已安装 Nvidia 驱动程序。重新启动系统:
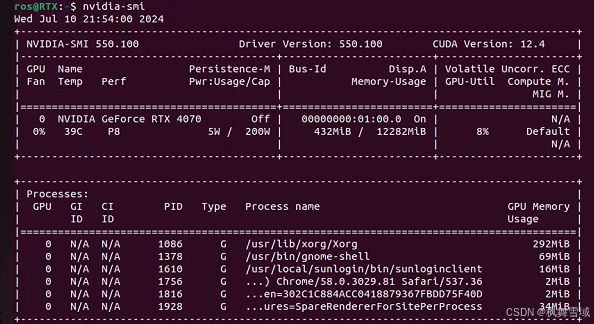
sudo reboot1.4 查看是否安装成功
nvidia-smi安装版本550.100
1.5 安装CUDA
1.5.1 下载
前往NVIDIA官网https://developer.nvidia.com/cuda-toolkit-archive,选择和NVIDIA显卡驱动版本相适应的CUDA版本,我这里选择12.4.0版本。

在跳转出来的界面选择系统信息和平台信息,我是Intel的CPU,Ubuntu22.04系统,依次选择Linux,X86_64,Ubuntu,22.04,runfile(local)。

wget https://developer.download.nvidia.com/compute/cuda/12.4.0/local_installers/cuda_12.4.0_550.54.14_linux.runsudo sh cuda_12.4.0_550.54.14_linux.run1.5.2 按照提示进行下载安装
(1)他会问你已经有了一个nvidia驱动,是否继续,点击continue.
(2)输入accept
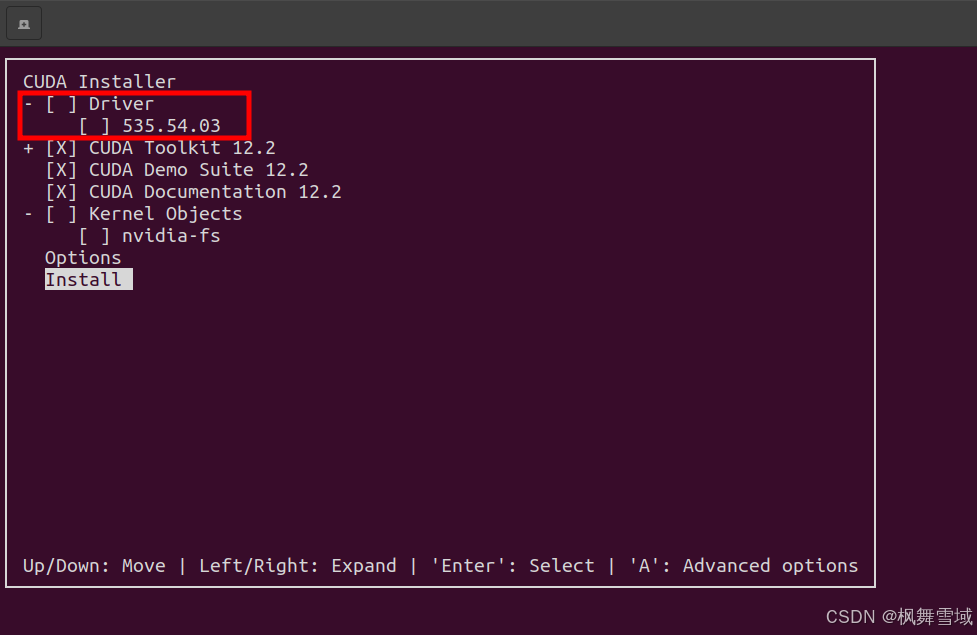
(3)进入CUDA_Installer界面,按上下箭头,选择 Driver那一项,回车取消勾选(因为我们刚才已经安装driver了,安装cuda默认会再安装一遍,这里我们就不需要了)。 重点来了!!!在这个界面,使用空格或者Enter键,取消选择Driver,即让方括号中没有X,然后移动光标到Install,使用Enter键进行安装。如果这里不取消Driver,会覆盖安装NVIDIA驱动,会导致诸如黑屏等等不确定的问题。

