多激光雷达手眼标定
手眼标定方法已经有很多博客进行解析,但是都是针对机器人的手(夹爪)眼睛(相机)进行标定。例如:
标定学习笔记(四)-- 手眼标定详解
手眼标定_全面细致的推导过程
本文主要描述多激光雷达应用中如何使用手眼标定的方法进行标定。
假如存在以下问题,在一个小车上存在两个激光雷达,激光雷达A与激光雷达B,须求解激光雷达B到激光雷达A的转换参数 B A T ^A_BT BAT(外参)。
利用手眼标定方法原理如下:
变量定义
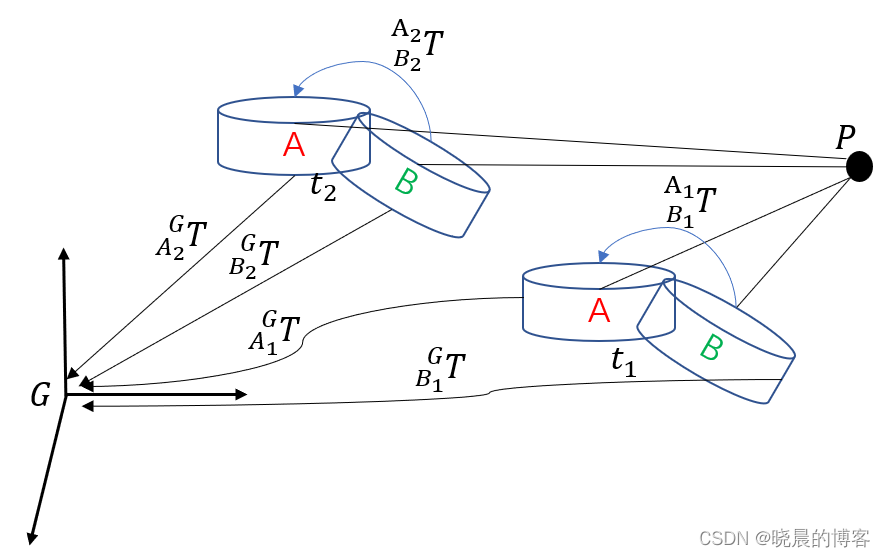
如上图中所示,存在一个世界坐标系G,点 P P P在世界坐标系中的坐标为 P G P_G PG。
在 t 1 t_1 t1时刻,激光雷达A与激光雷达B分别观测到点 P P P的坐标为: P A 1 P_{A1} PA1, P B 1 P_{B1} PB1。
在 t 2 t_2 t2时刻,激光雷达A与激光雷达B分别观测到点 P P P的坐标为: P A 2 P_{A2} PA2, P B 2 P_{B2} PB2。
在 t 1 t_1 t1时刻,激光雷达A与激光雷达B分别到全局坐标系 G G G的转换关系为: A 1 G T ^{G}_{A1}T A1GT, B 1 G T ^{G}_{B1}T B1GT。
在 t 2 t_2 t2时刻,激光雷达A与激光雷达B分别到全局坐标系 G G G的转换关系为: A 2 G T ^{G}_{A2}T A2GT, B 2 G T ^{G}_{B2}T B2GT。
在 t 1 t_1 t1时刻,激光雷达A与激光雷达B之间的转换关系为 B 1 A 1 T ^{A1}_{B1}T B1A1T
在 t 2 t_2 t2时刻,激光雷达A与激光雷达B之间的转换关系为 B 2 A 2 T ^{A2}_{B2}T B2A2T
推导过程
在 t 1 t_1 t1时刻,点 P P P在世界坐标系中的坐标 P G P_G PG可以通过下式计算:
P G = ( A 1 G T ) ( B 1 A 1 T ) P B 1 P_G=(^{G}_{A1}T)(^{A1}_{B1}T)P_{B1} PG=(A1GT)(B1A1T)PB1
在 t 2 t_2 t2时刻,
P G = ( A 2 G T ) ( B 2 A 2 T ) P B 2 P_G=(^{G}_{A2}T)(^{A2}_{B2}T)P_{B2} PG=(A2GT)(B2A2T)PB2
由上述两式可得:
P G = ( A 1 G T ) ( B 1 A 1 T ) P B 1 = ( A 2 G T ) ( B 2 A 2 T ) P B 2 = P G P_G=(^{G}_{A1}T)(^{A1}_{B1}T)P_{B1}=(^{G}_{A2}T)(^{A2}_{B2}T)P_{B2}=P_G PG=(A1GT)(B1A1T)PB1=(A2GT)(B2A2T)PB2=PG
由于认为激光雷达A与激光雷达B之间是刚性连接,所以二者之间的变换不随时间进行变化,即:
B 1 A 1 T = B 2 A 2 T = B A T ^{A1}_{B1}T=^{A2}_{B2}T=^{A}_{B}T B1A1T=B2A2T=BAT
则上式变换为:
( A 1 G T ) ( B A T ) P B 1 = ( A 2 G T ) ( B A T ) P B 2 (^{G}_{A1}T)(^{A}_{B}T)P_{B1}=(^{G}_{A2}T)(^{A}_{B}T)P_{B2} (A1GT)(BAT)PB1=(A2GT)(BAT)PB2
两边同左乘 ( A 2 G T ) − 1 (^{G}_{A2}T)^{-1} (A2GT)−1,并同时右乘 ( P B 1 ) − 1 (P_{B1})^{-1} (PB1)−1,转换为下式:
( A 2 G T ) − 1 ( A 1 G T ) ( B A T ) = ( B A T ) P B 2 ( P B 1 ) − 1 (^{G}_{A2}T)^{-1}(^{G}_{A1}T)(^{A}_{B}T)=(^{A}_{B}T)P_{B2}(P_{B1})^{-1} (A2GT)−1(A1GT)(BAT)=(BAT)PB2(PB1)−1
