FreeRTOS-rust 编译分析
目录介绍
FreeRTOS-rust
├── .cargo # 对 cargo 本身的配置
│ └── config.toml
├── Cargo.toml # 对当前工作空间的配置
├── freertos-cargo-build # 负责对 freertos 源码进行编译
│ ├── Cargo.toml # 对当前 package 进行配置
│ └── src
│ └── lib.rs
├── freertos-rust # 负责编译 freertos 的 rust 接口层
│ ├── Cargo.toml # 对当前 package 进行配置
│ ├── build.rs # package 编译前自动调用的脚本
│ └── src # 适配层源码
│ ├── allocator.rs
│ ├── base.rs
│ ├── critical.rs
│ ├── delays.rs
│ ├── event_group.rs
│ ├── freertos # freertos C 接口适配层和实现的钩子函数
│ │ ├── ports
│ │ │ └── arm
│ │ │ └── hooks.c
│ │ └── shim.c
│ ├── hooks.rs
│ ├── isr.rs
│ ├── lib.rs
│ ├── mutex.rs
│ ├── patterns
│ │ ├── compute_task.rs
│ │ ├── mod.rs
│ │ ├── processor.rs
│ │ └── pub_sub.rs
│ ├── portmacro.h
│ ├── prelude
│ │ ├── mod.rs
│ │ └── no_std.rs
│ ├── queue.rs
│ ├── semaphore.rs
│ ├── shim.rs
│ ├── task.rs
│ ├── timers.rs
│ ├── units.rs
│ └── utils.rs
├── freertos-rust-examples # freertos 应用示例
│ ├── Cargo.toml # 对当前 package 进行配置
│ ├── FreeRTOS-Kernel # freertos 内核C源码
| ├── freertos-addons # freertos 扩展库C++源码(无需关注)
│ ├── build.rs # package 编译前自动调用的脚本
│ └── examples # 各平台的rust freertos 应用开发示例
│ ├── linux
│ ├── nrf9160
│ ├── stm32-cortex-m3
│ ├── stm32-cortex-m4-blackpill
│ └── win
└── publish-all.sh
框架介绍
FreeRTOS-rust 的整体框架分为三大块 freertos-cargo-build、freertos-rust、freertos-rust-examples。
freertos-cargo-build 负责对项目中所有 C语言代码的编译,包括 FreeRTOS-Kernel 内核源码,freertos C 适配层接口以及 freertos 各种钩子函数实现,内部利用cc crate以及build.rs文件中提供的信息,将C语言代码打包为静态库。
freertos-rust 中包括了 freertos 的C适配层接口和钩子函数实现,以及转换为 rust 语言的对外接口,应用开发使用的 rust freertos 接口均来自这里。
freertos-rust-examples 中包括了 freertos 的C语言内核源码以及各平台的 rust 应用示例。
编译体系
FreeRTOS-rust 项目中 C语言部分和各 rust package 的编译都是通过 cargo 工具完成,主要参与的文件有 cargo 配置文件(config.toml),项目 workspace 和各个 package 配置文件(Cargo.toml),以及编译依赖脚本(build.rs 和 lib.rs)。
cargo 配置文件
目录:./FreeRTOS-rust/.cargo/config.toml
config.toml 中的配置是对 cargo 工具本身的配置,只会对当前项目生效,可以对项目配置一些默认的行为,例如此处设置了目标架构为 arm,目标 os 为 none,那么就可以在项目中使用 CARGO_CFG_TARGET_ARCH 和 CARGO_CFG_TARGET_OS 环境变量来进行条件判断。
# 配置 CARGO_CFG_TARGET_ARCH 宏为arm, CARGO_CFG_TARGET_OS 宏为none
[target.'cfg(all(target_arch = "arm", target_os = "none"))']# 配置传递给 rust 编译器传递额外的编译参数
rustflags = [# LLD (shipped with the Rust toolchain) is used as the default linker"-C", "link-arg=-Tlink.x",# if you run into problems with LLD switch to the GNU linker by commenting out# this line# "-C", "linker=arm-none-eabi-ld",# if you need to link to pre-compiled C libraries provided by a C toolchain# use GCC as the linker by commenting out both lines above and then# uncommenting the three lines below# "-C", "linker=arm-none-eabi-gcc",# "-C", "link-arg=-Wl,-Tlink.x",# "-C", "link-arg=-nostartfiles",
]# 配置默认工具链版本
[rustup]
toolchain = "nightly"# 设置编译的目标平台,也可以通过 cargo build --target <name> 传递,设置到 TARGET 环境变量
[build]
# Pick a target or use --target <name>
# target = "x86_64-pc-windows-gnu" # Windows GNU Toolchain
# target = "x86_64-pc-windows-msvc" # Windows MSVC Toolchain (no debugging)
# target = "thumbv7m-none-eabi" # Cortex-M3
# target = "thumbv7em-none-eabihf" # Cortex-M4
workspace 配置文件
目录:./FreeRTOS-rust/ Cargo.toml
一个工作空间是由多个 package 组成的集合,共享同一个 Cargo.lock 文件、输出目录 target 和一些设置(例如 profiles : 编译器设置和优化)。工作空间由项目最外层的带有 [workspace] 项的 Cargo.toml 文件标识。
此处设置了工作空间成员的名称,每个成员下面必须要有自己的 Cargo.toml,并设置了整个工作空间在release 编译模式下的优化情况。
# 虚拟清单工作空间
[workspace]# 工作空间成员