(4)然后移动到 install,回车继续安装。
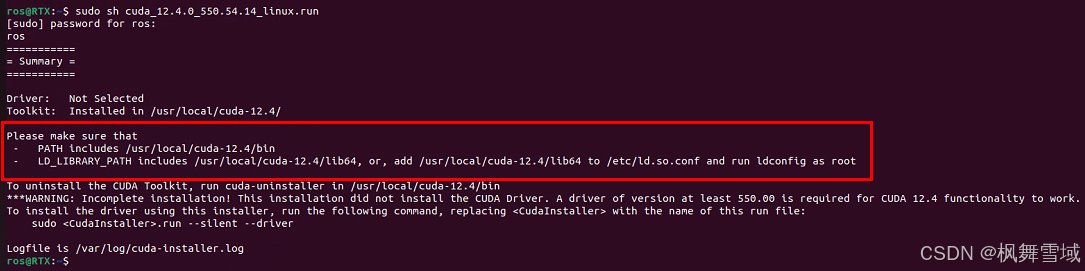
安装完成后,会有一个summary如下图,这个界面不要动,重新打开一个终端:
1.5.3 添加环境变量
根据上述提示,依次输入如下指令,添加环境变量
export PATH=/usr/local/cuda-12.4/bin${PATH:+:${PATH}}export LD_LIBRARY_PATH=/usr/local/cuda-12.4/lib64${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}添加完成后,使用如下指令刷新环境变量。
source ~/.bashrc1.5.4 测试CUDA是否安装成功
使用Ctrl+Alt+T新建终端,输入以下指令,显示CUDA版本信息,表明CUDA安装成功。
nvcc -V
相关文章:
【Isaac Lab】Ubuntu22.04安装英伟达驱动
目录 1.1 禁用nouveau驱动 1.2 安装必要的依赖项 1.3 下载安装 1.4 查看是否安装成功 1.5 安装CUDA 1.5.1 下载 1.5.2 按照提示进行下载安装 1.5.3 添加环境变量 1.5.4 测试CUDA是否安装成功 1.1 禁用nouveau驱动 输入以下命令打开blacklist.conf文件 sudo vim /etc…...
JS,递归,处理树形数据组件,模糊查询树形结构数据字段
JS递归如何模糊查询树形结构数据,根据数据中的某一个字段值,模糊匹配 直接拿去使用就行 function filterTreeLabel(arr, label) {let result []arr.forEach((item) > {// if (String(item.POBJECT_NAME).toLowerCase().indexOf(label)!-1) {if (String(item.P…...

神州数码DCME-320 online_list.php 任意文件读取漏洞复现
0x01 产品描述: 神州数码DCME-320是一款高性能多业务路由器,专为多用户、多流量和多业务种类需求设计。它采用了...

nginx的内置变量以及nginx的代理
nginx的内置变量 客户端 命令含义$uri可以获取客户端请求的地址,包含主机和查询的参数$request_uri:获取客户端的请求地址,包含主机和查询参数。$host:请求的主机名,客户端—发送请求的url地址$http_user_agent获取客户端请求的浏览器和操作…...
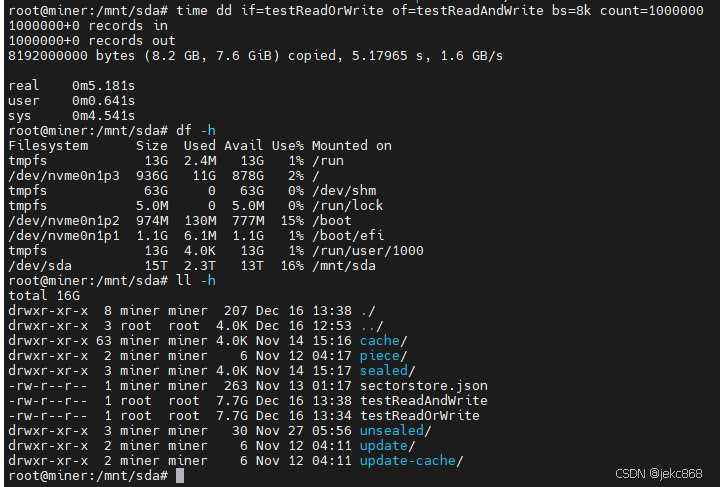
ubuntu监测硬盘状态
安装smartmontools smartctl -l error /dev/sdk smartctl -i /dev/sda lshw -class disk smartctl -H /dev/sd 结果1: 结果2:PASSED,这表示硬盘健康状态良好 smartctl -a /dev/sdb sdk lsblk blkid 测试写入速度 time dd if/dev/zero of…...

3.2.1.2 汇编版 原子操作 CAS
基本原理说明 在 x86 和 ARM 架构上,原子操作通常利用硬件提供的原子指令来实现,比如 LOCK 前缀(x86)或 LDREX/STREX(ARM)。以下是一些关键的原子操作(例如原子递增和比较交换)的汇…...