假设 ( B A T ) (^{A}_{B}T) (BAT)为要求解的变量 X X X,系数为 A = ( A 2 G T ) − 1 ( A 1 G T ) A=(^{G}_{A2}T)^{-1}(^{G}_{A1}T) A=(A2GT)−1(A1GT)与 B = P B 2 ( P B 1 ) − 1 B=P_{B2}(P_{B1})^{-1} B=PB2(PB1)−1。
则上式转换为:
A X = X B AX=XB AX=XB
这就是我们经常所说的手眼标定推导出的形式了。但是,这和我们的激光雷达轨迹有什么关系呢?
接着,对系数 A A A与 B B B分别进行转换,过程如下:
对式 A A A,代入 A 1 G T = ( A 2 G T ) ( A 1 A 2 T ) ^{G}_{A1}T=(^{G}_{A2}T)(^{A2}_{A1}T) A1GT=(A2GT)(A1A2T)得:
A = ( A 2 G T ) − 1 ( A 1 G T ) = ( A 2 G T ) − 1 ( A 2 G T ) ( A 1 A 2 T ) = A 1 A 2 T A=(^{G}_{A2}T)^{-1}(^{G}_{A1}T)=(^{G}_{A2}T)^{-1}(^{G}_{A2}T)(^{A2}_{A1}T)=^{A2}_{A1}T A=(A2GT)−1(A1GT)=(A2GT)−1(A2GT)(A1A2T)=A1A2T
对式 B B B,分别代入 P B 1 = ( G B 1 T ) P G P_{B1}=(^{B1}_{G}T)P_{G} PB1=(GB1T)PG与 P B 2 = ( G B 2 T ) P G P_{B2}=(^{B2}_{G}T)P_{G} PB2=(GB2T)PG得:
B = P B 2 ( P B 1 ) − 1 = ( G B 2 T ) P G ( G B 1 T P G ) − 1 B=P_{B2}(P_{B1})^{-1}=(^{B2}_{G}T)P_{G}(^{B1}_{G}TP_{G})^{-1} B=PB2(PB1)−1=(GB2T)PG(GB1TPG)−1
= ( G B 2 T ) P G P G − 1 ( G B 1 T ) − 1 = ( G B 2 T ) ( G B 1 T ) − 1 =(^{B2}_{G}T)P_{G}P_{G}^{-1}(^{B1}_{G}T)^{-1}=(^{B2}_{G}T)(^{B1}_{G}T)^{-1} =(GB2T)PGPG−1(GB1T)−1=(GB2T)(GB1T)−1
代入 G B 2 T = ( B 1 B 2 T ) ( G B 1 T ) ^{B2}_{G}T=(^{B2}_{B1}T)(^{B1}_{G}T) GB2T=(B1B2T)(GB1T)得:
B = ( G B 2 T ) ( G B 1 T ) − 1 = ( B 1 B 2 T ) ( G B 1 T ) ( G B 1 T ) − 1 = B 1 B 2 T B=(^{B2}_{G}T)(^{B1}_{G}T)^{-1}=(^{B2}_{B1}T)(^{B1}_{G}T)(^{B1}_{G}T)^{-1}=^{B2}_{B1}T B=(GB2T)(GB1T)−1=(B1B2T)(GB1T)(GB1T)−1=B1B2T
由此,可得 A X = X B AX=XB AX=XB可以转换为下述形式:
( A 1 A 2 T ) X = X ( B 1 B 2 T ) (^{A2}_{A1}T)X=X(^{B2}_{B1}T) (A1A2T)X=X(B1B2T)
式中, A 1 A 2 T ^{A2}_{A1}T A1A2T为激光雷达 A A A从 t 1 t_1 t1时刻到 t 2 t_2 t2时刻的位姿变换(也就是轨迹)。同样的, B 1 B 2 T ^{B2}_{B1}T B1B2T为激光雷达 B B B从 t 1 t_1 t1时刻到 t 2 t_2 t2时刻的位姿变换。
相关文章:
多激光雷达手眼标定
手眼标定方法已经有很多博客进行解析,但是都是针对机器人的手(夹爪)眼睛(相机)进行标定。例如: 标定学习笔记(四)-- 手眼标定详解 手眼标定_全面细致的推导过程 本文主要描述多激光…...
SQL执行过程
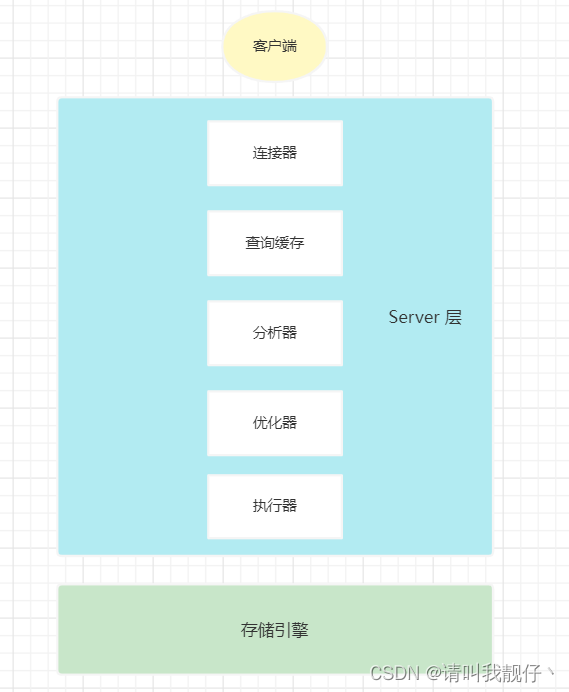
1. select 语句执行过程 一条 select 语句的执行过程如上图所示 1、建立连接 连接器会校验你输入的用户名和密码是否正确,如果错误会返回提示,如果正确,连接器会查询当前用户对于的权限。连接器的作用就是校验用户权限 2、查询缓存 MySQL…...

