David Silver Reinforcement Learning -- Markov process
1 Introduction
这个章节介绍关键的理论概念。
马尔科夫过程的作用:
1)马尔科夫过程描述强化学习环境的方法,环境是完全能观测的;
2)几乎所有的RL问题可以转换成MDP的形式;
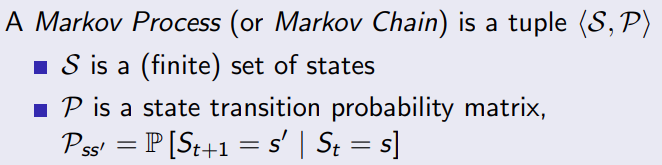
2 Markov Processes
2.1 Markov 属性
属性1:未来和过去无关,只受当前的状态影响

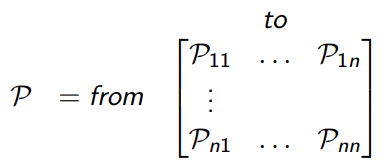
2.2 转移概率矩阵
从当前状态S转移到S’状态的概率,每行的概率之和为1.
2.3 markov chains
马尔科夫过程是无记忆的随机过程,一串状态以及markov的属性。一个马尔科夫过程,只要有有限个状态,以及他们之间相互转换的概率,就可以构建。
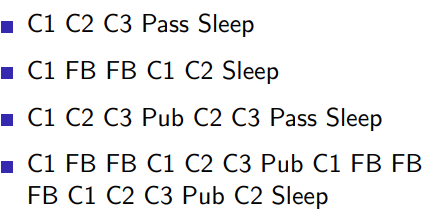
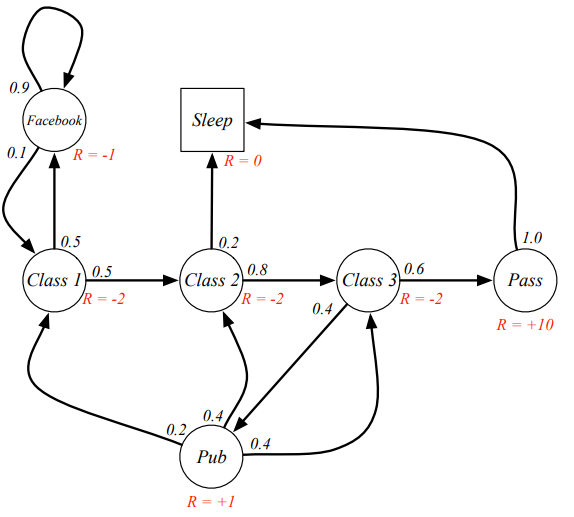
课程上给出了一个例子:
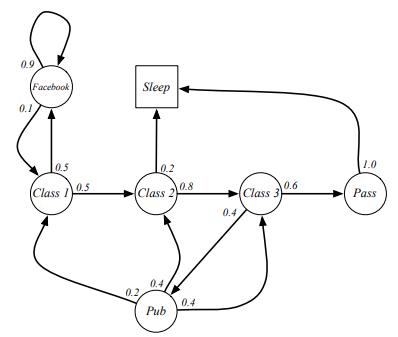
对应的转移概率矩阵
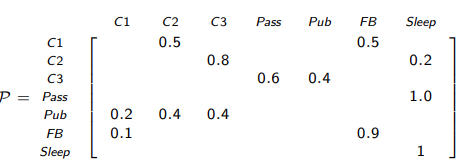
从class1 到 sleep有很多的链条
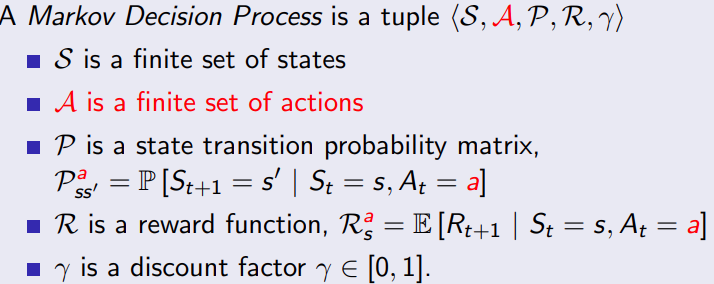
3 markov decision process
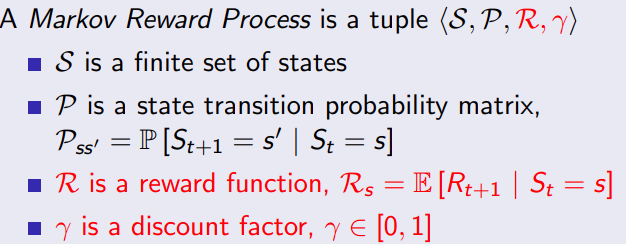
3.1 定义
马尔科夫奖励过程就是markov链和每个状态的reward
在马尔可夫决策过程(Markov Decision Process, MDP)中,奖励函数(reward function)是一个用于表示智能体在执行某个动作后所获得的即时奖励的函数。奖励函数通常用于指导智能体的行为,使其学会在面对不同的状态时做出对其最有利的决策。
3.2 return
从时刻t开始的总折扣奖励是Gt。这里的折扣奖励是指将未来的奖励按照一定的比例进行打折,以体现当前奖励的价值。通过调整 γ \gamma γ调整未来reward的权重。

