2025最新高维多目标优化:基于城市场景下无人机三维路径规划的导航变量的多目标粒子群优化算法(NMOPSO),MATLAB代码
一、基于导航变量的多目标粒子群优化算法(NMOPSO)介绍
基于导航变量的多目标粒子群优化算法(Navigation variable-based multi-objective particle swarm optimization,NMOPSO)是2025年提出的一种用于无人机路径规划的先进算法,旨在生成满足无人机运动学约束的帕累托最优路径。该算法通过将路径规划问题建模为一个多目标优化问题,并利用粒子群优化(PSO)技术来寻找最优解。NMOPSO 算法的核心在于引入导航变量来表示无人机的路径,从而更好地考虑无人机的运动学约束,并通过多目标优化方法生成一组非支配解,以满足不同的应用需求。
二、无人机路径规划问题
无人机路径规划问题的运动学模型、约束条件以及目标函数的定义如下:
2.1 运动学模型和约束


这些约束条件确保无人机在飞行过程中不会超出其物理能力范围,从而保证飞行的安全性和可行性。
2.2 路径规划的目标函数
无人机路径规划问题可以描述为在三维空间中找到一条从起点到终点的路径,该路径需要满足以下要求:
路径长度最短:减少飞行时间和能量消耗。
避免障碍物:确保飞行安全。
飞行高度稳定:减少能量消耗并提高飞行稳定性。
路径平滑:减少转向角度的变化,降低能量消耗。
这些要求可以通过以下四个目标函数来量化:
2.2.1 路径长度 (F1)
路径长度的目标函数 F1 用于衡量路径的总长度。路径长度越短,无人机的飞行效率越高。目标函数 F1 定义为:

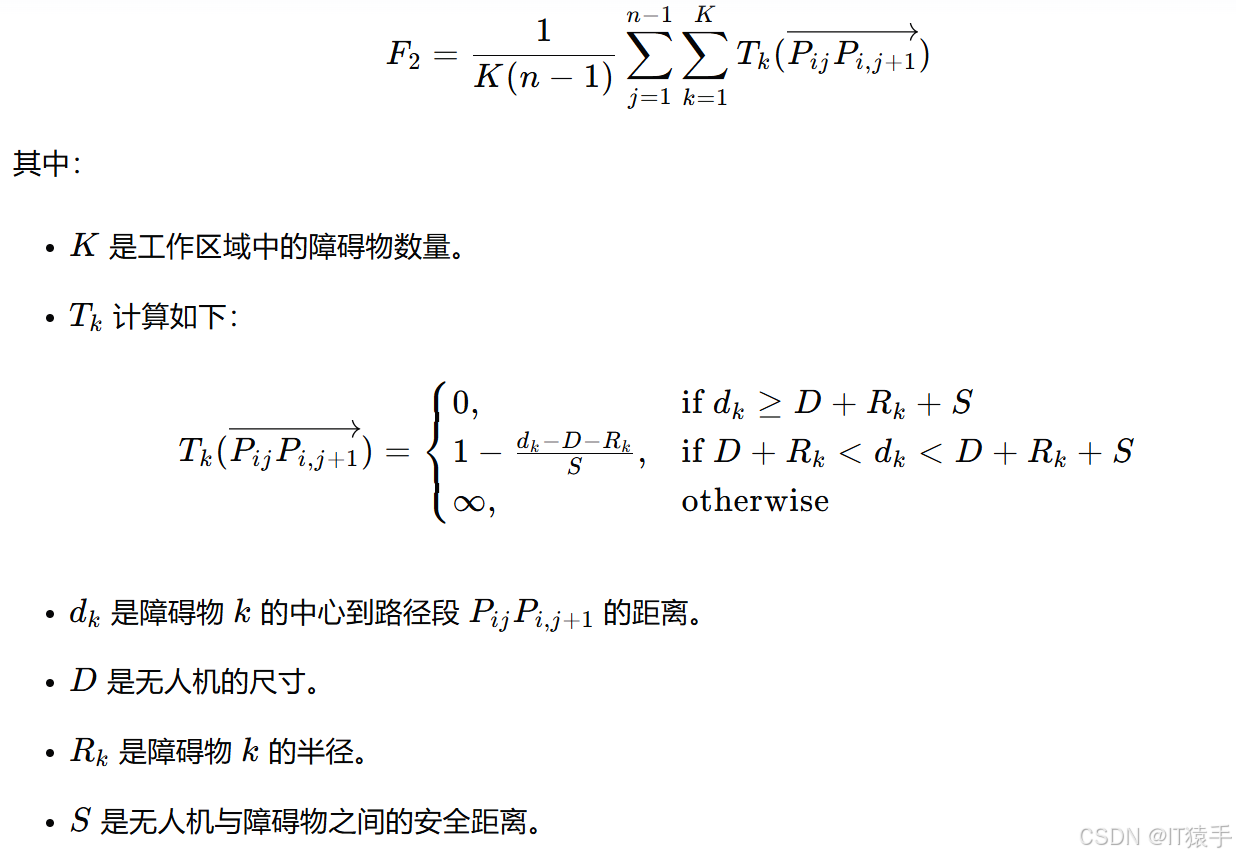
2.2.2 避碰 (F2)
避碰的目标函数 F2 用于确保无人机在飞行过程中避免与障碍物碰撞。目标函数 F2 定义为:

2.2.3 飞行高度 (F3)
飞行高度的目标函数 F3 用于确保无人机在飞行过程中保持稳定的飞行高度,以减少能量消耗。目标函数 F3 定义为:

2.2.4 平滑度 (F4)
平滑度的目标函数 F4 用于衡量无人机飞行路径的平滑程度,以减少转向角度的变化,从而降低能量消耗。目标函数 F4 定义为:

参考文献:
[1]Duong, Thi Thuy Ngan et al. “Navigation variable-based multi-objective particle swarm optimization for UAV path planning with kinematic constraints.” Neural Computing and Applications (2025): n. pag.
三、NMOPSO求解路径规划
由于上述目标函数之间可能存在冲突,因此采用多目标优化方法来寻找帕累托最优解。
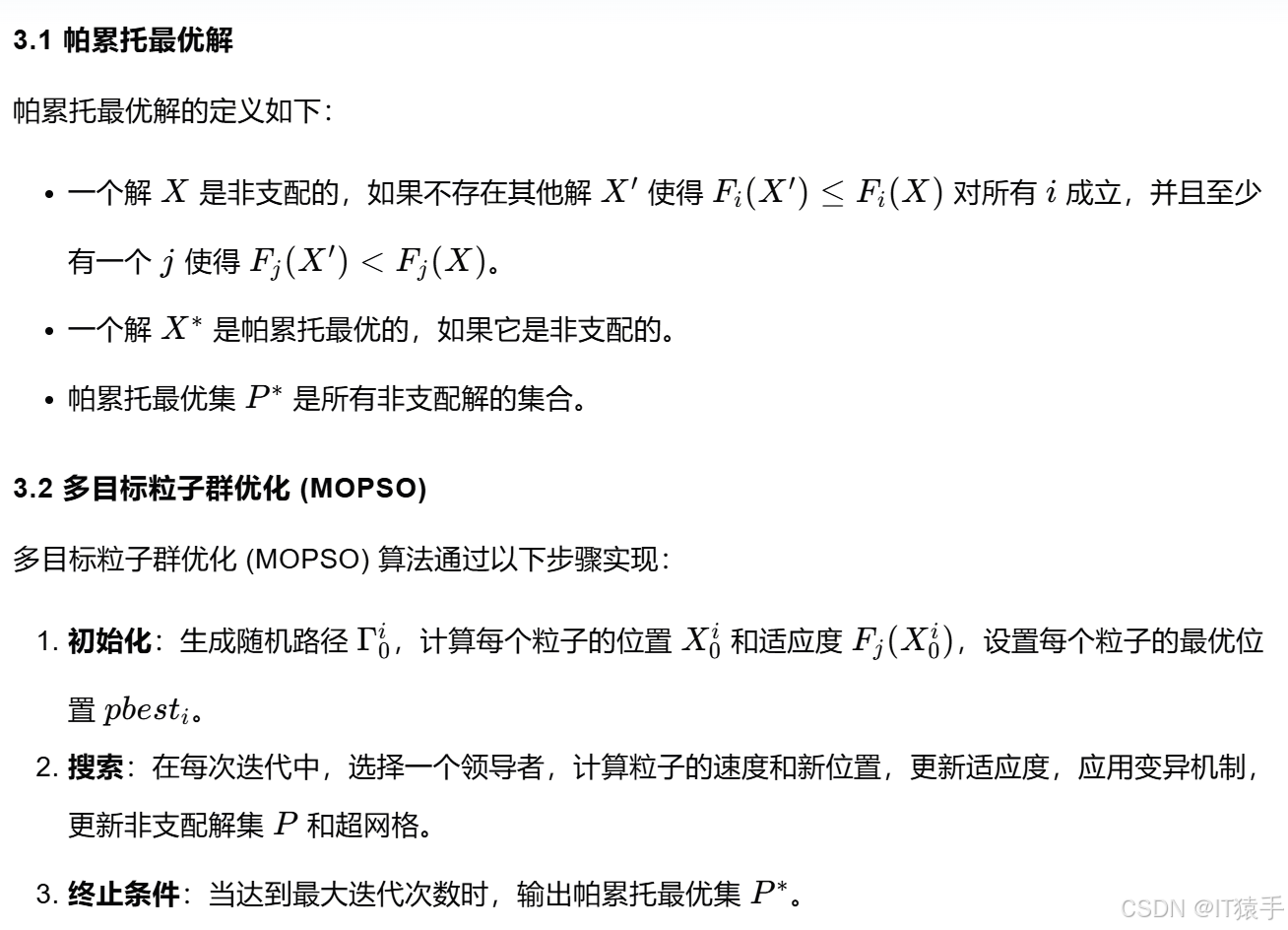
以下是基于导航变量的多目标粒子群优化算法(NMOPSO)的详细算法流程:
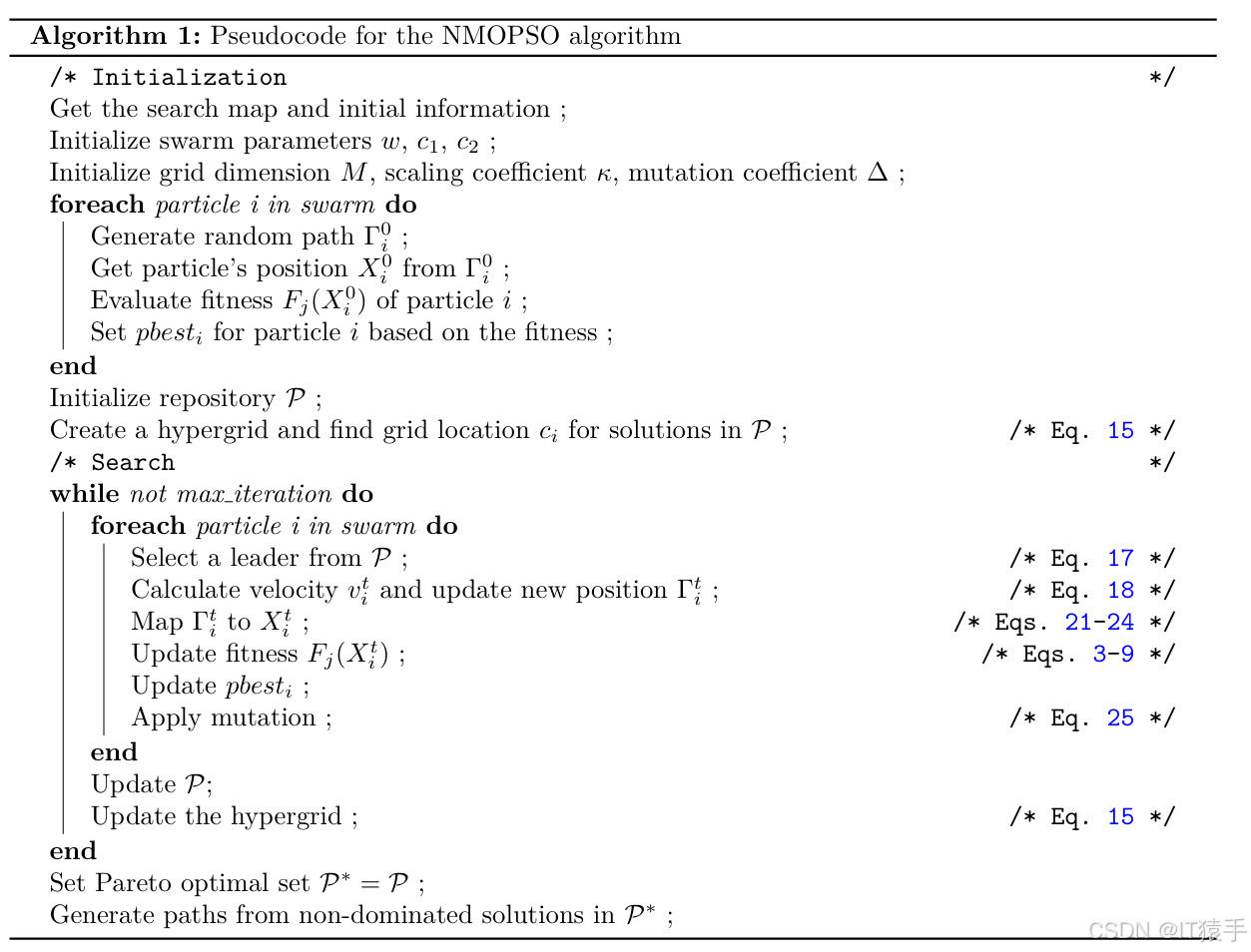
- 初始化
设置参数:确定粒子群的大小、最大迭代次数、惯性权重、学习因子等参数。
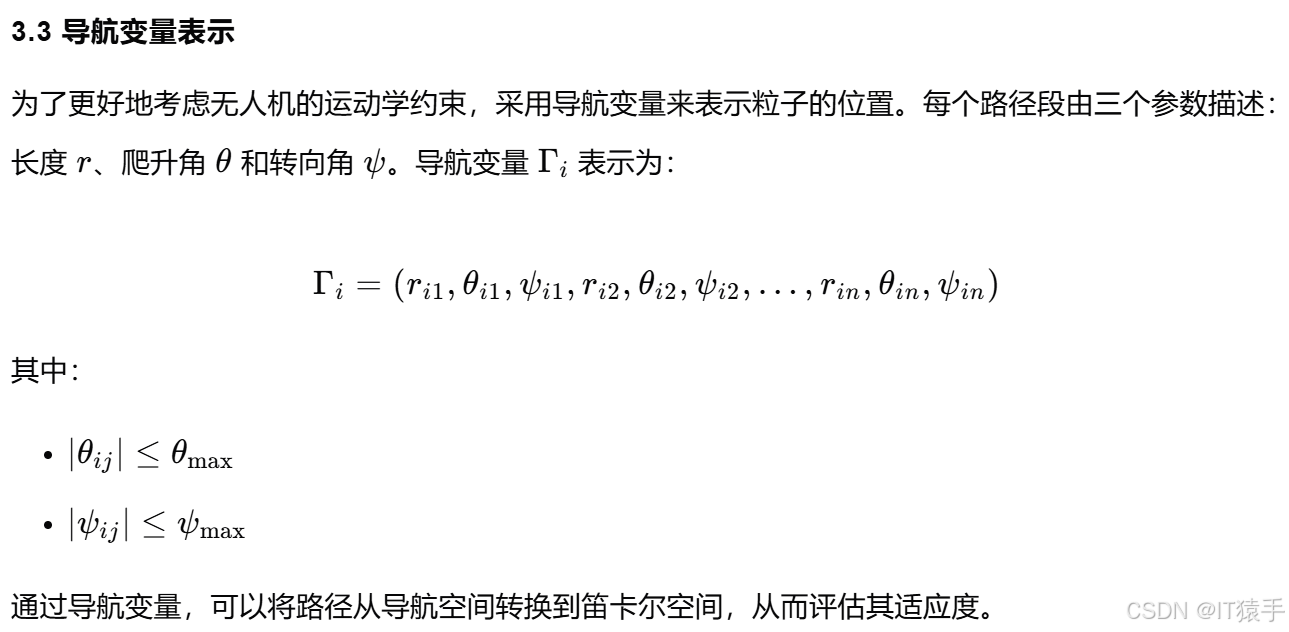
生成初始路径:随机生成一组路径,作为粒子群的初始位置。每个路径由导航变量表示,包括路径段的长度、爬升角和转向角。
初始化粒子的物理变量:为每个粒子初始化速度和位置,并根据约束条件进行调整。
计算适应度:根据目标函数 F1,F2,F3,F4 计算每个粒子当前路径的适应度。
初始化非支配解集 P:将初始粒子群中的非支配解加入非支配解集 P。
建立超网格:根据非支配解集 P 中各解的目标函数值,建立超网格,为后续的领导者选择做准备。 - 迭代更新
选择领导者:
遍历超网格,计算每个超立方体的拥挤度。
根据拥挤度随机选择一个领导者,作为粒子更新的参考点。
更新粒子的速度和位置:
根据粒子的当前位置、个人最好位置和领导者的位置,更新粒子的速度:

其中,w 是惯性权重,c1 和 c2 是学习因子,r1 和 r2 是随机数。
根据更新后的速度,更新粒子的位置:

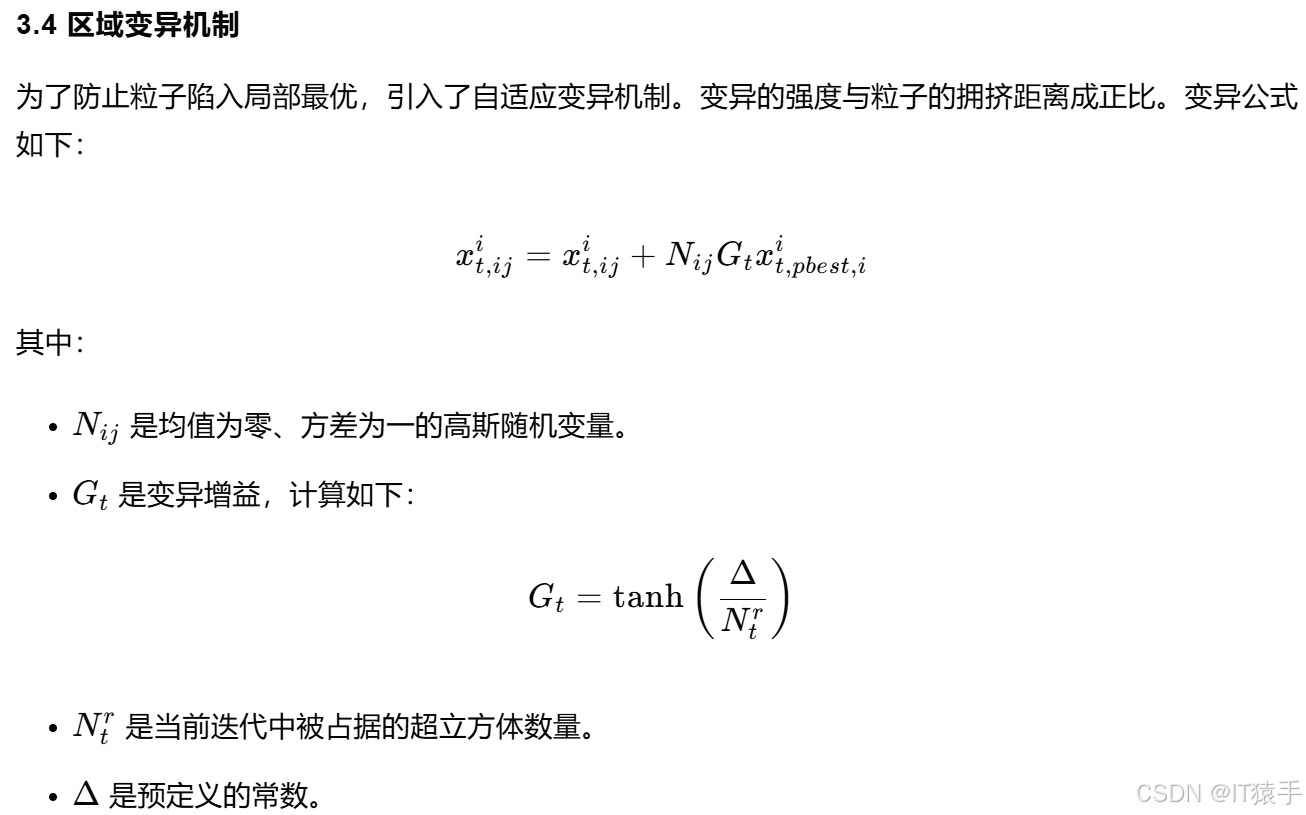
应用变异机制:
随机选择一个粒子的导航变量,按照区域变异机制进行变异:

其中,Nij 是服从正态分布的随机数,Gt 是变异增益。
评估新路径:
将变异后的导航变量转换为笛卡尔坐标,生成新的飞行路径。
根据目标函数 F1,F2,F3,F4 计算新路径的适应度。
更新非支配解集 P:
将新生成的路径加入非支配解集 P,并去除被支配的解。
根据需要进行剪枝操作,保持非支配解集的规模在合理范围内。
更新超网格:
根据更新后的非支配解集 P,重新建立超网格,为下一次迭代的领导者选择做准备。
终止条件判断:
如果达到最大迭代次数或满足其他终止条件,停止算法,输出非支配解集 P。
否则,继续进行下一次迭代。
3. 输出结果
生成帕累托最优路径:从非支配解集 P 中提取所有路径,作为帕累托最优解。
路径后处理:根据应用需求,对帕累托最优路径进行进一步筛选和优化,生成最终的飞行路径。
参考文献:
[1]Duong, Thi Thuy Ngan et al. “Navigation variable-based multi-objective particle swarm optimization for UAV path planning with kinematic constraints.” Neural Computing and Applications (2025): n. pag.
四、部分代码及部分结果
%% Problem Definition
model = CreateModel(); % Create search map and parameters
model_name = 6;nVar=model.n; % Number of Decision Variables = searching dimension of PSO = number of path nodesVarSize=[1 nVar]; % Size of Decision Variables Matrix% Lower and upper Bounds of particles (Variables)
VarMin.x=model.xmin;
VarMax.x=model.xmax;
VarMin.y=model.ymin;
VarMax.y=model.ymax;
VarMin.z=model.zmin;
VarMax.z=model.zmax; VarMax.r=3*norm(model.start-model.end)/nVar; % r is distance
VarMin.r=VarMax.r/9;% Inclination (elevation)
AngleRange = pi/4; % Limit the angle range for better solutions
VarMin.psi=-AngleRange;
VarMax.psi=AngleRange; % Azimuth
VarMin.phi=-AngleRange;
VarMax.phi=AngleRange; % Lower and upper Bounds of
alpha=0.5;
VelMax.r=alpha*(VarMax.r-VarMin.r);
VelMin.r=-VelMax.r;
VelMax.psi=alpha*(VarMax.psi-VarMin.psi);
VelMin.psi=-VelMax.psi;
VelMax.phi=alpha*(VarMax.phi-VarMin.phi);
VelMin.phi=-VelMax.phi;


五、完整MATLAB代码见下方名片
相关文章:
2025最新高维多目标优化:基于城市场景下无人机三维路径规划的导航变量的多目标粒子群优化算法(NMOPSO),MATLAB代码
一、基于导航变量的多目标粒子群优化算法(NMOPSO)介绍 基于导航变量的多目标粒子群优化算法(Navigation variable-based multi-objective particle swarm optimization,NMOPSO)是2025年提出的一种用于无人机路径规划的…...

数字IC后端设计实现OCC(On-chip Clock Controller)电路介绍及时钟树综合案例
数字IC后端时钟树综合专题(OCC电路案例分享) 复杂时钟设计时钟树综合(clock tree synthesis)常见20个典型案例 1、什么是OCC? 片上时钟控制器(On-chip Clock Controllers ,OCC),也称为扫描时钟控制器(Scan Clock Con…...

Linux内核,slub分配流程
我们根据上面的流程图,依次看下slub是如何分配的 首先从kmem_cache_cpu中分配,如果没有则从kmem_cache_cpu的partial链表分配,如果还没有则从kmem_cache_node中分配,如果kmem_cache_node中也没有,则需要向伙伴系统申请…...

本地部署DeepSeek-R1(Ollama+Docker+OpenWebUI知识库)
安装Ollama 打开 Ollama官网 https://ollama.com/下载安装 Ollama服务默认只允许本机访问,修改允许其它主机访问 OLLAMA_HOST0.0.0.0 ollama serve也可以添加系统环境变量 都知道模型体积很大,顺便也通过环境变量修改模型存放位置,我这…...

Java 实现快速排序算法:一条快速通道,分而治之
大家好,今天我们来聊聊快速排序(QuickSort)算法,这个经典的排序算法被广泛应用于各种需要高效排序的场景。作为一种分治法(Divide and Conquer)算法,快速排序的效率在平均情况下非常高ÿ…...

20250223下载并制作RTX2080Ti显卡的显存的测试工具mats
20250223下载并制作RTX2080Ti显卡的显存的测试工具mats 2025/2/23 23:23 缘起:我使用X99的主板,使用二手的RTX2080Ti显卡【显存22GB版本,准备学习AI的】 但是半年后发现看大码率的视频容易花屏,最初以为是WIN10经常更换显卡/来回更…...

element-ui的组件使用
1. 安装 Element UI(在文件夹最上面输入cmd进入dos窗口,然后输入安装指令 npm install element-ui --save) 2.在main.js文件全局引入(main.js文件负责 全局注册 ),在该文件注册的所有组件在其他文件都能直接调用,一般…...

