STM32MP157驱动开发——按键驱动(休眠与唤醒)
文章目录
- “休眠-唤醒”机制:
- APP执行过程
- 内核函数
- 休眠函数
- 唤醒函数
- 休眠与唤醒方式的按键驱动程序(stm32mp157)
- 驱动程序框架
- button_test.c
- gpio_key_drv.c
- Makefile
- 修改设备树文件
- 编译测试
“休眠-唤醒”机制:
当应用程序必须等待某个事件发生,比如必须等待按键被按下时,可以使用“休眠-唤醒”机制:
- ① APP 调用 read 等函数试图读取数据,比如读取按键;
- ② APP 进入内核态,也就是调用驱动中的对应函数,发现有数据则复制到用户空间并马上返回;
- ③ 如果 APP 在内核态,也就是在驱动程序中发现没有数据,则
APP 休眠; - ④ 当有数据时,比如当按下按键时,
驱动程序的中断服务程序被调用,它会记录数据、唤醒 APP; - ⑤ APP 继续运行它的内核态代码,也就是驱动程序中的函数,复制数据到用户空间并马上返回。
APP执行过程
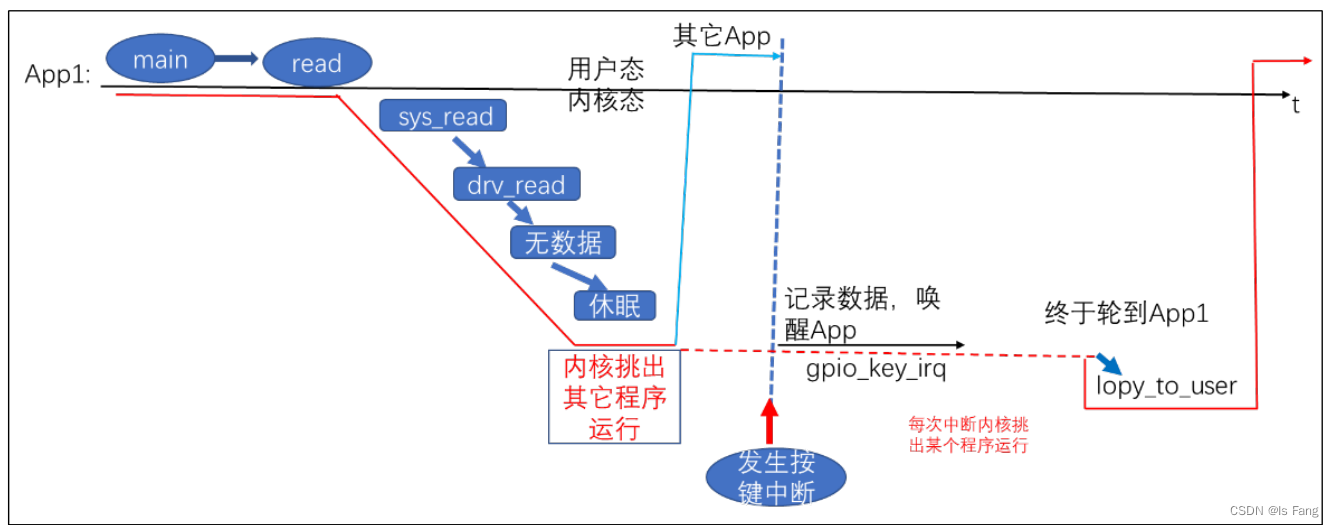
- 驱动中没有数据时,APP1 在内核态
执行到 drv_read 时会休眠。 - 所谓休眠就是把自己的状态改为
非 RUNNING,这样内核的调度器就不会让它运行。 - 当按下按键,驱动程序中的中断服务程序被调用,它会记录数据,并唤醒 APP1。所以唤醒就是把程序的状态改为
RUNNING,这样内核的调度器有合适的时间就会让它运行。 - 当 APP1 再次运行时,就会
继续执行 drv_read 中剩下的代码,把数据复制回用户空间,返回用户空间。 - 在 APP的read到内核态的drv_read函数中(进程上下文),也就是在 APP1 的执行过程中,它是可以休眠的
- 在中断处理函数中(属于中断上下文),不能休眠,也就是不能调用会导致休眠的函数。
内核调度器负责维护该链表,链表里面保存的是线程,如果线程的状态为RUNNING,则会找到合适的时间就会让它运行,如果是非RUNNING,内核的调度器就不会让它运行。
内核函数
参考内核源码: include\linux\wait.h
休眠函数
| 函数 | 说明 |
|---|---|
| wait_event_interruptible(wq, condition) | 休眠,直到 condition 为真;休眠期间是可被打断的,可以被信号打断 |
| wait_event(wq, condition) | 休眠,直到 condition 为真;退出的唯一条件是 condition 为真,信号也不好使 |
| wait_event_interruptible_timeout(wq,condition, timeout) | 休眠,直到 condition 为真或超时;休眠期间是可被打断的,可以被信号打断 |
| wait_event_timeout(wq, condition,timeout) | 休眠,直到 condition 为真;退出的唯一条件是 condition 为真,信号也不好使 |
比较重要的参数就是:
- ① wq:waitqueue,等待队列
- 休眠时除了把程序状态改为非 RUNNING 之外,还要把进程/进程放入wq 中,以后中断服务程序要从 wq 中把它取出来唤醒。
- 没有 wq 的话,茫茫人海中,中断服务程序去哪里找到你?
- ② condition
- 这可以是一个变量,也可以是任何表达式。表示“一直等待,直到condition 为真”
唤醒函数
| 函数 | 说明 |
|---|---|
| wake_up_interruptible(x) | 唤醒 x 队列中状态为“TASK_INTERRUPTIBLE”的线程,只唤醒其中的一个线程 |
| wake_up_interruptible_nr(x, nr) | 唤醒 x 队列中状态为“TASK_INTERRUPTIBLE”的线程,只唤醒其中的 nr 个线程 |
| wake_up_interruptible_all(x) | 唤醒 x 队列中状态为“TASK_INTERRUPTIBLE”的线程,唤醒其中的所有线程 |
| wake_up(x) | 唤 醒 x 队 列 中 状 态 为 “ TASK_INTERRUPTIBLE ” 或“TASK_UNINTERRUPTIBLE”的线程,只唤醒其中的一个线程 |
| wake_up_nr(x, nr) | 唤 醒 x 队 列 中 状 态 为 “ TASK_INTERRUPTIBLE ” 或“TASK_UNINTERRUPTIBLE”的线程,只唤醒其中 nr 个线程 |
| wake_up_all(x) | 唤 醒 x 队 列 中 状 态 为 “ TASK_INTERRUPTIBLE ” 或“TASK_UNINTERRUPTIBLE”的线程,唤醒其中的所有线程 |
休眠与唤醒方式的按键驱动程序(stm32mp157)
驱动程序框架
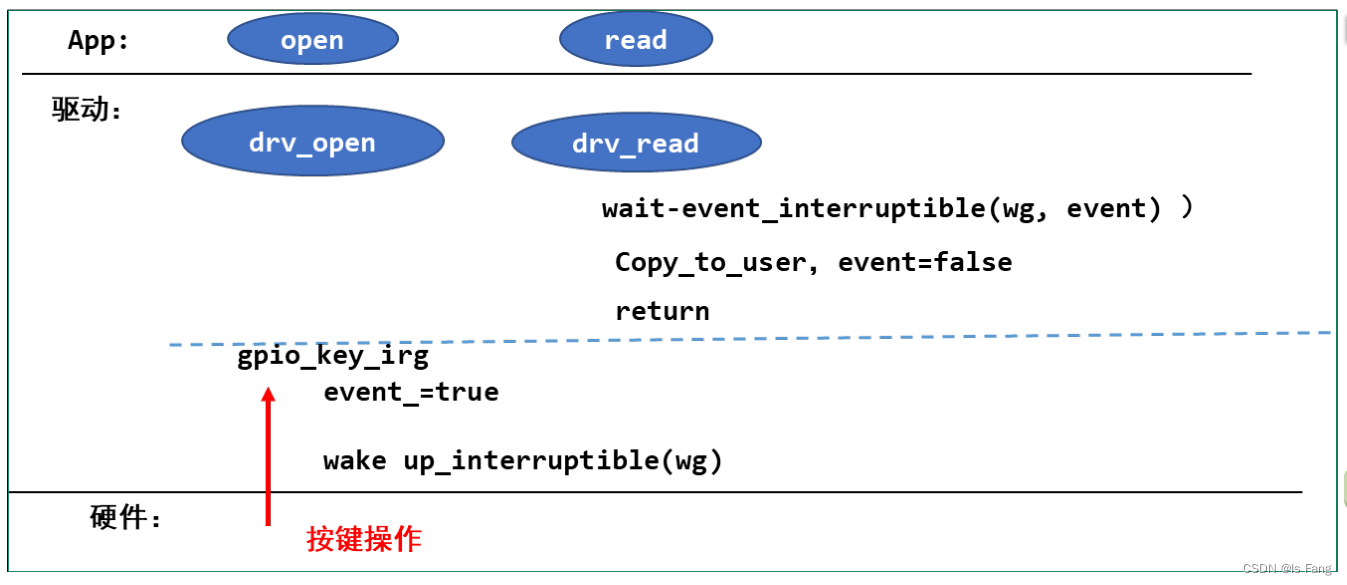
要休眠的线程,放在 wq 队列里,中断处理函数从 wq 队列里把它取出来唤醒。
代码编写内容
- ① 初始化 wq 队列
- ②
在驱动的 read 函数中,调用 wait_event_interruptible:- 它本身会判断 event 是否为 FALSE,如果为 FASLE 表示无数据,则休眠。当从 wait_event_interruptible 返回后,把数据复制回用户空间。
- ③
在中断服务程序里:- 设置 event 为 TRUE,并调用 wake_up_interruptible 唤醒线程。
button_test.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>/** ./button_test /dev/100ask_button0**/
int main(int argc, char **argv)