通过这个公式,可以算出来,从当前C1到最后SLEEP这个链的reward,比如可以用来选择走那条路径更优。

为什么要对后续的reward的添加权重
1.添加权重计算上比较简单;
2.避免循环马尔科夫链出现无穷大的情况
3.倾向于对眼前的利益
4.有时候也可能出现权重不衰减的情况;
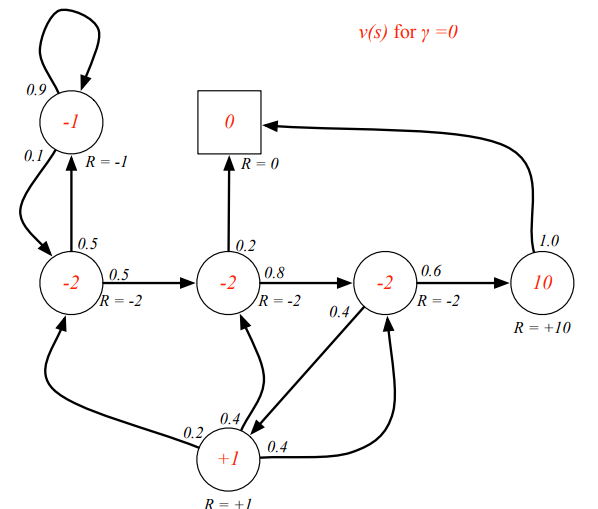
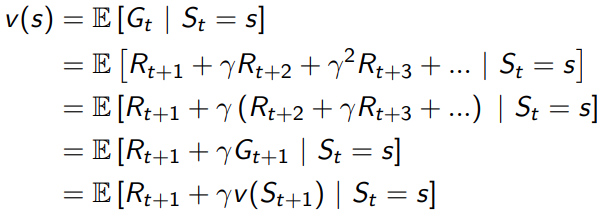
3.3 value function
本质上还是用来评价当前这个状态好不好的,如何去评价,从当前状态到最终状态,可以积多少分

最简单的情况, γ = 0 \gamma=0 γ=0,完全不考虑未来
求一下S1 = C1, γ = 0.5 \gamma=0.5 γ=0.5的value值
问题:从S1=C1到最终的Sleep有很多条路径,那就有很多个结果,因为有状态概率矩阵,所以可以得到一个期望值?

value function 必然选择最好的一条路径作为评价当前state的数值,这是一个典型的动态规划问题。
动态规划问题的思路就是将问题拆成更小的问题,当前 S t S_t St的value function不知道,但是只要知道 S t + 1 S_{t+1} St+1的状态,很容易得到当前时刻的value function。
用图表示就是这个样子的
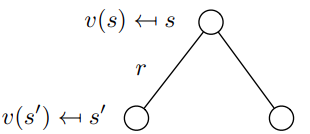
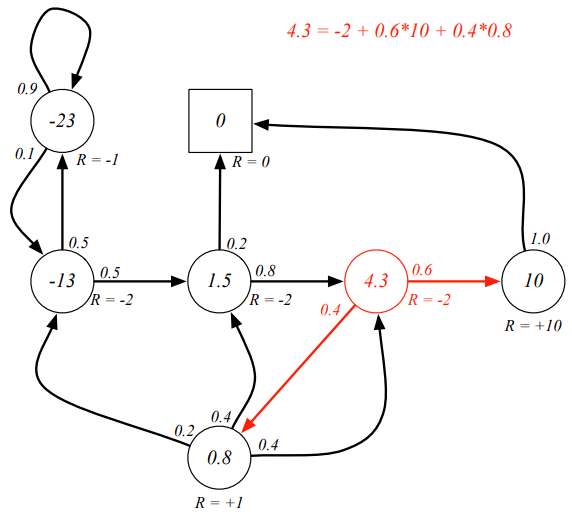
用动态规划的方法进行求解,且 γ = 1 \gamma=1 γ=1,得到一下的markov 状态的value function.
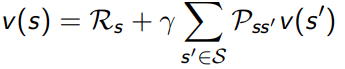
用矩阵的形式进行求解,
v = R + γ ∗ P ∗ v v = ( I − γ ∗ P ) − 1 R \begin{aligned} v &= R + \gamma * P* v \\ v &= (I - \gamma *P)^{-1}R \end{aligned} vv=R+γ∗P∗v=(I−γ∗P)−1R
验算一下上面的结果,因为$ (I - \gamma *P)$不可逆,比较悲剧,和上面这个结果差距很大,所以只能用其他方法来进行计算
,用value iteration的方法进行求解,因为我们这个问题维度比较小,只要最终状态收敛了就行。
function state_value = valueIterator(transition_matrix, reward_vector, discount_factor, tolerance)n = size(transition_matrix, 1);state_value = zeros(n, 1);delta = inf;while delta > tolerancenew_state_value = reward_vector + discount_factor * transition_matrix * state_value;delta = max(abs(new_state_value - state_value));state_value = new_state_value;end
end
求解结果: -12.5432, 1.4568, 4.3210, 10.0000, 0.8025, -22.5432, 0
1)动态规划,对于我们这个问题,可以尝试用动态规划
2)monte-carlo evaluation
3) temporal difference learning
4 Markov decision processes
马尔科夫奖励过程上再加上决策;
从S到S’,是因为有action的推动。
问题:既然有action主动的去推动,还需要状态转移概率矩阵吗?
一种理解方式:处于当前状态S,有 P s s ′ a P^a_{ss'} Pss′a的概率去执行动作a;
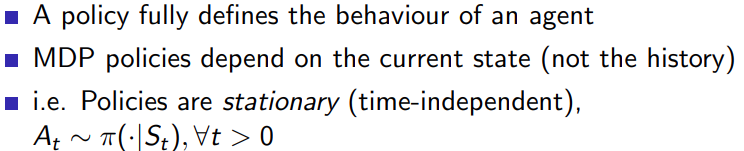
4.1 policies
在马尔可夫决策过程(MDP)的环境中,策略是一个从状态到动作的映射,表示代理(Agent)在每个状态下选择采取哪个动作的规则。通常用π表示策略,即π(a|s)表示在状态s下采取动作a的概率
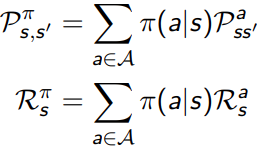
再来理解一下状态转移矩阵和policy矩阵的区别
状态转移矩阵(Transition Matrix):它表示在给定状态下执行某个动作后到达下一个状态的概率。状态转移矩阵的元素P(s’|s, a)表示在状态s下执行动作a,然后到达状态s’的概率。状态转移矩阵是MDP中一个固定的特性,与策略无关。它描述了在执行一个动作后,环境如何变化。
策略(Policy)矩阵:它表示在给定状态下选择执行某个动作的概率。策略矩阵的元素π(a|s)表示在状态s下选择执行动作a的概率。策略矩阵是MDP中的一个可调整的特性,可以根据需要选择不同的策略。它描述了在给定状态下,智能体如何选择执行动作。
考虑policy之后,从状态s到状态s’,要先经过一个状态概率输出动作a,然后再由 P s s ′ a P_{ss'}^a Pss′a的状态转移矩阵过去。
书中给的这两个关系,不太能理解
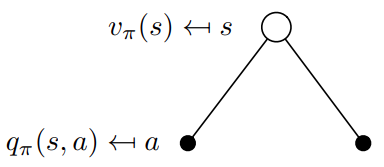
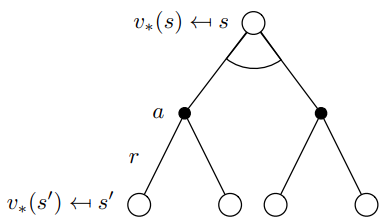
4.2 Value functions
4.2.1 state-value function
状态之间的转移如今不是单纯的确定概率了,而且可以通过策略进行调整了,在新策略之下,衡量当前S的状态评分。
状态价值函数 V(s):在状态 s 下遵循策略π的预期回报。即在状态 s 下,智能体采取策略π所能获得的长期回报的期望值。

