【C++】AVL树


目录
1 简介
2 实现
2.1 框架构建
2.2 插入操作
2.2.1 平衡因子的更新
2.2.2 平衡因子异常时树的调整
3 检验
1 简介
AVL树基于二叉搜索树之上,又对其提出了平衡的要求,即:当向二叉搜索树插入新节点后,保证每个节点的左右子树高度之差的绝对值不超过1
AVL树具有如下性质:
1、它的左右子树都是二叉搜索树。
2、左右子树高度之差(简称平衡因子 = 右子树高度 - 左子树高度)的绝对值不超过1。
AVL树有多种方法来实现,使用平衡因子的方式只是其中一种,接下来讲解实现过程。
2 实现
2.1 框架构建
#pragma once
#include<iostream>template<class K, class V>
struct AVLTreeNode
{std::pair<K, V> _kv;AVLTreeNode<K, V>* _left; //左指针AVLTreeNode<K, V>* _right; //右指针AVLTreeNode<K, V>* _parent; //父指针int _bf; //balance factor 平衡因子
};template<class K, class V>
class AVLTree
{typedef AVLTreeNode<K, V> Node;
public://
private:Node* _root = nullptr;
};2.2 插入操作
2.2.1 平衡因子的更新
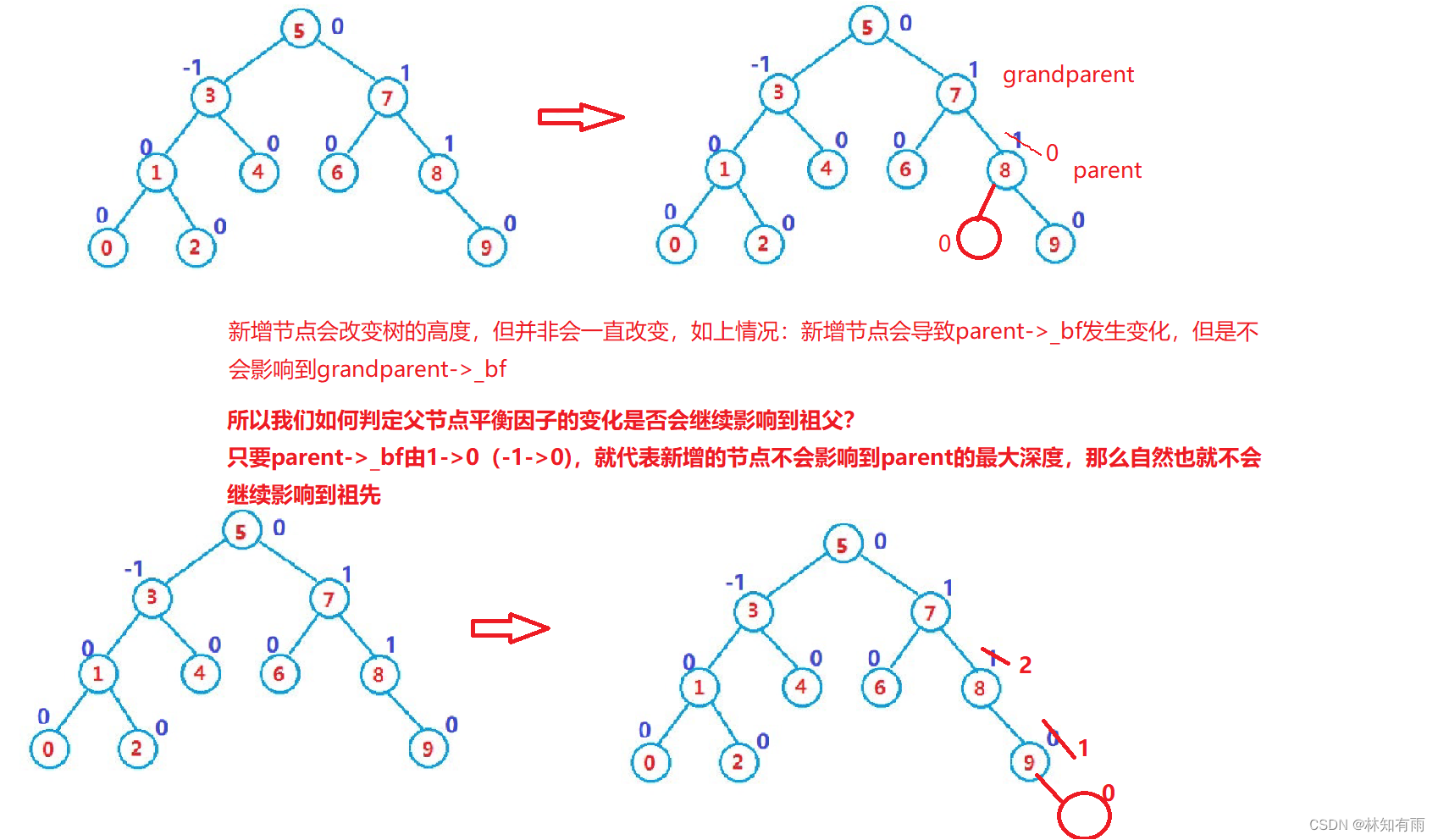
//1、更新平衡因子转换成代码
//这里注意:最坏情况下,平衡因子要持续更新到根节点后停止while (parent){if (cur == parent->_left)--parent->_bf;else++parent->_bf;if (parent->_bf == 0)break;else if(parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_parent;}else if(parent->_bf == 2 || parent->_bf == -2){//调整树来减小平衡因子}else assert(false);}2.2.2 平衡因子异常时树的调整

