【云原生|Kubernetes】05-Pod的存储卷(Volume)
【云原生Kubernetes】05-Pod的存储卷(Volume)
文章目录
- 【云原生Kubernetes】05-Pod的存储卷(Volume)
- 简介
- Volume类型解析
- emptyDir
- HostPath
- gcePersistentDisk
- NFS
- iscsi
- glusterfs
- ceph
- 其他volume
简介
- Volume 是Pod 中能够被多个容器访问的共享目录。 Kubernetes 中的Volume 概念、用 途和目的与 Docke 中的 Vo lume 比较类似,但二者不能等价, 首先 Kubernetes 中的Volume 被定义在 Pod上 ,被一个 Pod 里的多个容器挂载到具体的文件目录 ;其次, Kubernete 中的 Volume与 Pod 的生命周期相同,但与容器的生命周期不相关, 当容器终止或者重启,volume 中的数据也不会丢失;最后, Kubemetes 支持多种类型的 Volume ,例如 GlusterFS Ceph 等分布式文件系.
Volume类型解析
kubernetes提供了非常丰富的Volume类型供容器使用,例如emptyDir(临时目录);宿主机目录(hostpath),共享存储(NFS,glusterfs等),下面将对常见的类型进行说明:
emptyDir
emptyDir是在Pod分配到node时创建的,从它的名称就可以看出,它的初始内容为空,并且必须指定宿主机上对应的目录文件,因为这是Kubernetes自动分配的一个目录,当Pod从Node上移除时,emptyDir中的数据也将被永久删除。emptyDir的一些用途如下:
临时空间,例如用于某些应用程序运行时所需的临时目录,且无需永久保留;
长时间任务执行过程中使用的临时目录;
一个容器需要从另一个容器中获取数据的目录(多容器共享目录)
在默认情况下,emptyDir使用的是节点存储介质,例如磁盘或者网络存储,还可以使用emptyDir.medium属性,把这个属性设置为“Memory”,就可以使用更快的基于内存的后端存储了。需要注意的是,这种情况下的emptyDir使用的内存会被计入容器的内存消耗,将受到资源限制和配额的管理。
示例
- 在pod中创建两个容器:tomcat和busybox,在pod级别设置名为‘app-logs’的volume,用于tomcat容器向其中写日志文件,busybox容器从中读取日志文件。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-iJwiIjjH-1684847247245)(D:\学习\学习笔记\图片\110.png)]](https://img-blog.csdnimg.cn/07c8baacaf9d43bc8ff06dc5716efa74.png)
apiVersion: v1
kind: Pod
metadata:name: volume-podspec:containers:- name: tomcat-containerimage: tomcatports:- containerPort: 8080volumeMounts:- name: app-logsmountPath: /usr/loacl/tomcat/logs- name: busybox-containerimage: busyboxcommand: ["sh", "-c", "tail -f /logs/catalins*.log"]volumeMounts:- name: app-logsmountPath: /logsvolumes:- name: app-logsemptyDir: {}
- 查看pod的详细信息
kubectl describe pods volume-pod
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-d0cLlGp0-1684847247246)(D:\学习\学习笔记\图片\111.png)]](https://img-blog.csdnimg.cn/c3c76a65d3ae4360bc4345041ec66048.png)
HostPath
- hostpath为在Pod上挂载宿主机的文件或目录,通常可以用于以下几个方面:
- 在容器应用程序生成的日志文件需要永久保存时,可以使用宿主机的高速文件系统对其存储;
- 需要访问宿主机上的Docker引擎内部数据结构的容器应用时,可以通过定义hostPath为宿主机/var/lib/docker目录,使容器内部的应用可以直接访问docker的文件系统。
- 在使用这种类型的Volume时,需要注意以下几点:
- 在不同的Node上具有相同配置的Pod,可能会因为宿主机上的 目录和文件不同而导致对Volume上目录和文件的访问结果不一致。
- 目录和文件路径不同:不同节点上的宿主机可能具有不同的目录和文件路径,这意味着在不同节点上运行的 Pod 访问 HostPath 卷上的目录和文件时,可能会得到不同的结果。例如,在一个节点上,HostPath 卷可能映射到
/mnt/data目录,而在另一个节点上,它可能映射到/data目录。- 目录和文件权限不同:不同节点上的宿主机可能具有不同的文件权限,这意味着在不同节点上运行的 Pod 访问 HostPath 卷上的目录和文件时可能需要不同的权限。
- 如果使用了资源配额管理,则Kubernetes无法将hostPath在宿主 机上使用的资源纳入管理。
示例
- 在pod中创建一个容器:tomcat,在pod级别设置名为‘app-logs1’的volume,将本地/var/log目录挂载到pod的/data/log1下
apiVersion: v1
kind: Pod
