【STM32】STM32使用RFID读卡器
STM32使用RFID读卡器
RFID卡片
-
ID卡(身份标识):作用就是比如你要输入学号,你刷卡直接就相当于输入学号,省去了输入的过程
-
IC卡:集成电路卡,是将一种微电子芯片嵌入卡片之中
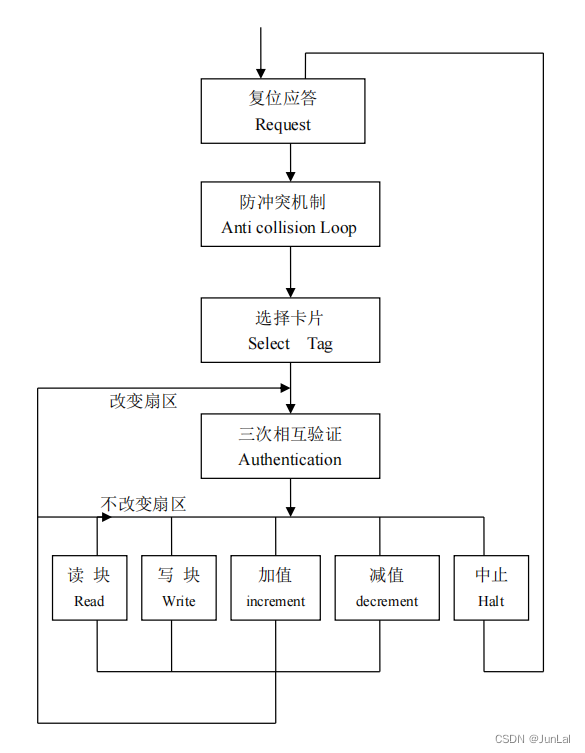
RFID的操作
1、初始化
(1)请求卡—寻找附近所有信号的卡
(2)防碰撞—选择一张信号最强的卡(得到卡的ID)
(3)选卡—选择一张要通信的卡
(4)密钥验证—验证身份
(5)读写卡片—数据读写