members = ["freertos-rust","freertos-cargo-build","freertos-rust-examples"
]# 设置工作空间release时的优化情况
[profile.release]
codegen-units = 1 # better optimizations
# debug = true # symbols are nice and they don't increase the size on Flash
lto = true # better optimizations
# opt_level=3
package 配置文件
freertos-cargo-build 配置文件
这里的配置文件主要是设置当前 package 打包成静态库,静态库的默认名称为 freertos-cargo-build.rlib ,以便被其他 rust 代码调用进行 C代码编译。 并且配置C代码编译器依赖包 cc 和 walkdir。
[package]
name = "freertos-cargo-build"
description = """
Utility lib for building & using FreeRTOS in rust projects inside the build.rs.
"""
version = "0.1.1"
authors = ["Tobias Kaupat <tk@lobaro.de>"]
edition = "2018"
license = "MIT"
readme = "README.md"
repository = "https://github.com/lobaro/FreeRTOS-rust"# 默认需要打包成 freertos-cargo-build.rlib 静态库
[lib]# 配置package依赖的包
[dependencies]
cc = "1.0.52"
walkdir = "2.3.1"
freertos-cargo-build/src/lib.rs 的作用是收集项目中所有的 C文件和头文件目录,并实现 pub fn compile(&self) -> Result<(), Error> 函数,在函数中调用 cc::Build::new().try_compile(“freertos”) 进行 C语言静态库的生成,这样在其他 rust 文件中就可以调用 compile 来完成C语言文件的编译了。
freertos-rust 配置文件
这个配置文件中设置了 package 编译为库后的名称为 freertos_rust,编译入口文件在 src/lib.rs 中,并在编译入口文件中根据 [features] 的配置决定需要启用哪些模块。这里编译产生的库将会被 rust 应用所使用,以便使用 FreeRTOS 的功能。
[package]
name = "freertos-rust"
version = "0.1.2"
authors = ["Tobias Kaupat <tk@lobaro.de>"]
edition = "2018"
description = """
Create to use FreeRTOS in rust projects.
The freertos-cargo-build crate can be used to build and link FreeRTOS from source inside build.rs.
"""
keywords = ["FreeRTOS", "embedded", "demo", "library"]
license = "MIT"
readme = "README.md"
repository = "https://github.com/lobaro/FreeRTOS-rust"
links = "freertos"# 设置静态库的名称为 freertos_rust.rlib, 编译入口文件在 src/lib.rs 中
[lib]
name = "freertos_rust"
path = "src/lib.rs"# 配置启用的特性,也就是配置哪些模块生效
[features]
default = ["allocator", "sync", "time", "hooks", "interrupt", "delete_task"]
allocator = []
sync = ["interrupt"]
time = ["interrupt"]
hooks = []
interrupt = []
cpu_clock = []
delete_task = []
freertos-rust-examples 配置文件
此配置需要先设置编译依赖的源文件路径,所以在工作成员中 freertos-cargo-build 优先被编译,生成C编译器,用于后期 C代码的编译。然后设置一般依赖的源文件路径,所以 FreeRTOS 的 rust 适配层 freertos-rust 也被优先编译,作为静态库被后期的应用代码使用。其次就是设置对应平台的硬件依赖库。
[package]
name = "freertos-rust-examples"
version = "0.1.1"
authors = ["Tobias Kaupat <tk@lobaro.de>"]
edition = "2018"
description = """
Create to use FreeRTOS in rust projects. It contains binaries for demos on some architecutres.
"""
keywords = ["FreeRTOS", "embedded", "demo", "examples"]
repository = "https://github.com/lobaro/FreeRTOS-rust"# 配置普通依赖的源码路径,所以freertos-rust也需要被优先编译
[dependencies]
freertos-rust = {path = "../freertos-rust"}# 根据 config.toml 配置设置依赖包
[target.'cfg(target_arch = "arm")'.dependencies]
cortex-m = {version = "0.7.7", features = ["critical-section-single-core"]}
cortex-m-rt = "0.7.3"# 根据config.toml 配置或 --target <triple> 的配置设置依赖包
# Example: stm32-cortex-m3, [target.<triple>.dependencies] triple form cargo build --target thumbv7m-none-eabi
# or form .cargo/config.toml [build] target = "thumbv7m-none-eabi"
[target.thumbv7m-none-eabi.dependencies]
nb = "0.1.2"
embedded-hal = "0.2.3"
panic-halt = "0.2.0"
stm32f1xx-hal = {version = "0.10.0", features = ["rt", "stm32f103"], default-features = false}# 配置编译依赖的源码路径,所以在工作成员中 freertos-cargo-build 优先被编译
[build-dependencies]
freertos-cargo-build = {path = "../freertos-cargo-build"}
🌀路西法的个人博客拥有更多美文等你来读。
相关文章:

FreeRTOS-rust 编译分析
目录介绍 FreeRTOS-rust ├── .cargo # 对 cargo 本身的配置 │ └── config.toml ├── Cargo.toml # 对当前工作空间的配置 ├── freertos-cargo-build # 负责对 freertos 源码进行编译 │ ├── Cargo.toml # 对当前 package 进行配置 │ └…...

【解决方法】vite-plugin-svg-icons使用中出现问题[vite] Cannot find package ‘fast-glob‘
问题长这样: 参考文章:https://medium.com/wumeng9028/vite-plugin-svg-icons-error-cannot-find-package-fast-glob-8cb03d19c0ac 解决方法:pnpm add fast-glob -D package.json {"vite-plugin-svg-icons": "2.0.1"…...

[Qt] 使用QUndoStack运行到cmd->isObsolete()崩溃
redo/undo中又push了 崩溃情况崩溃原因解决方法 崩溃情况 在正常调用QUndoStack的redo/undo时,崩溃在了这里 unknown:0 QWidget: Cannot create a QWidget without QApplication. 崩溃原因 在正常调用QUndoStack的redo/undo时,因为自身的逻辑处理&a…...

大白话实战Sentinel
Sentinel是SpringCloudAlibaba提供的用来做服务保护的框架,而服务保护的常见手段就是限流和熔断降级。在大型分布式系统里面,由于微服务众多,所以服务之间的稳定性需要做特别关注,Sentinel的核心包就提供了从多个维度去保护服务稳定的策略,而且这些保护策略都可以连接上Se…...

