火箭参数相关知识
火箭参数相关
前言:学习笔记,很初级部分内容来之相关书籍,入门学习,欢迎指正
1 坐标系右手定则:
伸开手掌,大拇指指向X轴,四指指向Y轴,四指弯曲90°后所指向的方向为Z轴。X 、Y、Z并没有约定产生的顺序,所以实际应用你也可能知道X 轴、Z轴来确定Y轴方向。
2 火箭转序:
使用的321转序,即箭体坐标系的Z->Y->X也就是俯仰、偏航、滚动转序
3 太阳同步轨道:
通俗点就是太阳光线和卫星轨道面的夹角始终为固定角度的轨道,运算上就是使卫星由于地球非圆形导致的卫星轨道面自转的角速度等于地球绕太阳公转的角速度,从而使得太阳光线和卫星轨道面的夹角始终保持一致。可见个人文档《太阳同步轨道学习笔记》。
4 火箭发射相关的坐标系:
3.1 发射系(发射坐标系):
O点为发射点,Y轴为发射点铅垂线(重力方向)的反方向为正Y,X轴为发射瞄准方向(是发射的目标方向所在面且与Y轴垂直的方向),Z轴与X Y遵循右手定则。其中,X轴与正北向的夹角叫做方位角(方位角是以发射时刻判定的未考虑地球自转的方位)。(由于地球不是正圆,所以Y轴的铅垂线方向并不指向地心)。
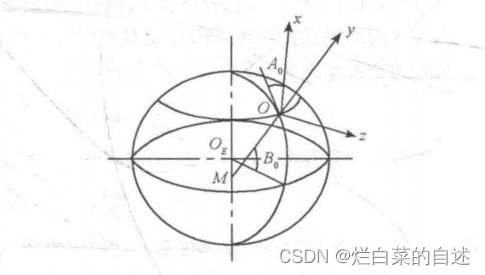
火箭垂直发射,发射系的X轴和箭体的X轴(箭体坐标系)相差90°,并不重合。
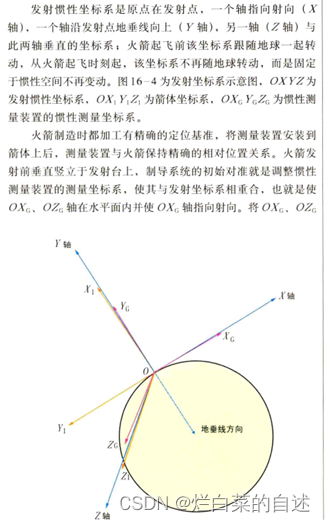
3.2 发惯系(发射惯性系):
以火箭发射点为原点,在起飞瞬间与发射坐标系各轴重合,起飞后,惯性坐标系的各轴方向在惯性空间保持不变。(注意:发惯系只有在起飞的时刻才建立,起飞之前的箭体姿态信息都是相对于发射系的,所以会看到射前针对发射系做的比如综测项目和飞控起飞前惯组陀螺输出数据要刨除地速,而起飞后由于惯组自身为惯性器件,不在地球上不存在地速(相对发惯系),姿态相对发惯系而言的,如果姿态角保持不变,理论上惯组输出角速度应该为0)
3.3 惯组测量坐标系:
惯组自身输出的测量数据对应的坐标系,我们在惯组安装时,一般把惯组和箭体系方向保持一致(惯组测量坐标系和箭体坐标系位置保持一致,其也是非惯性坐标系,所以实际各轴输出是转换后的),这样就少一个坐标系的转换,但是惯组测量坐标系的原点是安装位置,而箭体系原点是质心。这样我们姿控控制时就以惯组测量坐标系来进行实际的控制(实际来说应该是箭体系)。
3.4 箭体系(箭体坐标系,又称本体坐标系):
我们飞控使用的象限轴、和姿态控制的俯仰、偏航、滚动控制都是针对箭体系的,姿控的控制也都是在箭体系下来控制的。(火箭说的象限实际上是象限轴,而不是数学学的一个90°区域)。
象限线:是指箭体系OYZ平面内,Y轴正向为III象限轴(-Y为I象限轴),Z轴正向为IV象限(-Z为II象限轴)。
箭体惯组安装位置为惯组测量坐标系的原点(诸元中高程说的是惯组安装位置的高度),X轴为火箭外壳对称轴,指向箭体的头部,Y轴是与X轴对称且在发射瞬间与发射系xoy平面内的轴(如果地面绝对水平),Z轴由右手坐标系确定。
(注意:书本定义箭体坐标系坐标原点是火箭的质心,我们火箭实际使用时并不是以质心为坐标原点,而是以惯组所在安装位置为坐标原点,质心在运动飞行过程中会伴随质量和各级分离逐渐变化,而质心的变化在发射前已经估算出来了并且在飞行过程中对数据进行了对应比例积分补偿,也就是说我们实际用的箭体坐标系和书本定义的箭体坐标系原点是有差异的)。