使用公式进行计算,
V π ( s ) = ∑ a ∈ A π ( a ∣ s ) [ R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ′ ) ] V_{\pi}(s) = \sum_{a \in \mathcal{A}} \pi(a|s) \left[R(s, a) + \gamma \sum_{s' \in \mathcal{S}} P(s'|s, a) V_{\pi}(s')\right] Vπ(s)=a∈A∑π(a∣s)[R(s,a)+γs′∈S∑P(s′∣s,a)Vπ(s′)]
从用下图去表示,
转换成矩阵形式, v π ( s ) v_{\pi}(s) vπ(s)是一个
找一个简单的问题:
假设一个机器人处于一个4x4的网格世界,每个网格代表一个状态,共有16个状态(S1至S16)。机器人可以采取四个动作:上(U)、下(D)、左(L)和右(R)。假设机器人在状态S1(左上角),试图向右移动。然而,由于地面湿滑,机器人执行动作的不确定性使得实际移动方向可能发生偏移。
在这个例子中,当机器人试图从状态S1向右移动时,实际状态转移概率分布可能如下:
转移到状态S2(向右)的概率:0.8
转移到状态S5(向下)的概率:0.2
我们用一个4x4x4的张量来表示状态转移矩阵,第一维表示动作(上、下、左、右),第二维表示起始状态,第三维表示目标状态。这里我们仅提供一个概要的状态转移矩阵,仅包含部分非零元素
% 参数设置
num_states = 16;
num_actions = 4;
gamma = 0.9; % 折扣因子
theta = 1e-6; % 阈值,用于判断价值函数收敛
max_iter = 1000; % 最大迭代次数% 状态转移矩阵 (4x16x16,对应于动作的顺序是:上、下、左、右)
P = zeros(num_actions, num_states, num_states);% 定义状态转移矩阵的函数
% 省略了具体的状态转移矩阵实现,您可以根据之前的讨论来定义状态转移矩阵% 奖励函数(16x4,行表示状态,列表示动作)
% 您可以根据实际问题自定义奖励函数
R = ...;% 策略(16x4,行表示状态,列表示动作),均匀随机策略
policy = ones(num_states, num_actions) / num_actions;% 初始化状态价值函数(1x16)
V = zeros(1, num_states);% 迭代计算状态价值函数
for iter = 1:max_iterV_old = V;for s = 1:num_statesV_temp = 0;for a = 1:num_actionsV_temp = V_temp + policy(s, a) * (R(s, a) + gamma * sum(P(a, s, :) .* V_old));endV(s) = V_temp;end% 判断价值函数是否收敛if max(abs(V - V_old)) < thetabreak;end
end% 输出状态价值函数
disp(V);
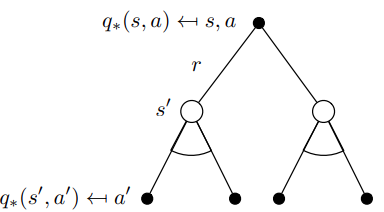
4.2.2 action value function
用于评估在给定策略下,一个状态下采取某个动作的长期价值。它表示从当前状态开始,首先执行某一特定动作,然后遵循给定策略,预期累计奖励的期望值。用Q(s, a)表示动作价值函数,其中s为状态,a为动作,Q(s, a)为在状态s下执行动作a的动作价值。
动作价值函数的意义在于,它可以帮助智能体在给定状态下选择最优的动作。通过比较不同动作的动作价值函数,智能体可以选择具有最高长期价值的动作,从而实现策略的优化。
为了选择最优的动作,智能体可以比较这些动作的动作价值函数Q(s, a),并选择具有最高价值的动作。例如,如果在当前位置,向右移动的动作价值函数Q(s, 右)最高,智能体将选择向右移动,以期望获得最大的累计奖励。
总之,状态价值函数V(s)用于评估在给定策略下,一个状态的长期价值;动作价值函数Q(s, a)用于评估在给定策略下,一个状态下采取某个动作的长期价值。动作价值函数对智能体具有重要意义,因为它可以帮助智能体在给定状态下选择最优的动作,从而实现策略的优化。
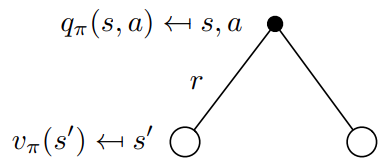
用action value function的定义就能看出,跟后续的状态的state value是相关的,接下来推导他们的关系。