对于如何调整树,我们引入AVL树的旋转操作,AVL树的旋转分为4种
而旋转最终的目的:
1、让这颗子树左右高度差不超过1
2、旋转过程中让它继续保持是搜索树
3、更新调整孩子节点的平衡因子
4、让这棵树的高度跟插入前保持一致
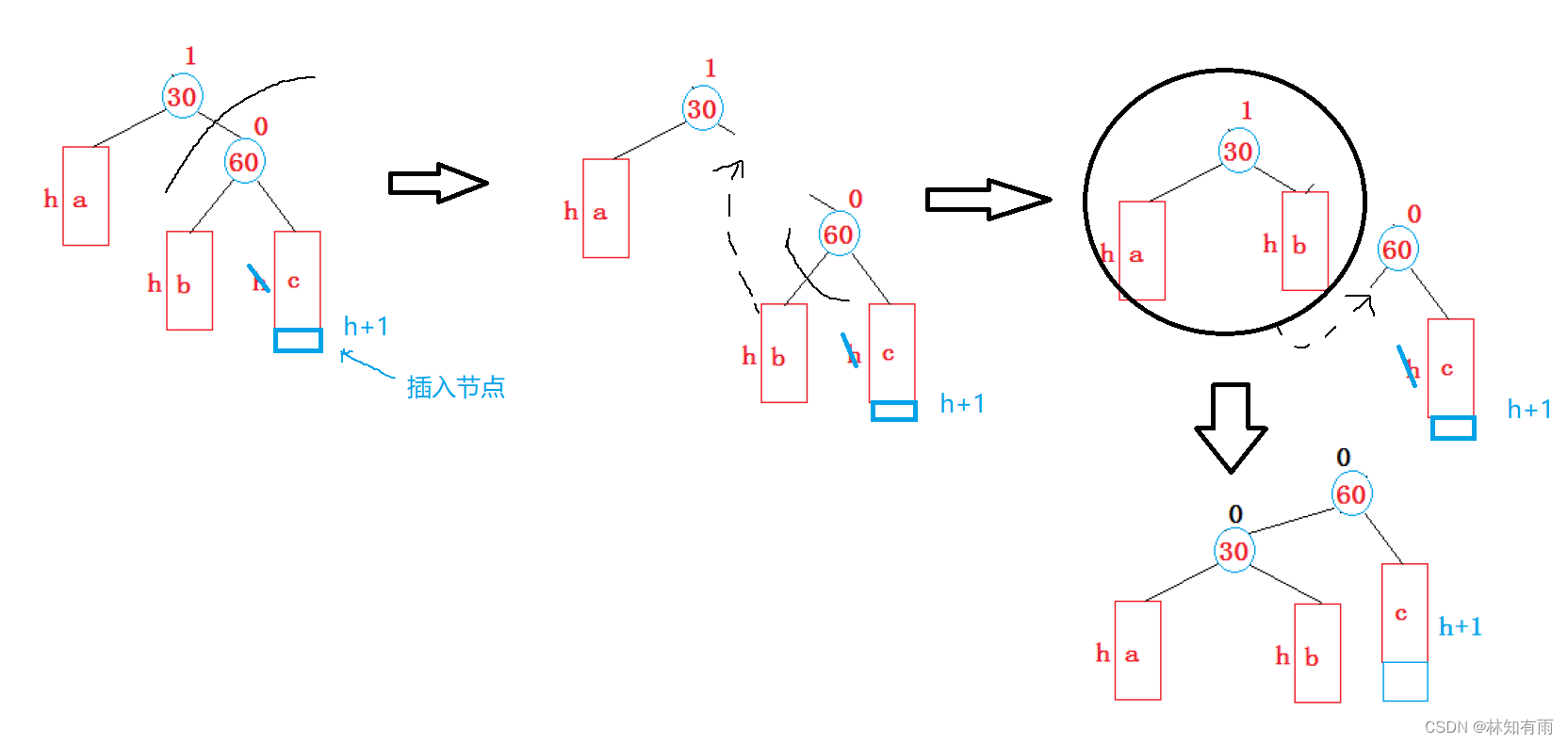
情况1:新节点插入较深右子树的右侧---右右:左单旋
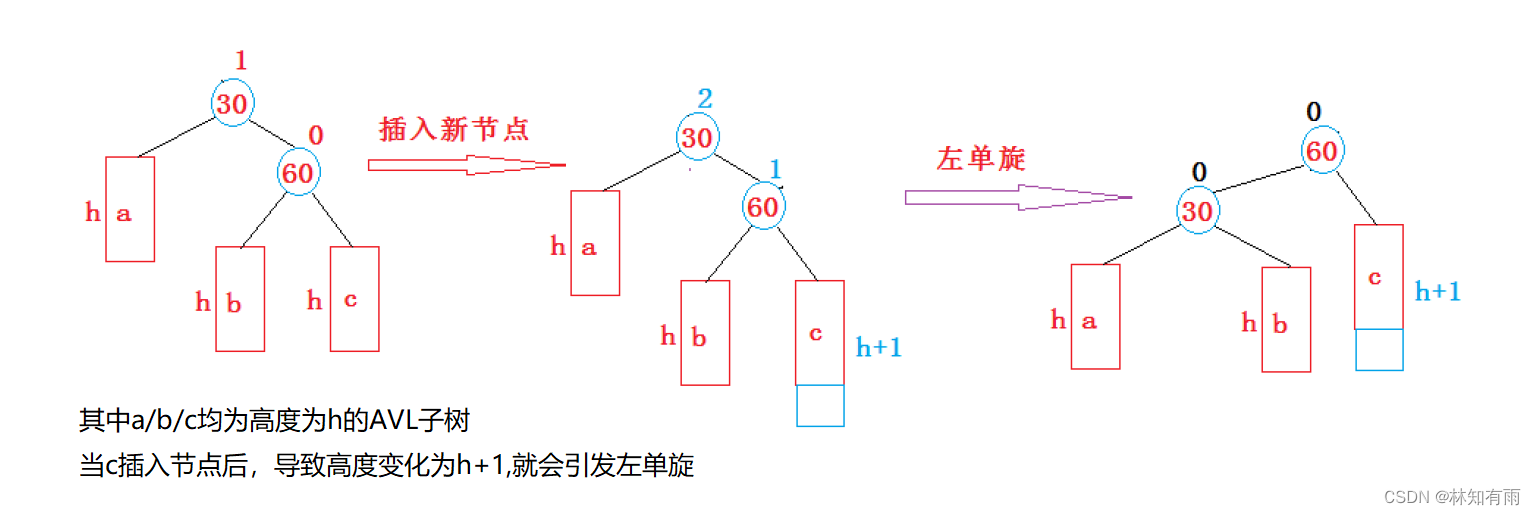
步骤:1、将值为60的节点的左子树移到值为30的节点的右指针下
2、再将以值为30的节点的树移到值为60的节点的左指针下
void RotateL(Node* parent){Node* sub = parent->_right;Node* subL = sub->_left;if (subL)subL->_parent = parent;Node* ppnode = parent->_parent;parent->_right = subL;sub->_left = parent;parent->_parent = sub;if (ppnode == nullptr){_root = sub;_root->_parent = nullptr;}else{if (ppnode->_right == parent)ppnode->_right = sub;else if (ppnode->_left == parent)ppnode->_left = sub;sub->_parent = ppnode;}//重新更新平衡因子sub->_bf = 0;parent->_bf = 0;}情况2:新节点插入较深左子树的左侧---左左:右单旋