InnoDB事务系统(二):事务的实现
事务隔离性由锁来实现。原子性、一致性、持久性通过数据库的 redo log 和 undo log 来完成。 redo log 称为重做日志,用来保证事务的原子性和持久性。undo log 用来保证事务的一致性。 有的 DBA 或许会认为 undo 是 redo 的逆过程,其实不然。redo 和 u…...

xdoj :模式匹配
模式匹配 题目描述: 接收信号中包含特定的信号模式,对接收信号进行检测,以统计特定模式出现的次数。 例如接收信号为 9 3 5 7 5 8 6 3 5 7 1 9 3 5 7,如果特定信号为 3 5 7,则接收信号中包含了 3 个特定模式。通过键…...

Redis的基本使用命令(GET,SET,KEYS,EXISTS,DEL,EXPIRE,TTL,TYPE)
目录 SET GET KEYS EXISTS DEL EXPIRE TTL redis中的过期策略是怎么实现的(面试) 上文介绍reids的安装以及基本概念,本章节主要介绍 Redis的基本使用命令的使用 Redis 是一个基于键值对(KEY - VALUE)存储的…...
生产环境中遇到的问题及改进)
LruCache(本地cache)生产环境中遇到的问题及改进
问题:单机qps增加时请求摘要后端,耗时也会增加,因为超过了后端处理能力(最大qps,存在任务堆积)。 版本一 引入LruCache。为了避免数据失效,cache数据的时效性要小于摘要后端物料的更新时间&…...

智慧公交指挥中枢,数据可视化 BI 驾驶舱
随着智慧城市的蓬勃发展,公共交通作为城市运营的核心枢纽,正朝着智能化和数据驱动的方向演进。通过整合 CAN 总线技术(Controller Area Network,控制器局域网总线)、车载智能终端、大数据分析及处理等尖端技术,构建的公交“大脑”…...
【计算机网络】期末考试预习复习|上
作业讲解 物理层作业 共有4个用户进行CDMA通信。这4个用户的码片序列为: A: (–1 –1 –1 1 1 –1 1 1);B: (–1 –1 1 –1 1 1 1 –1) C: (–1 1 –1 1 1 1 –1 –1);D: (–1 1 –1 –1 –1 –1 1 –1) 现收到码片序列:(–1 1 –…...

YOLOv8目标检测(四)_图片推理
YOLOv8目标检测(一)_检测流程梳理:YOLOv8目标检测(一)_检测流程梳理_yolo检测流程-CSDN博客 YOLOv8目标检测(二)_准备数据集:YOLOv8目标检测(二)_准备数据集_yolov8 数据集准备-CSDN博客 YOLOv8目标检测(三)_训练模型:YOLOv8目标检测(三)_训…...

AI工具如何深刻改变我们的工作与生活
在当今这个科技日新月异的时代,人工智能(AI)已经从科幻小说中的概念变成了我们日常生活中不可或缺的一部分。从智能家居到自动驾驶汽车,从医疗诊断到金融服务,AI正以惊人的速度重塑着我们的世界。 一、工作方式的革新…...

springboot中——Logback介绍
程序中的日志,是用来记录应用程序的运行信息、状态信息、错误信息等。 Logback基本使用 springboot的依赖自动传递了logback的依赖,所以不用再引入依赖 之后在resources文件下创建logback.xml文件,写入 <?xml version"1.0" …...

【Tomcat】第一站:理解tomcat与Socket
目录 1. Tomcat 1.1 Tomcat帮助启动http服务器。 1.2 tomcat理解: 2. 计算机网络最基本的流程 2.1 信息是怎么来的? 2.2 端口是干什么的? 3. 简单的Socket案例 服务端 客户端 启动: 3.2 在Tomcat发送信息,看…...

TQ15EG开发板教程:使用SSH登录petalinux
本例程在上一章“创建运行petalinux2019.1”基础上进行,本例程将实现使用SSH登录petalinux。 将上一章生成的BOOT.BIN与imag.ub文件放入到SD卡中启动。给开发板插入电源与串口,注意串口插入后会识别出两个串口号,都需要打开,查看串…...

Java从入门到工作4 - MySQL
一:检测数据库网络 telnet 127.0.0.1 3306 注意ip和端口后之间是空格,不需要引号 二:SQL语法 1、创建结果集 SELECT 电视机 AS typeUNION SELECT 电冰箱UNION SELECT 洗衣机UNION SELECT 空调UNION SELECT 电脑UNION SELECT 热水器UNION…...