metadata:name: volume-pod1spec:containers:- name: tomcat-container1image: tomcatports:- containerPort: 8080volumeMounts:- name: app-logs1mountPath: /data/log1volumes:- name: app-logs1hostPath:path: /var/logtype: Directory
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-Jy3WDtfL-1684847247247)(D:\学习\学习笔记\图片\112.png)]](https://img-blog.csdnimg.cn/1beafa672366419388be85133319fb77.png)
gcePersistentDisk
gcePersistentDisk是Google Cloud Platform(GCP)提供的一种持久性磁盘存储。它是一种网络附加的块存储解决方案,为在Google Compute Engine上运行的虚拟机实例提供耐用且高性能的存储。
gcePersistentDisk具有多种优点,包括:
- 耐久性:存储在gcePersistentDisk上的数据在多个物理磁盘和计算机上进行复制,确保高耐用性和可用性。
- 性能:gcePersistentDisk提供高性能存储,具有实现高读写速度的能力。
- 可扩展性:gcePersistentDisk可以轻松调整大小,以满足不断变化的存储需求,无需停机。
- 兼容性:gcePersistentDisk可以与在Google Compute Engine上运行的各种虚拟机实例一起使用,使其成为一种灵活的存储解决方案。
使用gcePersistentDisk时有以下一些限制条件:
- Node(运行kubelet的节点)需要是GCE虚拟机。
- 这些虚拟机需要与PD存在于相同的GCE项目和Zone中。
示例
- Pod中有一个名为“my-container”的容器,它使用了一个名为“my-volume”的卷,将gcePersistentDisk挂载到了容器的“/mnt/data”目录下。同时,在Pod的“volumes”字段中定义了一个名为“my-volume”的卷,并指定了使用名为“my-disk”的gcePersistentDisk,并将文件系统类型设置为“ext4”
apiVersion: v1
kind: Pod
metadata:name: my-pod
spec:containers:- name: my-containerimage: nginxvolumeMounts:- name: my-volumemountPath: /mnt/datavolumes:- name: my-volumegcePersistentDisk:pdName: my-diskfsType: ext4
NFS
- NFS(Network File System)是一种分布式文件系统协议,用于在网络上共享文件和目录。它允许多个计算机共享相同的文件系统,从而使多个计算机可以访问相同的文件和数据。
示例
- Pod 中有一个名为“tomcat-container3”的容器,它使用了一个名为“ nfs-volume”的卷,将 NFS 挂载到了容器的“/nfs”目录下。同时,在 Pod 的“volumes”字段中定义了一个名为“nfs-volume”的卷,并指定了使用 NFS,指定 NFS 服务器的地址为“192.168.194.134”,共享路径为"/data"”
Kubernetes 节点上需要安装nfs-util客户端
apiVersion: v1
kind: Pod
metadata:name: nfs-podspec:containers:- name: tomcat-container3image: tomcatimagePullPolicy: IfNotPresentports:- name: tomcat-portcontainerPort: 8080volumeMounts:- name: nfs-volumemountPath: /nfsvolumes:- name: nfs-volumenfs:server: 192.168.194.134path: /data![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-NJfLxhis-1684847247248)(D:\学习\学习笔记\图片\113.png)]](https://img-blog.csdnimg.cn/83168afebceb4cb19c9397ea973f033d.png)
iscsi
- iSCSI(Internet Small Computer System Interface)是一种基于TCP/IP的存储协议,用于在计算机网络上共享块存储设备。它允许远程计算机(即iSCSI客户端)通过网络连接访问存储设备(即iSCSI存储设备),就像它们是直接连接在本地计算机上的一样。
- 在Kubernetes中,可以将iSCSI存储设备挂载到Pod中,以为Pod提供持久性的块存储。
示例
- me”的卷,将 iSCSI 存储设备挂载到了容器的“/mnt/data”目录下。同时,在 Pod 的“volumes”字段中定义了一个名为“my-volume”的卷,并指定了使用 iSCSI,指定 iSCSI 目标地址为“192.168.1.100:3260”,iSCSI 名称为“iqn.2022-05.com.example:storage.target01”,逻辑单元号为“0”,文件系统类型为“ext4”,只读模式为“false”。
需要在 Kubernetes 节点上安装 iSCSI 客户端软件
apiVersion: v1
kind: Pod
metadata:name: my-pod