K8S 部署 seata
文章目录 创建 Deployment 文件创建 ConfigMap 文件创建 Service 文件运行访问高可用部署踩坑 官方文档 k8s中volumeMounts.subPath的巧妙用法 创建 Deployment 文件 deploymemt.yaml namespace:指定命名空间image:使用 1.5.2 版本的镜像ports…...
ClickHouse:(二)数据类型
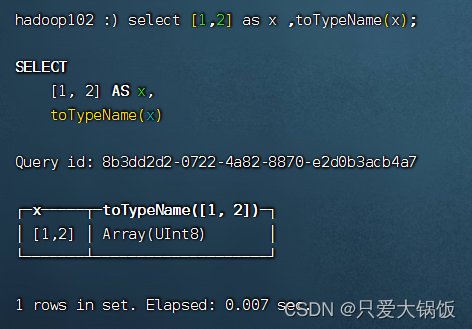
1.整型 固定长度的整型分为:有符号和无符合整型 有符号整型无符号整型类型范围类型范围Int8 -128 : 127 UInt8 0 : 255 Int16 -32768 : 32767 UInt16 0 : 65535 Int32 -2147483648 : 2147483647 UInt32 0 : 4294967295 Int64 -9223372036854775808 : 9223372036854…...

项目文档(request页面代码逻辑)
项目文档 目录 项目文档 1. 封装请求基地址 代码 2. 添加请求拦截器并设置请求头 作用 代码部分 3. 添加响应拦截器 作用 代码 4. token过期问题处理 5. 无感刷新 作用 代码 6. refresh_token过期处理 解决方式 1. 封装请求基地址 在src目录下 放上一个专门写…...