从公式来看,执行一连串的
Q π ( s , a ) = R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ′ ) Q^{\pi}(s, a) = R(s, a) + \gamma \sum_{s' \in S} P(s'|s, a) V^{\pi}(s') Qπ(s,a)=R(s,a)+γs′∈S∑P(s′∣s,a)Vπ(s′)
这个公式很容易理解,
4.2.3 用bellman function 总结上面的关系
V π ( s ) = ∑ a ∈ A π ( a ∣ s ) [ R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ′ ) ] R π ( s ) = ∑ a ∈ A π ( a ∣ s ) R ( s , a ) P π ( s ′ ∣ s ) = ∑ a ∈ A ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ) = R π ( s ) + γ P π ( s ′ ∣ s ) V π ( s ) \begin{aligned} V_{\pi}(s) &= \sum_{a \in \mathcal{A}} \pi(a|s) \left[R(s, a) + \gamma \sum_{s' \in \mathcal{S}} P(s'|s, a) V_{\pi}(s')\right] \\ R^{\pi} (s)& = \sum_{a \in \mathcal{A}} \pi(a|s) R(s, a) \\ P^{\pi}(s'|s) & = \sum_{a \in \mathcal{A}} \sum_{s' \in \mathcal{S}} P(s'|s, a) \\ V_{\pi}(s) & = R^{\pi}(s)+\gamma P^{\pi}(s'|s) V_{\pi}(s) \end{aligned} Vπ(s)Rπ(s)Pπ(s′∣s)Vπ(s)=a∈A∑π(a∣s)[R(s,a)+γs′∈S∑P(s′∣s,a)Vπ(s′)]=a∈A∑π(a∣s)R(s,a)=a∈A∑s′∈S∑P(s′∣s,a)=Rπ(s)+γPπ(s′∣s)Vπ(s)
看一下带policy的reward的应该如何定义,R(s,a)表示处于状态s情况下,采用动作a的奖励,
R π R^{\pi} Rπ表示在给定策略π下,智能体在状态s采取不同动作a的期望奖励。
4.3 optimal value functions
4.3.1 optimal state value function
找一个最好的policy去最大化状态value function
找一个最好的policy去最大化action value function

