python算法-用递归打印数字3的幂--Day017
文章目录
- 前言
- 采用创新方式,精选趣味、实用性强的例子,从不同难度、不同算法、不同类型和不同数据结构进行总结,全面提升算法能力。
- 例1.用递归打印数字
- 例2.相对排名
- 总结
前言
采用创新方式,精选趣味、实用性强的例子,从不同难度、不同算法、不同类型和不同数据结构进行总结,全面提升算法能力。
例1.用递归打印数字
用递归的方法找到从1到最大的n位整数
示例:给出1,返回[1,2,3,4,5,6,7,8,9]
代码如下(示例):
class Soult:def sol(self,n):ret = pow(10,n)#采用内置函数pow(x,y),返回x的y次方,得出更多数字res = []for i in range(1,ret):res.append(i)return res
if __name__ == '__main__':ss = Soult()n = int(input("请输入数字:"))a = ss.sol(n)print(a)
输入:2
得到的结果:[1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50, 51, 52, 53, 54, 55, 56, 57, 58, 59, 60, 61, 62, 63, 64, 65, 66, 67, 68, 69, 70, 71, 72, 73, 74, 75, 76, 77, 78, 79, 80, 81, 82, 83, 84, 85, 86, 87, 88, 89, 90, 91, 92, 93, 94, 95, 96, 97, 98, 99]
例2.相对排名
给定一个整数,判断该整数是否为3的幂
示例,输入n = 9,则返回True
代码如下(示例):
class Solut:def sol(self,n):n1 = abs(n)n2 = 1while n2 <= n1:#这是一个循环,它会持续执行直到 `n2` 大于 `n1`。在每次迭代中,我们都会检查 `n2` 是否是 `n1` 的因子if n2 == n1:#判断当前迭代的 `n2` 值与 `n1` 相同return Truen2 *= 3return False
if __name__ == '__main__':ss = Solut()n = 9x = ss.sol(n)print(x)
得到的结果:True
总结
Python有个内置函数pow(x, y, z)返回x的y次方,如果有第三个参数,则求完幂次后对第三个数取余。
1.计算10的2次方
a = pow(10, 2) # 10的2次幂
print(a) # 100
2.计算5的三次方并取模3
b = pow(5, 3, 3)
print(b) # 2
3.计算10的负2次方,即计算1/10的平方
c = pow(10, -2)
print(c) # 0.01
相关文章:

python算法-用递归打印数字3的幂--Day017
文章目录 前言采用创新方式,精选趣味、实用性强的例子,从不同难度、不同算法、不同类型和不同数据结构进行总结,全面提升算法能力。例1.用递归打印数字例2.相对排名 总结 前言 采用创新方式,精选趣味、实用性强的例子,…...

Selenium 与 Coze 集成
涵盖两者的基本概念、集成步骤、代码示例以及相关注意事项。 基本概念 Selenium:是一个用于自动化浏览器操作的工具集,支持多种浏览器(如 Chrome、Firefox 等),能够模拟用户在浏览器中的各种操作,如点击、输入文本、选择下拉框等,常用于 Web 应用的自动化测试。Coze:它…...

AWS CLI将读取器实例添加到Amazon Aurora集群
Amazon Aurora是AWS提供的一种兼容MySQL和PostgreSQL的关系数据库服务。Aurora集群由一个写入器实例和多个读取器实例组成,可以提供高可用性、高性能和可扩展性。在本文中,我们将介绍如何使用AWS命令行界面(CLI)将读取器实例添加到现有的Aurora集群中。 © ivwdcwso (ID: u…...

NTS库学习,找bug中......
基础知识 Coordinate: 表示一个二维坐标点,包括 X 和 Y 坐标值。 CoordinateSequence: 由一系列 Coordinate 对象组成的序列,可以表示线、多边形等几何对象的顶点。 CoordinateFilter: 用于对几何对象的坐标进行过滤或修改的接口。 Geometry: 表示一个几…...

五十天精通硬件设计第40天-硬件测试流程
目录 一、硬件测试流程概述 二、详细测试流程 1. 需求分析与测试计划 2. 测试环境搭建 3. 测试执行 3.1 基本功能测试 3.2 性能测试 3.3 环境与可靠性测试 3.4 安全与合规性测试 4. 问题分析与调试 5. 回归测试与报告输出 三、关键注意事项 四、常见问题与解决 五…...