后端传到前端的JSON数据大写变小写--2023
问题复现:1. 首先我先说一下,我用了lombok,事实证明和这个也有关系 前端这里写的也是按照驼峰命名来写的 控制台打印出来的数据 后台打印出来的数据 解决方法: 1. 重写get/set方法 因为我在实体类上标注了Data注解 重写get/se…...
学习【菜鸟教程】【C++ 类 对象】【C++ 类的静态成员】
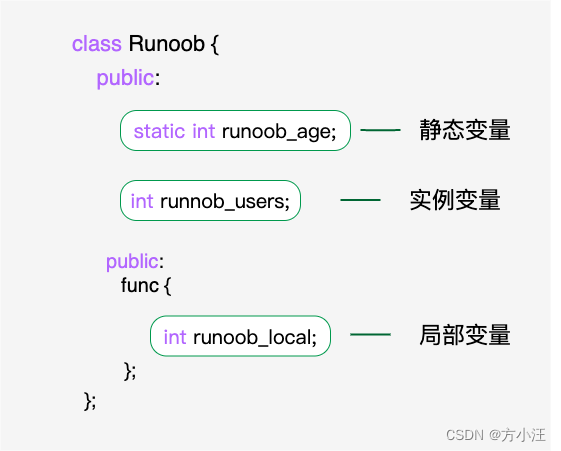
链接 1. 教程 可以使用 static 关键字来把类成员定义为静态的。当我们声明类的成员为静态时,这意味着无论创建多少个类的对象,静态成员都只有一个副本。 静态成员在类的所有对象中是共享的。如果不存在其他的初始化语句,在创建第一个对象时…...

计算机四大件笔记
啊~数据库、操作系统、计算机网络、Linux start 操作系统 并发和并行 并发是同一时间段内发生了多个事情,多任务之间互相抢占资源。 并行是在同一时间点内发生了多个事情,多任务之间不互相抢占资源,只有多CPU的情况下才能并行。 例如&a…...