{int fd;int val;/* 1. 判断参数 */if (argc != 2) {printf("Usage: %s <dev>\n", argv[0]);return -1;}/* 2. 打开文件 */fd = open(argv[1], O_RDWR);if (fd == -1){printf("can not open file %s\n", argv[1]);return -1;}while (1){/* 3. 读文件 */read(fd, &val, 4);printf("get button : 0x%x\n", val);}close(fd);return 0;
}
gpio_key_drv.c
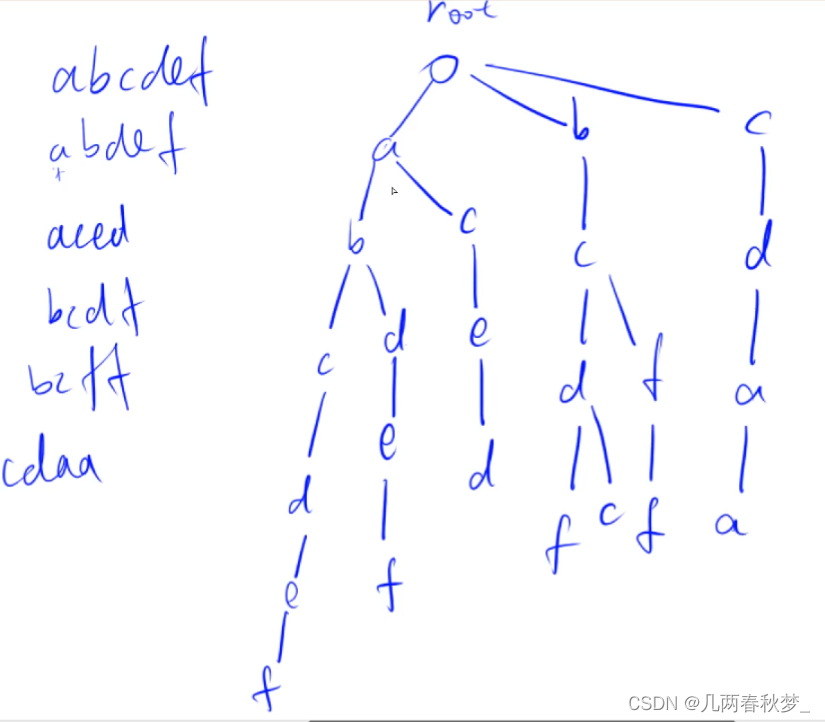
使用环形缓冲区来保存按键值,相比于全局变量,可以避免被覆盖的问题
#include <linux/module.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>struct gpio_key{int gpio;struct gpio_desc *gpiod;int flag;int irq;
} ;static struct gpio_key *gpio_keys_first;/* 主设备号 */
static int major = 0;
static struct class *gpio_key_class;/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN];
static int r, w;//r,w是指针,指向读写的位置#define NEXT_POS(x) ((x+1) % BUF_LEN)static int is_key_buf_empty(void)
{return (r == w);//一开始rw都是0,表示空
}static int is_key_buf_full(void)
{return (r == NEXT_POS(w));//下一个写的位置等于r表示满,容量为128字节的buffer存储到127表示满了
}static void put_key(int key)
{if (!is_key_buf_full()){g_keys[w] = key;//把数据放入w位置w = NEXT_POS(w);//移动w}
}static int get_key(void)
{int key = 0;if (!is_key_buf_empty()){key = g_keys[r];//从r位置读数据r = NEXT_POS(r);//移动r}return key;
}static DECLARE_WAIT_QUEUE_HEAD(gpio_key_wait);//该队列使用宏来初始化/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t gpio_key_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);int err;int key;wait_event_interruptible(gpio_key_wait, !is_key_buf_empty());key = get_key();err = copy_to_user(buf, &key, 4);return 4;
}/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {.owner = THIS_MODULE,.read = gpio_key_drv_read,
};static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{struct gpio_key *gpio_key = dev_id;int val;int key;val = gpiod_get_value(gpio_key->gpiod);printk("key %d %d\n", gpio_key->gpio, val);key = (gpio_key->gpio << 8) | val;put_key(key);wake_up_interruptible(&gpio_key_wait);return IRQ_HANDLED;
}/* 1. 从platform_device获得GPIO* 2. gpio=>irq* 3. request_irq*/
static int gpio_key_probe(struct platform_device *pdev)
{int err;struct device_node *node = pdev->dev.of_node;int count;int i;enum of_gpio_flags flag;printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);count = of_gpio_count(node);if (!count){printk("%s %s line %d, there isn't any gpio available\n", __FILE__, __FUNCTION__, __LINE__);return -1;}gpio_keys_first = kzalloc(sizeof(struct gpio_key) * count, GFP_KERNEL);for (i = 0; i < count; i++){gpio_keys_first[i].gpio = of_get_gpio_flags(node, i, &flag);if (gpio_keys_first[i].gpio < 0){printk("%s %s line %d, of_get_gpio_flags fail\n", __FILE__, __FUNCTION__, __LINE__);return -1;}gpio_keys_first[i].gpiod = gpio_to_desc(gpio_keys_first[i].gpio);gpio_keys_first[i].flag = flag & OF_GPIO_ACTIVE_LOW;gpio_keys_first[i].irq = gpio_to_irq(gpio_keys_first[i].gpio);}for (i = 0; i < count; i++){err = request_irq(gpio_keys_first[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, "100ask_gpio_key", &gpio_keys_first[i]);}/* 注册file_operations */major = register_chrdev(0, "100ask_gpio_key", &gpio_key_drv); /* /dev/gpio_key */gpio_key_class = class_create(THIS_MODULE, "100ask_gpio_key_class");if (IS_ERR(gpio_key_class)) {printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "100ask_gpio_key");return PTR_ERR(gpio_key_class);}device_create(gpio_key_class, NULL, MKDEV(major, 0), NULL, "100ask_gpio_key"); /* /dev/100ask_gpio_key */return 0;}static int gpio_key_remove(struct platform_device *pdev)
{//int err;struct device_node *node = pdev->dev.of_node;int count;int i;device_destroy(gpio_key_class, MKDEV(major, 0));class_destroy(gpio_key_class);unregister_chrdev(major, "100ask_gpio_key");count = of_gpio_count(node);for (i = 0; i < count; i++){free_irq(gpio_keys_first[i].irq, &gpio_keys_first[i]);}kfree(gpio_keys_first);return 0;
}static const struct of_device_id my_keys[] = {{ .compatible = "first_key,gpio_key" },{ },
};/* 1. 定义platform_driver */
static struct platform_driver gpio_keys_driver = {.probe = gpio_key_probe,.remove = gpio_key_remove,.driver = {.name = "my_gpio_key",.of_match_table = my_keys,},
};/* 2. 在入口函数注册platform_driver */
static int __init gpio_key_init(void)
{int err;printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);err = platform_driver_register(&gpio_keys_driver); return err;
}/* 3. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数* 卸载platform_driver*/
static void __exit gpio_key_exit(void)
{printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);platform_driver_unregister(&gpio_keys_driver);
}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(gpio_key_init);
module_exit(gpio_key_exit);MODULE_LICENSE("GPL");
Makefile
# 1. 使用不同的开发板内核时, 一定要修改KERN_DIR
# 2. KERN_DIR中的内核要事先配置、编译, 为了能编译内核, 要先设置下列环境变量:
# 2.1 ARCH, 比如: export ARCH=arm64
# 2.2 CROSS_COMPILE, 比如: export CROSS_COMPILE=aarch64-linux-gnu-
# 2.3 PATH, 比如: export PATH=$PATH:/home/book/100ask_roc-rk3399-pc/ToolChain-6.3.1/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin
# 注意: 不同的开发板不同的编译器上述3个环境变量不一定相同,
# 请参考各开发板的高级用户使用手册KERN_DIR = /home/book/100ask_stm32mp157_pro-sdk/Linux-5.4all:make -C $(KERN_DIR) M=`pwd` modules $(CROSS_COMPILE)gcc -o button_test button_test.c
clean:make -C $(KERN_DIR) M=`pwd` modules cleanrm -rf modules.order button_test# 参考内核源码drivers/char/ipmi/Makefile
# 要想把a.c, b.c编译成ab.ko, 可以这样指定:
# ab-y := a.o b.o
# obj-m += ab.oobj-m += gpio_key_drv.o修改设备树文件