2、接线引脚表
| RFID | STM32 |
|---|---|
| SDA | PA4(SPI1_NSS) |
| SCK | PA5(SPI1_SCK) |
| MOSI | PA7(SPI1_MOSI) |
| MISO | PA6(SPI1_MISO) |
| IRQ | 悬空 |
| GND | GND |
| RST | PA12 |
| 3V3 | 3.3v |
3、代码
厂家给的测试代码改写
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "mfrc522.h"
#include "ZigBee.h"
#include "relay.h"#define MAXRLEN 18void MFRC522_Init(void) {GPIO_InitTypeDef GPIO_InitStructure;/* Enable the GPIO Clock */RCC_APB2PeriphClockCmd(MF522_RST_CLK, ENABLE);/* Configure the GPIO pin */GPIO_InitStructure.GPIO_Pin = MF522_RST_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;GPIO_Init(MF522_RST_PORT, &GPIO_InitStructure);/* Enable the GPIO Clock */RCC_APB2PeriphClockCmd(MF522_MISO_CLK, ENABLE);/* Configure the GPIO pin */GPIO_InitStructure.GPIO_Pin = MF522_MISO_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;GPIO_Init(MF522_MISO_PORT, &GPIO_InitStructure);/* Enable the GPIO Clock */RCC_APB2PeriphClockCmd(MF522_MOSI_CLK, ENABLE);/* Configure the GPIO pin */GPIO_InitStructure.GPIO_Pin = MF522_MOSI_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;GPIO_Init(MF522_MOSI_PORT, &GPIO_InitStructure);/* Enable the GPIO Clock */RCC_APB2PeriphClockCmd(MF522_SCK_CLK, ENABLE);/* Configure the GPIO pin */GPIO_InitStructure.GPIO_Pin = MF522_SCK_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;GPIO_Init(MF522_SCK_PORT, &GPIO_InitStructure);/* Enable the GPIO Clock */RCC_APB2PeriphClockCmd(MF522_NSS_CLK, ENABLE);/* Configure the GPIO pin */GPIO_InitStructure.GPIO_Pin = MF522_NSS_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;GPIO_Init(MF522_NSS_PORT, &GPIO_InitStructure);/* Enable the GPIO Clock */RCC_APB2PeriphClockCmd(LED_CLK, ENABLE);PcdReset();PcdAntennaOn();
}/
//功 能:寻卡
//参数说明: req_code[IN]:寻卡方式
// 0x52 = 寻感应区内所有符合14443A标准的卡
// 0x26 = 寻未进入休眠状态的卡
// pTagType[OUT]:卡片类型代码
// 0x4400 = Mifare_UltraLight
// 0x0400 = Mifare_One(S50)
// 0x0200 = Mifare_One(S70)
// 0x0800 = Mifare_Pro(X)
// 0x4403 = Mifare_DESFire
//返 回: 成功返回MI_OK
/
char PcdRequest(unsigned char req_code,unsigned char *pTagType)
{char status; unsigned int unLen;unsigned char ucComMF522Buf[MAXRLEN];
// unsigned char xTest ;ClearBitMask(Status2Reg,0x08);WriteRawRC(BitFramingReg,0x07);// xTest = ReadRawRC(BitFramingReg);
// if(xTest == 0x07 )// { LED_GREEN =0 ;}// else {LED_GREEN =1 ;while(1){}}SetBitMask(TxControlReg,0x03);ucComMF522Buf[0] = req_code;status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,1,ucComMF522Buf,&unLen);
// if(status == MI_OK )
// { LED_GREEN =0 ;}
// else {LED_GREEN =1 ;}if ((status == MI_OK) && (unLen == 0x10)){ *pTagType = ucComMF522Buf[0];*(pTagType+1) = ucComMF522Buf[1];}else{ status = MI_ERR; }return status;
}/
//功 能:防冲撞
//参数说明: pSnr[OUT]:卡片序列号,4字节
//返 回: 成功返回MI_OK
/
char PcdAnticoll(unsigned char *pSnr)
{char status;unsigned char i,snr_check=0;unsigned int unLen;unsigned char ucComMF522Buf[MAXRLEN]; ClearBitMask(Status2Reg,0x08);WriteRawRC(BitFramingReg,0x00);ClearBitMask(CollReg,0x80);ucComMF522Buf[0] = PICC_ANTICOLL1;ucComMF522Buf[1] = 0x20;status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,2,ucComMF522Buf,&unLen);if (status == MI_OK){for (i=0; i<4; i++){ *(pSnr+i) = ucComMF522Buf[i];snr_check ^= ucComMF522Buf[i];}if (snr_check != ucComMF522Buf[i]){ status = MI_ERR; }}SetBitMask(CollReg,0x80);return status;
