ROS2-话题学习
强烈推荐教程:
《ROS 2机器人开发从入门到实践》3.2.2订阅小说并合成语音_哔哩哔哩_bilibili
构建功能包
# create package demo_python_pkg
ros2 pkg create --build-type ament_python --license Apache-2.0 demo_python_pkg
自己写的代码放在./demo_python_pkg/demo_python_pkg目录下
发布者
import rclpy
from rclpy.node import Node
import requests
from example_interfaces.msg import String
from queue import Queueclass NovelPubNode(Node):def __init__(self, node_name):super().__init__(node_name)self.novels_queue = Queue()self.get_logger().info("NovelPubNode has been started")self.novel_pub = self.create_publisher(String, "novel_topic", 10)self.timer = self.create_timer(5,self.timer_callback)def timer_callback(self):if not self.novels_queue.empty():line = self.novels_queue.get()msg = String()msg.data = lineself.novel_pub.publish(msg)self.get_logger().info(f"Published novel: {line}") def download_novel(self, url):response = requests.get(url)response.encoding = 'utf-8'text = response.textfor text_line in text.splitlines():self.novels_queue.put(text_line)self.get_logger().info(f"Downloaded novel: {text}")def main():rclpy.init()node = NovelPubNode("novel_pub_node")node.download_novel("http://0.0.0.0:8000/novel_1.txt")rclpy.spin(node)node.shutdown()
订阅者
import time
import espeakng
import rclpy
from rclpy.node import Node
from example_interfaces.msg import String
from queue import Queue
import threadingclass NovelSubNode(Node):def __init__(self, node_name):super().__init__(node_name)self.get_logger().info("NovelSubNode has been created!")self.novels_queue = Queue()self.create_subscription(String, "novel_topic", self.novel_callback, 10)self.say_thread = threading.Thread(target=self.say)self.say_thread.start()def novel_callback(self, msg):self.novels_queue.put(msg.data)def say(self):engine = espeakng.Speaker()engine.voice = "zh"while rclpy.ok():if not self.novels_queue.empty():novel = self.novels_queue.get()engine.say(novel)print("Said: " + novel)engine.wait()else:time.sleep(1)def main():rclpy.init()node = NovelSubNode("novel_sub_node")rclpy.spin(node)rclpy.shutdown()代码完成后,配置setup.py文件

格式为:"名字 = 包名.文件名:函数名"
在根目录运行以下终端命令
# build package demo_python_pkg
colcon build
# source setup.bash
source install/setup.bash
运行以上命令后,得到build、install、log文件夹
可执行的节点文件在以下文件夹
./install/demo_python_pkg/lib/demo_python_pkg
运行节点命令
ros2 run demo_python_pkg python_pub_node
ros2 run demo_python_pkg python_sub_node
其他常用命令
# check if node is running
ros2 node list
# check if topic is published
ros2 topic list
# check topic content
ros2 topic echo /novel_topic
# check topic speed
ros2 topic hz /novel_topic
# check if service is available
ros2 service list
相关文章:
ROS2-话题学习
强烈推荐教程: 《ROS 2机器人开发从入门到实践》3.2.2订阅小说并合成语音_哔哩哔哩_bilibili 构建功能包 # create package demo_python_pkg ros2 pkg create --build-type ament_python --license Apache-2.0 demo_python_pkg 自己写的代码放在./demo_python_pkg/…...

C++指针的基本认识
1.数组做函数参数 首先,所有传递给函数的参数都是通过传值方式进行的,传递给函数的都是参数的一份拷贝。 接着,当传递的参数是一个指向某个变量的指针时,函数将对该指针执行间接访问操作(拷贝指针,并访问所指向的内容),则函数就可以修改指向的变量。 2.一维数组 数组名…...