R语言安装教程(附安装包)R语言4.3.2版本安装教程
文章目录 前言一、安装包下载二、R-4.3.2安装步骤三、rtools43安装步骤四、RStudio安装步骤 前言 本教程将详细、全面地为你介绍在 Windows 系统下安装 R 语言 4.3.2 的具体步骤。无论你是初涉数据领域的新手,还是希望更新知识体系的专业人士,只要按照本…...

数据库 安装initializing database不通过
出现一下情况时: 处理方法: 将自己的电脑名称 中文改成英文 即可通过...

自动驾驶两个传感器之间的坐标系转换
有两种方式可以实现两个坐标系的转换。 车身坐标系下一个点p_car,需要转换到相机坐标系下,旋转矩阵R_car2Cam,平移矩阵T_car2Cam。点p_car在相机坐标系下记p_cam. 方法1:先旋转再平移 p_cam T_car2Cam * p_car T_car2Cam 需要注…...
)
信号——进程间通信(20250225)
1. 信号 管道:进程间数据通信(同步通信) 信号:进程间通信,用来发送通知(异步通信,中断) 1)同步通信:发送端和接收端,使用同一时钟通信 异步通信:发送端和接收端使用不同时钟通信 …...
transformer架构嵌入层位置编码之动态NTK-aware位置编码
前文,我们已经构建了一个小型的字符级语言模型,是在transformer架构基础上实现的最基本的模型,我们肯定是希望对该模型进行改进和完善的。所以我们的另外一篇文章也从数据预处理、模型架构、训练策略、评估方法、代码结构、错误处理、性能优化等多个方面提出具体的改进点,但…...

东信营销科技巨额补贴仍由盈转亏:毛利率大幅下滑,现金流告急
《港湾商业观察》施子夫 近期,东信营销科技有限公司(以下简称,东信营销科技)递表港交所,联席保荐机构为海通国际和中银国际。 东信营销科技的国内运营主体为深圳市东信时代信息技术有限公司。尽管期内收入规模有所提…...

[电感、磁珠、0欧姆电阻]的区别与应用特性
1. 电感(Inductor) 基础特性: 储能元件:通过磁场存储能量,阻碍电流突变()。 核心参数:电感值(L)、额定电流、直流电阻(DCR)、自谐振频率(SRF)。 频率特性:感抗 ,(通直流、阻交流),低频时阻抗低,高频时阻抗高(但受SRF限制)。 电路符号及实物:多为绕线结…...

车载诊断架构 --- LIN节点路由转发注意事项
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 简单,单纯,喜欢独处,独来独往,不易合同频过着接地气的生活,除了生存温饱问题之外,没有什么过多的欲望,表面看起来很高冷,内心热情,如果你身…...

前端 AJAX 二、AJAX使用
环境准备: 使用AJAX技术我们需要用到HTML/CSS/JS/jQuery/JavaWeb相关知识,原生的JS也可以进行AJAX的操作,但是相对比较繁琐也没有必要,故此我们使用jQuery封装后的AJAX技术来进行学习; 创建AJAX请求 $.ajax({url : "ajax/getName?id"id,// ajax请求的…...

