STM32MP157驱动开发——按键驱动(异步通知)
文章目录
- “异步通知 ”机制:
- 信号的宏定义:
- 信号注册
- APP执行过程
- 驱动编程做的事
- 应用编程做的事
- 异步通知方式的按键驱动程序(stm32mp157)
- button_test.c
- gpio_key_drv.c
- Makefile
- 修改设备树文件
- 编译测试
“异步通知 ”机制:
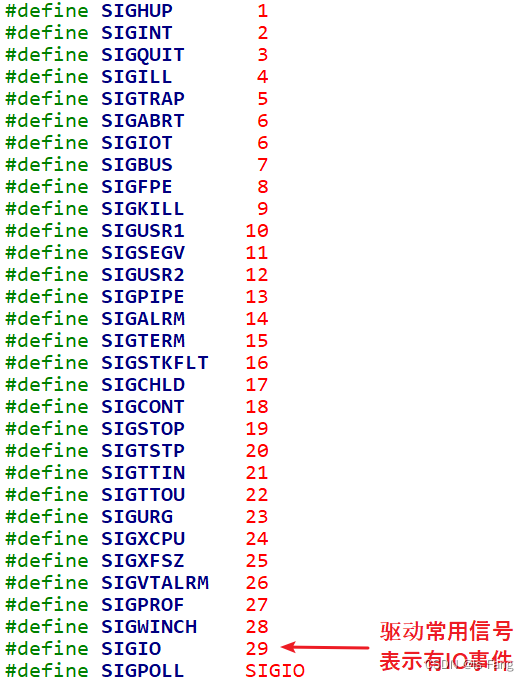
信号的宏定义:
Linux 系统中也有很多信号,在 Linux 内核源文件 include\uapi\asm-generic\signal.h 中,有很多信号的宏定义:
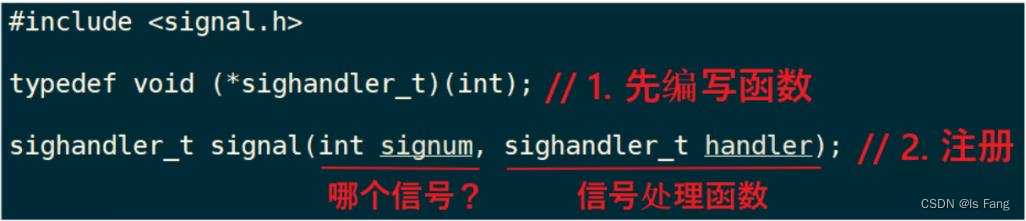
信号注册
就 APP 而言,你想处理 SIGIO 信息,那么需要提供信号处理函数,并且要跟 SIGIO 挂钩。这可以通过一个 signal 函数来“给某个信号注册处理函数”,用法如下:
APP执行过程
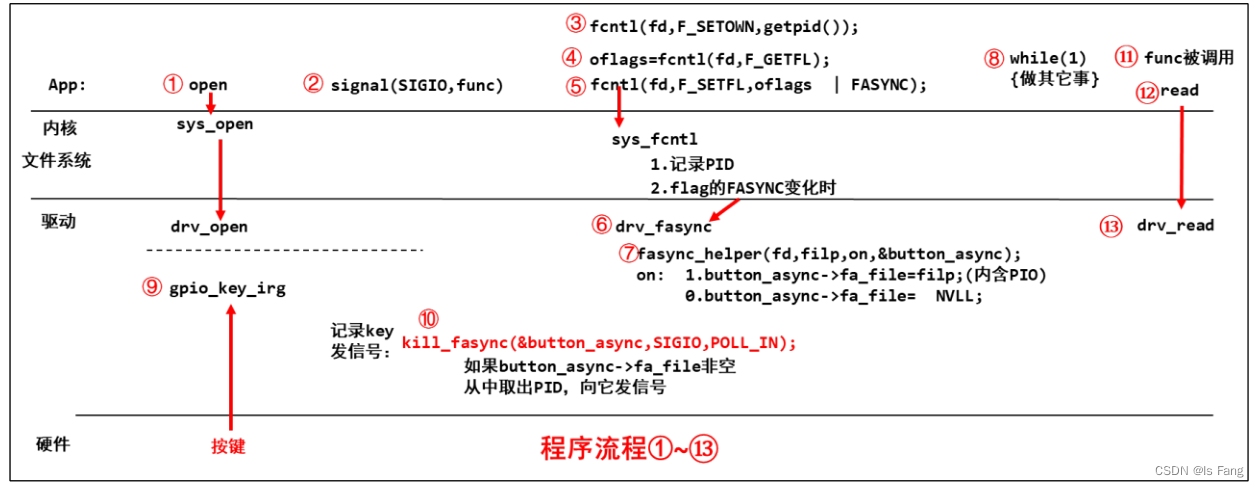
重点从②开始:
② APP 给 SIGIO 这个信号注册信号处理函数 func,以后 APP 收到 SIGIO信号时,这个函数会被自动调用;
③ 把 APP 的 PID(进程 ID)告诉驱动程序,这个调用不涉及驱动程序,在内核的文件系统层次记录 PID;
④ 读取驱动程序文件 Flag;
⑤ 设置 Flag 里面的 FASYNC 位为 1:当 FASYNC 位发生变化时,会导致驱动程序的 drv_fasync 被调用;
⑥⑦ 调 用 faync_helper , 它会根据 FAYSNC 的值决定是否设置button_async->fa_file=驱动文件 filp:驱动文件 filp 结构体里面含有之前设置的 PID。
⑧ APP 可以做其他事;
⑨⑩ 按下按键,发生中断,驱动程序的中断服务程序被调用,里面调用kill_fasync 发信号;
⑪⑫⑬ APP 收到信号后,它的信号处理函数被自动调用,可以在里面调用 read 函数读取按键。
驱动编程做的事
使用异步通知时,驱动程序的核心有 2个:
- ① 提供对应的 drv_fasync 函数;
- ② 并在合适的时机发信号。
drv_fasync 函数很简单,调用 fasync_helper 函数就可以,如下:
static struct fasync_struct *button_async;
static int drv_fasync (int fd, struct file *filp, int on)
{return fasync_helper (fd, filp, on, &button_async);
}
fasync_helper 函数会分配 、构造一个fasync_struct 结构体button_async:
- 驱动文件的 flag 被设置为 FAYNC 时:
button_async->fa_file = filp; // filp 表示驱动程序文件,里面含有之前设置的 PID
- 驱动文件被设置为非 FASYNC 时:
button_async->fa_file = NULL;
在 GPIO 中断服务程序中发信号:想发送信号时,使用 button_async 作为参数就可以,它里面“可能”含有 PID。
kill_fasync (&button_async, SIGIO, POLL_IN);
- 第 1 个参数:button_async->fa_file 非空时,可以从中得到 PID,表示发给哪一个 APP;
- 第 2 个参数表示发什么信号:SIGIO;
- 第 3 个参数表示为什么发信号:POLL_IN,有数据可以读了。(APP 用不到这个参数)
应用编程做的事
应用程序要做的事情有这几件:
① 编写信号处理函数:
static void sig_func(int sig)
{int val;read(fd, &val, 4);printf("get button : 0x%x\n", val);
}
② 注册信号处理函数:
signal(SIGIO, sig_func);
③ 打开驱动:
fd = open(argv[1], O_RDWR);
④ 把进程 ID 告诉驱动:
fcntl(fd, F_SETOWN, getpid());
⑤ 使能驱动的 FASYNC 功能:
flags = fcntl(fd, F_GETFL);
fcntl(fd, F_SETFL, flags | FASYNC);
异步通知方式的按键驱动程序(stm32mp157)
button_test.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>static int fd;
static void sig_func(int sig)
{int val;read(fd, &val, 4);printf("get button : 0x%x\n", val);
}/** ./button_test /dev/my_gpio_key**/
int main(int argc, char **argv)
{int val;struct pollfd fds[1];int timeout_ms = 5000;int ret;int flags;/* 1. 判断参数 */if (argc != 2) {printf("Usage: %s <dev>\n", argv[0]);return -1;}signal(SIGIO, sig_func);/* 2. 打开文件 */fd = open(argv[1], O_RDWR);if (fd == -1){printf("can not open file %s\n", argv[1]);return -1;}//设置flag为FASYNCfcntl(fd, F_SETOWN, getpid());flags = fcntl(fd, F_GETFL);fcntl(fd, F_SETFL, flags | FASYNC);while (1){//验证 异步通知,不会一直占用cpu printf("test fasync \n");sleep(2);}close(fd);return 0;
}
gpio_key_drv.c
#include <linux/module.h>
#include <linux/poll.h>#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>struct gpio_key{int gpio;struct gpio_desc *gpiod;int flag;int irq;
} ;static struct gpio_key *gpio_keys_first;/* 主设备号 */
static int major = 0;
static struct class *gpio_key_class;/* 环形缓冲区 */
#define BUF_LEN 128
static int g_keys[BUF_LEN];
static int r, w;struct fasync_struct *button_fasync;#define NEXT_POS(x) ((x+1) % BUF_LEN)static int is_key_buf_empty(void)
{return (r == w);
}static int is_key_buf_full(void)
{return (r == NEXT_POS(w));
}static void put_key(int key)
{if (!is_key_buf_full()){g_keys[w] = key;w = NEXT_POS(w);}
}static int get_key(void)
{int key = 0;if (!is_key_buf_empty()){key = g_keys[r];r = NEXT_POS(r);}return key;