OpenShift 4 - 多云管理(2) - 配置多集群观察功能
《OpenShift / RHEL / DevSecOps 汇总目录》 本文在 OpenShift 4.17 RHACM 2.12 环境中进行验证。 文章目录 多集群观察技术架构安装多集群观察功能监控多集群的运行状态监控多集群的应用运行在被管集群监控应用运行在管理集群监控被管集群的应用运行 参考 多集群观察技术架构…...

【鸿睿创智开发板试用】RK3568 NPU的人工智能推理测试
目录 引言 驱动移植 例程编译 修改build.sh 执行编译 运行测试 部署libc的库文件 执行测试程序 结语 引言 鸿睿创智的H01开发板是基于RK3568芯片的,瑞芯微芯片的一大特色就是提供了NPU推理的支持。本文将对其NPU推理进行测试。 驱动移植 H01的开发板已经…...

Docker镜像与容器操作全攻略
❤️一:镜像:把镜像保存为文件(可放到其他虚拟机中运行): docker save -o centos-7.5-1804.tar(保存的文件名) centos:7.5.1804(仓库:标签)将镜像文件加载到本地镜像库&a…...

解决UE VR开发痛点:VRExpansionPlugin实战指南与架构优化
解决UE VR开发痛点:VRExpansionPlugin实战指南与架构优化 【免费下载链接】VRExpansionPlugin A UE4 VR framework 项目地址: https://gitcode.com/gh_mirrors/vr/VRExpansionPlugin 在UE VR开发中,开发者常面临手部追踪精度不足、交互系统复杂、…...

网盘提速工具终极指南:直链解析技巧与多平台实战方案
网盘提速工具终极指南:直链解析技巧与多平台实战方案 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云…...
)
新手必看:如何用OpenSCAP快速搞定Linux服务器安全基线检查(附CentOS实战)
从零到精通的OpenSCAP实战:CentOS安全基线检查全流程拆解 刚接手服务器运维的新手常会遇到这样的困惑:明明系统运行正常,安全团队却总说存在"配置风险"。去年我们团队就发生过一起因SSH弱加密算法导致的入侵事件——攻击者仅用2小时…...

GitHub中文界面终极指南:告别英文恐惧,5分钟让GitHub说中文
GitHub中文界面终极指南:告别英文恐惧,5分钟让GitHub说中文 【免费下载链接】github-chinese GitHub 汉化插件,GitHub 中文化界面。 (GitHub Translation To Chinese) 项目地址: https://gitcode.com/gh_mirrors/gi/github-chinese 你…...

Qwen3-14B企业应用部署:从镜像拉取到API接入的完整流程
Qwen3-14B企业应用部署:从镜像拉取到API接入的完整流程 1. 镜像概述与核心优势 Qwen3-14B私有部署镜像是专为企业级AI应用场景打造的优化版本,基于通义千问大语言模型深度定制。这个镜像最显著的特点是开箱即用——所有运行环境和模型依赖都已预装完毕…...

从Simulink仿真到硬件实现:DAB双有源全桥的PID参数‘手感’如何传递?
从虚拟到现实:DAB双有源全桥PID参数迁移实战指南 当你在Simulink中看到完美的DAB动态响应波形时,那种成就感就像解开一道复杂的数学题。但现实往往给你当头一棒——同样的PID参数烧录到DSP后,示波器上的波形却像喝醉了一样东倒西歪。这不是你…...

OpenClaw+Qwen3-14B私有镜像实战:飞书机器人自动回复配置指南
OpenClawQwen3-14B私有镜像实战:飞书机器人自动回复配置指南 1. 为什么选择这个组合? 上周三凌晨2点,我被飞书消息提示音吵醒——团队新人又在加班调试代码。这已经是本周第三次了。作为技术负责人,我意识到需要一种更智能的解决…...

OpenClaw故障排查大全:Gemma-3-12b-it接口连接失败解决方案
OpenClaw故障排查大全:Gemma-3-12b-it接口连接失败解决方案 1. 问题背景与典型场景 上周我在本地部署Gemma-3-12b-it模型时,遭遇了OpenClaw连接失败的经典问题。明明模型服务已经启动,OpenClaw网关也显示运行正常,但每次发起请求…...

LN2266 超小型 低电压启动 PWM 控制 升压 DC/DC 电压调整器
■ 产品概述 LN2266 是一款微型、高效率、升压 DC/DC 调整器。电路由电流模 PWM 控制环路,误差放大器,斜波产生电路,比较器和一个功率开关等模块组成。该芯片可在较宽负载范围内高效稳定的工作。低于 1V 的启动电压,可以使用 1-4节…...