【vue上传文件——hash】
vue上传文件 要求:只能上传视频,先计算文件的hash值,hash值一样则不需要上传,不一样在执行上传 分析:因为el-upload没有找到合适的属性,本次用的是原生的input的type属性为file上传 代码: html: 通过点击选取文件按钮调用input上传 js 第一步:点击上传文件先效验是否…...
【OpenCV DNN】Flask 视频监控目标检测教程 01
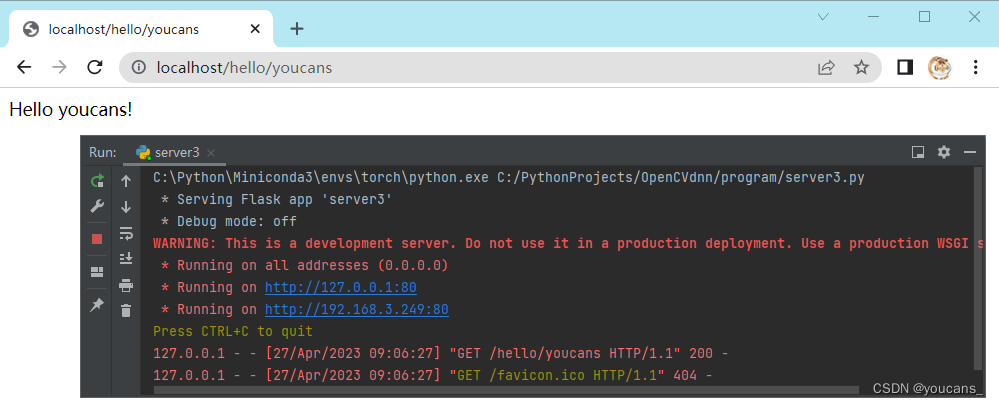
欢迎关注『OpenCV DNN Youcans』系列,持续更新中 【OpenCV DNN】Flask 视频监控目标检测教程 01 【OpenCV DNN】Flask 视频监控目标检测教程 01 1. 面向Python程序的Web框架2. Flask 框架的安装与使用2.1 Flask 安装2.2 Flask 框架例程2.3 绑定IP和端口2.4 Flask路…...
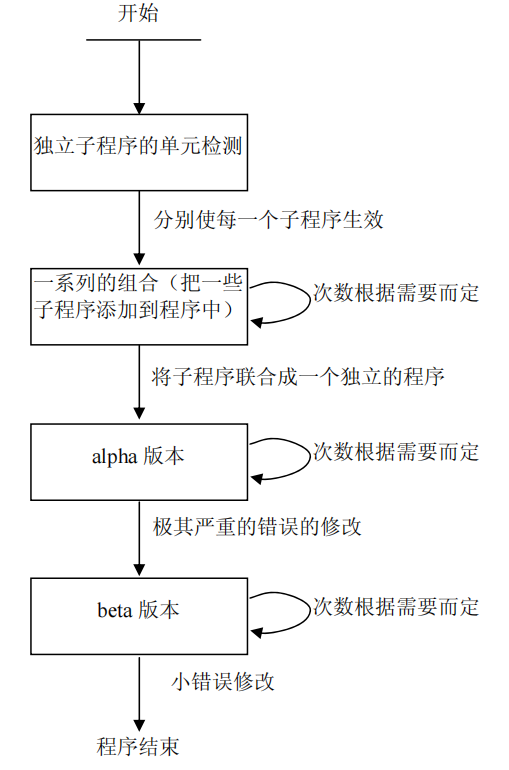
(转载)从0开始学matlab(第10天)—自顶向下的编程思想
在前面的内容中,我们开发了几个完全运转的 MATLAB 程序。但是这些程序都十分简单,包括一系列的 MATLAB 语句,这些语句按照固定的顺序一个接一个的执行。像这样的程序我们称之顺序结构程序。它首先读取输入,然后运算得到所需结果&a…...

mapreduce技术
要实现操作hbase数据表首先要了解它的原理: 1,Hbase原理篇 HBASE就是基于Hadoop的一个开源项目,也是对Google的BigTable的一种实现。 BigTable最浅显来看就是一张很大的表,表的属性可以根据需求去动态增加,但是又没有表与表之间…...

