VisionMaster4.4 python脚本 图像处理 转换函数 爱之初体验
最近有接触过一丢丢VM4.3的模块开发. 一直有把python图像处理部分模块移植进来的打算 不过时间不够没来得及折腾.偶尔发现4.4支持py脚本 于是拿来折腾.一下午.
发现4.4支持python脚本,好开心.
首先安装VM4.4 注意一定要是4.4
打开后拖了一个模块.
但是发现import numpy import cv2 都报错.
python没有这些怎么玩? 咱好歹自学过几天python 不能放弃吧?
于是抱着试一试的态度?
开始以为路径是
C:\Program Files\VisionMaster4.4.0\Applications\Module(sp)\x64\Logic\PyShellModule后来搜索感觉是这里:
C:\Program Files\VisionMaster4.4.0\Applications\ModuleProxy\x64python.exeC:\Program Files\VisionMaster4.4.0\Applications\ModuleProxy\x64\Scripts
pip.exe
好了,在这里按住shift右击 >>在此处打开powershell窗口 输入cmd
然后 尝试性的在此文件夹里 pip install numpy 当运行 import numpy as np 发现已经不报错了.
好了 现在直接在这个窗口:安装
pip install numpy
pip install opencv-python
pip install pillow
pip install matplotlib
# 我暂时只需要这么多 够用 你也可以安装别的哈哈:
接下来又遇到难题:
官方文档只介绍输入输出图像的结构体: 没有示例程序.难搞.
结构体定义如下:
# 图像数据
class ImageData:def __init__(self):self.width = Noneself.height = Noneself.pixel_format = Noneself.buffer = Noneself.dataLen = None
其他类型 数据结构比较简单 见名知意: 好吧还是放出来吧:
# 路径 文件名
#C:\Program Files\VisionMaster4.4.0\Applications\Module(sp)\x64\Logic\PyShellModule
#组合数据类型字段定义.py# ROI圆环
class RoiAnnulus:def __init__(self):self.center_x = Noneself.center_y = Noneself.inner_radius = Noneself.outer_radius = Noneself.start_angle = Noneself.angle_extend = None# 圆
class Circle:def __init__(self):self.radius = Noneself.center_x = Noneself.center_y = None# 椭圆
class ELLIPSE:def __init__(self):self.center_x = Noneself.center_y = Noneself.major_radius = Noneself.minor_radius = Noneself.angle = None# 位置修正信息
class Fixture:def __init__(self):self.init_point_x = Noneself.init_point_y = Noneself.init_angle = Noneself.init_scale_x = Noneself.init_scale_y = Noneself.run_point_x = Noneself.run_point_y = Noneself.run_angle = Noneself.run_scale_x = Noneself.run_scale_y = None# 图像数据
class ImageData:def __init__(self):self.width = Noneself.height = Noneself.pixel_format = Noneself.buffer = Noneself.dataLen = None# 直线
class Line:def __init__(self):self.start_point_x = Noneself.start_point_y = Noneself.end_point_x = Noneself.end_point_y = None# 点
class Point:def __init__(self):self.point_x = Noneself.point_y = None# 轮廓
class PointSet:def __init__(self):self.buffer = Noneself.dataLen = None# 矩形
class Rect:def __init__(self):self.rect_x = Noneself.rect_y = Noneself.width = Noneself.height = None# Box
class RoiBox:def __init__(self):self.center_x = Noneself.center_y = Noneself.width = Noneself.height = Noneself.angle = None# 多边形
class RoiPolygon:def __init__(self):self.point_num = Noneself.point_x = Noneself.point_y = None# 圆环
class Annulus:def __init__(self):self.center_x = Noneself.center_y = Noneself.inner_radius = Noneself.outer_radius = Noneself.start_angle = Noneself.angle_extend = None直接上程序: 自己摸索的 输入输出 官方可没有示例 噢
# coding: utf-8
from ioHelper import *# pip install opencv-python
# pip install numpyimport os,sys,time
import cv2
import numpy as npdef Imagetonumpy(ImageData):# 将二进制数据转换为 NumPy 数组image_array = np.frombuffer(ImageData.buffer, dtype=np.uint8)# 调整数组形状为 (height, width, channels) # 图是3 通道 就选3 1通道就选1if (int(len(ImageData.buffer)) == int(ImageData.width*ImageData.height)):channels=1else:channels=3image_array = image_array.reshape((ImageData.height, ImageData.width,channels))if channels==3:image_array = cv2.cvtColor(image_array, cv2.COLOR_RGB2BGR)return image_array
#*******************************************************************************************