3.5 地固系(又称地球固联坐标系):
坐标系的原点Oe在地球质心,OeZe指向地球自转角速度矢量方向(即北极),垂直于赤道平面;OeXe在赤道平面内指向格林尼治子午线;OeYe轴和OeZe、OeXe轴构成右手坐标系。根据参考历元与椭球模型不同,应用不同标准给定的数据,如WGS84,CGCS2000等。我们的GNSS数据数据就是以地固系进行的数据输出。
判断伺服各方向分力注意力是空间三个轴方向分力
5 加速度计原理:
加速度计的敏感原理是外部作用力使得加速度计中的敏感器件产生形变对应输出数据,所以这里的重点是注意敏感的受外力。加速度计测得的数据并不包含重力加速度,比如空中自由落体的物体,加速度计输出为0,因为没有受到外力。而在桌面放着测试加速度计输出实际是外力(支持力)的作用值。故加速度计输出的加速度值称为视加速度(所谓视加速度就是不包含重力加速度以外的加速度)。加速度计是用来测量视加速度的工具。
既然加速度计得到的是视加速度,所以火箭真正飞行的加速度就需要加速度计的视加速度加上所在位置的等效重力加速度得到实际的加速度值。
制导是针对质点运行的控制,关心的是速度和位置(加速度计),质心运动的控制是靠改变火箭俯仰、偏航、滚动姿态角实现的。姿控针对的是姿态俯仰偏航滚动的控制,关心的是角速度(速率陀螺为姿态敏感型器件)。
姿控对姿态的控制为超前控制(但是是在矫正网络中实现,综测不涉及)。
制导的程序角、姿态角的参考坐标系是发惯系(起飞前没有建立发惯系也可能是发射系),具体而言,程序角表示的是发惯系下目标位置相对坐标原点的角度偏差量,姿态角表示的是发惯系下当前位置相对坐标原点的角度偏差量。
姿控控制使用的是箭体系下的姿态角偏差,具体而言,姿态角偏差表示的是在箭体系下当前位置和目标位置之间的角度偏差。
6 姿态角偏差:
火箭的姿态角随着飞行弹道的变化是实现设计好的,称作程序角。然而,飞行过程中的一些随机因素,比如风干扰、结构干扰等会使得姿态角偏离预定值,将实际的飞行姿态角与程序角(理论的姿态角)相减得到的值即称为姿态角偏差,但是这里的姿态角偏差还是发惯系下的姿态角偏差,而姿控控制是在箭体系下,所以需要转换到箭体系下得到箭体系下的姿态角偏差,这就是所谓的姿态偏差解耦。
7 脱插脱拔:
脱插插头和脱拔插头都是箭上使用地供电源供电时的连接插头,脱拔插头是安装在火箭尾部与地面发射控制系统连接的插头,该插头靠火箭起飞时拔动其芯杆而脱落,所以称为脱拔插头。脱落插头是通过电控断开。
8 初始对准和光瞄(光学瞄准)的关系:
从功能上讲,初始对准和光学瞄准都是用来测量惯性测量坐标系(因为惯性测量坐标系和箭体坐标系一般认为是一致的,所以也可以认为是箭体坐标系)和发射系(就是选取参考系,也可能是地固系)的坐标系夹角转换关系,两者功能是一样的。从精度上讲,光瞄的精度更高,因为选用了更高精度的陀螺来标定,而初始对准使用的是火箭自身的惯组用来标定(初始对准不借助外部设备,使用惯组数据测量,光瞄:使用激光进行瞄准)。从流程上讲,软件总检查都会有初始对准的测量,而光瞄只是在真正火箭(真正起竖)发射前做一次。从型号上讲,Y1、Y2做初始对准数据但是实际并没有使用对应的结果,因为有光瞄,而Y3取消了光瞄,因此使用初始对准数据作为输入。
光瞄从工作流程上讲大致报货标定4、粗瞄、精瞄三步。
9 姿控系统极性检查:
(姿控系统极性检查属于射前项目,发惯系未建立,所以姿控的控制是相对于发射系而言的,这就是为什么要刨除地球自转角速度分量的原因
9.1 初始化四元数、姿态角、程序角
依据任务书要求配置初始四元数、姿态角、程序角(程序角初值为0,即不存在角偏差);(软件其实没必要四元数由姿态转换矩阵进行反推,直接给初值就行)
扩展:由四元数计算出的姿态转换矩阵是通用公式,是唯一的,而由欧拉角不同的转序(3次转动)算出的与姿态角的关系是不同的,不同的转序对应姿态角不同。比如321转序下某个俯仰角90°,而312转序俯仰角可能是0°。
9.2 地球自转角速度与陀螺实际有效输出分量计算
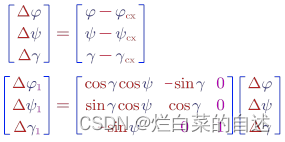
- 由于陀螺在箭体系下的输出是包含地球自转角速度的,因此先计算出陀螺在箭体系下的各轴地球自转角速度分量。地球自转角速度先分解到发射系下比较容易,所以先将地球自转角速度在发射系下的各轴分量进行分解。其分解到三个轴(X Y Z)的方向余弦矩阵如下:其中 代表射向(发射方位角), 代表发射点纬度。
由上述方向余弦矩阵乘以地球自转角速度得到发射系下地球各轴自转分量。
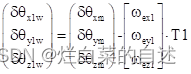
接下来,发射系下地球自转角速度分量乘以发射系到箭体系的姿态转换矩阵 ,即得到箭体系下的地球自转角速度分量。
9.3 进入周期性运算
下属1)-6)属于导航制导解算,7)-9)属于姿控控制
-
周期性采集惯组(或陀螺数据),获得当前周期的陀螺输出的各轴角度增量和视速度增量(箭体系下)。
当前周期箭体系下火箭的角度增量按照下属公式获得,其中T1为控制周期。
-
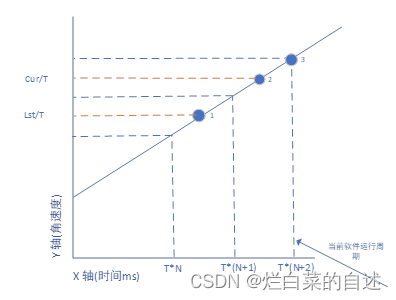
计算角速度:由于角增量/周期并不是准确的代表本周期起始时刻的角速度,这里计算角速度公式用的是(3.0Cur-Lst)/(2.0T1),其中Cur为当前周期的角增量,Lst为上一周期的角增量,T1为控制周期。(这部分任务书也没有体现,属于没有出处),具体机理如下:认为角增量属于线性曲线,如下图。
当周期收到的惯组数据解算后得到的角增量实际是上一个5ms的增量,Cur/T得到速度均值(也就是上一个周期中间时刻的角速度),Lst/T得到速度均值(也就是上上一个周期中间时刻的角速度),由线性比例得到点3也就是当前运行周期起始点的速度值:
Cur/T +( (Cur/T- Lst/T)/T)(T/2) = (3.0Cur-Lst)/(2.0*T1)。
-
有角增量(在发射系下)得到对应的四元数
-
由四元数得到对应的姿态转换矩阵
-
由姿态转换矩阵得到发射系的姿态角(当前姿态相对于发射系原点)
-
见前面关于姿态角偏差的说明,首先得到的是发射系系下姿态角和程序角的姿态角偏差。然后通过解耦矩阵得到姿控要使用的箭体系下的姿态角偏差(箭体系下前后的偏差量)
其中:
分别为制导给出的俯仰、偏航、滚动程序角;
为解耦后箭体坐标系下的姿态角偏差。 -
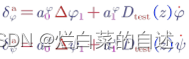
伺服控制:
分别为摆动喷管比例、微分增益系数;Dtest为进行转台滤波综测专门加的滤波系数。(实际的微分就是求导)。得到姿态控制摆角指令
sat为矢量限幅,得到安全的限幅输出。 为总摆角限幅值;
分配到伺服A B作动器上为:

- 俯仰偏航RCS控制:

分别为末修RCS比例、微分增益系数;
分别为俯仰、偏航通道RCS控制反馈;
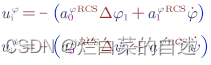
RCS控制借助斯密特触发器进行解算具体结果,得到 分别为俯仰、偏航通道RCS控制指令。
译码算法key=( +1)*9+( +1)*3+( +1)*1,得到键值。然后由键值得到对应的译码表控制指令。
9) 滚控控制:一级滚控和RCS姿控喷管滚控使用的算法相同
为滚动通道RCS控制反馈, 分别为滚动控制比例、微分增益系数

滚控均借助斯密特触发器进行解算具体结果,得到 为滚动通道RCS控制指令, 分别为滚动控制开、关门限。

根据滚动RCS控制指令 ,查表给出滚控装置各个电磁阀的动作指令。
相关文章:
火箭参数相关知识
火箭参数相关 前言:学习笔记,很初级部分内容来之相关书籍,入门学习,欢迎指正 1 坐标系右手定则: 伸开手掌,大拇指指向X轴,四指指向Y轴,四指弯曲90后所指向的方向为Z轴。X 、Y、Z并…...
【JavaEE】死锁是什么?如何避免死锁(保姆级讲解)
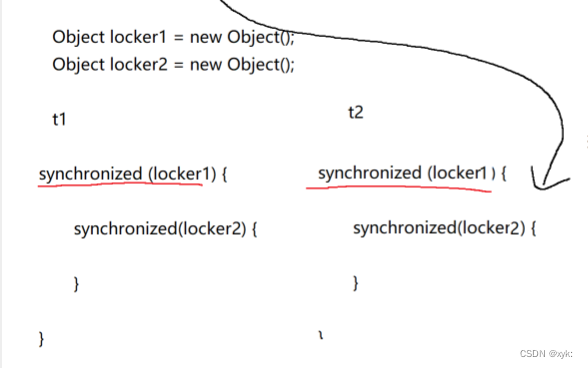
博主简介:想进大厂的打工人博主主页:xyk:所属专栏: JavaEE初阶本篇文章将介绍什么是死锁,死锁的四大必要条件,如何去避免死锁~~~ 目录 一、死锁是什么? 二、关于死锁的情况 2.1 一个线程的情况 2.2 两个线程的情况…...

JS 实现占位符截取字符串内容
//charnum占位长度, //str 字符串内容 //返回charnum占位长度 下的字符串长度; function getcharlength(charnum,str){ var len 0; for (var i 0; i < str.length; i) { var c str.charCodeAt(i); //单字节加1 …...
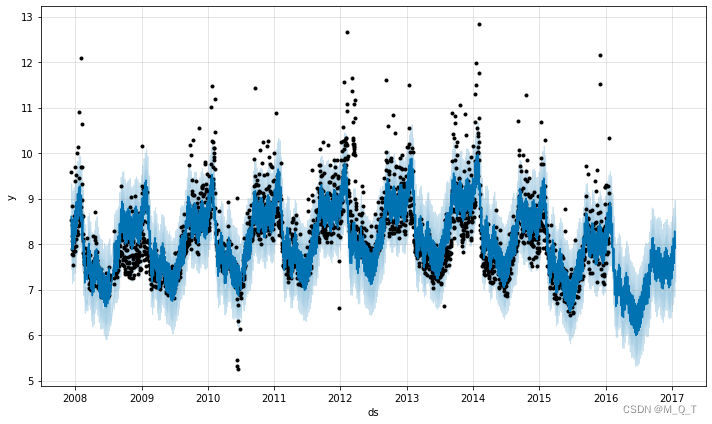
Prophet学习(四)趋势Changepoints
目录 趋势Changepoints(Trend Changepoints) Prophet中的自动更改点检测(Automatic changepoint detection in Prophet) 调整趋势灵活性(Adjusting trend flexibility) 指定变更点的位置(Spe…...

超表面学习 初步印象
超表面学习中 第一章 初步认识 一.传统超表面 1.吸波 2.反射相位 3.透射相位 4.电磁带隙 引申出来的超表面基础应用: 1.透波透镜(对应透射相位) 分为近场和远场 近场:贝塞尔波束等等 远场:方向图控制(对应…...