}/
//功 能:选定卡片
//参数说明: pSnr[IN]:卡片序列号,4字节
//返 回: 成功返回MI_OK
/
char PcdSelect(unsigned char *pSnr)
{char status;unsigned char i;unsigned int unLen;unsigned char ucComMF522Buf[MAXRLEN]; ucComMF522Buf[0] = PICC_ANTICOLL1;ucComMF522Buf[1] = 0x70;ucComMF522Buf[6] = 0;for (i=0; i<4; i++){ucComMF522Buf[i+2] = *(pSnr+i);ucComMF522Buf[6] ^= *(pSnr+i);}CalulateCRC(ucComMF522Buf,7,&ucComMF522Buf[7]);ClearBitMask(Status2Reg,0x08);status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,9,ucComMF522Buf,&unLen);if ((status == MI_OK) && (unLen == 0x18)){ status = MI_OK; }else{ status = MI_ERR; }return status;
}/
//功 能:验证卡片密码
//参数说明: auth_mode[IN]: 密码验证模式
// 0x60 = 验证A密钥
// 0x61 = 验证B密钥
// addr[IN]:块地址
// pKey[IN]:密码
// pSnr[IN]:卡片序列号,4字节
//返 回: 成功返回MI_OK
/
char PcdAuthState(unsigned char auth_mode,unsigned char addr,unsigned char *pKey,unsigned char *pSnr)
{char status;unsigned int unLen;unsigned char i,ucComMF522Buf[MAXRLEN]; ucComMF522Buf[0] = auth_mode;ucComMF522Buf[1] = addr;for (i=0; i<6; i++){ ucComMF522Buf[i+2] = *(pKey+i); }for (i=0; i<6; i++){ ucComMF522Buf[i+8] = *(pSnr+i); }// memcpy(&ucComMF522Buf[2], pKey, 6); // memcpy(&ucComMF522Buf[8], pSnr, 4); status = PcdComMF522(PCD_AUTHENT,ucComMF522Buf,12,ucComMF522Buf,&unLen);if ((status != MI_OK) || (!(ReadRawRC(Status2Reg) & 0x08))){ status = MI_ERR; }return status;
}/
//功 能:读取M1卡一块数据
//参数说明: addr[IN]:块地址
// pData[OUT]:读出的数据,16字节
//返 回: 成功返回MI_OK
/
char PcdRead(unsigned char addr,unsigned char *pData)
{char status;unsigned int unLen;unsigned char i,ucComMF522Buf[MAXRLEN]; ucComMF522Buf[0] = PICC_READ;ucComMF522Buf[1] = addr;CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);if ((status == MI_OK) && (unLen == 0x90))// { memcpy(pData, ucComMF522Buf, 16); }{for (i=0; i<16; i++){ *(pData+i) = ucComMF522Buf[i]; }}else{ status = MI_ERR; }return status;
}/
//功 能:写数据到M1卡一块
//参数说明: addr[IN]:块地址
// pData[IN]:写入的数据,16字节
//返 回: 成功返回MI_OK
/
char PcdWrite(unsigned char addr,unsigned char *pData)
{char status;unsigned int unLen;unsigned char i,ucComMF522Buf[MAXRLEN]; ucComMF522Buf[0] = PICC_WRITE;ucComMF522Buf[1] = addr;CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);if ((status != MI_OK) || (unLen != 4) || ((ucComMF522Buf[0] & 0x0F) != 0x0A)){ status = MI_ERR; }if (status == MI_OK){//memcpy(ucComMF522Buf, pData, 16);for (i=0; i<16; i++){ ucComMF522Buf[i] = *(pData+i); }CalulateCRC(ucComMF522Buf,16,&ucComMF522Buf[16]);status = PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,18,ucComMF522Buf,&unLen);if ((status != MI_OK) || (unLen != 4) || ((ucComMF522Buf[0] & 0x0F) != 0x0A)){ status = MI_ERR; }}return status;
}/
//功 能:命令卡片进入休眠状态
//返 回: 成功返回MI_OK
/
char PcdHalt(void)
{unsigned int unLen;unsigned char ucComMF522Buf[MAXRLEN]; ucComMF522Buf[0] = PICC_HALT;ucComMF522Buf[1] = 0;CalulateCRC(ucComMF522Buf,2,&ucComMF522Buf[2]);PcdComMF522(PCD_TRANSCEIVE,ucComMF522Buf,4,ucComMF522Buf,&unLen);return MI_OK;
}/
//用MF522计算CRC16函数
/
void CalulateCRC(unsigned char *pIndata,unsigned char len,unsigned char *pOutData)