定义什么是最优的policy
所有的state, 取得了最大的value function
所有的action,取得了最大的action value 数值


4.3.2 如何寻找optimal policy
简单理解就是要最大化action value的期望。
要确定全局的最优策略,我们需要关注的是状态-动作价值函数(state-action value function),也被称为Q-function。Q-function 衡量了在特定策略下,从某一状态(state)采取某一动作(action)开始所能获得的期望累积奖励。我们可以使用贝尔曼最优方程(Bellman optimality equation)来寻找最优策略。
再来回顾一下action value function的定义,
Q π ( s , a ) = R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ′ ) V π ( s ) = ∑ a ∈ A π ( a ∣ s ) [ R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V π ( s ′ ) ] Q ∗ ( s , a ) = R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V ∗ ( s ′ ) V ∗ ( s ) = max a ( R ( s , a ) + γ ∑ s ′ P ( s ′ ∣ s , a ) V ∗ ( s ′ ) ) \begin{aligned} Q^{\pi}(s, a) &= R(s, a) + \gamma \sum_{s' \in S} P(s'|s, a) V^{\pi}(s') \\ V_{\pi}(s) &= \sum_{a \in \mathcal{A}} \pi(a|s) \left[R(s, a) + \gamma \sum_{s' \in \mathcal{S}} P(s'|s, a) V_{\pi}(s')\right]\\ Q^{*}(s, a) &= R(s, a) + \gamma \sum_{s' \in S} P(s'|s, a) V^{*}(s') \\ V^*(s) & = \max_a \left( R(s, a) + \gamma \sum_{s'} P(s'|s, a) V^*(s') \right) \\ \end{aligned} Qπ(s,a)Vπ(s)Q∗(s,a)V∗(s)=R(s,a)+γs′∈S∑P(s′∣s,a)Vπ(s′)=a∈A∑π(a∣s)[R(s,a)+γs′∈S∑P(s′∣s,a)Vπ(s′)]=R(s,a)+γs′∈S∑P(s′∣s,a)V∗(s′)=amax(R(s,a)+γs′∑P(s′∣s,a)V∗(s′))
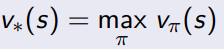
重要的公式1,optimal value function 和optimal action value function的关系
V ∗ ( s ) = max a Q ∗ ( s , a ) V^*(s) = \max_a Q^*(s, a) V∗(s)=amaxQ∗(s,a)
它表示在状态 s s s下,最优状态价值函数 V ∗ ( s ) V^*(s) V∗(s)等于所有可能动作的最优状态-动作价值函数 Q ∗ ( s , a ) Q^*(s, a) Q∗(s,a)的最大值。换句话说,如果我们遵循最优策略,在状态 s s s下,我们会选择那个能让我们获得最大期望累积奖励的动作。
从理解的角度, state的value和最优的action的结果相同,
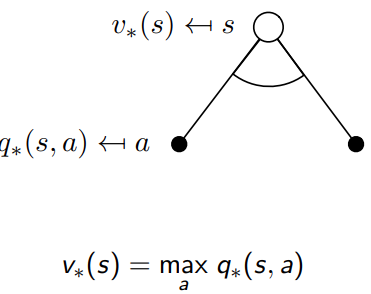
重要的公式2,optimal value function 和optimal action value function的关系
Q ∗ ( s , a ) = R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V ∗ ( s ′ ) V ∗ ( s ) = max a ( R ( s , a ) + γ ∑ s ′ P ( s ′ ∣ s , a ) V ∗ ( s ′ ) ) \begin{aligned} Q^{*}(s, a) &= R(s, a) + \gamma \sum_{s' \in S} P(s'|s, a) V^{*}(s') \\ V^*(s) & = \max_a \left( R(s, a) + \gamma \sum_{s'} P(s'|s, a) V^*(s') \right) \\ \end{aligned} Q∗(s,a)V∗(s)=R(s,a)+γs′∈S∑P(s′∣s,a)V∗(s′)=amax(R(s,a)+γs′∑P(s′∣s,a)V∗(s′))
Q ∗ ( s , a ) = R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) V ∗ ( s ′ ) Q ∗ ( s , a ) = R ( s , a ) + γ ∑ s ′ ∈ S P ( s ′ ∣ s , a ) max a ′ q ∗ ( s ′ , a ′ ) \begin{aligned} Q^{*}(s, a) &= R(s, a) + \gamma \sum_{s' \in S} P(s'|s, a) V^{*}(s') \\ Q^{*}(s, a) &= R(s, a) + \gamma \sum_{s' \in S} P(s'|s, a) \max_{a'} q^*(s',a') \end{aligned} Q∗(s,a)Q∗(s,a)=R(s,a)+γs′∈S∑P(s′∣s,a)V∗(s′)=R(s,a)+γs′∈S∑P(s′∣s,a)a′maxq∗(s′,a′)
求解的办法
1)value iteration
2) Policy iteration
3) Q-learning
4) Sarsa
5 Extensions to MDPs
5.1 infinite and continuous mdps
- Countably infinite state and/or action spaces
- Straightforward
- Continuous state and/or action spaces
- closed form for linear quadratic model
- continuous time
- 需要微分动态方程
- HJB 方程
- limiting case of Bellman equation as time-step
5.2 Partially observable MDPs
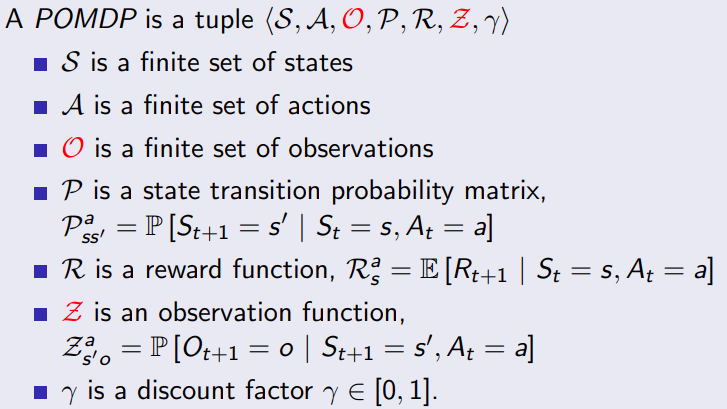
5.2.1 belief states


5.3 Undiscounted, average reward MDP
相关文章:
David Silver Reinforcement Learning -- Markov process
1 Introduction 这个章节介绍关键的理论概念。 马尔科夫过程的作用: 1)马尔科夫过程描述强化学习环境的方法,环境是完全能观测的; 2)几乎所有的RL问题可以转换成MDP的形式; 2 Markov Processes 2.1 Mark…...

项目结束倒数2
今天,解决了,多个点的最短路问题 用的dfs,配上了floyed计算出的广源距离 难点是要记录路线,dfs记录路线就很烦 但是好在结束了,经过无数的测试,确保没啥问题(应该把) 来看看我的代码 void dfs(int b[], int x, int* sum, int last, int sums, int a[], BFS& s, Floyd_A…...
VBA智慧办公9——图例控件教程
如图,利用VBA进行可视化交互界面的设计,在界面中我们用到了label,button,text,title等多个工具,在进行框图效果的逐一实现后可进行相应的操作和效果实现。 VBA(Visual Basic for Applications&a…...

Presto VS Spark
环境配置 5个节点,每个节点10G内存。 测试SQL,每个执行3次,求平均,对比计算性能。 版本信息 Spark:2.3.1Presto: 0.208 10亿量级查询性能对别 Spark: spark-sql> select sex,count(1) from conta…...
为什么我们能判断声音的远近
想象一下,当我们走在路上时,听到了头顶的鸟儿在树梢间的叫声,即使无法透过浓密的树叶看见它,也可以大致知道鸟儿的距离。此时身后传来由远到近自行车铃铛声,我们并不需要回过头去看,便为它让开了道路。这些…...