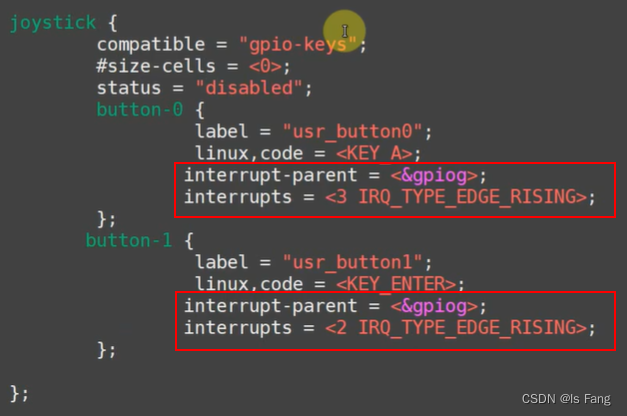
对于一个引脚要用作中断时,
- a) 要通过 PinCtrl 把它设置为 GPIO 功能;【ST 公司对于 STM32MP157 系列芯片,GPIO 为默认模式 不需要再进行配置Pinctrl 信息】
- b) 表明自身:是哪一个 GPIO 模块里的哪一个引脚【修改设备树】
打开内核的设备树文件:arch/arm/boot/dts/stm32mp157c-100ask-512d-lcd-v1.dts
gpio_keys_first {compatible = "first_key,gpio_key";gpios = <&gpiog 3 GPIO_ACTIVE_LOW&gpiog 2 GPIO_ACTIVE_LOW>;
};
与此同时,需要把用到引脚的节点禁用
注意,如果其他设备树文件也用到该节点,需要设置属性为disabled状态,在arch/arm/boot/dts目录下执行如下指令查找哪些设备树用到该节点
grep "&gpiog" * -nr
如果用到该节点,需要添加属性去屏蔽:
status = "disabled";
编译测试
首先要设置 ARCH、CROSS_COMPILE、PATH 这三个环境变量后,进入 ubuntu 上板子内核源码的目录,在Linux内核源码根目录下,执行如下命令即可编译 dtb 文件:
make dtbs V=1
编译好的文件在路径由DTC指定,移植设备树到开发板的共享文件夹中,先保存源文件,然后覆盖源文件,重启后会挂载新的设备树,进入该目录查看是否有新添加的设备节点
cd /sys/firmware/devicetree/base
编译驱动程序,在Makefile文件目录下执行make指令,此时,目录下有编译好的内核模块gpio_key_drv.ko和可执行文件button_test文件移植到开发板上
确定一下烧录系统:cat /proc/mounts,查看boot分区挂载的位置,将其重新挂载在boot分区:mount /dev/mmcblk2p2 /boot,然后将共享文件夹里面的设备树文件拷贝到boot目录下,这样的话设备树文件就在boot目录下
cp /mnt/stm32mp157c-100ask-512d-lcd-v1.dtb /boot
重启后挂载,运行
insmod -f gpio_key_drv.ko // 强制安装驱动程序
ls /dev/my_gpio_key
./button_test /dev/my_gpio_key & //后台运行,此时prink函数打印的内容看不到
然后按下按键
相关文章:
STM32MP157驱动开发——按键驱动(休眠与唤醒)
文章目录 “休眠-唤醒”机制:APP执行过程内核函数休眠函数唤醒函数 休眠与唤醒方式的按键驱动程序(stm32mp157)驱动程序框架button_test.cgpio_key_drv.cMakefile修改设备树文件编译测试 “休眠-唤醒”机制: 当应用程序必须等待某个事件发生,…...