{unsigned char i,n;ClearBitMask(DivIrqReg,0x04);WriteRawRC(CommandReg,PCD_IDLE);SetBitMask(FIFOLevelReg,0x80);for (i=0; i<len; i++){ WriteRawRC(FIFODataReg, *(pIndata+i)); }WriteRawRC(CommandReg, PCD_CALCCRC);i = 0xFF;do {n = ReadRawRC(DivIrqReg);i--;}while ((i!=0) && !(n&0x04));pOutData[0] = ReadRawRC(CRCResultRegL);pOutData[1] = ReadRawRC(CRCResultRegM);
}/
//功 能:复位RC522
//返 回: 成功返回MI_OK
/
char PcdReset(void)
{RST_H;delay_10ms(1);RST_L;delay_10ms(1);RST_H;delay_10ms(10);// if(ReadRawRC(0x02) == 0x80)
// {
// LED_ON;
// delay_10ms(10);
// LED_OFF;
// delay_10ms(10);
// LED_ON;
// delay_10ms(10);
// LED_OFF;
// delay_10ms(10);
// }WriteRawRC(CommandReg,PCD_RESETPHASE);WriteRawRC(ModeReg,0x3D); //和Mifare卡通讯,CRC初始值0x6363WriteRawRC(TReloadRegL,30); WriteRawRC(TReloadRegH,0);WriteRawRC(TModeReg,0x8D);WriteRawRC(TPrescalerReg,0x3E);WriteRawRC(TxAutoReg,0x40); return MI_OK;
}
//
//设置RC632的工作方式
//
char M500PcdConfigISOType(unsigned char type)
{if (type == 'A') //ISO14443_A{ ClearBitMask(Status2Reg,0x08);/* WriteRawRC(CommandReg,0x20); //as default WriteRawRC(ComIEnReg,0x80); //as defaultWriteRawRC(DivlEnReg,0x0); //as defaultWriteRawRC(ComIrqReg,0x04); //as defaultWriteRawRC(DivIrqReg,0x0); //as defaultWriteRawRC(Status2Reg,0x0);//80 //trun off temperature sensorWriteRawRC(WaterLevelReg,0x08); //as defaultWriteRawRC(ControlReg,0x20); //as defaultWriteRawRC(CollReg,0x80); //as default
*/WriteRawRC(ModeReg,0x3D);//3F
/* WriteRawRC(TxModeReg,0x0); //as default???WriteRawRC(RxModeReg,0x0); //as default???WriteRawRC(TxControlReg,0x80); //as default???WriteRawRC(TxSelReg,0x10); //as default???*/WriteRawRC(RxSelReg,0x86);//84// WriteRawRC(RxThresholdReg,0x84);//as default// WriteRawRC(DemodReg,0x4D); //as default// WriteRawRC(ModWidthReg,0x13);//26WriteRawRC(RFCfgReg,0x7F); //4F/* WriteRawRC(GsNReg,0x88); //as default???WriteRawRC(CWGsCfgReg,0x20); //as default???WriteRawRC(ModGsCfgReg,0x20); //as default???
*/WriteRawRC(TReloadRegL,30);//tmoLength);// TReloadVal = 'h6a =tmoLength(dec) WriteRawRC(TReloadRegH,0);WriteRawRC(TModeReg,0x8D);WriteRawRC(TPrescalerReg,0x3E);// PcdSetTmo(106);delay_10ms(1);PcdAntennaOn();}else{ return (char)-1; }return MI_OK;
}
/
//功 能:读RC632寄存器
//参数说明:Address[IN]:寄存器地址
//返 回:读出的值
/
unsigned char ReadRawRC(unsigned char Address)
{unsigned char i, ucAddr;unsigned char ucResult=0;NSS_L;ucAddr = ((Address<<1)&0x7E)|0x80;for(i=8;i>0;i--){SCK_L;if(ucAddr&0x80)MOSI_H;elseMOSI_L;SCK_H;ucAddr <<= 1;}for(i=8;i>0;i--){SCK_L;ucResult <<= 1;SCK_H;if(READ_MISO == 1)ucResult |= 1;}NSS_H;SCK_H;return ucResult;
}/
//功 能:写RC632寄存器
//参数说明:Address[IN]:寄存器地址
// value[IN]:写入的值
/
void WriteRawRC(unsigned char Address, unsigned char value)
{ unsigned char i, ucAddr;SCK_L;NSS_L;ucAddr = ((Address<<1)&0x7E);for(i=8;i>0;i--){if(ucAddr&0x80)MOSI_H;elseMOSI_L;SCK_H;ucAddr <<= 1;SCK_L;}for(i=8;i>0;i--){if(value&0x80)MOSI_H;elseMOSI_L;SCK_H;value <<= 1;SCK_L;}NSS_H;SCK_H;
}/
//功 能:置RC522寄存器位
//参数说明:reg[IN]:寄存器地址
// mask[IN]:置位值
/
void SetBitMask(unsigned char reg,unsigned char mask)
{char tmp = 0x0;tmp = ReadRawRC(reg);WriteRawRC(reg,tmp | mask); // set bit mask
}/
//功 能:清RC522寄存器位
//参数说明:reg[IN]:寄存器地址
// mask[IN]:清位值
/
void ClearBitMask(unsigned char reg,unsigned char mask)
{char tmp = 0x0;tmp = ReadRawRC(reg);WriteRawRC(reg, tmp & ~mask); // clear bit mask
} /
//功 能:通过RC522和ISO14443卡通讯