那些关于DIP器件不得不说的坑
了解什么是DIP DIP就是插件,采用这种封装方式的芯片有两排引脚,可以直接焊在有DIP结构的芯片插座上或焊在有相同焊孔数的焊位中。其特点是可以很方便地实现PCB板的穿孔焊接,和主板有很好的兼容性,但是由于其封装面积和厚度都比较…...
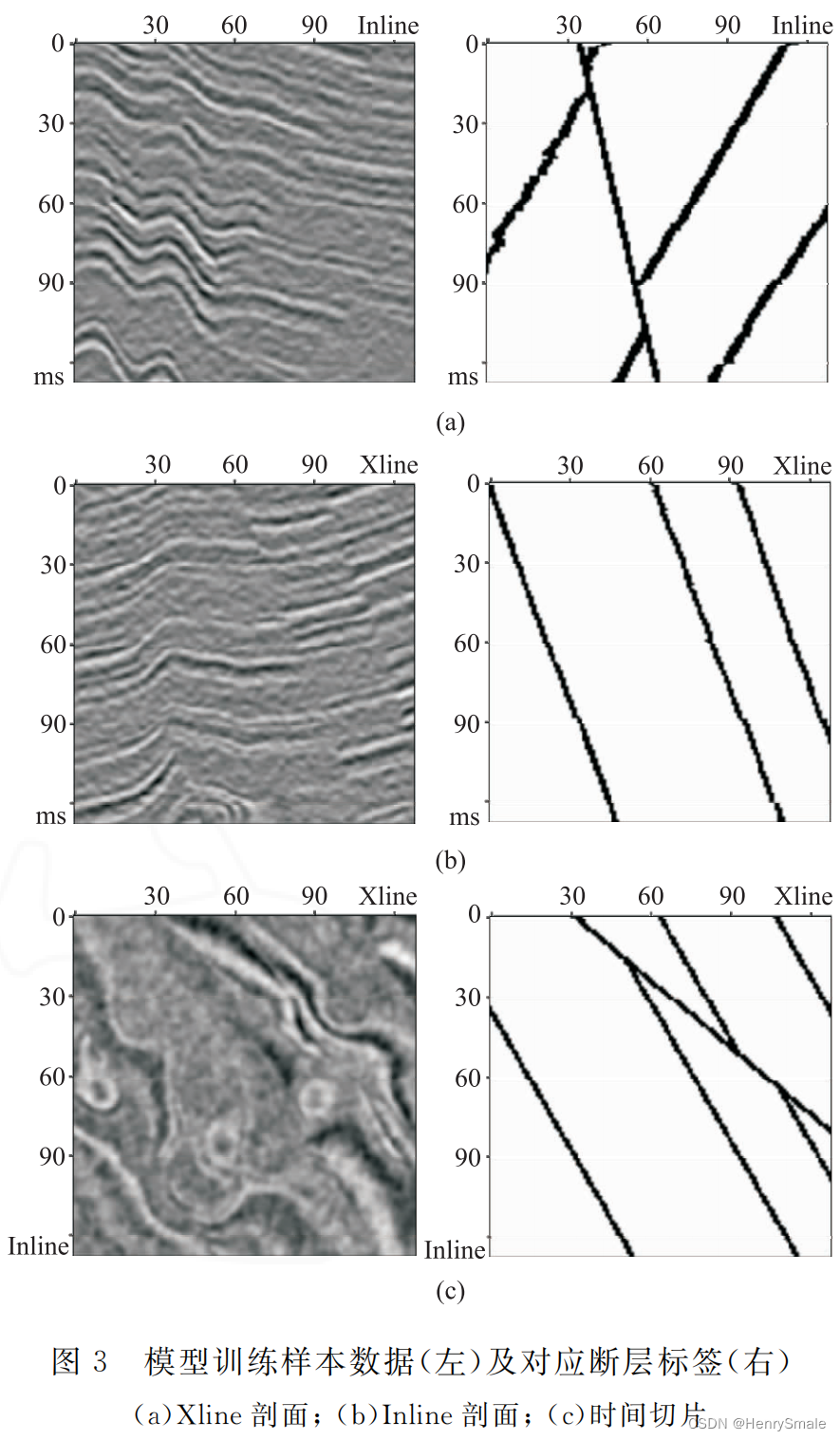
论文笔记:基于U-Net深度学习网络的地震数据断层检测
0 论文简介 论文:基于U-Net深度学习网络的地震数据断层检测 发表:2021年发表在石油地球物理勘探 1 问题分析和主要解决思路 问题:断层智能识别,就是如何利用人工智能技术识别出断层。 解决思路:结合U-N…...
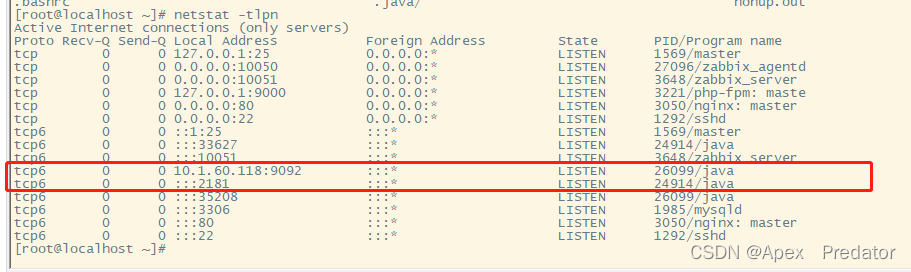
kafka单节点快速搭建
1.搭建使用centos7主机,关闭防火墙和selinux服务 2.创建kafka存放目录 mkdir /etc/kafka 3.从kafka官网下载安装包 我这里下载了3.3.1版本的kafka,放到kafka目录中 下载地址:Apache Kafka 4.解压安装包并更改名称 tar -zxvf /etc/kaf…...
常用函数)
【MySQL】(6)常用函数
文章目录 日期函数获取日期日期计算 字符串函数charsetconcatlengthsubstringreplaceinstrstrcmpltrim, rtrim, trim 数学函数absbin, hexconvceiling, floorrandformatmod 其他函数user() 查询当前用户密码加密md5()password() database() 查看当前数据库ifnull() 日期函数 函…...