def numpytoImage(numpy_image):"""将 NumPy 数组转换为 ImageData 结构体。参数:numpy_image: NumPy 数组,形状为 (height, width, channels) 或 (height, width)。返回:ImageData: 包含图像数据的结构体。"""# 检查 NumPy 数组的形状if len(numpy_image.shape) == 1: # 灰度图像height, width,channels = numpy_image.shapechannels = 1elif len(numpy_image.shape) == 3: # 彩色图像height, width, channels = numpy_image.shapeelse:raise ValueError("NumPy 数组形状不正确!")if channels == 3:numpy_image = cv2.cvtColor(numpy_image, cv2.COLOR_RGB2BGR)buffer = numpy_image.tobytes()# 将 NumPy 数组转换为二进制数据# 创建 ImageData 结构体image_data = ImageData()image_data.width = widthimage_data.height = heightif channels == 3:image_data.pixel_format = 35127316 # 假设像素格式与原函数一致 35127316 if channels == 1: image_data.pixel_format = 17301505 # 假设像素格式与原函数一致 35127316 image_data.buffer = bufferimage_data.dataLen = width*height*channels#image_data.pixel_format 必须正确 否则图像报错 我也不知带这个是啥格式啥结构 # 但是可以通过 输入图像 tmpimg.pixel_format 获取 这个数值#localVar = IoHelper(data, INIT_LOCAL_VAR)#tmpimg = moduleVar.img #读取图像#{tmpimg.width}// 宽度 759#{tmpimg.height}//高度 658#{tmpimg.pixel_format}return image_data def Process(data) -> int:"""Write custom logic code inside the Process method. Return 0 for success or any other value for failure.""""""在Process方法内编写自定义逻辑代码, 成功返回0, 返回其他值表示失败""""""Do not delete this code block.""""""请勿删除此处代码"""moduleVar = IoHelper(data, INIT_MODULE_VAR)globalVar = IoHelper(data, INIT_GLOBAL_VAR)localVar = IoHelper(data, INIT_LOCAL_VAR)tmpimg = moduleVar.img #读取图像moduleVar.outstr = fr"""{tmpimg.width}// 宽度 759{tmpimg.height}//高度 658{tmpimg.pixel_format}//像素格式 //35127316[tmpimg.buffer]//图像数据 二进制{tmpimg.dataLen}//数据长度 //1498266{os.getcwd()}{int(len(tmpimg.buffer))}{int(tmpimg.width*tmpimg.height)}{int(len(tmpimg.buffer)) == int(tmpimg.width*tmpimg.height)}"""image_array=Imagetonumpy(tmpimg)#image = cv2.imread(tmpimg)# 使用 OpenCV 显示图像#blank_image = np.ones((200, 200, 1), dtype=np.uint8) * 255#numpy_image = np.zeros((100,100,3),dtype=np.uint8)#cv2.imshow("Image", image_array)#cv2.waitKey(2000)#cv2.destroyAllWindows()imgooop=numpytoImage(image_array)moduleVar.imgout=imgooop"""Variable initialization, to access input and output variables within the Process method.""""""变量初始化, 进入Process方法后首先调用, 否则无法访问输入、输出变量""""""* Input and output variables:* 输入、输出变量Input variables are read-only and cannot be modified; output variables are write-only and cannot be read.输入变量为只读, 不可以修改; 输出变量为只写, 不可以读取;Assume: the name of the input variable is 'in0', of type int. Its value can be obtained using tmp = moduleVar.in0假设: 输入变量名为in0, 类型为int, 可通过tmp = moduleVar.in0 读取该变量的值Assume: the name of the output variable is 'out0', of type int. Its value can be set using moduleVar.out = 9假设: 输出变量名为out0, 类型为int, moduleVar.out = 9 设置该变量的值Global variables:* 全局变量Assume: the name of the global variable is 'var0', of type int. Its value can be obtained using tmp = globalVar.GetValue('var0')假设: 输入变量名为var0, 类型为int, 可通过tmp = globalVar.GetValue('var0') 读取该变量的值, 通过 globalVar.SetValue('var0', 123) 设置该变量的值Local variables:* 局部变量Assume: the name of the local variable is 'var0', of type int. Its value can be obtained using tmp = localVar.GetValue('var0')假设: 输入变量名为var0, 类型为int, 可通过tmp = localVar.GetValue('var0') 读取该变量的值, 通过 localVar.SetValue('var0', 123) 设置该变量的值** All variables should be used strictly based on their types. If there is a need for type conversion, explicit conversion should be performed in the user code.** 所有变量都需要严格根据变量类型使用, 若有类型转换的需求, 应在用户代码内通过显示转换代码进行类型转换。Example code:示例代码如下:width = moduleVar.width + 100moduleVar.out0 = width / 2 + 20if moduleVar.in1 == 'OK':moduleVar.out1 = "OK"moduleVar.out0 = globalVar.GetValue('var0')moduleVar.out1 = localVar.GetValue('var0')globalVar.SetValue('var1', 123)localVar.SetValue('var1', moduleVar.out2)Note: Python indentation must be 4 spaces注意: Python的缩进必须为4个空格。编写自定义代码,替换下方的默认代码 passWrite custom code to replace the default code below.""""try:#PrintMsg("\nUser code start")pass#PrintMsg("User code end")except BaseException as e:PrintMsg(e)return 0
仔细看 就是2个转换函数: process是被调用方
注意 tmpimg.pixel_format 我没搞懂啥格式.就是一串数字,但是 输入图像是多少,输出就写多少就没有问题.
美中不足的是VM 用的 python3.7 64位 如果是python3.8 那么python 版本的halcon也可以支持
相关文章:
VisionMaster4.4 python脚本 图像处理 转换函数 爱之初体验
最近有接触过一丢丢VM4.3的模块开发. 一直有把python图像处理部分模块移植进来的打算 不过时间不够没来得及折腾.偶尔发现4.4支持py脚本 于是拿来折腾.一下午. 发现4.4支持python脚本,好开心. 首先安装VM4.4 注意一定要是4.4 打开后拖了一个模块. 但是发现import numpy imp…...