TypeScript系列06-模块系统与命名空间
1. ES 模块与 CommonJS 互操作性 1.1 模块解析策略 TypeScript 提供多种模块解析策略,每种策略针对不同的运行环境和开发场景优化: // tsconfig.json {"compilerOptions": {"moduleResolution": "node16", // 或 "…...
命令详解:zip)
Linux(Centos 7.6)命令详解:zip
1.命令作用 打包和压缩(存档)文件(package and compress (archive) files);该程序用于打包一组文件进行分发;存档文件;通过临时压缩未使用的文件或目录来节省磁盘空间;且压缩文件可以在Linux、Windows 和 macOS中轻松提取。 2.命…...
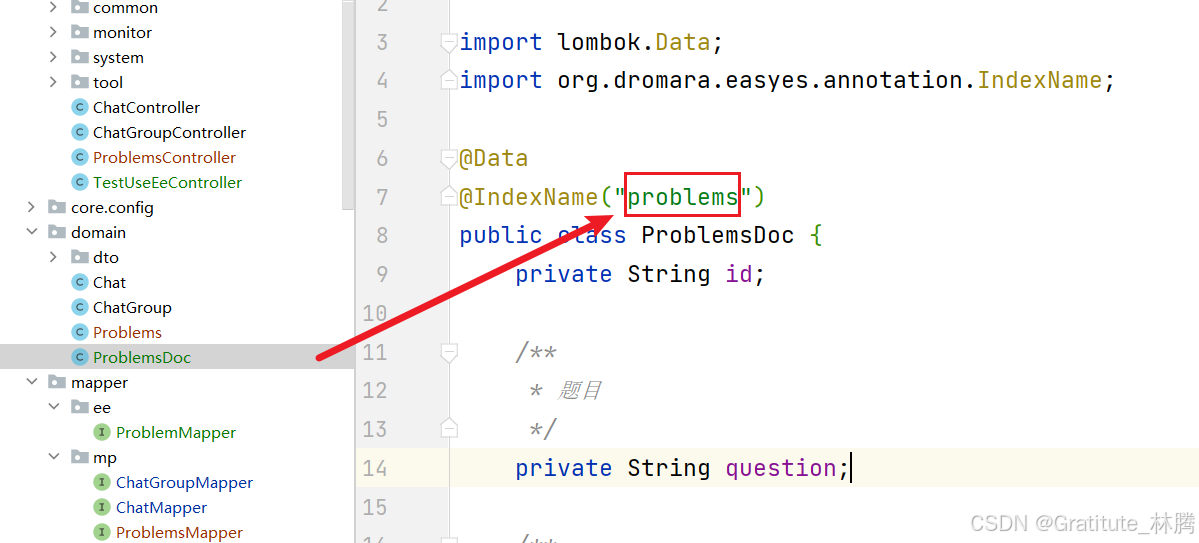
es-使用easy-es时如何指定索引库
在对应的实体类中,通过注解IndexName指定。 如上图,指定的索引库就是problems,那么之后我使用easy-es时都是针对该索引库进行增删改查。...

Redis-主从架构
主从架构 主从架构什么是主从架构基本架构 复制机制的工作原理1. 全量复制(Full Synchronization)2. 部分复制(Partial Synchronization)3. PSYNC2机制(Redis 4.0) 主从架构的关键技术细节1. 复制积压缓冲区…...

Java数据结构第二十期:解构排序算法的艺术与科学(二)
专栏:Java数据结构秘籍 个人主页:手握风云 目录 一、常见排序算法的实现 1.1. 直接选择排序 1.2. 堆排序 1.3. 冒泡排序 1.4. 快速排序 一、常见排序算法的实现 1.1. 直接选择排序 每⼀次从待排序的数据元素中选出最小的⼀个元素,存放在…...
inkscape裁剪svg
参考https://blog.csdn.net/qq_46049113/article/details/123824888,但是上个博主没有图片,不太直观,我补上。 使用inkscape打开需要编辑的图片。 在左边导航栏,点击矩形工具,创建一个矩形包围你想要保留的内容。 如果…...

类加载器加载过程
今天我们就来深入了解一下Java中的类加载器以及它的加载过程。 一、什么是类加载器? 在Java中,类加载器(Class Loader)是一个非常重要的概念。它负责将类的字节码文件(.class文件)加载到Java虚拟机&#x…...

Git基础之基本操作
文件的四种状态 Untracked:未追踪,如新建的文件,在文件夹中,没有添加到git库,不参与版本控制,通过git add将状态变为staged Unmodify:文件已入库,未修改,即版本库中的文件…...

简单的 Python 示例,用于生成电影解说视频的第一人称独白解说文案
以下是一个简单的 Python 示例,用于生成电影解说视频的第一人称独白解说文案。这个示例使用了 OpenAI 的 GPT 模型,因为它在自然语言生成方面表现出色。 实现思路 安装必要的库:使用 openai 库与 OpenAI API 进行交互。设置 API 密钥&#…...

[Pycharm]创建解释器
仅以此文章来记录自己经常脑子抽忘记的地方 有时候我们在建好了一个项目以后,想要更换解释器。以新建conda解释器为例。 一、conda解释器 1.选择setting 2.选择Add Local Interpreter 3.type选则conda。如果你之前已经有了conda环境,和我一样选择了Gen…...

在 k8s中查看最大 CPU 和内存的极限
在 Kubernetes(k8s)中,你可以从不同层面查看最大 CPU 和内存的极限,下面为你详细介绍从节点和集群层面查看的方法。 查看节点的 CPU 和内存极限 节点的 CPU 和内存极限是指单个节点上可分配的最大资源量,可通过以下几…...

【Python】为什么要写__init__.py
文章目录 PackageA(__init__特性)应该往__init__.py里放什么东西?1、包的初始化2、管理包的公共接口3、包的信息 正常我们直接导入就可以执行,但是在package的时候,有一种__init__.py的特殊存在 引入moduleA.py,执行main.py&…...

【IPFS应用开发】IPFS播放器-上传助手
本系列文章是针对 https://blog.csdn.net/weixin_43668031/article/details/83962959 内容的实现所编写的。开发经历包括思考过程、重构和推翻重来。 基于IPFS的视频播上传助手发布 起源一、优势:二、劣势:三、未来展望:上传助手Demo版本发布公告欢迎体验!立即体验:http:/…...