AI智慧安监视频平台EasyCVR视频出现不能播放的情况排查与解决
EasyCVR基于云边端协同,可支持海量视频的轻量化接入与汇聚管理。平台兼容性强、拓展度高,可提供视频监控直播、视频轮播、视频录像、云存储、回放与检索、智能告警、服务器集群、语音对讲、云台控制、电子地图、H.265自动转码、平台级联等功能。 有用户反…...
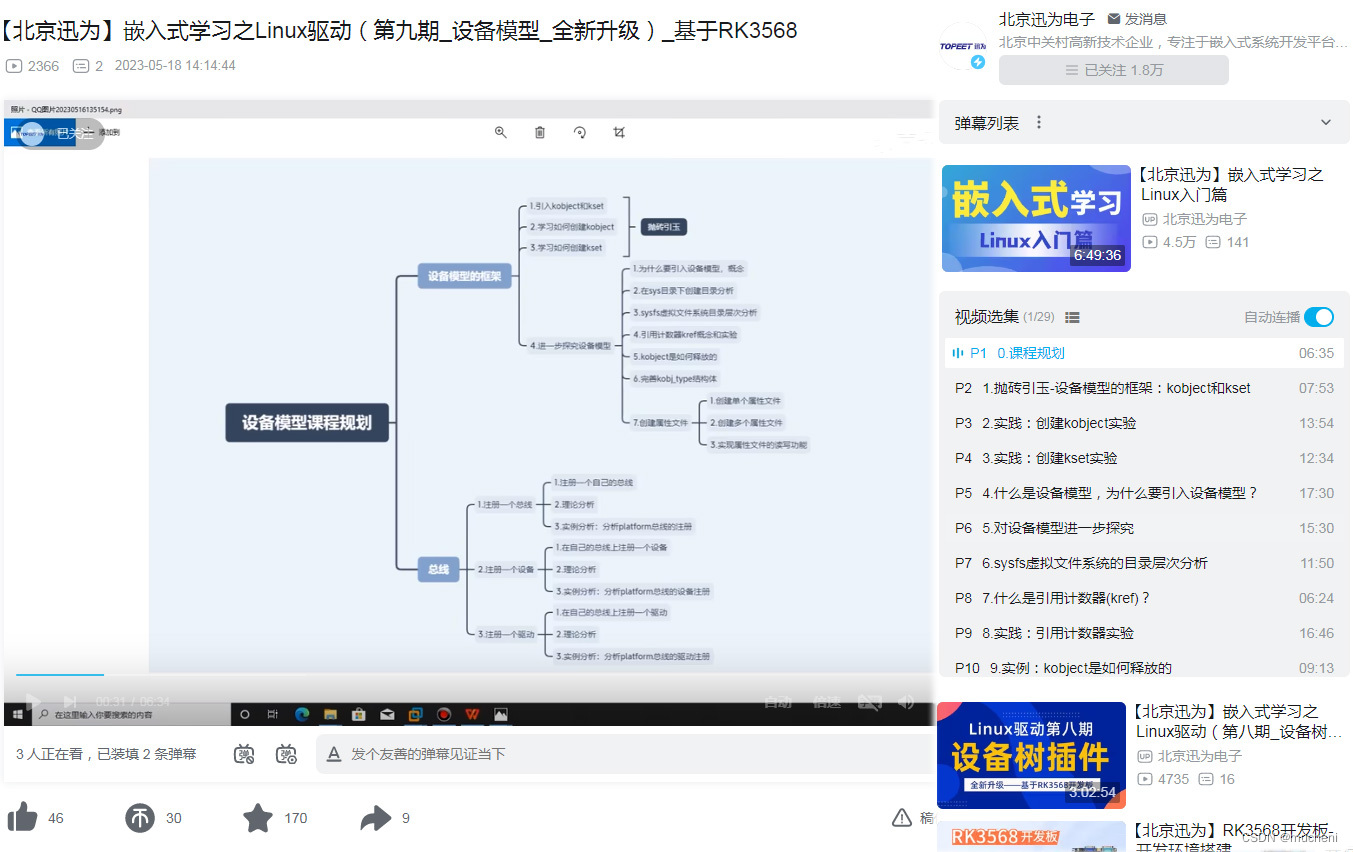
嵌入式学习之Linux驱动(第九期_设备模型_教程更新了)_基于RK3568
驱动视频全新升级,并持续更新~更全,思路更科学,入门更简单。 迅为基于iTOP-RK3568开发板进行讲解,本次更新内容为第九期,主要讲解设备模型,共计29讲。视频选集 0.课程规划 06:35 1.抛砖引玉-设备模型…...
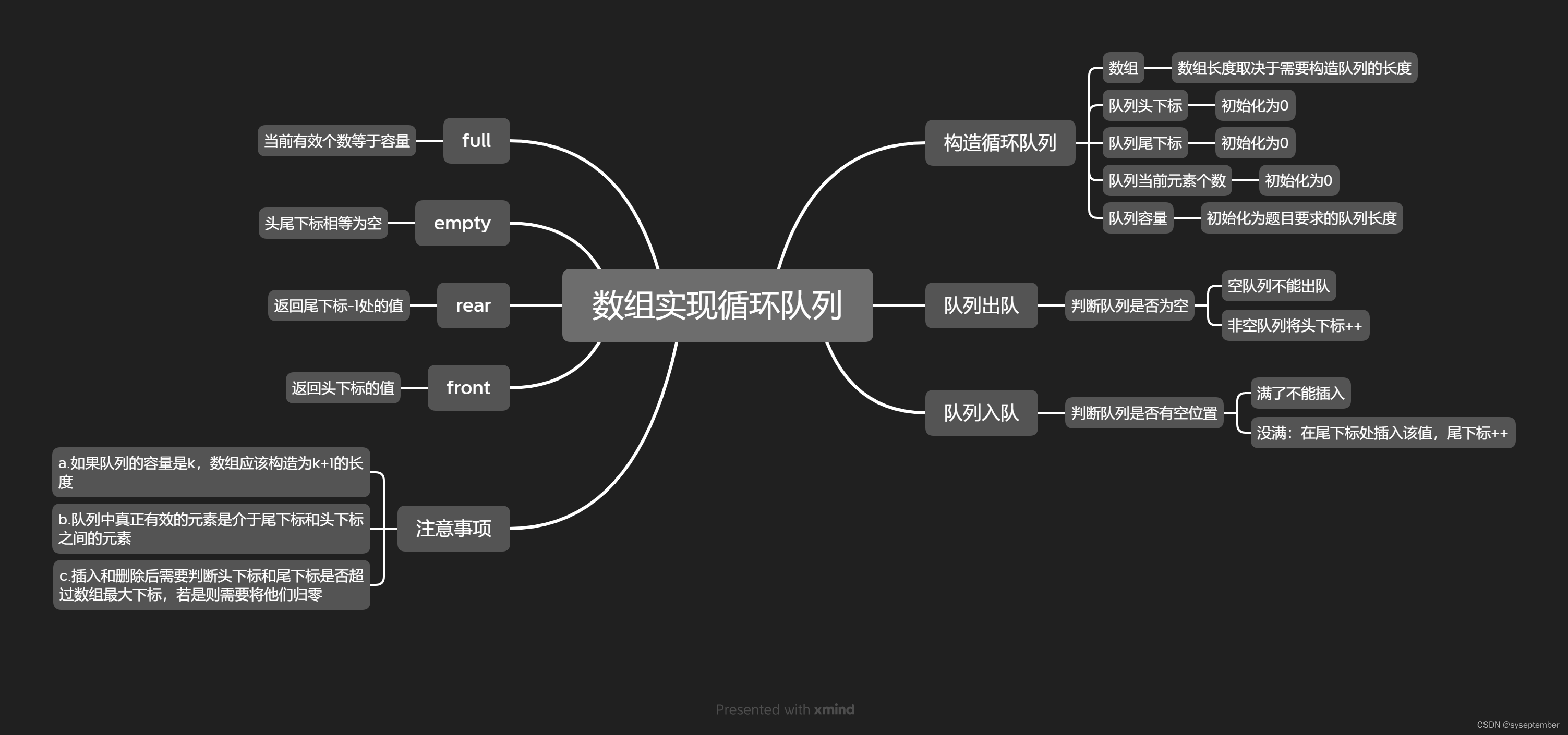
LeetCode662.设计循环队列||4种方法实现
目录 题目 思路1(链表) 代码 思路2(数组) 代码 题目 题目要求的队列需要实现的功能有 ①Creat---设置队列长度 ②Front---获取队列头 ③Rear---获取队列尾 ④en----插入元素 ⑤de---删除元素 ⑥empty---判空 ⑦full---判满 思路1(链表) 🔍普通队列长度没有限制&…...