线程池的使用 + MD5加密 + 枚举类
文章目录 1、线程池的使用2、MD5算法的使用3、多用枚举类 整理下近期干活儿遇到的一些坑。 1、线程池的使用 不合理点1:jstack线程转储发现,有几万个线程,查看代码发现,线程池放在方法内部或者循环体中创建,尽管方法…...

[qt5学习笔记]Application Example示例程序源码解析
开发环境问题 vs2022下直接打开ui、ts文件失败 解决办法如下图, 设置designer独立运行。估计是嵌入运行存在些许bug。 同理,ts编辑工具linguist也存在这个问题。 qrc rc的编辑嵌入编辑都正常,但分离式更稳定可靠。 qt creator编译失败 原…...

【在时光的棋局中修行——论股市投资的诗意哲学】
在时光的棋局中修行——论股市投资的诗意哲学 引子:数字之海与星辰之约 在经纬交织的K线图里,我常看见银河倾泻的轨迹。那些跳动的数字如同繁星坠落,在午夜时分编织着财富的密码。炒股之道,是理性与诗意的交响,是数据…...

IB网络错误检查工具ibqueryerrors
ibqueryerrors 是一个用于查询 InfiniBand 网络中错误统计信息的工具。它可以帮助网络管理员识别和诊断网络问题,如丢包、重传和其他通信错误。这个工具通常是 InfiniBand 管理软件包的一部分,例如 OpenSM(Open Subnet Manager)。…...
「vue3-element-admin」Vue3 + TypeScript 项目整合 Animate.css 动画效果实战指南
🚀 作者主页: 有来技术 🔥 开源项目: youlai-mall ︱vue3-element-admin︱youlai-boot︱vue-uniapp-template 🌺 仓库主页: GitCode︱ Gitee ︱ Github 💖 欢迎点赞 👍 收藏 ⭐评论 …...