脂肪肝 肾结石 怎么得来的
脂肪肝怎么得来的1.脂肪肝2.肾结石是如何产生的?1.脂肪肝 是由于肝细胞内脂肪堆积过多引起的慢性疾病,引起脂肪肝的因素有多种,由于常常没有自觉症状,往往不易引起人们的重视。常见原因有以下几种: 第一、过量饮酒&a…...
Python 进阶指南(编程轻松进阶):一、处理错误和寻求帮助
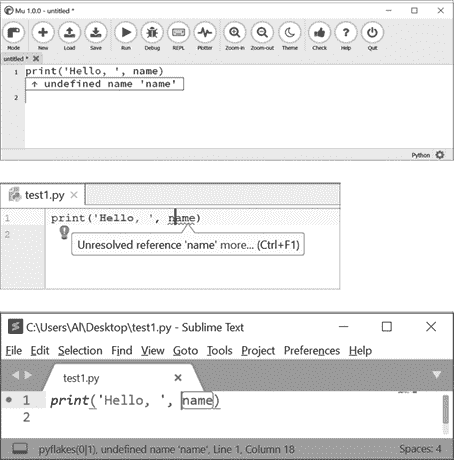
原文:http://inventwithpython.com/beyond/chapter1.html 请您不要将计算机当成佣人,因为这样会让您常常感觉很烦躁。比如说当计算机向您显示错误消息时,并不是因为您冒犯了它。计算机是我们大多数人都会接触到的最复杂的工具,但归…...

windows服务器自带IIS搭建网站并发布公网访问【内网穿透】
文章目录1.前言2.Windows网页设置2.1 Windows IIS功能设置2.2 IIS网页访问测试3. Cpolar内网穿透3.1 下载安装Cpolar3.2 Cpolar云端设置3.3 Cpolar本地设置4.公网访问测试5.结语转载自远程源码文章:【IIS搭建网站】本地电脑做服务器搭建web站点并公网访问「内网穿透…...
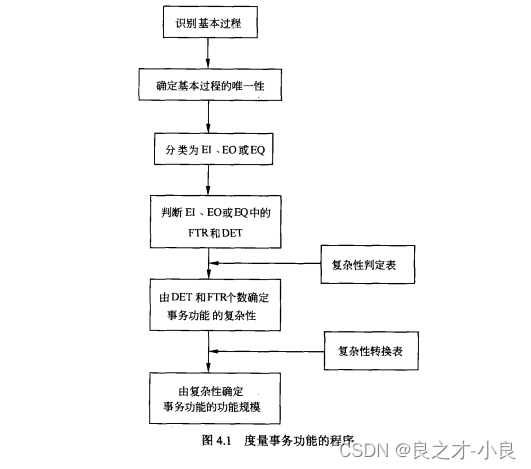
IFPUG功能点度量4:度量事务功能
一、基本概念 1、事务功能 事务功能是处理数据功能的基本过程。 每个事务功能都是一个基本过程。 事务功能由多个逻辑处理来完成。 事务功能包含三种类型:EI、EO、EQ 2、基本过程 一个基本过程是由一个逻辑处理或者多个逻辑处理来完成的。 如何识别…...