spec:containers:- name: my-containerimage: nginxvolumeMounts:- name: my-volumemountPath: /mnt/datavolumes:- name: my-volumeiscsi:targetPortal: 192.168.1.100:3260iqn: iqn.2022-05.com.example:storage.target01lun: 0fsType: ext4readOnly: false
glusterfs
GlusterFS是一种开源的分布式文件系统,用于在计算机网络上共享文件和目录。它是一种基于用户空间的文件系统,可以在多个服务器之间创建一个可扩展的、高可用性的存储池,从而提供高性能、可靠的存储解决方案。
GlusterFS可以通过将多个存储节点组合成一个存储池来扩展存储容量。每个存储节点都运行一个GlusterFS客户端,用于将本地存储设备映射到存储池中。这样,多个存储节点就可以共享相同的文件系统,并提供高可用性和容错性。
s示例
- Pod 中有一个名为“my-container”的容器,它使用了一个名为“my-volume”的卷,将 GlusterFS 文件系统挂载到了容器的“/mnt/data”目录下。同时,在 Pod 的“volumes”字段中定义了一个名为“my-volume”的卷,并指定了使用 GlusterFS,指定 GlusterFS 集群的地址为“glusterfs-cluster”,共享路径为“my-volume”,只读模式为“false”。
apiVersion: v1
kind: Pod
metadata:name: my-pod
spec:containers:- name: my-containerimage: nginxvolumeMounts:- name: my-volumemountPath: /mnt/datavolumes:- name: my-volumeglusterfs:endpoints: glusterfs-clusterpath: my-volumereadOnly: false
ceph
RBD(RADOS Block Device)是一种基于Ceph存储集群的块存储协议,用于在计算机网络上共享块存储设备。它允许远程计算机(即RBD客户端)通过网络连接访问存储设备(即RBD存储设备),就像它们是直接连接在本地计算机上的一样。
RBD协议的工作原理是将块设备映射到Ceph存储集群中的对象存储池,从而提供分布式、高可用性、高性能的块存储服务。RBD存储设备可以动态调整大小,并且可以在多个客户端之间共享。
示例
- Pod 中有一个名为“my-container”的容器,它使用了一个名为“my-volume”的卷,将 RBD 存储设备挂载到了容器的“/mnt/data”目录下。同时,在 Pod 的“volumes”字段中定义了一个名为“my-volume”的卷,并指定了使用 RBD,指定 Ceph 存储集群的监视器地址为“192.168.1.100:6789, 192.168.1.101:6789, 192.168.1.102:6789”,对象存储池为“rbd-pool”,镜像名称为“my-image”,用户名为“admin”,密钥文件为“/etc/ceph/keyring”,文件系统类型为“xfs”,只读模式为“false”。
apiVersion: v1
kind: Pod
metadata:name: my-pod
spec:containers:- name: my-containerimage: nginxvolumeMounts:- name: my-volumemountPath: /mnt/datavolumes:- name: my-volumerbd:monitors: [192.168.1.100:6789, 192.168.1.101:6789, 192.168.1.102:6789]pool: rbd-poolimage: my-imageuser: adminkeyring: /etc/ceph/keyringfsType: xfsreadOnly: false
其他volume
- **flocker:**使用Flocker管理存储卷;
- gitRepo: 通过挂载一个空目录,并从Git库clone一个git repository以供Pod使用;
- **secret:**一个Secret Volume用于为Pod提供加密的信息,你可以 将定义在Kubernetes中的Secret直接挂载为文件让Pod访问。Secret Volume是通过TMFS(内存文件系统)实现的,这种类型的Volume总是 不会被持久化的。
在上述中挂载外部存储,如ceph,gluster,nfs,iscsi等,的时候虽然pod可以直接进行挂载,但是kubernetes更加推荐我们先需要创建一个 PersistentVolume,并将其绑定到 PersistentVolumeClaim 上。然后,在 Pod 中使用该 PersistentVolumeClaim 来挂载。后面我们将会单独并且着重的介绍pv和pvc的功能和作用。
你可以 将定义在Kubernetes中的Secret直接挂载为文件让Pod访问。Secret Volume是通过TMFS(内存文件系统)实现的,这种类型的Volume总是 不会被持久化的。
相关文章:
【云原生|Kubernetes】05-Pod的存储卷(Volume)
【云原生Kubernetes】05-Pod的存储卷(Volume) 文章目录 【云原生Kubernetes】05-Pod的存储卷(Volume)简介Volume类型解析emptyDirHostPathgcePersistentDiskNFSiscsiglusterfsceph其他volume 简介 Volume 是Pod 中能够被多个容器访问的共享目录。 Kubern…...