//参数说明:Command[IN]:RC522命令字
// pInData[IN]:通过RC522发送到卡片的数据
// InLenByte[IN]:发送数据的字节长度
// pOutData[OUT]:接收到的卡片返回数据
// *pOutLenBit[OUT]:返回数据的位长度
/
char PcdComMF522(unsigned char Command, unsigned char *pInData, unsigned char InLenByte,unsigned char *pOutData, unsigned int *pOutLenBit)
{char status = MI_ERR;unsigned char irqEn = 0x00;unsigned char waitFor = 0x00;unsigned char lastBits;unsigned char n;unsigned int i;switch (Command){case PCD_AUTHENT:irqEn = 0x12;waitFor = 0x10;break;case PCD_TRANSCEIVE:irqEn = 0x77;waitFor = 0x30;break;default:break;}WriteRawRC(ComIEnReg,irqEn|0x80);ClearBitMask(ComIrqReg,0x80);WriteRawRC(CommandReg,PCD_IDLE);SetBitMask(FIFOLevelReg,0x80);for (i=0; i<InLenByte; i++){ WriteRawRC(FIFODataReg, pInData[i]); }WriteRawRC(CommandReg, Command);if (Command == PCD_TRANSCEIVE){ SetBitMask(BitFramingReg,0x80); }// i = 600;//根据时钟频率调整,操作M1卡最大等待时间25msi = 2000;do {n = ReadRawRC(ComIrqReg);i--;}while ((i!=0) && !(n&0x01) && !(n&waitFor));ClearBitMask(BitFramingReg,0x80);if (i!=0){ if(!(ReadRawRC(ErrorReg)&0x1B)){status = MI_OK;if (n & irqEn & 0x01){ status = MI_NOTAGERR; }if (Command == PCD_TRANSCEIVE){n = ReadRawRC(FIFOLevelReg);lastBits = ReadRawRC(ControlReg) & 0x07;if (lastBits){ *pOutLenBit = (n-1)*8 + lastBits; }else{ *pOutLenBit = n*8; }if (n == 0){ n = 1; }if (n > MAXRLEN){ n = MAXRLEN; }for (i=0; i<n; i++){ pOutData[i] = ReadRawRC(FIFODataReg); }}}else{ status = MI_ERR; }}SetBitMask(ControlReg,0x80); // stop timer nowWriteRawRC(CommandReg,PCD_IDLE); return status;
}/
//开启天线
//每次启动或关闭天险发射之间应至少有1ms的间隔
/
void PcdAntennaOn()
{unsigned char i;i = ReadRawRC(TxControlReg);if (!(i & 0x03)){SetBitMask(TxControlReg, 0x03);}
}/
//关闭天线
/
void PcdAntennaOff()
{ClearBitMask(TxControlReg, 0x03);
}//等待卡离开
void WaitCardOff(void)
{char status;unsigned char TagType[2];while(1){status = PcdRequest(REQ_ALL, TagType);if(status){status = PcdRequest(REQ_ALL, TagType);if(status){status = PcdRequest(REQ_ALL, TagType);if(status){return;}}}delay_10ms(100);}
}void MFRC522_Judge(void) {char status;unsigned char snr, buf[16], TagType[2], SelectedSnr[4], DefaultKey[6] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF}; status= PcdRequest(REQ_ALL,TagType); // 寻卡if(!status){status = PcdAnticoll(SelectedSnr); // 防碰撞if(!status){status=PcdSelect(SelectedSnr); // 选卡if(!status){snr = 1; //扇区号1status = PcdAuthState(KEYA, (snr*4+3), DefaultKey, SelectedSnr);// 验证卡片密码 校验1扇区密码,密码位于每一扇区第3块{if(!status){status = PcdRead((snr*4+0), buf); // 读卡,读取1扇区0块数据到buf[0]-buf[16] //status = PcdWrite((snr*4+0), "12345678"); // 写卡,将buf[0]-buf[16]写入1扇区0块if(strcmp((char *)buf, "12345678") == 0){printf("\r\n密码正确... \r\n");}else {printf("\r\n密码错误... \r\n");}if(!status) WaitCardOff(); //等待卡离开}}}}} }
相关文章:
【STM32】STM32使用RFID读卡器
STM32使用RFID读卡器 RFID卡片 ID卡(身份标识):作用就是比如你要输入学号,你刷卡直接就相当于输入学号,省去了输入的过程 IC卡:集成电路卡,是将一种微电子芯片嵌入卡片之中 RFID的操作 1、…...
spring集成mybatis的原理
spring是怎样和mybatis继承的? 在idea里点mapper.queryOne()直接跳到了接口或xml,它究竟是怎样利用jdbc执行的? 我直接调用mapper.queryOne是怎么使用的sqlsession?怎么去connect的? mybatis是怎样根据mapper找到对应的…...
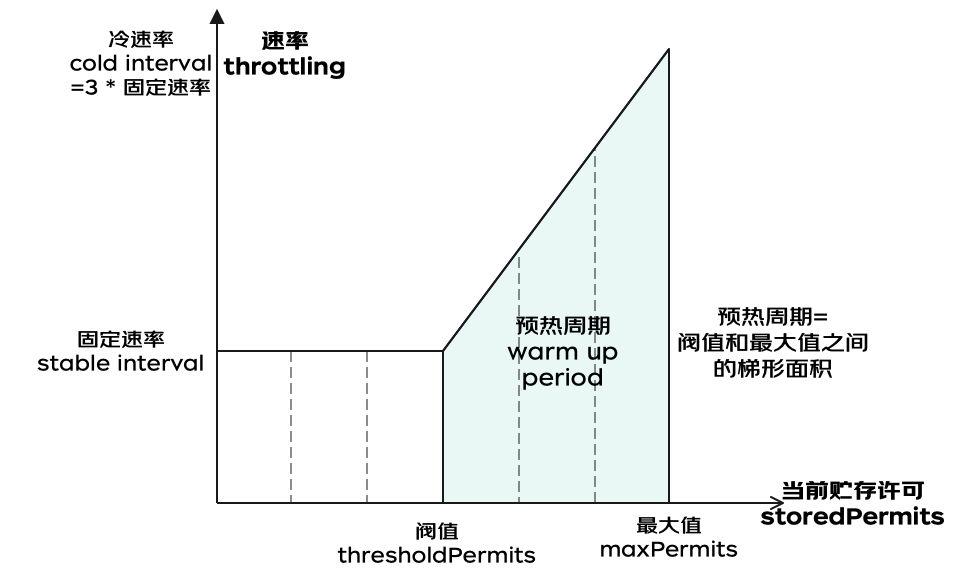
限速神器RateLimiter源码解析 | 京东云技术团队
作者:京东科技 李玉亮 目录指引 限流场景 软件系统中一般有两种场景会用到限流: •场景一、高并发的用户端场景。 尤其是C端系统,经常面对海量用户请求,如不做限流,遇到瞬间高并发的场景,则可能压垮系统…...