人工智能专栏第十二讲——依存解析
依存句法分析是一种自然语言处理技术,其目的是识别句子中单词之间的依赖关系。在自然语言处理中,依存句法分析是一项非常重要的任务,因为它可以帮助我们理解句子的语义结构,从而更好地进行文本分析、信息抽取、语音识别等任务。 …...
nest日志包pino、winston配置-懒人的折腾
nest日志 三种node服务端日志选型 winstonpinolog4js 2023年5月23日 看star数:winston > pino > log4js 使用体验: pino 格式简洁,速度快,支持输入日志到任意数据库,日志暂无自动清理(可能是我…...

一文看懂增值税发票识别OCR:从技术原理到 API Java 示例代码接入
引言 增值税发票识别OCR API是一项重要的技术创新,它在如今信息化的商业环境中发挥着重要作用。通过利用该API,企业和机构能够实现增值税发票的自动化识别和信息提取,从而在财务管理、票据核对、报销流程等方面带来许多好处。 本文将详细介…...
消息队列对比
目录 什么是消息队列 常用的消息队列工具对比 1 、ActiveMQ 2 、RabbitMQ 3、Kafka 4、 RocketMQ 什么是消息队列 消息队列是分布式应用间交换信息的重要组件,消息队列可驻留在内存或磁盘上, 队列可以存储消息直到它们被应用程序读走。通过消息队列࿰…...