Python实现数据结构
文章目录 一、Python实现数据结构1.1 python实现单向链表1.2 python实现单向循环链表1.3 python实现双向链表 一、Python实现数据结构 1.1 python实现单向链表 singleLinkedList.py class SingleNode:"""the node of single link list"""def …...
esp32CAM环境安装教程---串口驱动安装
前言 (1)本人安装好arduino 的ESP32环境之后, 发现一直下载不进去程序。一直说Cannot configure port, something went wrong. Original message: PermissionError。 (2)查阅了很多资料,用了各种办法&#…...

Java中List和Array转换
文章目录 List -> Array1. 调用toArray()方法直接返回一个Object[]数组:2. 给toArray(T[])传入一个类型相同的Array,List内部自动把元素复制到传入的Array中:3. 通过List接口定义的T[] toArray(IntFunction<T[]> generator)方法&…...

如何能确定数据库中root用户的密码是什么
如果您无法确定数据库中 root 用户的密码,有几种方法可以尝试找回或重置密码: 1. 使用已知密码:如果您有之前设置的 root 用户密码,可以使用该密码进行登录。 2. 查找密码文件:在某些情况下,MariaDB 可能…...
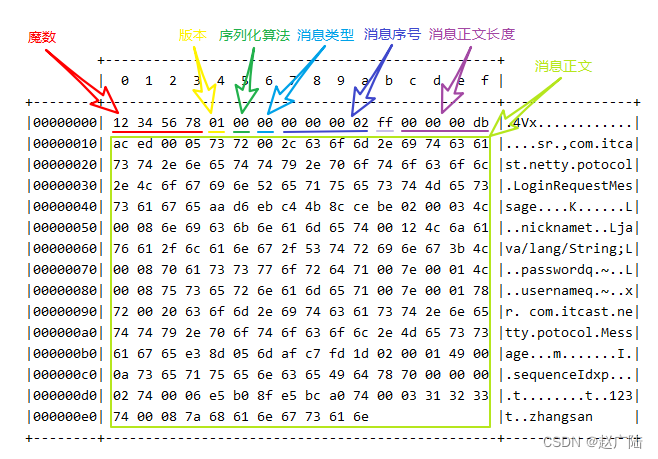
由浅入深Netty协议设计与解析
目录 1 为什么需要协议?2 redis 协议举例3 http 协议举例4 自定义协议要素4.1 编解码器4.2 什么时候可以加 Sharable 1 为什么需要协议? TCP/IP 中消息传输基于流的方式,没有边界。 协议的目的就是划定消息的边界,制定通信双方要…...
)
iptables防火墙(1)
iptables防火墙 一、iptables概述二、netfilter/iptables 关系三、四表五链1.四表2.五链 四、规则链之间的匹配顺序五、规则链内的匹配顺序六、iptables安装与配置七、常用的控制类型八、常用的管理选项九、规则命令1.添加新规则2.查看规则列表3.设置默认策略4.删除规则5.清空规…...