spring中怎样优化第三方bean?
需求:将数据库连接四要素提取到properties配置文件,spring来加载配置信息并使用这些信息来完成属性注入。第三方bean属性优化的思路如下: 1.在resources下创建一个jdbc.properties(文件的名称可以任意) 2.将数据库连接四要素配置到配置文件中 3.在Spr…...
8分钟的面试,我直呼太变态了......
干了两年外包,本来想出来正儿八经找个互联网公司上班,没想到算法死在另一家厂子。 自从加入这家外包公司,每天都在加班,钱倒是给的不少,所以也就忍了。没想到11月一纸通知,所有人不许加班,薪资…...

别去外包,干了3年,彻底废了......
先说一下自己的情况。大专生,19年通过校招进入湖南某软件公司,干了接近3年的测试,今年年上旬,感觉自己不能够在这样下去了,长时间呆在一个舒适的环境会让一个人堕落!而我已经在一个企业干了三年,…...
ipa如何安装到iphone
这里以目前很火的奥普appuploader为例,先打开 appuploader,把 iPhone 用原装数据线连接,点击左侧的 appuploader一栏,会在右窗格中看到机器的相关信息,可以看到是否越狱一栏显示“是”。 接下来请点击左侧的“程序库”…...
照片从安卓手机中消失了?让他们恢复回来的几个方法请收好
“我安卓上的所有照片都消失了,我的照片去哪儿了” “我安卓上的所有照片都不见了” “下载的图片从安卓上消失了” …… 您是否遇到类似的问题?导致Android手机照片丢失的原因有很多,例如软件更新、误删、误操作、系统崩溃、应用程序崩溃、…...
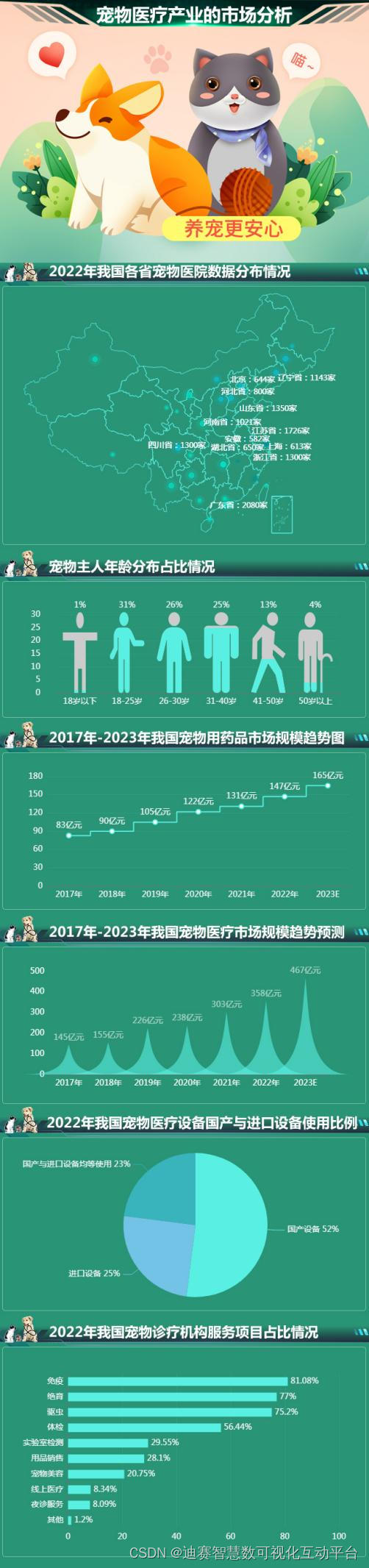
哪个年龄段人群喜欢养宠物?18-25岁占比最高,达31%
上一期,我们通过可视化互动平台分析了萌宠经济下宠物食品的发展现状,这一期我们接着来分析一下,在萌宠经济下,我国宠物医疗产业的市场情况。 由于现在很多家庭都喜欢饲养宠物,宠物数量的快速增长从而拉动了宠物经济的…...