步骤:1、将值为30的节点的右子树移到值为60的节点的左指针下
2、再将以值为60的节点的树移到值为30的节点的右指针下
代码与左单旋类似
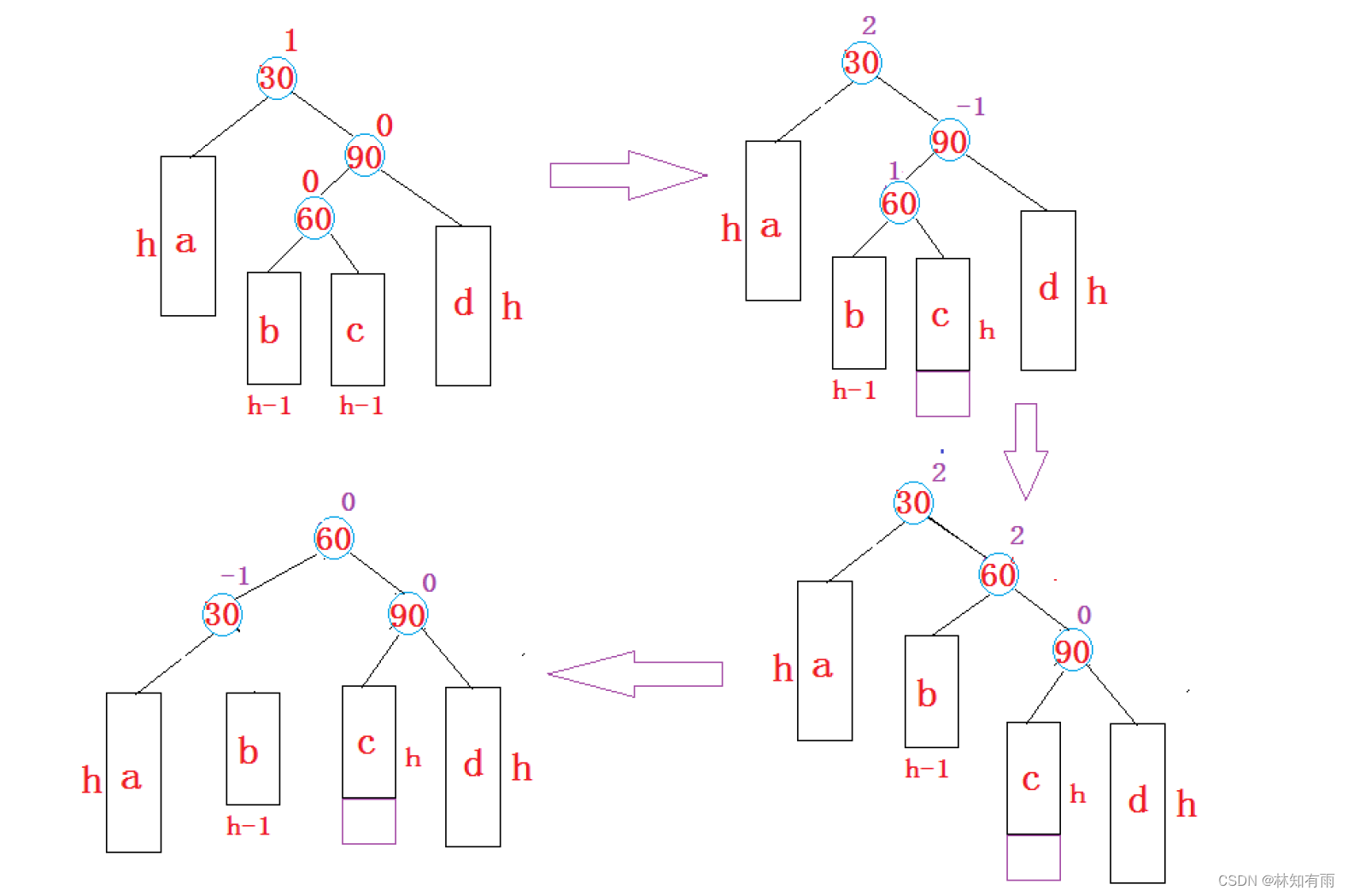
void RotateR(Node* parent){Node* sub = parent->_left;Node* subR = sub->_right;if (subR)subR->_parent = parent;Node* ppnode = parent->_parent;parent->_left = subR;sub->_right = parent;parent->_parent = sub;if (ppnode == nullptr){_root = sub;_root->_parent = nullptr;}else{if (ppnode->_left == parent)ppnode->_left = sub;else if (ppnode->_right == parent)ppnode->_right = sub;sub->_parent = ppnode;}sub->_bf = 0;parent->_bf = 0;}情况3:新节点插入较高左子树的右侧---左右:先左单旋再右单旋 -- 左右双旋