DL/CV领域常见指标术语(FLOPS/mIoU/混淆矩阵/F1-measure)------一篇入门
1. FLOPS、FLOPs和GFLOPs FLOPS: floating-point operations per second,每秒浮点运算次数,用来衡量硬件性能。 FLOPs:floating point of operations,是浮点运算次数,用来衡量算法、模型的复杂度。 GFLOPSÿ…...
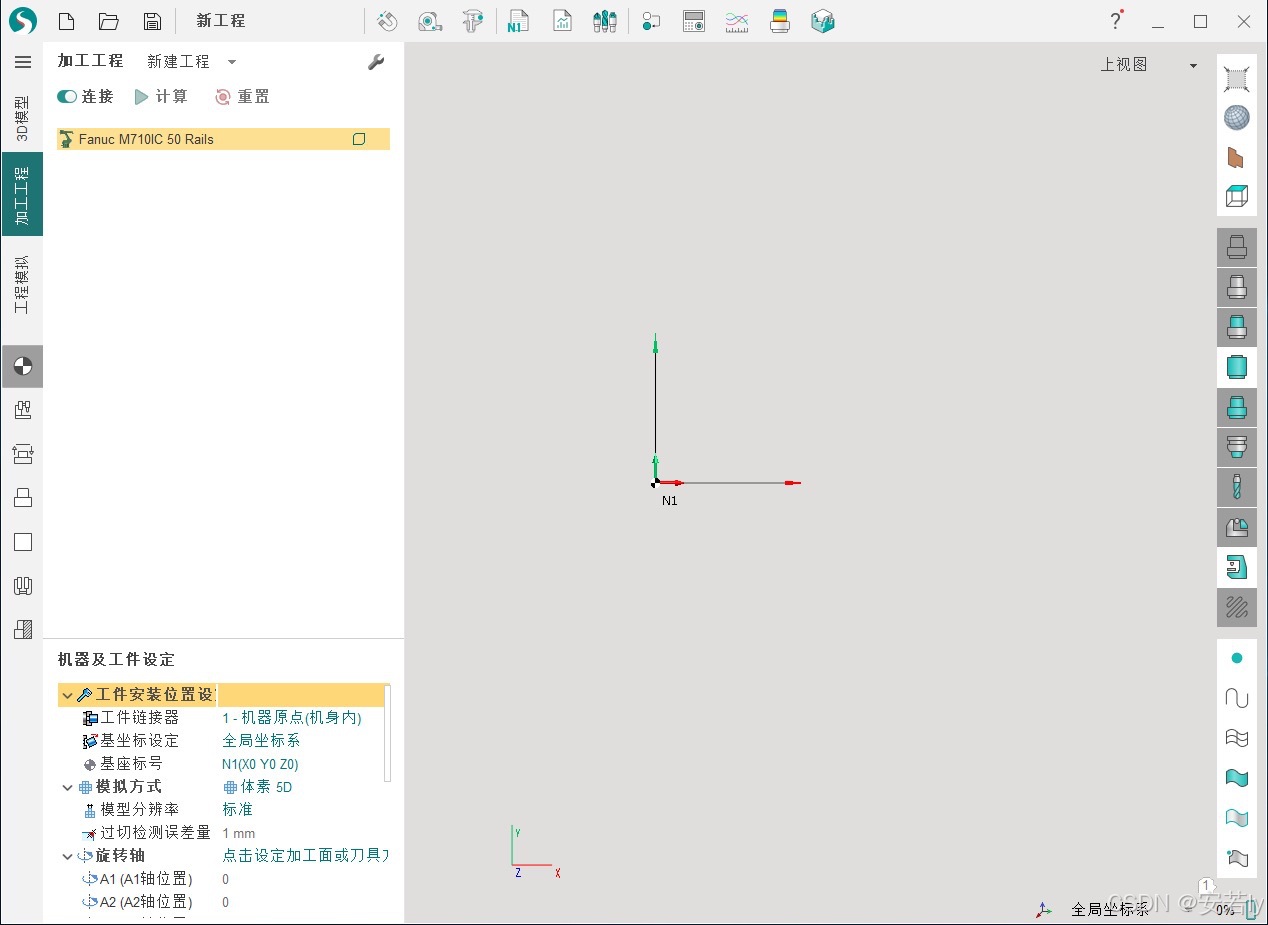
SprutCAMX16数控软件介绍
SprutCAM X 16 是一款功能强大的CAM(计算机辅助制造)软件,专为数控机床编程和制造过程优化设计。它广泛应用于机械加工、模具制造、3D打印等领域,支持多轴加工、车铣复合、机器人加工等多种加工方式。以下是SprutCAM X 16的主要特…...
Miniconda + VSCode 的Python环境搭建
目录: 安装 VScode 安装 miniconda 在VScode 使用conda虚拟环境 运行Python程序 1.安装 vscode 编辑器 官网链接:Visual Studio Code - Code Editing. Redefined 下载得到:,双击安装。 安装成功…...