论文阅读 DOES END-TO-END AUTONOMOUS DRIVING REALLY NEED PERCEPTION TASKS?
端到端的强势来袭,好久了~~~ 简单翻译:端到端真的需要感知任务嘛? code https://github.com/PeidongLi/SSR. https://arxiv.org/pdf/2409.18341 1. 摘要 端到端自动驾驶(E2EAD)方法通常依赖于监督式感知任务来提取显…...
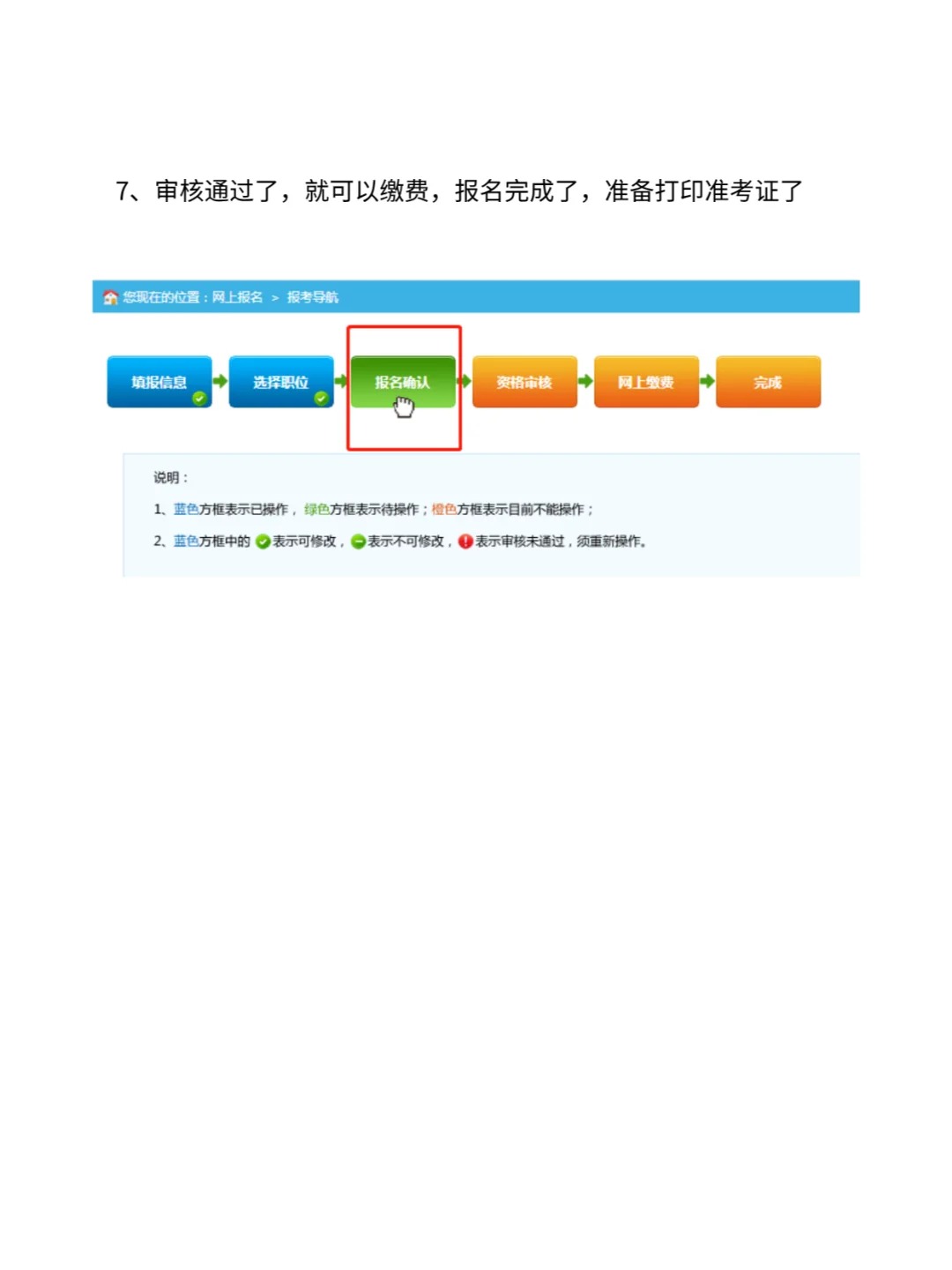
25年黑龙江省考报名流程详细教程
2025年黑龙江省考报名马上就要开始报名啦! 有想要参加黑龙江省考报名的同学,可以提前了解一下考试报名流程,熟悉考试报名照要求! 一、考试时间安排 报名时间:2月18日9:00至2月23日17:00 缴费时间:2月18日…...