第九章 Productions最佳实践 - Productions开发的最佳实践
文章目录 第九章 Productions最佳实践 - Productions开发的最佳实践Productions开发的最佳实践项目目标项目交付文档 第九章 Productions最佳实践 - Productions开发的最佳实践 Productions开发的最佳实践 本章是一个总体概述,旨在帮助团队成员为从事生产项目做好…...

RocketMQ 怎么实现的消息负载均衡以及怎么能够保证消息被顺序消费
一、RocketMQ 怎么实现的消息负载均衡 RocketMQ是一种开源的分布式消息中间件,它使用了一种称为消息负载均衡的机制来实现消息的分发和消费的负载均衡。RocketMQ的消息负载均衡主要是通过以下两个方面实现的: 消息队列分组(Message Queue G…...
【随笔记】全志 T507 PF4 引脚无法被正常设置为中断模式的问题分析
相关信息 硬件平台:全志T507 系统版本:Android 10 / Linux 4.9.170 问题描述:PF4 无法通过标准接口设置为中断模式,而 PF1、PF2、PF3、PF5 正常可用。 分析过程 一开始以为是引脚被其它驱动占用引起,或者该引脚不具…...

人手一个 Midjourney,StableStudio 重磅开源!
人手一个 Midjourney,StableStudio 重磅开源! Stability AI 公司在上个月 19 号推出了 Alpha 版本 StableLM 大语言模型,包含了 30 亿和 70 亿参数,并且支持商用。如今他们再次推出了 AI 图像生成平台 StableStudio,这…...
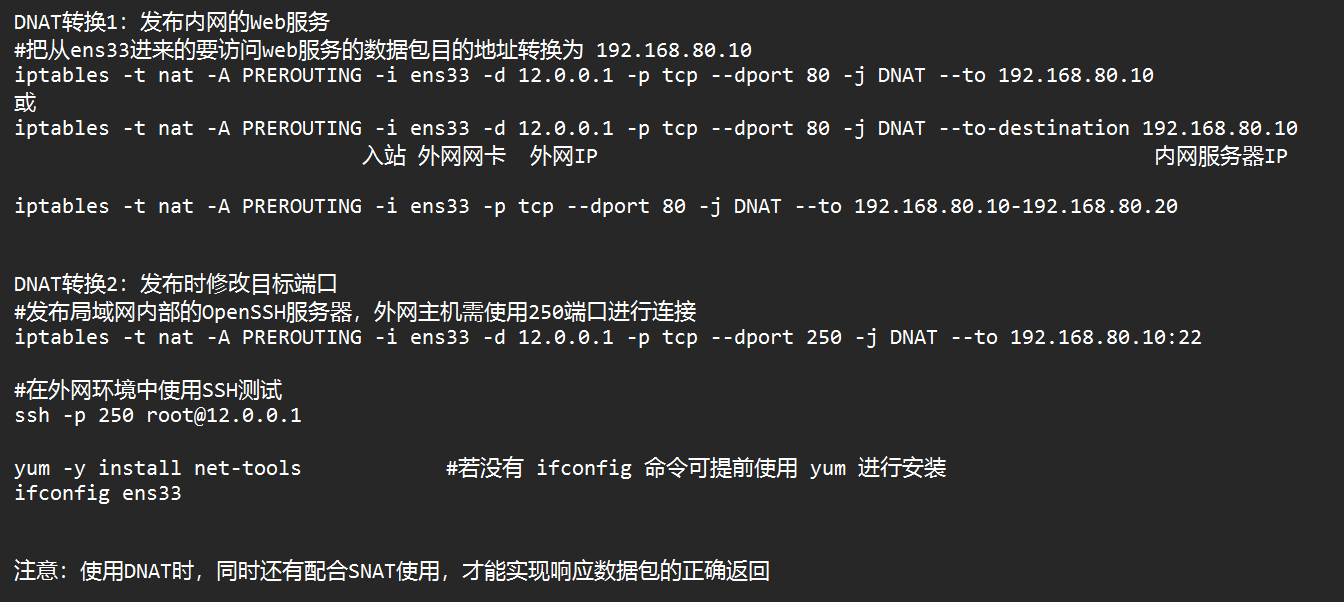
iptables防火墙(2)
iptables防火墙(2) 一、SNATSNAT应用环境SNAT原理SNAT转换前条件扩展 二、DNATDNAT应用环境DNAT原理DNAT转换前提条件扩展 三、防火墙规则的备份和还原导出(备份)所有表的规则导入(还原)规则 一、SNAT SNA…...