全面解析 SOCKS5 代理与 HTTP 代理的对比与应用
一、 SOCKS5 代理与 HTTP 代理的基本原理 SOCKS5 代理:SOCKS5 是一种网络协议,它可以在传输层(Transport Layer)代理 TCP 和 UDP 请求。SOCKS5 代理不解析请求内容,而是直接将数据中转至目标服务器,支持更广…...

STM32 HEX文件和BIN文件格式区别keil中的配置与生成
一、区别 HEX 文件: 是包括地址信息的,在烧写或下载HEX文件的时候,一般都不需要用户指定地址,因为HEX文件内部的信息已经包括了地址。HEX文件是用ASCII来表示二进制的数值。例如一般8-BIT的二进制数值0x3F,用ASCII来表示就需要分别表示字符3和字符F,每个字符需要一个BYTE…...

RabbitMQ优先级队列的使用
RabbitMQ优先级队列的使用 生产者 public class PriorityQueue {public static void Send(){string path AppDomain.CurrentDomain.BaseDirectory;string tag path.Split(/, \\).Last(s > !string.IsNullOrEmpty(s));Console.WriteLine($"这里是 {tag} 启动了。。&…...
MAC 推送证书不受信任
配置推送证书的时候,一打开就变成不受信任,搜了很多解决版本。 由于苹果修改相关规定,推送证书 打开Apple PKI - Apple 下载AppleWWDRCA文件,选择G4,双击安装之后,证书已经变为受信任。 AppleWWDRCA(Apple Worldwid…...