医疗AI领域中GPU集群训练的关键技术与实践经验探究(上)
医疗AI领域中GPU集群训练的关键技术与实践经验探究(上) 一、引言 1.1 研究背景与意义 在科技飞速发展的当下,医疗 AI 作为人工智能技术与医疗领域深度融合的产物,正引领着医疗行业的深刻变革。近年来,医疗 AI 在疾病诊断、药物研发、健康管理等诸多方面取得了显著进展,…...

详解Redis淘汰策略
引言 Redis 是一个高性能的内存数据库,广泛应用于缓存系统、消息队列等场景。当 Redis 的内存达到限制时,需要根据一定的策略来淘汰数据,以便腾出空间给新数据。本文将深入解析 Redis 的内存淘汰机制,帮助更好地配置 Redis&#…...

HarmonyOS 5.0应用开发——鸿蒙接入高德地图实现POI搜索
【高心星出品】 文章目录 鸿蒙接入高德地图实现POI搜索运行结果:准备地图编写ArkUI布局来加载HTML地图 鸿蒙接入高德地图实现POI搜索 在当今数字化时代,地图应用已成为移动设备中不可或缺的一部分。随着鸿蒙系统的日益普及,如何在鸿蒙应用中…...

nginx关于配置SSL后启动失败原因分析
在配置SSL后,启动./nginx失败,报错提示如下: nginx: [emerg] the "ssl" parameter requires ngx_http_ssl_module in /usr/local/nginx-1.27.4/conf/nginx.conf:36 这个错误提示表在配置nginx启用SSL时,nginx未启用 ng…...

【自学嵌入式(9)ESP8266网络服务器的使用】
ESP8266网络服务器的使用 ESP8266WiFi 库① WiFiClass② WiFiClient③ WiFiServer④ WiFiUDP ESP8266WiFiMulti 库① WiFiMulti ESP8266WebServer 库① ESP8266WebServer 网络服务器实例在浏览器中控制ESP8266指示灯将开发板引脚状态显示在网页中 在之前的文章中,曾…...

危化品经营单位安全管理人员的职责及注意事项
危化品经营单位安全管理人员肩负着保障经营活动安全的重要责任,以下是其主要职责及注意事项: 职责 1. 安全制度建设与执行:负责组织制定本单位安全生产规章制度、操作规程和生产安全事故应急救援预案,确保这些制度符合国家相关法…...
(5))
项目实战--网页五子棋(匹配模块)(5)
上期我们实现了websocket后端的大部分代码,这期我们实现具体的匹配逻辑 1. 定义Mather类 我们新建一个Matcher类用来实现匹配逻辑 Component public class Matcher {//每个匹配队列代表不同的段位,这里约定每一千分为一个段位private ArrayList<Queue<User…...

mysql 迁移到人大金仓数据库
我是在windows上安装了客户端工具 运行数据库迁移工具 打开 在浏览器输入http://localhost:54523/ 账号密码都是kingbase 添加mysql源数据库连接 添加人大金仓目标数据库 添加好的两个数据库连接 新建迁移任务 选择数据库 全选 迁移中 如果整体迁移不过去可以单个单个或者几个…...

uniapp 网络请求封装(uni.request 与 uView-Plus)
一、背景 在开发项目中,需要经常与后端服务器进行交互;为了提高开发效率和代码维护性,以及降低重复性代码,便对网络请求进行封装统一管理。 二、创建环境文件 2.1、根目录新建utils文件夹,utils文件夹内新建env.js文…...

计算机网络与通讯知识总结
计算机网络与通讯知识总结 基础知识总结 1)FTP:文件传输 SSH:远程登录 HTTP:网址访问 2)交换机 定义:一种基于MAC地址实现局域网(LAN)内数据高速转发的网络设备,可为接入设备提供独享通信通道。 - 核心功能: 1.数据链路层(OSI第二层)工作,通过MAC地址…...

DPVS-2:单臂负载均衡测试
上一篇编译安装了DPVS,这一篇开启DPVS的负载均衡测试 : 单臂 FULL NAT模式 拓扑-单臂 单臂模式 DPVS 单独物理机 CLINET,和两个RS都是另一个物理机的虚拟机,它们网卡都绑定在一个桥上br0 , 二层互通。 启动DPVS …...

open webui 部署 以及解决,首屏加载缓慢,nginx反向代理访问404,WebSocket后端服务器链接失败等问题
项目地址:GitHub - open-webui/open-webui: User-friendly AI Interface (Supports Ollama, OpenAI API, ...) 选择了docker部署 如果 Ollama 在您的计算机上,请使用以下命令 docker run -d -p 3000:8080 --add-hosthost.docker.internal:host-gatewa…...