使用Apache POI数据导出及EasyExcel进行十万、百万的数据导出
文章目录 Apache POI使用 EasyExcel工具类easyExcel工具类poi Apache POI Apache POI 是基于 Office Open XML 标准( OOXML )和 Microsoft 的 OLE 2 复合⽂档 格式( OLE2 )处理各种⽂件格式的开源项⽬。 简⽽⾔之,您可…...

八种故障排障思路
目录 生产故障有哪些 1、网络故障 如何发现网络故障 如何排查网络故障 如何解决网络故障 2、服务器故障如何处理 如何发现服务器故障 如何排查服务器故障 如何解决服务器故障 3、数据库故障如何处理 如何发现数据库故障 如何排查数据库故障 如何解决数据库故障 4…...
JavaScript全解析——this指向
本系列内容为JS全解析,为千锋教育资深前端老师独家创作 致力于为大家讲解清晰JavaScript相关知识点,含有丰富的代码案例及讲解。如果感觉对大家有帮助的话,可以【点个关注】持续追更~ this指向(掌握) this 是一个关…...

MySQL中ON DUPLICATE KEY UPDATE和REPLACE INTO区别
MySQL中的ON DUPLICATE KEY UPDATE和REPLACE INTO区别 在MySQL中,当我们需要插入新的数据到一个已存在的表中时,有两个常见的选项:ON DUPLICATE KEY UPDATE和REPLACE INTO。这两个选项可以解决类似的问题,但在处理重复键…...

37本国产SCI期刊推荐!涵盖9大领域,建议收藏!②
三、地学类 1. Acta Oceanologica Sinica | 国产之光!影响因子1分,中科院2区,国人占比81%! 评语:Acta Oceanologica Sinica在海洋学领域处于中等水平,影响因子逐年上升。近年来我国倡导发表国内期刊的论文…...

掌握无缝云迁移方法的数据集成
随着越来越多的组织过渡到基于云的基础架构,数据集成已成为云迁移过程的关键组成部分。数据集成包括将来自不同来源的数据集成到一个整合的视角中。云迁移的上下文涉及将数据从本地系统传输到基于云的平台,同时确保数据的一致性、准确性和可用性。 本文…...
unity 3种办法实现血条效果并实现3d世界血条一直看向摄像机
普通血条栏: 渐变色血条栏: 缓冲血条栏: 3D场景血条栏跟随玩家移动: 普通血条栏: 在Canvas下创建一个空物体HP bar,在空物体下方创建3个Image,分别为血条框bar 黑色,最大HP maxHP 白色,和当前HP currentHP 红色。(PS:注意先后顺序以调整显示的图层) 效果: …...

Jenkins流水线整合k8s实现代码自动集成和部署
一、前置条件 1、安装好k8s集群 这里先要搭建好一个K8s集群,笔者这边就采用使用了一个一主一丛的k8s集群,k8s集群的版本使用1.19.5版本,服务器的配置:2核4G,操作系统: CentOS Linux release 7.9.2009 (Core) 主机名…...

@PulsarConsumer注解2
PulsarConsumer注解是 Apache Pulsar 的客户端 API 中的注解之一,它是用于自动消费 Pulsar 消息的。通过使用PulsarConsumer注解,您可以将 Pulsar 消息的消费逻辑与自身的 bean 结合起来,并且不必编写繁琐的消费者代码。当消息到达 topic 时&…...
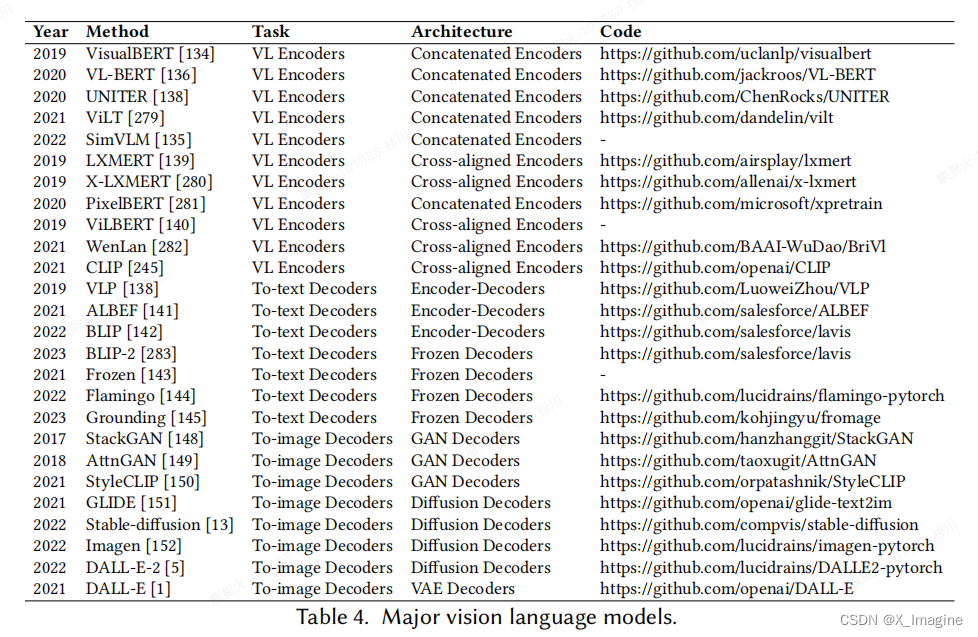
AIGC 综述 2023:A History of Generative AI from GAN to ChatGPT
GAI:发展历史,核心技术,应用领域以及未来发展 摘要1、引言1.1、主要贡献1.2、组织结构 2、生成式AI的发展历史2.1、NLP领域的发展2.2、CV领域的发展2.3、CV与NLP的融合 3、AIGC的核心技术基础3.1、经典基础模型3.1.1、Transformer3.1.2、Pre-…...