Gitee创建分支
在使用Gitee进行代码托管时,分支是一个非常重要的概念。它可以让我们在不同的开发阶段、不同的团队成员之间协作开发,提高团队工作效率。因此,下面将介绍如何在Gitee仓库中建立分支。 一、在Gitee上创建新的分支 在讲解如何在Gitee上创建新…...

集群间ssh配置免密登录
ssh免密配置,可以将ssh生成的密钥分发给目标主机,之后再用ssh访问目标主机时就无需输入密码 下面我们来配置用centos71免密登录centos72主机 使用下面指令生成一个密钥 ssh-keygen其中会提示,是否输入密码短语,这里不输入&#…...

YOLOV8改进:CVPR 2023 | SCConv: 即插即用的空间和通道重建卷积
1.该文章属于YOLOV5/YOLOV7/YOLOV8改进专栏,包含大量的改进方式,主要以2023年的最新文章和2022年的文章提出改进方式。 2.提供更加详细的改进方法,如将注意力机制添加到网络的不同位置,便于做实验,也可以当做论文的创新点。 2.涨点效果:添加 SCConv,经过测试,有效涨点。…...

人员定位安全管控系统:提升安全管理水平的智能解决方案
在当今社会,人员安全管理成为各行各业关注的焦点。为了保障人员的安全和提高管理效率,人员定位安全管控系统应运而生。 人员定位安全管控系统采用多种定位技术来实现对人员位置的准确定位,如GPS(全球定位系统)、Wi-Fi…...
数据结构(二)
目录 Trie树 并查集 堆 Trie树 作用:用来高效地存储和查找字符串集合的数据结构 基本形式: 模板代码如下: #include<iostream> using namespace std;const int N 100010;//idx代表当前用到哪个下标 //既是根节点,又是空节点 //cnt存储的是以当前点结尾的…...
推送到logstash(spring boot + logback+ logstash))
logback 自定义log字段(MDC)推送到logstash(spring boot + logback+ logstash)
直接上代码: 1.创建FIlter,往 MDC 里面追加内容 WebFilter Component public class LogBackFilter implements Filter {Overridepublic void init(FilterConfig filterConfig) throws ServletException {}Overridepublic void doFilter(ServletRequest…...

1253. 重构 2 行二进制矩阵
1253. 重构 2 行二进制矩阵 给你一个 2 行 n 列的二进制数组: 矩阵是一个二进制矩阵,这意味着矩阵中的每个元素不是 0 就是 1。第 0 行的元素之和为 upper。第 1 行的元素之和为 lower。第 i 列(从 0 开始编号)的元素之和为 cols…...