步骤:先以30为轴进行左单旋,再以60为轴进行右单旋
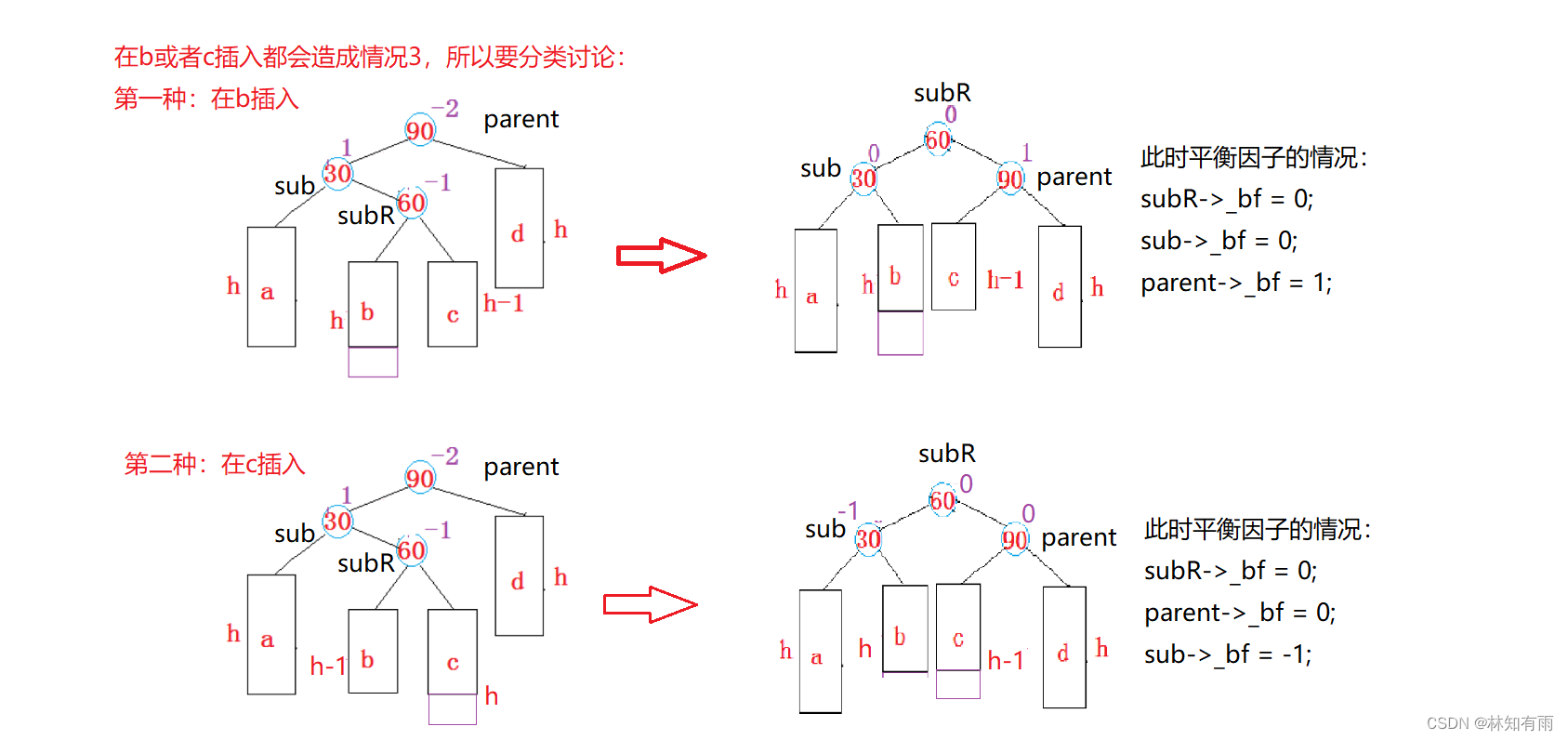
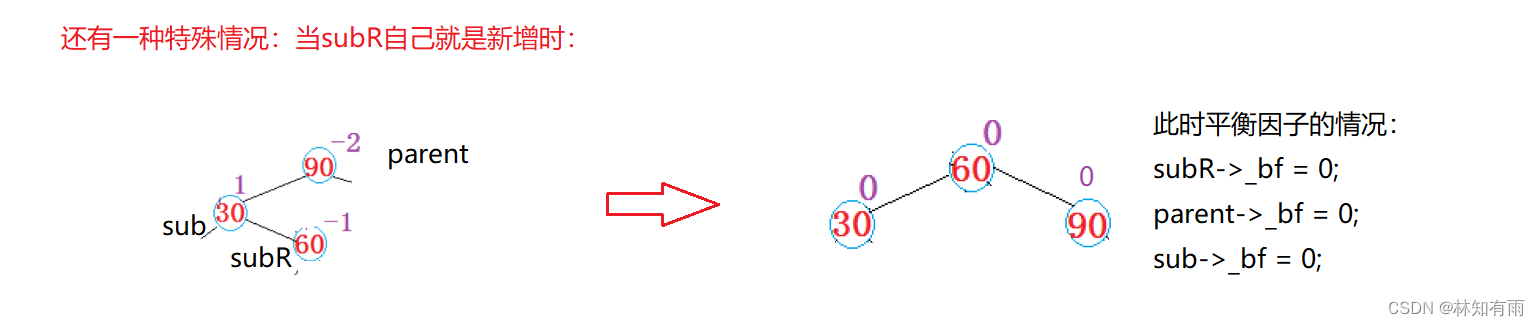
void RotateLR(Node* parent){Node* sub = parent->_left;Node* subR = sub->_right;int bf = subR->_bf; //记录subR的_bf来判断是左插入还是右插入...RotateL(parent->_left);RotateR(parent);if (bf == -1) //subR左子树新增{sub->_bf = 0;parent->_bf = 1;subR->_bf = 0;}else if (bf == 1) //subR右子树新增{parent->_bf = 0;sub->_bf = -1;subR->_bf = 0;}else if (bf == 0) //subR自己就是新增{parent->_bf = 0;sub->_bf = 0;subR->_bf = 0;}elseassert(false);}
情况4:新节点插入较高右子树的左侧---右左:先右单旋再左单旋 -- 右左双旋
代码与左右双旋类似
void RotateRL(Node* parent){Node* sub = parent->_right;Node* subL = sub->_left;int bf = subL->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 1){parent->_bf = -1;sub->_bf = 0;subL->_bf = 0;}else if (bf == 0){parent->_bf = 0;sub->_bf = 0;subL->_bf = 0;}else if (bf == -1){parent->_bf = 0;sub->_bf = 1;subL->_bf = 0;}elseassert(false);}综上可得到AVL数插入节点的整体过程:
bool insert(const pair<K, V>& kv){if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}elsereturn false;}cur = new Node(kv);if (parent->_kv.first < kv.first){parent->_right = cur;cur->_parent = parent;}else{parent->_left = cur;cur->_parent = parent;}//更新平衡因子while (parent){if (cur == parent->_left)--parent->_bf;else++parent->_bf;if (parent->_bf == 