未来公寓智能化设计平台项目(上)
目录 1. 项目背景 1.1 建设背景 1.2 建设依据 2. 未来公寓总体方案设计 2.1 建设目标 2.2 未来公寓服务平台总体架构 2.3 功能简介 2.4 方案优势 3. 社区基础数据中心建设 3.1 建设目标 3.1.1 统一数据资产技术架构 3.1.2 完善和规范数据相关标准 3.1.3 统一元数据…...
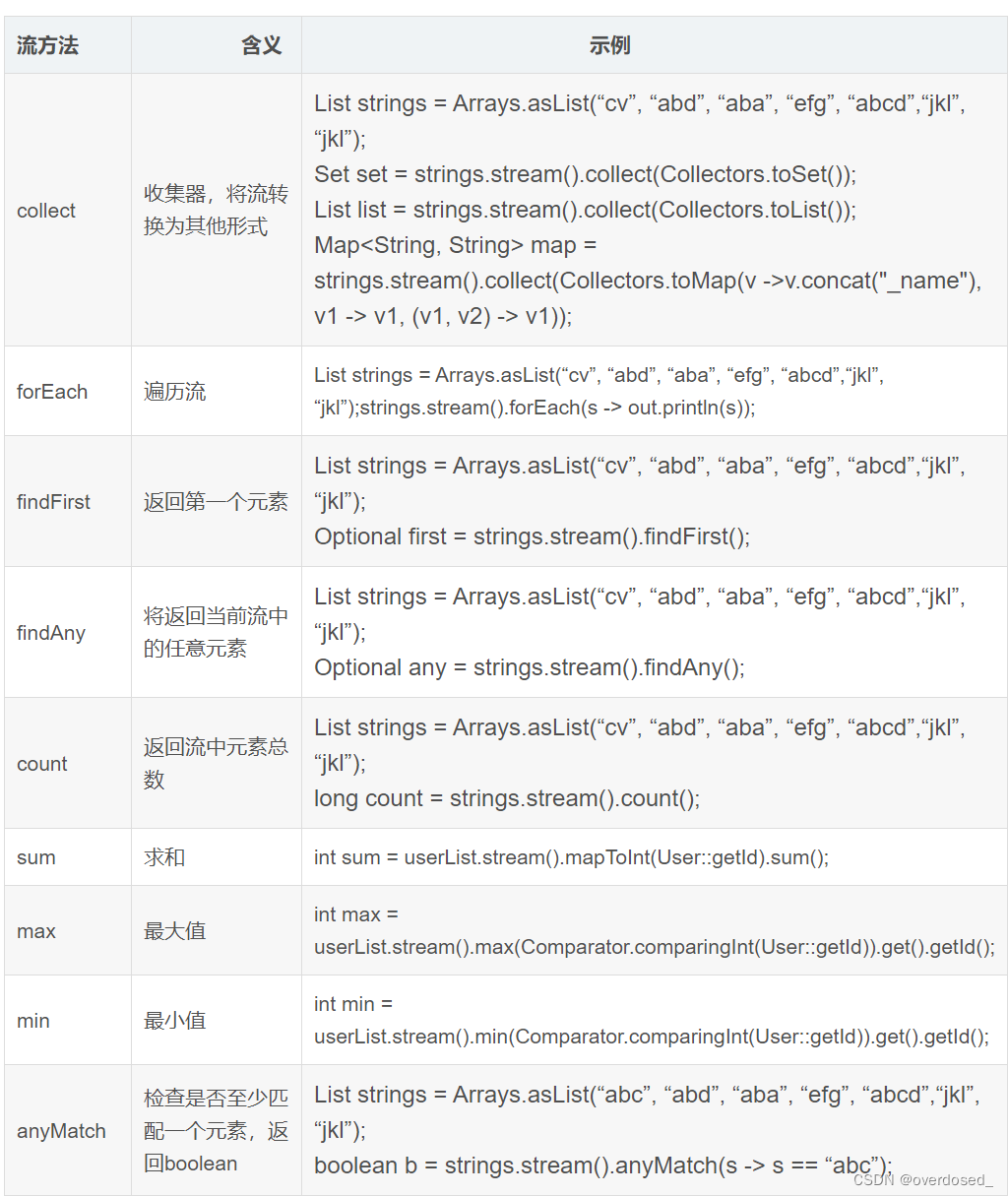
Java8新特性 Steam流
Stream 使用一种类似用 SQL 语句从数据库查询数据的直观方式来提供一种对 Java 集合运算和表达的高阶抽象。 Stream API可以极大提高Java程序员的生产力,让程序员写出高效率、干净、简洁的代码。 这种风格将要处理的元素集合看作一种流, 流在管道中传输&…...

Unity 实现大世界地图的技术原理
在游戏开发中,大世界地图是一种非常重要的场景,它可以让玩家在游戏中自由探索和移动。但是,实现大世界地图也面临着一些技术挑战,比如如何处理大量的地图数据、如何优化地图的加载和渲染等问题。在本文中,我们将介绍Un…...
)
jQuery制作一个简单的打地鼠游戏(超详细讲解)
🙈作者简介:练习时长两年半的Java up主 🙉个人主页:老茶icon 🙊 ps:点赞👍是免费的,却可以让写博客的作者开兴好久好久😎 📚系列专栏:Java全栈,计…...
typora和C51开发环境
经过查阅,可以用wiz和typora联动的方式记录笔记,这样一个文件夹里既可以用typora也可以用内置编辑器(一种富文本编辑器),注意同一个文件不能用不同的编辑器,否则会错乱。以下,我列举了用typora的…...

linux echo彩色打印
定义了三个颜色 把打印的内容加载头和尾巴之间即可 pt_head_green"\033[32;1m" pt_head_red"\033[31;1m" pt_head_yellow"\033[33;1m" pt_tail"\033[0m"echo "$pt_head_yellow | make clean |$pt_tail"...