交通物联网:概念、历史、现状与展望
交通物联网:概念、历史、现状与展望 李升伟 李昱均 一、概念 交通物联网(Internet of Vehicles, IoV)是物联网(IoT)在交通领域的延伸,旨在通过信息传感设备,实现车、路、人、云之间的全方位连…...

终极窗口编辑神器:用SRWE打破Windows程序分辨率限制的完整指南
终极窗口编辑神器:用SRWE打破Windows程序分辨率限制的完整指南 【免费下载链接】SRWE Simple Runtime Window Editor 项目地址: https://gitcode.com/gh_mirrors/sr/SRWE 你是否曾因游戏截图分辨率不够高而失望?或者因应用程序窗口无法调整到理想…...

别再只会让电机转!用STM32和Proteus深度模拟28BYJ-48步进电机的加减速曲线与堵转检测
基于STM32的28BYJ-48步进电机高级控制:S形曲线与堵转检测实战 在嵌入式开发领域,步进电机控制常被视为入门级项目——接上驱动模块,写几行代码让电机转动似乎就大功告成。但当我们把场景切换到实际产品中,粗暴的启停控制和速度突变…...

DeepSeek-OCR-2应用案例:律所合同扫描件智能解析与条款结构化提取
DeepSeek-OCR-2应用案例:律所合同扫描件智能解析与条款结构化提取 1. 引言:律所文档处理的痛点与机遇 在律师事务所的日常工作中,合同文档处理是一个既重要又繁琐的环节。传统的合同处理方式往往面临三大挑战: 效率瓶颈&#x…...
)
告别手动挖洞:用Acunetix 13.0自动化扫描你的Pikachu靶场(附详细配置与报告解读)
从零到精通的Acunetix实战:Pikachu靶场自动化安全评估指南 在网络安全学习的过程中,靶场环境就像武术训练中的木人桩,而自动化扫描工具则是帮助我们快速发现弱点的"火眼金睛"。本文将带你深入探索如何将Acunetix这款专业级扫描工具…...

2026年户外广告机选购指南:揭秘五大优质供应商的硬核实力
在信息爆炸的今天,户外广告机已成为品牌触达消费者的关键媒介。无论是繁华商圈的商业展示,还是智慧城市的政务信息发布,一块稳定、高清、耐用的屏幕至关重要。面对市场上琳琅满目的品牌,如何选择一家靠谱的供应商?本文…...

别再手动查了!用Python脚本+UniProt API,5分钟批量搞定蛋白质结构域数据
蛋白质结构域数据自动化抓取实战:PythonUniProt API高效解决方案 1. 生物信息学研究的效率痛点 在实验室的深夜,李博士盯着屏幕上密密麻麻的UniProt ID列表叹了口气。作为研究锌指蛋白家族的专家,她需要为827个人类蛋白质收集结构域注释数据。…...

Flux Sea Studio 跨平台渲染方案:云端生成与本地预览的协同
Flux Sea Studio 跨平台渲染方案:云端生成与本地预览的协同 最近在折腾一些创意项目时,我遇到了一个挺普遍的问题:手头的设计工具,要么功能强大但只能在特定设备上跑,对硬件要求高得吓人;要么就是能跨平台…...

别再乱用Level 2!用STM32CubeProgrammer给STM32F4加密前必须知道的3个等级区别与后果
STM32F4加密策略:深入解析Level 0/1/2读保护等级的核心差异与工程实践 当你在产品量产前夜最后一次检查STM32CubeProgrammer的Option Bytes配置界面时,那个看似简单的RDP(Read Protection)下拉菜单里藏着可能决定产品生命周期的关…...

5分钟视频急救指南:使用untrunc无损修复损坏的MP4/MOV文件
5分钟视频急救指南:使用untrunc无损修复损坏的MP4/MOV文件 【免费下载链接】untrunc Restore a truncated mp4/mov. Improved version of ponchio/untrunc 项目地址: https://gitcode.com/gh_mirrors/un/untrunc 你是否经历过重要视频突然无法播放的绝望时刻…...

高性能开源PLC编程平台:OpenPLC Editor工业自动化开发完整解决方案
高性能开源PLC编程平台:OpenPLC Editor工业自动化开发完整解决方案 【免费下载链接】OpenPLC_Editor 项目地址: https://gitcode.com/gh_mirrors/ope/OpenPLC_Editor OpenPLC Editor作为一款基于PLCopen国际标准的开源工业自动化编程平台,为工业…...