安全—01day
文章目录 1. 编码1.1 ASCLL编码1.2 URL编码1.3 Unicode编码1.4 HTML编码1.5 Base64编码 2. form表单2.1 php接收form表单2.2 python接收form表单 1. 编码 1.1 ASCLL编码 ASCII 是基于拉丁字母的一套电脑编码系统,主要用于显示现代英语和其他西欧语言。它是最通用的…...

【Git】Please commit your changes or stash them before you merge的解决方法
背景 我从远程库中clone了一个项目进行开发,修改了一部分代码后,远程库有更新,我想将远程更新拉取下来,并且保留自己的更改,使用git pull origin master命令,有报错: error: Your local chang…...
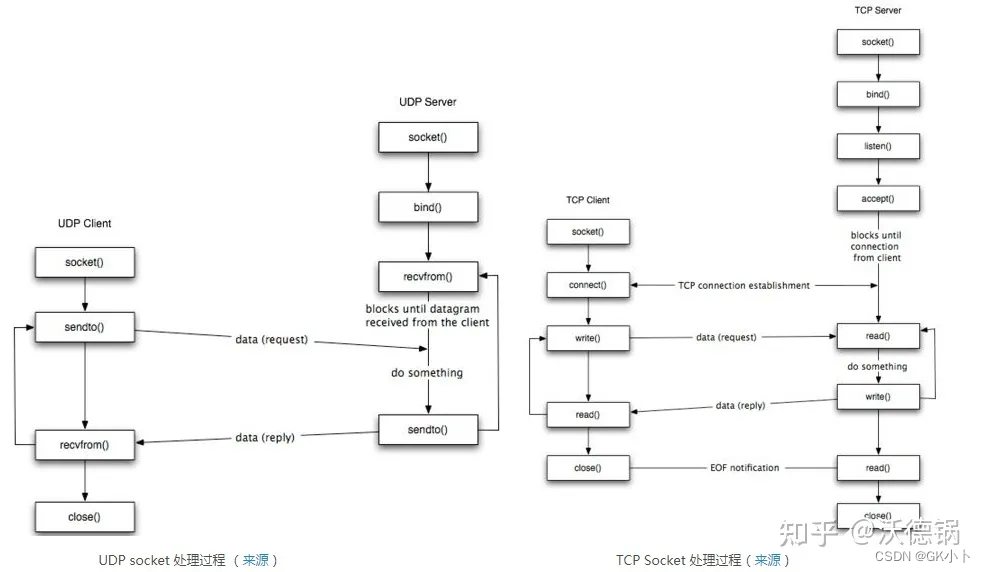
网卡收发包系统结构收发包流程,tcp/ip协议,socket套接字缓冲区,滑动窗口,mtu/mss
MTU和MSS的区别 MTU和MSS的区别 TCP 的 MTU & MSS MTU是在那一层?MSS在那一层? MTU是在数据链路层的载荷大小也就是传给网络层的大小,mss是在传输层的载荷大小也就是传给应用层的大小 mss是根据mtu得到的 1、MTU: Maximu…...

VUE之axios使用,跨域问题,拦截器添加Token
参考资料: 参考视频 视频资料及个人demo Axios中文文档 VUE之基本部署及VScode常用插件 VUE之基本组成和使用 VUE之Bootstrap和Element-UI的使用 准备工作: 关于SpringBoot和SpringCloud的搭建,以及mybatis-plus的整合见本人之前的CSDN博客,下面编写get请求和post请求…...
)
阿里云函数计算签名认证(iOS实现细节备注)
1、使用第三方库 AFNetworking进行网络请求。 2、阿里云函数计算签名认证文档 3、文档中添加 CanonicalizedFCHeaders 可以不用添加,CanonicalizedResource如何没有设置Path,在末尾加入“/”就可以了。 4、主要还是 hmac-sha256 签名认证,在实…...

成都爱尔蔡裕:泡在“糖”里的脆弱血管,暴露在眼睛深处
糖尿病是一组由多病因引起的以慢性高血糖为特征的终身性代谢性疾病。长期血糖增高,大血管、微血管受损并危及心、脑、肾、周围神经、眼睛、足等。医生临床数据显示,糖尿病发病后10年左右,将有30%~40%的患者至少会发生一种并发症&a…...