Linux学习 Day1
注意: 以下内容均为本人初学阶段学习的内容记录,所以不要指望当成查漏补缺的字典使用。 目录 1. ls指令 2. pwd指令 3. cd指令 4. touch指令 5. mkdir指令(重要) 6. rmdir指令 && rm 指令(重要ÿ…...

Hibernate中的一对多和多对多关系
Hibernate的一对多和多对多 Hibernate是一个优秀的ORM框架,它简化了Java应用程序与关系型数据库之间的数据访问。在Hibernate中,我们可以使用一对多和多对多的关系来处理复杂的数据模型。本文将介绍Hibernate中的一对多和多对多,包括配置和操…...
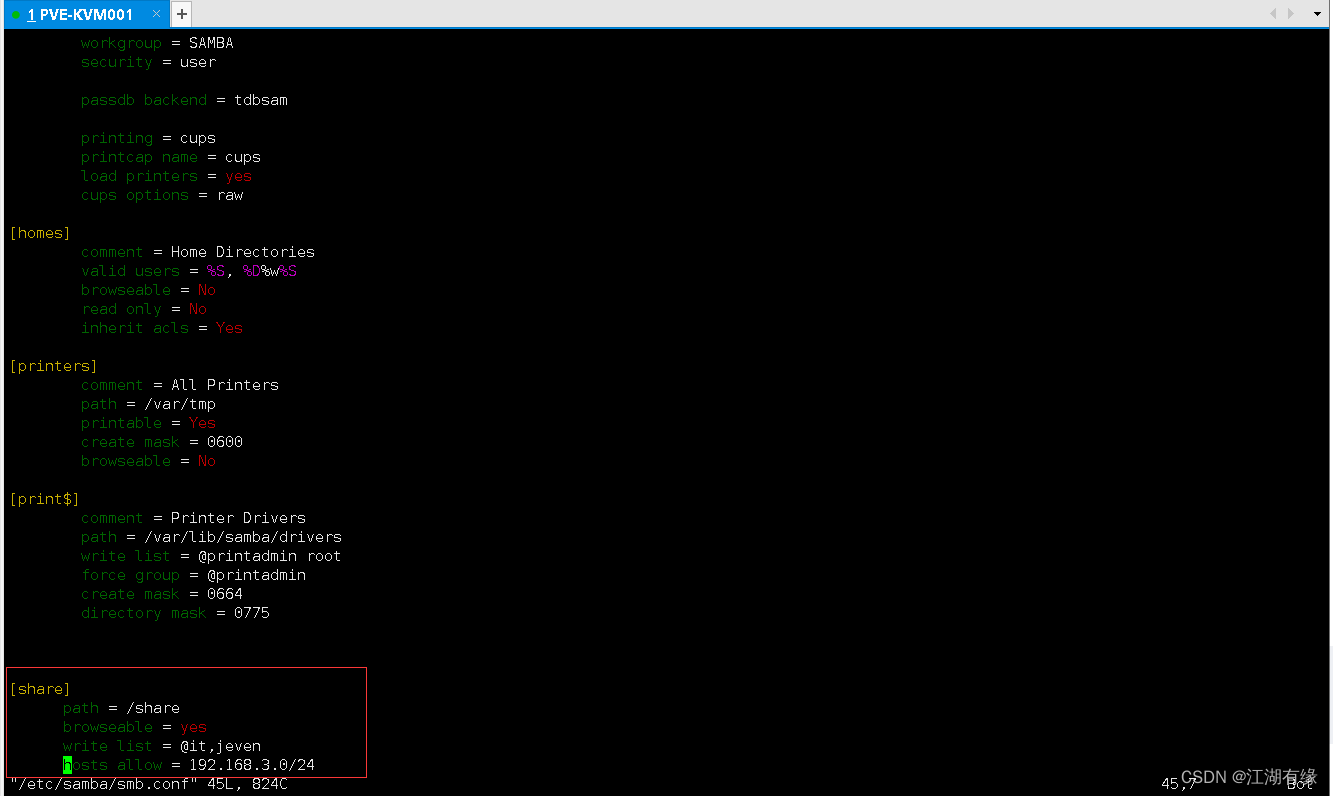
Linux系统之部署Samba服务
Linux系统之部署Samba服务 一、Samba服务介绍1.Samba服务简介2.NFS和CIFS简介3.Smaba服务相关包4.samba监听端口4.samba相关工具及命令 二、环境规划介绍1.环境规划2.本次实践介绍 三、Samba服务端配置1.检查yum仓库2.安装smaba相关软件包3.创建共享目录4.设置共享目录权限5.新…...

回顾产业互联网的发展历程,技术的支撑是必不可少的
从以新零售、全真互联网为代表的产业互联网的概念诞生的那一天开始,互联网的玩家们就一直都在寻找着它们的下一站。尽管在这个过程当中,遭遇到了很多的困难,走过了很多的弯路,但是,产业互联网的大方向,却始…...

关于gas费优化问题
关于gas费优化问题 首先我们先来看一下这段代码 // SPDX-License-Identifier: MIT pragma solidity ^0.8.0; contract GasGolf{uint public total;//[1,2,3,4,5,100]function sum(uint[] memory nums) external{for(uint i 0;i<nums.length;i1){bool isEven nums[i] % 2…...
Linux——中断和时间管理(中)
目录 驱动中的中断处理 中断下半部 软中断 tasklet 工作队列 驱动中的中断处理 通过上一节的分析不难发现,要在驱动中支持中断,则需要构造一个 struct irqaction的结构对象,并根据IRQ 号加入到对应的链表中(因为 irq_des 已经在内核初始…...