基于SpringBoot的小区运动中心预约管理系统
作者:计算机学姐 开发技术:SpringBoot、SSM、Vue、MySQL、JSP、ElementUI、Python、小程序等,“文末源码”。 专栏推荐:前后端分离项目源码、SpringBoot项目源码、Vue项目源码、SSM项目源码、微信小程序源码 精品专栏:…...

部署postgresql_exporter监控pgsql
部署exporter配置监控job配置告警规则 一键部署脚本 #!/bin/bash# 定义变量 PG_HOST"xx.ap-southeast-1.rds.amazonaws.com" PG_PORT"5432" PG_PASSWORD"bagayalu321" PG_USER"monitor_user" EXPORTER_VERSION"0.16.0" #…...

Mac本地部署deepseek
Ollama 运行deepseek需要本地运行工具ollama,安装路径如下 ollama官方网站 (https://ollama.com/download) 下载Mac版ollama,点击移至application下面 DeepSeek R1 14b 通过ollama安装deepseek,对应的运行指令可通过 deepseek本地部署列表…...

huggingface+下载deepseek8b lamda+本地部署 笔记
步骤倒过来 1.python hf_download.py --model unsloth/DeepSeek-R1-Distill-Llama-8B-GGUF model后加模型名(HF-Mirror中查) 【huggingface模型下载不下来?这里教你万能解决办法~huggingface小白使用指南。】 https://www.bilibili.com/video…...

中上211硕对嵌入式AI感兴趣,如何有效规划学习路径?
今天给大家分享的是一位粉丝的提问,中上211硕对嵌入式AI感兴趣,如何有效规划学习路径? 接下来把粉丝的具体提问和我的回复分享给大家,希望也能给一些类似情况的小伙伴一些启发和帮助。 同学提问: 中上211,…...

Jedis 客户端 用于java连接redis服务
<dependency><groupId>redis.clients</groupId><artifactId>jedis</artifactId...

车载诊断数据库 --- 通用性诊断数据库ODX
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 简单,单纯,喜欢独处,独来独往,不易合同频过着接地气的生活,除了生存温饱问题之外,没有什么过多的欲望,表面看起来很高冷,内心热情,如果你身…...
)
docker 基础命令使用(ubuntu)
docker 状态查询 docker ps docker ps -adocker --version docker info docker --help docker run --help docker ps --help ...docker 操作镜像命令 docker imagesdocker rmi 镜像id/镜像名docker 操作容器命令 docker ps docker ps -adocker run 命令 # 端口映射 -p 参数…...

IDEA集成DeepSeek
引言 随着数据量的爆炸式增长,传统搜索技术已无法满足用户对精准、高效搜索的需求。 DeepSeek作为新一代智能搜索技术,凭借其强大的语义理解与深度学习能力,正在改变搜索领域的游戏规则。 对于 Java 开发者而言,将 DeepSeek 集成…...
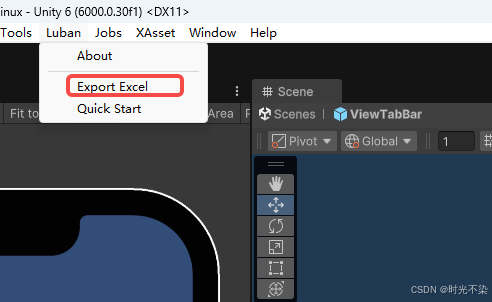
Unity 接入Luabn记录图解
Luban 文档及链接项目目录UnityEditor 导表工具 文档及链接 官方文档 最新版本 项目目录 接入的方法有很多,我这里随便找了一种 https://gitee.com/focus-creative-games/luban_examples.git如上图,git拉去后,只保留圈起来的2个文件夹。…...

【MySQL】我在广州学Mysql 系列——Mysql 日志管理详解
ℹ️大家好,我是练小杰,今天又是新的一周了,又该摆好心态迎接美好的明天了!!!😆 本文主要对Mysql数据库中的日志种类以及基本命令进行讨论!! 回顾:Ǵ…...