神经网络小记-过拟合与欠拟合
过拟合 过拟合(Overfitting)是机器学习和深度学习中常见的问题,指模型在训练数据上表现得非常好,但在新数据上表现较差,即模型过度拟合了训练数据的特征,导致泛化能力不足。 解决过拟合的方式包括以下几种…...
外贸行业企业邮箱选择:安全好用的邮箱服务
随着全球化的发展,外贸行业在全球经济中越来越重要。作为一家从事对外贸易的企业,可靠、安全、易用的邮箱系统对于成功的国际交易至关重要。为您的企业选择正确的邮箱解决方案可能是一个挑战。为了使选择过程更加简化,我们在这里提供了一些提…...

ICDM 2024论文精读:MetaSTC如何用‘聚类+元学习’四两拨千斤,大幅提升预测效率?
MetaSTC技术解析:如何用聚类与元学习重构时空预测范式 清晨的城市交通如同人体血管,数据在其中奔流不息。预测这些流动的规律,是智能交通系统的核心挑战。传统深度学习模型往往陷入"算力黑洞"——为了1%的精度提升,需要…...
)
Shell脚本进阶:如何用while循环处理未知次数的任务(避坑指南)
Shell脚本进阶:while循环处理未知次数任务的实战艺术 在Linux系统管理和自动化运维领域,Shell脚本是不可或缺的利器。当我们面对需要重复执行但次数未知的任务时,while循环展现出其独特的价值。与for循环不同,while循环不依赖预先…...

为什么我不建议你手动升级Ubuntu的GLIBC?系统库兼容性深度解析
为什么我不建议你手动升级Ubuntu的GLIBC?系统库兼容性深度解析 在Linux系统的日常运维中,GLIBC(GNU C Library)作为最基础的系统库之一,其重要性不言而喻。它不仅是C语言程序运行的基础,更是几乎所有系统工…...

实战笔记:从零到一完成裕泰微PHY芯片的驱动适配与设备树集成
1. 初识裕泰微PHY芯片与开发环境搭建 第一次拿到YT8521这颗PHY芯片时,说实话有点懵。这个比指甲盖还小的芯片,居然要负责整个网络通信的物理层信号转换。我用的开发板是BCM47722L主控,通过RGMII接口直连YT8521。这里有个新手容易忽略的点&…...

工业数据 vs. 传统资源:为什么数据才是未来的稀缺资产
从成本投入到战略资产——工业数据能成为"新石油"吗? “Data is the new oil”,数据是新石油这个比喻,最早由英国数学家 Clive Humby 在 2006 年提出。但真正让这一概念深入人心的,是《经济学人》2017 年的封面文章&am…...

为什么ResNet的152层比VGG16快?图解残差连接的计算优化与内存管理
为什么ResNet的152层比VGG16快?图解残差连接的计算优化与内存管理 在深度学习领域,网络深度与计算效率似乎总是一对矛盾体——直到ResNet的出现打破了这一认知。当152层的ResNet在ImageNet竞赛中以更低计算量击败16层的VGG时,整个计算机视觉…...

Realistic Vision V5.1虚拟摄影棚教程:自定义ControlNet姿势控制技巧
Realistic Vision V5.1虚拟摄影棚教程:自定义ControlNet姿势控制技巧 1. 项目概述 Realistic Vision V5.1虚拟摄影棚是基于当前最先进的写实风格生成模型开发的本地化工具,能够帮助用户轻松创建专业级摄影作品。这个工具特别适合需要高质量人像生成但又…...

新手零基础入门:在快马平台上运行你的第一个yolov8检测程序
今天想和大家分享一个特别适合机器学习新手的实践项目——用yolov8完成第一个目标检测程序。作为刚接触计算机视觉的小白,我最初被各种环境配置和术语搞得晕头转向,直到发现用InsCode(快马)平台可以跳过繁琐的步骤,直接体验模型效果。 为什么…...

2026网文圈变天!顶配AI写小说神器实测:除了炼字工坊,全是虚火?
搞了半个月实测,废了三个起点号,我终于把这套2026网文顶配AI组合拳盘清楚了。 说实话,现在市面上打着“AI写小说”旗号的工具,90%都是割韭菜的套壳货。 点开一看,全是GPT-4o或者过时的模型,写出来的东西一股…...

别再只写Prompt了!用Cursor Skills给你的AI助手装上‘前端设计说明书’
别再只写Prompt了!用Cursor Skills给你的AI助手装上‘前端设计说明书’ 作为一名长期与AI代码生成工具打交道的前端开发者,我深刻理解那种面对千篇一律的"AI感"设计时的无奈。每次都要花费大量时间编写冗长的Prompt,结果生成的代码…...