2023年4月PMP®项目管理专业人士认证招生简章
PMP认证是Project Management Institute在全球范围内推出的针对评价个人项目管理知识能力的资格认证体系。国内众多企业已把PMP认证定为项目经理人必须取得的重要资质。 【PMP认证收益】 1、能力的提升(领导力,执行力,创新能力,竞…...

Java每日一练(20230410)
目录 1. 二叉树的锯齿形层序遍历 🌟🌟 2. 从中序与后序遍历序列构造二叉树 🌟🌟 3. 平衡二叉树 🌟 🌟 每日一练刷题专栏 🌟 Golang每日一练 专栏 Python每日一练 专栏 C/C每日一练 专…...
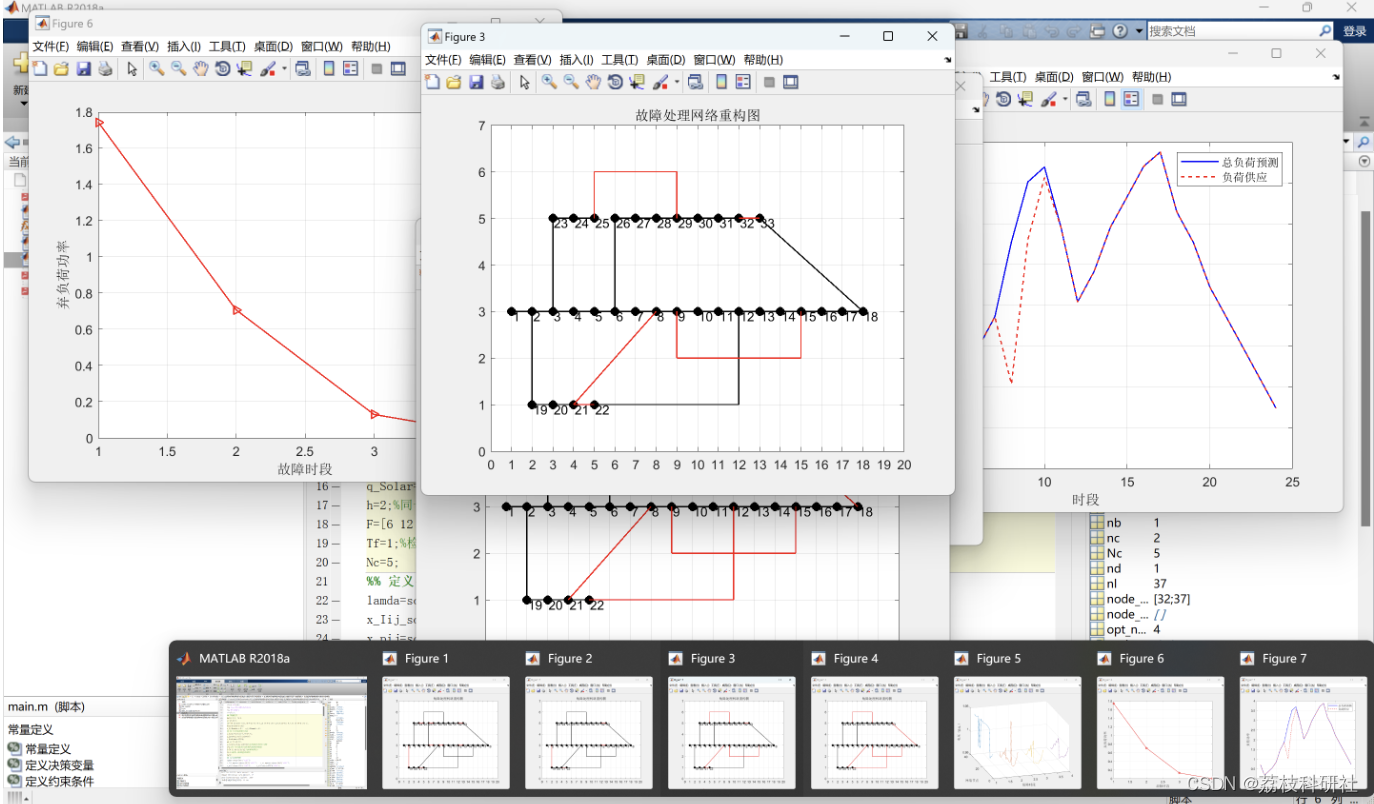
主动配电网故障恢复的重构与孤岛划分统一模型研究【升级版本】(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

TS2023年面试题汇总~~~~持续更新中!!!!
文章目录一、typescript 的数据类型有哪些二、TypeScript 中枚举类型的理解三、TypeScript 中接口的理解四, TypeScript 中类的理解五,TypeScript 中泛型的理解?六,TypeScript 中高级类型的理解?六,TypeScr…...
CSS模块的书写以及删除线的作用和来历什么是删除线
<!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><title>Title</title><style>/*关羽这一行代码变为绿色*/#gy_li{color: green}/*张飞,苹果这一行代码变为黄色*/#zf_li,#pg_ul{color: yellow}/*i…...