Windows - 通过ssh打开带有图形界面的程序 - 一种通过计划任务的曲折实现方式
Windows(奇思妙想) - 通过ssh打开带有图形界面的程序 - 一种通过计划任务的曲折实现方式 前言 Windows启用OpenSSH客户端后就可以通过SSH的方式访问Windows了。但是通过SSH启动的程序: 无法显示图形界面会随着SSH进程的结束而结束 于是想到了一种通过执行“计划…...
Android ViewStub延迟初始化加载布局View,Kotlin
Android ViewStub延迟初始化加载布局View,Kotlin activity_my.xml: <?xml version"1.0" encoding"utf-8"?> <LinearLayout xmlns:android"http://schemas.android.com/apk/res/android"android:layout_width"match_…...
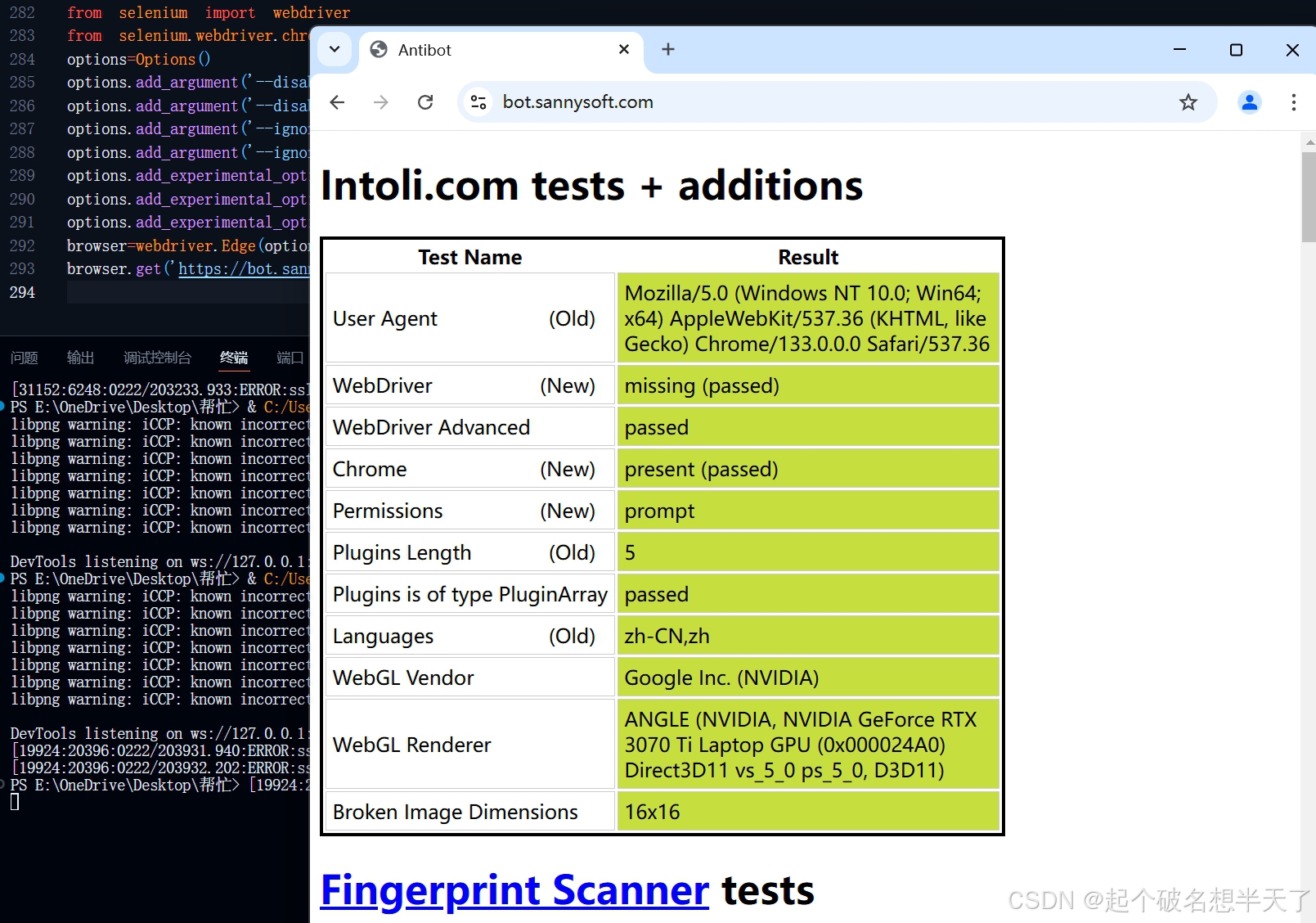
Web自动化之Selenium下Chrome与Edge的Webdriver常用Options参数
目录 引言 说明 Add_argument() 添加方式 常用参数 Add_experimental_option() 添加方式 常用方法 任务结束后仍然保持浏览器打开 禁用“Chrome 正受到自动测试软件的控制”提示 设置下载路径 禁用弹窗拦截 禁用图片加载 禁用 JavaScript 注意 引言 …...
深度解析)
数据安全_笔记系列05:数据合规与隐私保护(GDPR、CCPA、中国《数据安全法》)深度解析
数据安全_笔记系列05:数据合规与隐私保护(GDPR、CCPA、中国《数据安全法》)深度解析 在全球数据跨境流动和隐私保护强监管的背景下,企业需同时满足多法域合规要求。以下从 法规要点、核心差异、实施策略、跨境传输、典型案例 等维…...

AF3 DataPipeline类process_multiseq_fasta 方法解读
AlphaFold3 data_pipeline 模块DataPipeline类的 process_multiseq_fasta 方法用于处理多序列 FASTA 文件,生成 AlphaFold3 结构预测所需的特征,适用于多链复合物的预测。它结合了 Minkyung Baek 在 Twitter 上提出的“AlphaFold-Gap”策略,即通过在多链 MSA 中插入固定长度…...