0)break;else if (parent->_bf == -1 || parent->_bf == 1){cur = parent;parent = parent->_parent;}else if (parent->_bf == -2 || parent->_bf == 2){if (parent->_bf == 2 && cur->_bf == 1)RotateL(parent);else if (parent->_bf == -2 && cur->_bf == -1)RotateR(parent);else if (parent->_bf == -2 && cur->_bf == 1)RotateLR(parent);else if (parent->_bf == 2 && cur->_bf == -1)RotateRL(parent);break;}}return true;}3 检验
要检验一棵树是否为AVL树,可以先检验是否为二叉搜索树,再检验是否平衡树
如下附上代码:
//按照中序遍历打印,若为有序则是二叉搜索树
void _inorder(Node* root) {if (root == nullptr)return;_inorder(root->_left);cout << root->_kv.first << ":" << root->_kv.second << endl;_inorder(root->_right);}//检验是否为平衡二叉树
int getHeight(Node* root){if (root == nullptr)return 0;int lh = getHeight(root->_left);int rh = getHeight(root->_right);return lh > rh ? lh + 1 : rh + 1;}bool _isBalanced(Node* root){if (root == nullptr)return true;int lh = getHeight(root->_left);int rh = getHeight(root->_right);if (rh - lh != root->_bf)cout << "平衡因子异常" << endl;if (abs(lh - rh) > 2)return false;return _isBalanced(root->_left)&& _isBalanced(root->_right);}本文着重讲解AVL数的整体构建过程,并未涉及到迭代器和其他等接口的设计,这些内容会在之后讲解红黑树一起加入。
感谢阅读
相关文章:
【C++】AVL树
目录 1 简介 2 实现 2.1 框架构建 2.2 插入操作 2.2.1 平衡因子的更新 2.2.2 平衡因子异常时树的调整 3 检验 1 简介 AVL树基于二叉搜索树之上,又对其提出了平衡的要求,即:当向二叉搜索树插入新节点后,保证每个节点的左右…...