等压雨幕原理在铝合金窗的应用
等压雨幕原理在铝合金窗的应用 摘要: 针对常见的样窗水密气密不达标,首先概述等压雨幕的作用原理,然后介绍其在铝合金门窗应用中的代表性细节。可以看出,控制框扇搭接处的间隙很重要,以及密封胶条合理设计选用的重要性。而且日系推拉采用等压设计的方式很值得借鉴。 关键…...

高性能键盘映射与SOCD清理架构解析:解决游戏输入冲突的技术方案
高性能键盘映射与SOCD清理架构解析:解决游戏输入冲突的技术方案 【免费下载链接】socd Key remapper for epic gamers 项目地址: https://gitcode.com/gh_mirrors/so/socd 在竞技游戏和高速动作游戏中,键盘输入的处理方式直接影响玩家的操作精度和…...

跨越平台限制:如何用WorkshopDL免费获取Steam创意工坊模组
跨越平台限制:如何用WorkshopDL免费获取Steam创意工坊模组 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 还在为Epic Games或GOG平台无法访问Steam创意工坊而烦恼吗…...

避坑指南:Unity游戏在Linux上运行报错?OpenCV依赖和文件权限问题排查实录
Unity游戏Linux部署避坑指南:从权限修复到OpenCV依赖全解析 当你在Ubuntu上双击那个刚导出的Unity游戏.x86_64文件时,屏幕却弹出一行冰冷的错误信息——这种从云端跌入谷底的体验,每个跨平台开发者都经历过。不同于Windows的一键运行…...

开源技能库构建指南:Git+Markdown+Docsify打造个人技术知识体系
1. 项目概述:一个开源技能库的诞生与价值在技术领域,尤其是软件开发、运维和数据分析等方向,我们每天都在与海量的工具、框架和命令打交道。时间一长,一个很现实的问题就摆在了面前:那些曾经花了好几个小时才调通的复杂…...

安卓客户端架构解析:从MVVM到网络通信的完整实践
1. 项目概述:一个面向安卓设备的智能客户端最近在整理手头的开源项目时,发现了一个挺有意思的仓库,名字叫TOM88812/xiaozhi-android-client。光看这个标题,你可能会有点摸不着头脑,这“小智”到底是个啥?是…...

深度解析VS Code Live Server:高效前端开发实时预览配置秘籍
深度解析VS Code Live Server:高效前端开发实时预览配置秘籍 【免费下载链接】vscode-live-server Launch a development local Server with live reload feature for static & dynamic pages. 项目地址: https://gitcode.com/gh_mirrors/vs/vscode-live-serv…...

GPT-4 API交互式实验场:开发者如何自建安全可控的Playground
1. 项目概述:一个面向开发者的GPT-4交互式实验场如果你是一名开发者,或者对大型语言模型(LLM)的应用开发感兴趣,那么你很可能已经不止一次地思考过:如何能更高效、更直观地测试GPT-4的API能力?如…...
)
Midjourney Mud印相实战手册(含12组高保真历史文物级Mud Prompt库+对应seed校验表)
更多请点击: https://intelliparadigm.com 第一章:Midjourney Mud印相的技术起源与美学范式 Mud印相(Mud Printing)并非传统暗房工艺的直系衍生物,而是Midjourney V6 模型在高语义控制模式下催生的一种跨模态视觉隐喻…...

为什么你需要Markdown Viewer:浏览器中预览Markdown文件的终极解决方案
为什么你需要Markdown Viewer:浏览器中预览Markdown文件的终极解决方案 【免费下载链接】markdown-viewer Markdown Viewer / Browser Extension 项目地址: https://gitcode.com/gh_mirrors/ma/markdown-viewer 还在为浏览器无法直接打开.md文件而烦恼吗&…...