TRELLIS 部署笔记
目录 依赖项安装 kaolin安装: 安装和运行报错解决 u2net.onnx 下载 解决方法,就是自行下载,然后拷贝到目录/root/.u2net bash测试u2net: 报错GaussianRasterizationSettings.__new__() got an unexpected keyword argument…...

深入解析Qt事件循环
在Qt开发中,QApplication::exec()这行代码是每个开发者都熟悉的“魔法咒语”。为什么GUI程序必须调用它才能响应操作?为何耗时操作会导致界面冻结?本文将以事件循环为核心,揭示Qt高效运转的底层逻辑,探讨其设计哲学与最…...

Visual Studio Code 集成 Baidu Comate
文章目录 安装Baidu Comate插件 安装Baidu Comate插件 从左主侧栏中 点击 【扩展】这个图标,然后在上方输入栏中输入 baidu comate —>选中列出的Bai Comate —>点击 【安装】按钮,等待安装完毕…...

「正版软件」PDF Reader - 专业 PDF 编辑阅读工具软件
PDF Reader 轻松查看、编辑、批注、转换、数字签名和管理 PDF 文件,以提高工作效率并充分利用 PDF 文档。 像专业人士一样编辑 PDF 编辑 PDF 文本 轻松添加、删除或修改 PDF 文档中的原始文本以更正错误。自定义文本属性,如颜色、字体大小、样式和粗细。…...

Kafka消息服务之Java工具类
注:此内容是本人在另一个技术平台发布的历史文章,转载发布到CSDN; Apache Kafka是一个开源分布式事件流平台,也是当前系统开发中流行的高性能消息队列服务,数千家公司使用它来实现高性能数据管道、流分析、数据集成和关…...

迪威模型网:免费畅享 3D 打印盛宴,科技魅力与趣味创意并存
还在为寻找优质3D打印模型而发愁?快来迪威模型网(https://www.3dwhere.com/),一个集前沿科技与无限趣味于一体的免费3D打印宝藏平台! 踏入迪威模型网,仿佛开启一场未来科技之旅。其“3D打印”专区ÿ…...

ECharts极简入门
ECharts 是一个基于 JavaScript的开源可视化图表库,广泛应用于数据可视化的场景中,支持多种图表类型,如柱状图、折线图、饼图、散点图、雷达图等,且具有强大的自定义功能。 1. ECharts 基本使用 首先需要引入 ECharts 库…...

PHP培训机构教务管理系统小程序源码
🔑 培训机构教务管理系统——智慧教育,高效管理新典范 🚀 这款教务管理系统,是基于前沿的ThinkPHP框架与Uniapp技术深度融合,匠心打造的培训机构管理神器。它犹如一把开启高效运营与精细管理的金钥匙,专为…...

JAVA学习第五天
接口的变量定义固定为静态变量 接口里面只能有抽象方法,且不能有构造方法 如果不重写tostring方法,会打印没有价值的信息...

pnpm和npm安装TailwindCss
npm下载及初始化来自Tailwind官方文档 npm下载: npm install -D tailwindcss npm初始化Tailwind: npx tailwindcss init pnpm下载: pnpm add -D tailwindcss3.4.1 postcss autoprefixer pnpm初始化Tailwind: pnpm exec tailwindc…...

【云安全】云原生-K8S(四)安全问题分析
Kubernetes(K8S)因其强大的容器编排能力成为了云计算和微服务架构的首选,但同时也带来了复杂的安全挑战。本文将概述K8S的主要安全问题,帮助安全工程师理解潜在威胁,并采取相应的防护措施。 K8S 攻击面概览 下面两张…...