Mybatis源码(2) - SqlSessionTemplate的介绍及创建过程
0. 前言1. Spring对SqlSessionTemplate的管理1.1. SqlSessionTemplate的创建:1.2. MapperProxy中sqlSession的来源:2. SqlSessionInterceptor中的getSqlSession0. 前言 众所周知😏:MyBatis通过SqlSessionFactory 创建SqlSession去调用Executo…...
女生做大数据有发展前景吗?
当前大数据发展前景非常不错,且大数据领域对于人才类型的需求比较多元化,女生学习大数据也会有比较多的工作机会。大数据是一个交叉学科涉及到的知识量比较大学习有一定的难度,女生比较适合大数据采集和大数据分析方向的工作岗位。 大数据采…...
Git实用指令记录
config 用例:对git最先要做的一个操作就是配置用户名和邮箱,否则无法commit查看所有可以config的条目,非常之多$ git config --list core.symlinksfalse core.autocrlftrue core.fscachetrue color.interactivetrue color.uiauto help.forma…...

复杂美公链技术重要特色:平行公链架构
复杂美公链技术Chain33从11月开源至今,获得众多合作方的认可,其中首创的平行公链架构被百度、阿里、360等机构认可并跟进研究,这也说明了平行公链或许是区块链普及应用的重要解决方案之一。 平行公链(以下简称平行链)是…...

Java——进制转换的一些内容
Java——进制转换的一些内容1.16进制字符串String转字节数组byte[]2.16进制字符串String转10进制数字int3.字节数组byte[]转字符串String4.16进制字符串String-->byte[]-->String(使用ByteBuffer转换)5.字节数组byte[]转字符数组char[]6.字节byte转…...
使用 Nodejs、Express、Postgres、Docker 在 JavaScript 中构建 CRUD Rest API
让我们在 JavaScript 中创建一个 CRUD rest API,使用:节点.js表达续集Postgres码头工人码头工人组成介绍这是我们将要创建的应用程序架构的架构:我们将为基本的 CRUD 操作创建 5 个端点:创造阅读全部读一个更新删除我们将使用以下…...
电子招标采购系统源码之什么是电子招投标系统?
随着互联网时代的到来,各行业都受到不同的影响,其中招投标行业也不例外。为了顺应互联网潮流的发展,电子招投标逐渐取代传统的纸质的招投标方式,给招标方、投标方、招标代理等各方也带来了前所未有的机遇与挑战。那么什么是电子招…...