中国的Cursor! 字节跳动推出Trae,开放Windows版(附资源),开发自己的网站,内置 GPT-4o 强大Al模型!
Trae是什么 Trae 是字节跳动推出的免费 AI IDE,通过 AI 技术提升开发效率。支持中文,集成了 Claude 3.5 和 GPT-4 等主流 AI 模型,完全免费使用。Trae 的主要功能包括 Builder 模式和 Chat 模式,其中 Builder 模式可帮助开发者从…...

多模态大模型端侧落地难?揭秘TensorRT-LLM+ONNX Runtime双引擎协同部署的7个关键阈值指标
第一章:多模态大模型端侧部署方案 2026奇点智能技术大会(https://ml-summit.org) 端侧部署多模态大模型面临算力受限、内存紧张、功耗敏感与实时性要求高等多重挑战。当前主流路径聚焦于模型轻量化、推理引擎适配与硬件协同优化三大方向,兼顾语义理解、…...

数组arr
一.概念[必须是常量值] 1.概念2.一维数组的创及其初始化(怎么定义数组) 2.1数组创建2.2数组初始化2.2数组类型(去掉数组名)3.一维数组的使用 3.1数组下标(从0开始)3.2如何打印目标数组元素3.3如何打印数组所…...

左摆动杠杆的加工工艺规程及铣宽度8mm槽夹具设计
左摆动杠杆作为机械传动系统中的关键零件,其加工质量直接影响设备运行的稳定性。制定科学的加工工艺规程,需从材料特性、结构特征及加工精度三方面综合考量。通常选用高强度合金钢作为毛坯,经锻造消除内部缺陷后,通过粗车、精车完…...

CasRel模型镜像免配置亮点:预置中文分词器+标点标准化模块
CasRel模型镜像免配置亮点:预置中文分词器标点标准化模块 你是不是也遇到过这种情况?好不容易找到一个强大的关系抽取模型,比如CasRel,兴致勃勃地部署好,准备从中文文本里提取“谁-做了什么-对谁”这样的关键信息。结…...

基于无锚框机制改进YOLOv5的候选框生成:从原理到完整代码实现
摘要 YOLOv5作为目标检测领域的经典算法,其基于锚框(Anchor Box)的候选框生成机制虽然在多数场景下表现优异,但存在超参数敏感、泛化能力受限等固有问题。本文提出一种基于无锚框(Anchor-Free)机制改进YOLOv5候选框生成的方法,通过引入中心点预测与尺度回归分支,彻底摆脱对…...
)
银河麒麟V10 SP1上编译Qt5.15.10,我踩过的那些依赖包的坑(保姆级避坑指南)
银河麒麟V10 SP1编译Qt5.15.10:深度解析依赖包陷阱与实战排错指南 当你在银河麒麟V10 SP1系统上尝试编译Qt5.15.10时,是否经历过这样的场景:满怀信心地执行./configure命令,却在几分钟后看到满屏红色错误提示?作为一款…...

uniapp中uview组件库的NoticeBar滚动通知进阶配置与实战技巧
1. NoticeBar组件核心功能解析 滚动通知栏作为移动端高频使用的UI组件,在uniapp生态中通过uView的NoticeBar实现了开箱即用的解决方案。这个看似简单的组件实际上隐藏着不少值得深挖的特性。先说说它的基础能力:支持水平和垂直两种滚动模式,水…...

从入门到精通:Java 编程语言全解析 —— 夯实编程基础,开启开发之旅
从入门到精通:Java 编程语言全解析 —— 夯实编程基础,开启开发之旅 在编程世界里,Java 凭借其跨平台、安全稳定、生态完善的优势,稳居主流编程语言榜首数十年。无论是桌面应用、后端开发、移动安卓程序,还是大数据、云…...

高性能计算中的Apptainer_Singularity容器技术解析
1. 高性能计算为什么需要专属容器技术 第一次接触高性能计算集群时,我被复杂的软件依赖搞到崩溃。生物信息学的同事需要运行一个基因测序工具,但系统缺少某个特定版本的库文件;隔壁物理系的同学编译流体仿真程序时,又和现有环境冲…...

全文降AI的好处对比:嘎嘎降AI、比话降AI、率零三款横评
全文降AI的好处对比:嘎嘎降AI、比话降AI、率零三款横评 论文写完了,检测了一下AI率,38%。 这个数字说高不高说低不低,但大多数学校的标准是20%以下,有些严格的甚至要求15%。你得想办法把它降下来。 现在市面上的降AI工…...