Cloud之快照存储(Cloud Snapshot Storage)
Cloud之快照存储 一、什么是快照 1. 快照的定义 快照(Snapshot)是一种记录某一时刻数据状态的技术。在计算机存储和虚拟化环境中,快照能够将文件系统或虚拟机的状态保存下来,以便以后能够回溯到某一特定时间点。快照通常用于备…...
-SPL实现)
cs106x-lecture11(Autumn 2017)-SPL实现
打卡cs106x(Autumn 2017)-lecture11 (以下皆使用SPL实现,非STL库,后续课程结束会使用STL实现) 1、diceRolls Write a recursive function named diceRolls accepts an integer representing a number of 6-sided dice to roll, and output all possibl…...

从零到全自动:一个人用OpenClaw重新定义“一人公司”
在现在的创业圈里,越来越多的人选择自己当老板,一个人撑起一个公司。这种“一人公司”虽然小,但灵活、效率高,特别适合想自己做点事的人。今天,我想和你聊聊,我是怎么用一个叫OpenClaw的工具,把…...

从RAW到YUV420:手把手教你用V4L2调试摄像头图像格式与解决画面异常
从RAW到YUV420:V4L2摄像头图像格式调试实战指南 当你在Linux系统上调试摄像头时,是否遇到过画面颜色异常、卡顿或者根本无法显示的情况?这些问题往往与图像格式的设置和处理密切相关。本文将带你深入理解从RAW到YUV420的图像格式转换过程&…...
)
避坑指南:DESeq2分析中你最容易忽略的5个细节(从样本信息表设计到结果解读)
避坑指南:DESeq2分析中你最容易忽略的5个细节(从样本信息表设计到结果解读) 当你第一次看到DESeq2输出的差异基因列表时,是否曾对某些结果产生过怀疑?或许你按照教程一步步操作,却发现结果与预期不符。这不…...

告别样本失衡:用PyTorch手把手实现Focal Loss,让你的目标检测模型更关注‘难啃的骨头’
用Focal Loss解决目标检测中的样本失衡难题:PyTorch实战指南 当你盯着训练日志里那些"虚高"的准确率指标时,是否注意到模型对小目标、遮挡目标的识别率始终低迷?这很可能不是数据标注的问题,而是经典交叉熵损失函数在面…...

如何永久保存微信聊天记录?WeChatMsg免费开源工具完整指南
如何永久保存微信聊天记录?WeChatMsg免费开源工具完整指南 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/W…...
)
点云离群点去除:统计滤波 / 半径滤波 (Open3D)
文章目录 点云离群点去除:统计滤波 / 半径滤波 (Open3D) 一、任务 二、环境 三、统计滤波 3.1 原理 3.2 代码 3.3 参数调优 四、半径滤波 4.1 原理 4.2 代码 4.3 参数调优 五、组合使用 六、结果 七、下游应用 7.1 语义分割前处理 7.2 三维重建 7.3 下采样加速 八、调试 九、总…...

LLM Agents: 从大语言模型到自主智能体的演进与架构解析
LLM Agents: 从大语言模型到自主智能体的演进与架构解析 摘要 随着大语言模型(LLM)能力的飞跃,AI 的角色正在发生根本性的变化。从单纯的“对话机器人”向具备自主决策、环境感知和工具调用能力的“智能代理(Agents)”…...

Viper配置加密方案:安全存储敏感配置信息的终极指南
Viper配置加密方案:安全存储敏感配置信息的终极指南 【免费下载链接】viper Go configuration with fangs 项目地址: https://gitcode.com/gh_mirrors/vi/viper Viper作为Go语言生态中强大的配置管理工具,不仅提供了灵活的配置读取能力࿰…...

Cat-Catch终极指南:5步快速掌握浏览器资源嗅探工具
Cat-Catch终极指南:5步快速掌握浏览器资源嗅探工具 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 你是否曾经在浏览网页时,…...

Windows激活终极指南:KMS_VL_ALL_AIO智能激活解决方案
Windows激活终极指南:KMS_VL_ALL_AIO智能激活解决方案 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows激活弹窗烦恼吗?每次重装系统后都要四处寻找激活工具…...