匹配文件名称模块glob和fnmatch
匹配文件名称模块glob 1.概述 glob模式规则与re模块的正则表达式规则不大相同,glob模块遵循标准的UNIX路径扩展规则。 fnmatch模块用于根据glob模式比较文件名 2.glob表达式匹配文件名 2.1.测试文件 介绍glob配置规则前,先使用下面的代码创建测试文…...

day12_oop
今日内容 上课同步视频:CuteN饕餮的个人空间_哔哩哔哩_bilibili 同步笔记沐沐霸的博客_CSDN博客-Java2301 零、 复习昨日 一、作业 二、继承 三、重写 四、this和super 五、访问修饰符 零、 复习昨日 局部变量和成员变量什么区别 位置,作用域,初始值,内存位置,生命周期 构造方法…...
在 Flutter 中使用 webview_flutter 4.0 | js 交互
大家好,我是 17。 已经有很多关于 Flutter WebView 的文章了,为什么还要写一篇。两个原因: Flutter WebView 是 Flutter 开发的必备技能现有的文章都是关于老版本的,新版本 4.x 有了重要变化,基于 3.x 的代码很多要重…...
嵌入式ARM工业边缘计算机BL302的CAN总线接口如何设置?
CAN 接口如图所示,输入如下命令: ifconfig -a //查看所有网卡 如果 FlexCAN 驱动工作正常的话就会看到 CAN 对应的网卡接口,如图。从图中可 以看出,有一个名为“can0”的网卡,这个就是 BL302 板上的 CAN1 接口对应的 c…...

Win11系统如何安装Ubuntu20.04(WSL版本)并安装docker
终于还是下定决心去换电脑了……这次采用轻量级的WSL,发现虽然没有占内存的GUI界面,但是编码和阅读文档还是非常nice的 1、首先开启Win11的虚拟机服务 2、下载你期望的Ubuntu服务器(这里以20.04为例) 安装成功后,发现…...

Elasticsearch和Solr的区别
背景:它们都是基于Lucene搜索服务器基础之上开发,一款优秀的,高性能的企业级搜索服务器。(是因为他们都是基于分词技术构建的倒排索引的方式进行查询)开发语言:java语言开发诞生时间:Solr2004年…...

如何在北京买房
首先我陈述一点,如果为了买房后再卖掉赚取差价,我这篇文章也许不适合,我这篇文章为整体愿景的发展而设计,为可操作房产的买卖而操作。 买房的愿景: 首先,我们要以一种心态来买房。那就是以始为终的态度&am…...
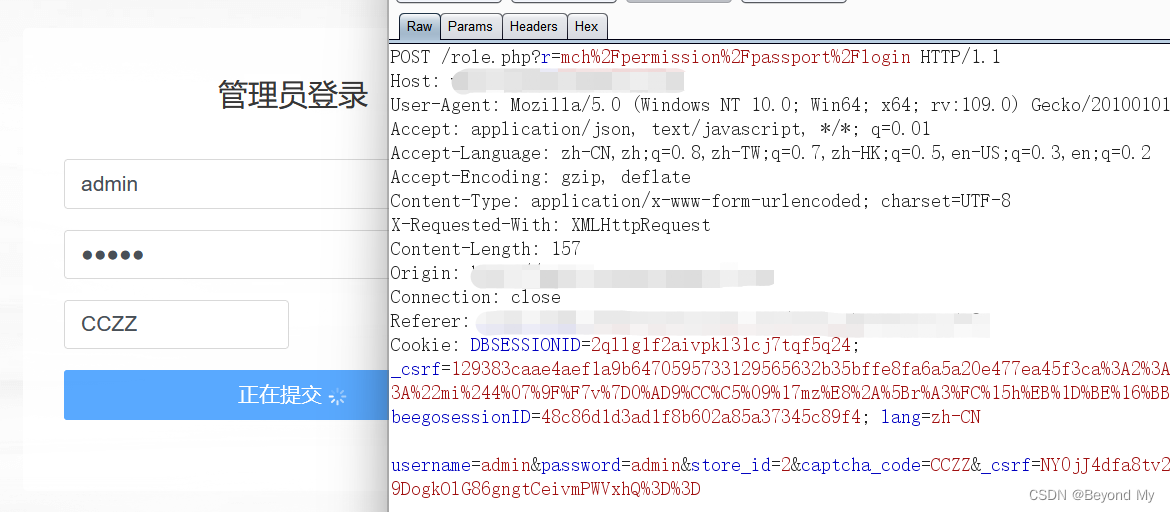
使用Proxifier+burp抓包总结
一、微信小程序&网页抓包 1. Proxifier简介 Proxifier是一款功能非常强大的socks5客户端,可以让不支持通过代理服务器工作的网络程序能通过HTTPS或SOCKS代理或代理链。 2. 使用Proxifier代理抓包 原理:让微信相关流量先走127.0.0.1:80到burp。具体…...

安装华为aab包的处理方式
1、转换 aab包 为 apks 说明: 1、bundletool-all-1.11.2.jar 转换文件的工具 2、a.aab aab源文件 3、xxx.apks 导入的文件以及路径(例如:D:\Android\xxx.apks) 4、–ksxxxx.jks 该aab打包所需的jsk文件 5、三条命令为 jsk打包所…...