【线段树 二分查找】P3939 数颜色|普及+
本文涉及知识点 C线段树 C二分查找 P3939 数颜色 题目背景 大样例可在页面底部「附件」中下载。 题目描述 小 C 的兔子不是雪白的,而是五彩缤纷的。每只兔子都有一种颜色,不同的兔子可能有 相同的颜色。小 C 把她标号从 1 到 n n n 的 n n n 只兔…...

WarcraftHelper:让你的魔兽争霸3在现代电脑上焕然新生的终极指南
WarcraftHelper:让你的魔兽争霸3在现代电脑上焕然新生的终极指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还记得那些年,…...

Bun用Claude自己“换心手术“?AI重构软件的新纪元来了
五月中旬的编程界上演了一出荒诞又魔幻的戏码——Bun,这个曾以 Zig 语言为傲的 JavaScript 运行时,在短短六天时间里,由被它拖累的 Claude AI 亲手把自己从 Zig 重写成 Rust 语言。事情得从两年前说起。2024年,Bun 创始人 Jarred …...

3PEAK思瑞浦 TP2272-SO1R SOP8 精密运放
特性 增益带宽积:7MHz 高斜率:20V/us 宽电源范围:3.1V至36V或2.25V至18V 低失调电压:0.5mV(最大值) 低输入偏置电流:30pA(典型值) 轨到轨输出电压范围 单位增益稳定: 工作温度范围:-40C至125C...

2026公考培训机构综合评测:粉笔教育领跑,线上线下一体化成关键优势
【评测说明】 2026年公考培训市场持续分化,考生在选择机构时,不再只看“名师”或“价格”,而是综合考量上榜概率、资金安全、学习便捷性。本文从上岸数据可验证性、性价比、退费效率、师资体系稳定性、线上线下覆盖能力五大维度,对…...

从手机拍照到工业质检:聊聊自适应白平衡算法在实际项目里的那些‘坑’
从手机拍照到工业质检:自适应白平衡算法的实战避坑指南 在工业视觉检测线上,一台价值百万的自动化设备突然频繁误判产品颜色——原因竟是车间顶灯老化导致色温偏移,而算法团队引以为傲的"完美反射"白平衡模型完全失效。类似场景每天…...

Angular 17与Firebase全栈实战:从零构建现代化Web应用
1. 项目概述:一个基于 Angular 17 的现代化 Web 应用最近接手并重构了一个名为 Ditectrev 的 Web 项目,它本质上是一个功能性的前端应用,旨在解决特定领域的信息展示与交互需求。这个项目最初由 Angular CLI 17.3.17 生成,但原始的…...

从零到一:DPDK高性能网络开发实战指南
1. 为什么你需要了解DPDK? 如果你正在开发需要处理高吞吐量网络数据的应用,比如视频流服务器、金融交易系统或者云计算平台,传统的Linux网络栈可能会成为性能瓶颈。我亲身经历过一个项目,用传统方式开发的网关每秒只能处理30万包…...
JiT源码深度剖析:从Denoiser到Transformer的完整实现
JiT源码深度剖析:从Denoiser到Transformer的完整实现 【免费下载链接】JiT PyTorch implementation of JiT https://arxiv.org/abs/2511.13720 项目地址: https://gitcode.com/gh_mirrors/jit8/JiT JiT(Just image Transformer)是一个…...

华大HC32F4A0 RS485通信避坑指南:从PCLK时钟疑惑到DMA地址偏移的完整排错记录
HC32F4A0 RS485实战:从时钟配置到DMA接收的工程化实现 调试华大半导体的HC32F4A0芯片进行RS485通信时,时钟配置、USART初始化和DMA接收这三个环节最容易出现隐蔽性问题。本文将结合具体工程案例,分享如何规避PCLK时钟分频陷阱、解决RTOF标志异…...
)
【AI 越强越离不开工具】:2026 年大模型开发者必备的工具链全景实战(附代码 + 架构图)
前言 目录 前言 一、核心悖论:为什么 AI 越强大,反而越依赖工具? 二、核心拆解:从 Tool 到 Skill 到 Agent,工具链的三层进化逻辑 三、2026 年 AI 工具链全景架构图 四、四大核心工具模块实战(附可直…...