Windows和Kali上使用proxychains代理流量
Windows和Kali上使用proxychains代理流量 PS. 本文演示都是在kali进行的,如有出入还请联系我哦1. Linux(Debian)1.1. 检查一下是否有proxychains1.2 修改config文件 2. Linux(Debian)安装proxychians43. Windows3.1 下载3.2 配置 4. Windows下的配置5. 测试 PS. 写这…...
KEYSIGHT MSOS204A 2GHZ 4通道DSOS204A高清晰度示波器
KEYSIGHT是德DSOS204A/MSOS204A高清晰度示波器 附加功能: 2 GHz 带宽(可升级) 4 个模拟通道和 16 个数字通道 最大存储深度:800 Mpts(2 通道),400 Mpts(4 通道) 最大…...
最新Java适配商城系统
城前端功能展示 商城移动端 后端基于SpringBoot 研发,前端使用 Vue、uniapp开发 前后端分离,支持分布式部署,支持Docker,各个API独立,并且有独立的消费者 api不需要单独部署,只需启动一个jar包就可以正…...

【KVM虚拟化】· virsh管理命令
目录 🍁libvirt架构概述 🍁使用virsh管理虚拟机 🍂常用命令总结 🍁kvm基本功能管理 🍂帮助命令 🍂KVM的配置文件存放目录 🍂查看虚拟机状态 🍂虚拟机关机与开机 🍂强制虚…...
,有的话就过滤掉)
JS Es6中判断b数组对象是否有跟a数组对象相同的数值(例如:id),有的话就过滤掉
如下[数组]对象a和b let a[{id:1,value:this},{id:2,value:is}] let b[{id:1,value:hello},{id:3,value:world}]filter() 方法创建一个新的数组,新数组中的元素是通过检查指定数组中符合条件的所有元素。 some() 方法用于检测数组中的元素是否满足指定条件&#x…...

python获取某电商平台口红数据并制作词云
目录标题 前言开发环境:模块使用数据来源分析代码展示获取数据制作词云 尾语 💝 前言 嗨喽~大家好呀,这里是魔王呐 ❤ ~! 开发环境: Python 3.8 Pycharm 模块使用 requests jieba 结巴分词 wordcloud 词云 第三方模块安装: win R 输…...

阿里成立AIDC,用“增长”解题国际化
随着阿里巴巴集团2023财年年报的披露,AIDC也随即浮出了水面。 AIDC是阿里国际数字商业集团的英文简称,AIDC即Alibaba International Digital Commerce。阿里是在5月18日公布的截至2023年3月31日的2023财年Q4及全年财报,财报数据之外ÿ…...

全面理解:在计算机科学中同步、异步、并行、并发,他们之间到底有什么区别,如果正确更好的区分它们?
同步,异步,并行,并发的基础概念 在计算机中同步的基础概念 在计算机科学中,同步(Synchronization)是指在多个过程或线程中,它们的执行在时间上是有序的。换句话说,要执行一个特定的…...