Ceph对象存储的基本概念,使用以及优点
Ceph对象存储的基本概念,使用以及优点 Ceph是一种基于分布式架构的对象存储系统,它可以提供高可靠性、高扩展性和高性能的存储服务。这种存储系统可以用于处理大量的数据,例如大型数据库、云存储、视频流、图像数据等。Ceph对象存储系统的基…...

量子机器学习对称性工程权衡:Twirlator工具解析与实战指南
1. 量子机器学习中的对称性:从理论到工程实践的权衡在量子机器学习(QML)领域,我们一直在寻找能够提升模型性能、加速训练并增强泛化能力的“银弹”。对称性,这个在经典几何深度学习(Geometric Deep Learnin…...

Construct3新手避坑指南:为什么你的射击游戏角色总卡住动不了?
Construct3射击游戏开发实战:角色卡顿问题深度排查手册刚完成第一个Construct3射击游戏demo的兴奋感,往往会被运行时角色突然卡住的尴尬瞬间浇灭。这不是教程里承诺的流畅体验——你的主角在关键时刻僵在原地,子弹发射延迟,敌人却…...

FPGA在遥感机器学习中的优势与优化实践
1. FPGA在遥感机器学习中的核心优势解析 FPGA(现场可编程门阵列)在边缘计算场景中展现出独特的价值主张。与通用处理器不同,FPGA通过硬件级并行架构实现两个关键突破:首先是数据流驱动的计算模式,消除传统冯诺依曼架构…...

5分钟上手:用LeaguePrank打造专属英雄联盟客户端
5分钟上手:用LeaguePrank打造专属英雄联盟客户端 【免费下载链接】LeaguePrank 项目地址: https://gitcode.com/gh_mirrors/le/LeaguePrank 想要让你的英雄联盟客户端界面变得与众不同吗?LeaguePrank是一款基于官方LCU API开发的英雄联盟客户端美…...
)
CentOS 7最小化安装后,复制粘贴和网络配置的保姆级教程(附图形界面切换)
CentOS 7最小化安装后的生存指南:从零配置到高效开发环境搭建刚完成CentOS 7最小化安装的新手用户,往往会陷入一种"手足无措"的状态——既无法从宿主机复制粘贴命令,又无法连接网络更新系统。这种困境就像被丢进一个没有工具的荒岛…...

国密滑块登录实战:SM2+SM4密码链路全解析
1. 这不是“加个密”那么简单:滑块登录里藏着的国密链路真相你有没有试过,在某个政务类App或银行类Web端拖动滑块完成登录后,页面瞬间跳转,但控制台Network面板里却找不到任何明文密码字段?甚至抓包发现,提…...

CentOS7 搭建 Kubernetes 集群
CentOS7 搭建 Kubernetes 集群完整指南 基于提供的文档,本文提供kubeadm快速搭建(推荐新手)和二进制手动搭建(生产可控)两种方案,所有步骤均适配CentOS7系统。 一、通用前置准备(两种方式都需执…...

别再只把PCA当降维工具了!用Python+Sklearn实战服装标准与消费支出分析
解锁PCA的隐藏技能:用Python实战服装标准与消费支出分析当我们谈论主成分分析(PCA)时,大多数人首先想到的是"降维"——这个标签如此深入人心,以至于我们常常忽略了PCA作为"数据解释器"和"可视…...

从“画箭头”到1亿播放量:机械工程师梁乐平,如何用CAD绘图书写知识传播新篇章?
一、绘图的开始和许多人一样,梁乐平选择了机械类专业,从广东理工学院毕业后,一头扎进了机械设计与绘图的世界。与别人不同的是,他给自己取了一个颇有传统文人气息的字“金泓”。这个细节,隐约透露着他性格中那份既务实…...

17.通杀安卓 /iOS 全机型!Linux 原生刷机方案,EDL 底层救砖 + 自动化源码开源
摘要 本文面向具备基础Linux命令行操作能力的开发者与维修工程师,系统阐述主流品牌Android与iOS设备刷机维修的底层原理与可落地方案。覆盖华为、小米、OPPO、vivo、一加及苹果设备,提供从Bootloader解锁、Recovery刷写、固件烧录到基带修复的完整技术栈。所有操作均基于USB…...