单细胞多数据集整合和去除批次效应教程,代做各领域生信分析
单细胞多数据集整合和去除批次效应教程 每个数据集的数据分别单独进行读取单细胞数据构建Seurat分析对象 读取各种来源的单细胞数据构建Seurat分析对象的教程 做这一步的时候可以查看我这篇写的非常详细的教程文章: 【腾讯文档】单细胞分析步骤1读取各种来源格式…...
)
Windows控制台函数:移动光标位置函数SetConsoleCursorPosition()
目录 什么是 SetConsoleCursorPosition? 它长什么样? 什么是 COORD? 怎么用它? 它有什么用? 跟 C 标准库有什么不一样? 注意事项 再试一个有趣的例子 什么是 SetConsoleCursorPosition?…...

MyBatis-Plus 注解大全
精心整理了最新的面试资料和简历模板,有需要的可以自行获取 点击前往百度网盘获取 点击前往夸克网盘获取 MyBatis-Plus 注解大全 MyBatis-Plus 是基于 MyBatis 的增强工具,通过注解简化了单表 CRUD 操作和复杂查询的配置。以下是常用注解的分类及详细说…...

Redis基础之基础概念
NoSQL数据库的优点 1.直接减少CPU与IO压力,是直接通过内存来读取的 2.可以直接作为缓存使用,减少IO操作 如果我们在请求中需要来传递数据,使用NoSQL可以来进行数据的直接存储和读取,从而来减少CPU与IO压力 或者是如果一些数据较为…...

Django小白级开发入门
1、Django概述 Django是一个开放源代码的Web应用框架,由Python写成。采用了MTV的框架模式,即模型M,视图V和模版T。 Django 框架的核心组件有: 用于创建模型的对象关系映射为最终用户设计较好的管理界面URL 设计设计者友好的模板…...

抖音数字资产管理方法论:构建个人内容沉淀系统的技术实践
抖音数字资产管理方法论:构建个人内容沉淀系统的技术实践 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback su…...

别再让模型在Unity里‘抽风’了!Blender导出FBX到Unity的7步避坑自查清单
别再让模型在Unity里‘抽风’了!Blender导出FBX到Unity的7步避坑自查清单当你花了三天三夜精心雕琢的Blender模型,导入Unity后却变成了一团旋转错乱、贴图闪烁的"抽象艺术",那种崩溃感每个3D开发者都懂。本文将用实战经验帮你建立一…...

Kerberos身份认证原理与企业级排错实战指南
1. 这不是“另一个登录框”,而是一套精密运转的身份验证齿轮系统很多人第一次听说 Kerberos,是在公司内网登录邮箱或访问内部系统时,看到那个带小盾牌图标的弹窗——“正在使用 Kerberos 协议进行身份验证”。于是下意识觉得:“哦…...

百考通智能任务书:贴合你的选题,拒绝空话假大空
毕业设计任务书是高校教学管理中的关键环节,它不仅标志着研究工作的正式启动,更是后续开题、实施、论文撰写和答辩全过程的行动依据。然而,许多学生在撰写时常常因不熟悉本专业写作规范、技术表达能力有限,或缺乏权威模板参考而陷…...

App Inventor蓝牙调试避坑指南:从连接失败到数据乱码,一次讲清所有常见问题
App Inventor蓝牙调试避坑指南:从连接失败到数据乱码的实战解决方案在移动应用开发领域,蓝牙通信一直是实现设备间短距离数据交换的核心技术之一。对于使用App Inventor的开发者而言,蓝牙模块提供了无需复杂编码即可实现无线通信的便捷途径。…...

echarts中heatmap鼠标滚动禁用缩放,向下滚动
配置如下效果如下...

Unity渲染排序三要素:SortingLayer、Order in Layer与RenderQueue协同原理
1. 为什么刚进Unity的美术和程序总在“图层遮挡”上反复拉扯?“这个UI怎么被背景挡住了?”“粒子特效一开就穿模,明明Z轴没问题!”“我调了Order in Layer到999,还是被另一个Sprite挡住——它连Sorting Layer都没改过&…...

应对Claude Code访问不稳定,快速切换至Taotoken的应急方案
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 应对Claude Code访问不稳定,快速切换至Taotoken的应急方案 对于依赖Claude Code进行日常开发或自动化任务的用户来说&a…...

从脚本到系统:设计一个支持插件、限流、重试与监控的 Python 异步爬虫框架
从脚本到系统:设计一个支持插件、限流、重试与监控的 Python 异步爬虫框架 很多人第一次写 Python 爬虫,都是从几十行脚本开始的:requests.get()、BeautifulSoup、for 循环、保存 CSV。它很快,也很有成就感。但真实项目往往不是“…...

从B站缓存困境到MP4自由:m4s-converter完整解决方案
从B站缓存困境到MP4自由:m4s-converter完整解决方案 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 当B站视频突然下架,那…...