【JOSEF约瑟 JDZS-1202B 可调断电延时中间继电器 精度高、延时宽、】
品牌:JOSEF约瑟名称:可调断电延时中间继电器型号:JDZS-1202B系列额定电压:110、220VDC/AC触点容量:250V/5A功率消耗:2W返回系数:≥5%特点:高精度、延时宽、功耗低。 用途及特点 基本…...

Lampiao 靶场
Lampiao 靶场完整渗透解析一、靶场环境信息攻击机(Kali)IP:192.168.146.128靶机 IP:192.168.146.129目标:获取靶机 root 权限与 flag二、步骤 1:信息收集(端口与服务扫描)nmap -p- -…...

科华UPS电源全品类汇总:选型与场景适配指南
科华UPS电源作为国内智慧电能领域的主流产品,覆盖家用、办公、机房、工业等全场景,产品系列丰富、规格齐全,但多数用户在选型时,常因分不清系列差异、功率适配、架构类型而踩坑。本文系统汇总科华UPS电源的核心分类、主流系列、核…...

Unity iOS构建报错SDK version is 0的根因与精准修复
1. 这个报错不是Unity在“发脾气”,而是工程配置在“装死”刚接手一个老项目,打开Unity编辑器,点Build Settings准备打包iOS,结果弹出一行红字:“SDK version is 0, cannot build”。我第一反应是——这什么鬼…...

具身智能:面向新兴交叉学科建设的思考与建议 2026
这份由 CCF YOCSEF 长三角五地学术委员会 2026 年 5 月发布的白皮书,聚焦具身智能作为新兴交叉学科的建设,明确其并非 AI 与机器人学的简单拼接,而是围绕物理交互中的智能行为形成的新问题域,提出 “三大基本问题 一个应用需求”…...

别再只比参数了!从插件生态到中文优化,聊聊ChatGPT和文心一言的“隐形”差异
超越参数之争:ChatGPT与文心一言的生态与本土化实战解析 当技术评测文章还在反复比较模型参数量与发布时间时,真正影响日常工作效率的往往是那些未被量化的"软实力"。本文将从插件生态构建与中文场景优化两个维度,带您重新认识这两…...

微信红包助手终极指南:无需ROOT的智能抢红包解决方案
微信红包助手终极指南:无需ROOT的智能抢红包解决方案 【免费下载链接】WeChatLuckyMoney :money_with_wings: WeChats lucky money helper (微信抢红包插件) by Zhongyi Tong. An Android app that helps you snatch red packets in WeChat groups. 项目地址: ht…...

安卓用户如何免费获取大模型API密钥并开始调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 安卓用户如何免费获取大模型API密钥并开始调用 对于安卓开发者或移动端技术爱好者而言,直接体验和调用多种大模型的能力…...
3步高效解决TranslucentTB任务栏透明化难题:完整配置指南
3步高效解决TranslucentTB任务栏透明化难题:完整配置指南 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB 你是否厌倦了Window…...
)
【独家首发】国内23家AI语音服务商最新报价数据库(含教育/医疗/金融行业专属折扣码及最小起订量红线)
更多请点击: https://kaifayun.com 第一章:AI语音合成价格与性价比分析 AI语音合成(TTS)服务的定价模式日益多样化,从按字符/音频时长计费到订阅制、API调用包、企业定制方案并存。理解不同服务商的成本结构与实际输出…...

免费解锁八大网盘限速!LinkSwift直链下载助手终极指南
免费解锁八大网盘限速!LinkSwift直链下载助手终极指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼…...