Word处理控件Aspose.Words功能演示:使用 C++ 将 RTF 文档转换为 PDF
Aspose.Words 是一种高级Word文档处理API,用于执行各种文档管理和操作任务。API支持生成,修改,转换,呈现和打印文档,而无需在跨平台应用程序中直接使用Microsoft Word。此外,API支持所有流行的Word处理文件…...
【Java|多线程与高并发】进程与线程的区别与联系
文章目录什么是进程什么是线程上下文切换多线程一定比串行执行快吗进程与线程的区别与联系什么是进程 进程的定义:进程是正在运行的程序实体,并且包括这个运行的程序中占据的所有系统资源,比如说CPU(寄存器),IO,内存&a…...

K8s手工创建kubeconfig
我们通过 kubectl 命令行连接 k8s apiserver 时需要依赖 kubeconfig 文件。 kubeconfig 文件通常包含了 context(上下文)列表,每个 context 又会引用 cluster 和 user,最后通过 current-context 指定当前 kubeconfig 使用哪个 con…...

别再只用XGBoost了!LightGBM实战:用直方图算法和Leaf-wise策略,5分钟搞定海量数据建模
LightGBM实战:5个关键技巧让海量数据建模效率提升10倍 当你的数据集从GB级别跃升到TB级别时,XGBoost的训练时间可能从几小时延长到几天。上周我们团队处理一个包含3亿条用户行为记录的数据集时,原本需要8小时的XGBoost训练,切换到…...

AI工具搭建自动化视频生成生成日志审计
1,它是个啥 其实就是拿AI当黑盒,把视频生成这件事拆成按脚本跑的一连串动作,然后全程记下谁在什么时候调了哪个模型、输出了啥、花了多少秒、花了多少钱。做这件事的人,多半是公司里管产研的那几位,他们怕的不是AI干砸…...

Go语言服务网格egress:外部服务访问
Go语言服务网格egress:外部服务访问 1. Egress代理 package egressimport ("net/http""net/url" )type EgressProxy struct {dialer *net.Dialertransport *http.Transport }func NewEgressProxy() *EgressProxy {return &EgressProxy{d…...
 2026)
香港電動車普及化路線圖(繁) 2026
香港环境及生态局 2026 年 2 月发布《香港电动车普及化路线图(更新版)》,坚定维持2035 年或之前停止新登记燃油及混合动力私家车、2050 年前实现车辆零排放的核心目标,不受海外部分地区放缓电动化政策的影响,持续朝着零…...

大会证件/笔记本/开发板丢失怎么办?一线运维团队整理的7类高危物品应急响应SOP,含密钥擦除与隐私保护强制流程
更多请点击: https://intelliparadigm.com 第一章:奇点智能技术大会失物招领 在奇点智能技术大会现场,遗失物品高频出现在三个核心区域:主会场入口安检台、AI沙箱体验区休息椅、以及开源工作坊工位抽屉。为提升认领效率ÿ…...

实用开源工具:3步解决游戏按键冲突的SOCD清理最佳实践指南
实用开源工具:3步解决游戏按键冲突的SOCD清理最佳实践指南 【免费下载链接】socd Key remapper for epic gamers 项目地址: https://gitcode.com/gh_mirrors/so/socd 你是否曾在激烈的游戏对战中,明明按下了正确的方向键,角色却做出了…...

保姆级教程:在STM32CubeIDE项目中集成SEGGER RTT,并用J-Scope抓取波形
STM32CubeIDE实战:SEGGER RTT与J-Scope联调全攻略 在嵌入式开发中,实时观测变量变化是调试过程中不可或缺的一环。传统调试方法如串口打印或断点调试往往存在效率低下或干扰系统运行的问题。本文将手把手教你如何在STM32CubeIDE项目中集成SEGGER RTT技术…...

SingleFile革命性方案:为什么传统网页保存方法注定失败,而单文件保存正在重新定义数字保存范式
SingleFile革命性方案:为什么传统网页保存方法注定失败,而单文件保存正在重新定义数字保存范式 【免费下载链接】SingleFile Web Extension for saving a faithful copy of a complete web page in a single HTML file 项目地址: https://gitcode.com/…...

ViGEmBus:Windows内核级虚拟手柄驱动的终极解决方案
ViGEmBus:Windows内核级虚拟手柄驱动的终极解决方案 【免费下载链接】ViGEmBus Windows kernel-mode driver emulating well-known USB game controllers. 项目地址: https://gitcode.com/gh_mirrors/vi/ViGEmBus 在Windows游戏生态中,手柄兼容性…...

SuperDuper框架:AI模型与数据库的无缝集成与向量搜索实践
1. 项目概述:当AI应用开发遇上“超级复制”如果你正在构建一个AI驱动的应用,无论是智能客服、内容生成还是数据分析,你大概率会面临一个经典困境:模型训练好了,但怎么把它变成一个稳定、可扩展、能处理真实世界复杂数据…...