嵌入式软件中常见的 8 种数据结构详解
目录 第一:数组 1、数组的应用 第二:链表 1、链表操作 2、链表的应用 第三:堆栈 1、堆栈操作 2、堆栈的应用 第四:队列 1、队列操作 2、队列的应用 第五:哈希表 1、哈希函数 2、哈希表的应用 第六&#…...

vue 修改当前路由参数并刷新界面
项目中经常用到的需求是在当前页面修改路由中的参数,并刷新页面。 我们只用this. r o u t e r . r e p l a c e 或者 t h i s . router.replace或者this. router.replace或者this.router.go是不行的,需配合下面的代码 方法一: this.$router.…...

视频处理之视频抽帧的python脚本
在计算机视觉研究中,处理视频的时候,往往需要将视频抽帧成图片。如果多个视频都存放在一个文件夹里,并且希望抽帧出来的图片,以一个视频对应一个文件夹的形式存放,可以用以下代码,抽帧频率可自己手动修改&a…...

【youcans 的 OpenCV 学习课】22. Haar 级联分类器
专栏地址:『youcans 的图像处理学习课』 文章目录:『youcans 的图像处理学习课 - 总目录』 【youcans 的 OpenCV 学习课】22. Haar 级联分类器 3. Haar 特征及其加速计算3.1 Haar 特征3.2 Haar 特征值的计算3.3 积分图像3.4 基于积分图像加速计算 Haar 特…...

如何避免知识盲区 《人生处处是修行》 读书笔记
如何避免知识盲区 多元化学习:不要只关注自己擅长的领域,应该尝试学习其他领域的知识,例如文学、艺术、科学等。 拓宽阅读:阅读不同领域的书籍、文章、博客等,可以帮助你了解更多的知识和观点。 参加培训和课程&…...

5月最新10款降AI神器实测:哪个能降知网维普AI率,从99.5%降至3.8%可信吗?
2025 年 12 月 25 日知网 AIGC 检测系统升级,2026 年 4 月 27 日维普 AI 率检测平台升级…2026 毕业季,各大主流 AIGC 检测软件陆续升级系统,识别 AI 痕迹更加精准。 临近毕业,同学们看者飘红的 AIGC 检测报告、纷繁复杂的降 AI 系…...

Windows键盘终极改造指南:用SharpKeys解锁键盘隐藏潜力
Windows键盘终极改造指南:用SharpKeys解锁键盘隐藏潜力 【免费下载链接】sharpkeys SharpKeys is a utility that manages a Registry key that allows Windows to remap one key to any other key. 项目地址: https://gitcode.com/gh_mirrors/sh/sharpkeys …...

别再用土办法改论文了!书匠策AI官网www.shujiangce.com才是2025届毕业生的“通关密码“
你有没有经历过这种崩溃瞬间? 凌晨两点,你对着电脑屏幕,查重率39%,AIGC疑似率67%。导师发来一条消息:"这篇不像你写的,重写。" 那一刻,你是不是特别想问一句:我到底该怎…...

Sub-Zero性能优化:7个技巧让你的Plex字幕运行如飞
Sub-Zero性能优化:7个技巧让你的Plex字幕运行如飞 【免费下载链接】Sub-Zero.bundle Subtitles for Plex, as good you would expect them to be. 项目地址: https://gitcode.com/gh_mirrors/su/Sub-Zero.bundle Sub-Zero是Plex媒体服务器最强大的字幕插件之…...

抖音内容高效管理方案:批量下载与智能文件组织
抖音内容高效管理方案:批量下载与智能文件组织 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support. 抖音…...

Stylis完全指南:掌握CSS嵌套、前缀和压缩的终极教程
Stylis完全指南:掌握CSS嵌套、前缀和压缩的终极教程 【免费下载链接】stylis light – weight css preprocessor 项目地址: https://gitcode.com/gh_mirrors/st/stylis Stylis是一款轻量级CSS预处理器,专注于提供高效的CSS嵌套、自动前缀添加和代…...

中国的“链主企业“到底是什么?上游销售员和采购方各应该怎么用它
如果你最近一两年在政策文件、地方政府工作报告、招商口径里反复看到"链主企业"“链长制”"产业链龙头"这一串词,你不是错觉——这是从工信部到国资委、从中央到省市,这两三年最常见的一组高频词。但它不是一个纯政策口号:对一线的上游销售员,"链主&q…...

RTA-OS任务实战:从AUTOSAR规范到嵌入式汽车软件调度
1. 项目概述与核心价值在嵌入式汽车软件开发领域,AUTOSAR标准已经成为了事实上的行业规范,它定义了从应用软件到基础软件的完整架构。在这个庞大的体系中,操作系统(OS)作为最底层、最核心的软件组件之一,负…...

全志V853开发环境搭建指南:从Ubuntu配置到SDK编译全流程
1. 项目概述:从零开始构建一个V853开发环境拿到一块全志V853开发板,第一件事是什么?不是急着写代码,也不是马上烧录固件,而是把整个编译环境给搭起来。这听起来像是基础操作,但恰恰是很多新手,甚…...

铜钟音乐平台完整指南:三步打造纯净无干扰的听歌体验
铜钟音乐平台完整指南:三步打造纯净无干扰的听歌体验 【免费下载链接】tonzhon-music 铜钟 Tonzhon (tonzhon.whamon.com): 干净纯粹的音乐平台 (铜钟已不再使用 tonzhon.com,现在的 tonzhon.com 不是正版的铜钟) 项目地址: https://gitcode.com/GitHu…...