网安学习第24天 PHP安全——PHP反序列化
一、序列化与反序列化 1、序列化serialize() 序列化是什么?序列化就是把程序中的对象、数组、结构体等复杂数据,转换成可以存储或传输的格式。 简单说: 把“内存里的对象”变成“字符串/字节流”。 例如 PHP 中有一个对象: $u…...

告别繁琐审核!实测AI Agent如何重塑复杂非结构化票据与合同处理流程?
摘要:在企业数字化转型步入深水区的2026年,处理复杂非结构化票据与合同已成为横亘在财务、法务部门面前的“最后一公里”难题。传统RPA因UI变动易崩溃、主流智能体因缺乏API适配而无法落地,导致大量业务仍依赖低效的人工操作。本文由「企服AI…...

摆脱论文困扰!2026年最值得拥有的专业AI智能降重工具
2026年论文降AI率工具已从“基础改写”升级为多维度智能优化系统,核心评价维度涵盖AI生成内容识别精度、语义逻辑一致性、学术格式合规性、查重适配能力及多语言处理水平。本次测评覆盖6款主流工具,测试场景包括中文与英文论文、全流程与专项功能、免费与…...

开源合规生死线,DeepSeek协议识别错误率高达63%?2024企业级扫描避坑清单全公开
更多请点击: https://intelliparadigm.com 第一章:开源合规生死线,DeepSeek协议识别错误率高达63%?2024企业级扫描避坑清单全公开 近期第三方审计机构对主流AI增强型开源扫描工具开展交叉验证测试,结果显示DeepSeek-R…...

别急着买内存条!先花5分钟用Win自带工具查清你的笔记本有几个卡槽、最大支持多少G
笔记本内存升级避坑指南:5分钟摸清扩容上限与双通道配置每次打开浏览器标签超过十个就开始卡顿,PS处理图片时进度条仿佛在爬行,剪辑视频时渲染时间足够泡一杯咖啡——这些场景是否让你动了升级笔记本内存的念头?先别急着下单&…...

You-Get下载视频音画不同步?可能是FFmpeg路径没配对!附Mac/Linux/Windows三平台配置指南
You-Get跨平台音视频同步解决方案:FFmpeg环境配置全指南 当你在Mac上流畅使用you-get下载合并好的视频,切换到Windows却遭遇音画分离的尴尬时,问题往往出在FFmpeg的环境配置上。本文将带你深入理解多平台下FFmpeg的配置差异,并提…...

FM广播高精度预加重模块设计:解决传统电路缺陷,提升音质与信噪比
1. 项目概述:为什么FM广播需要高精度预加重?如果你玩过FM广播发射,或者对音频处理链路有点研究,大概率听说过“预加重”这个词。简单说,它就是在发射端人为提升高频信号电平的一个处理环节。欧洲标准是50微秒ÿ…...

SharpKeys终极指南:Windows键盘重映射的专业解决方案
SharpKeys终极指南:Windows键盘重映射的专业解决方案 【免费下载链接】sharpkeys SharpKeys is a utility that manages a Registry key that allows Windows to remap one key to any other key. 项目地址: https://gitcode.com/gh_mirrors/sh/sharpkeys 在…...

剖析爆炸事故失联成因,UWB穿戴模式隐患重重,无感定位筑牢矿山透明化空间管理根基
剖析爆炸事故失联成因,UWB穿戴模式隐患重重,无感定位筑牢矿山透明化空间管理根基一、爆炸事故深度溯源:井下人员大面积失联核心诱因矿山瓦斯爆炸突发灾害,瞬间伴随剧烈冲击、粉尘弥漫、巷道形变、线路损毁与人员紧急避险疏散&…...

3分钟掌握清华大学学位论文LaTeX模板:新手快速入门终极指南
3分钟掌握清华大学学位论文LaTeX模板:新手快速入门终极指南 【免费下载链接】thuthesis LaTeX Thesis Template for Tsinghua University 项目地址: https://gitcode.com/gh_mirrors/th/thuthesis 你是否正在为清华大学学位论文的格式要求而头疼?…...