}static DECLARE_WAIT_QUEUE_HEAD(gpio_key_wait);/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t gpio_key_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);int err;int key;wait_event_interruptible(gpio_key_wait, !is_key_buf_empty());key = get_key();err = copy_to_user(buf, &key, 4);return 4;
}static unsigned int gpio_key_drv_poll(struct file *fp, poll_table * wait)
{printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);poll_wait(fp, &gpio_key_wait, wait);return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}static int gpio_key_drv_fasync(int fd, struct file *file, int on)
{if (fasync_helper(fd, file, on, &button_fasync) >= 0)return 0;elsereturn -EIO;
}/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {.owner = THIS_MODULE,.read = gpio_key_drv_read,.poll = gpio_key_drv_poll,.fasync = gpio_key_drv_fasync,
};static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{struct gpio_key *gpio_key = dev_id;int val;int key;val = gpiod_get_value(gpio_key->gpiod);printk("key %d %d\n", gpio_key->gpio, val);key = (gpio_key->gpio << 8) | val;put_key(key);wake_up_interruptible(&gpio_key_wait);kill_fasync(&button_fasync, SIGIO, POLL_IN);return IRQ_HANDLED;
}/* 1. 从platform_device获得GPIO* 2. gpio=>irq* 3. request_irq*/
static int gpio_key_probe(struct platform_device *pdev)
{int err;struct device_node *node = pdev->dev.of_node;int count;int i;enum of_gpio_flags flag;printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);count = of_gpio_count(node);if (!count){printk("%s %s line %d, there isn't any gpio available\n", __FILE__, __FUNCTION__, __LINE__);return -1;}gpio_keys_first= kzalloc(sizeof(struct gpio_key) * count, GFP_KERNEL);for (i = 0; i < count; i++){gpio_keys_first[i].gpio = of_get_gpio_flags(node, i, &flag);if (gpio_keys_first[i].gpio < 0){printk("%s %s line %d, of_get_gpio_flags fail\n", __FILE__, __FUNCTION__, __LINE__);return -1;}gpio_keys_first[i].gpiod = gpio_to_desc(gpio_keys_first[i].gpio);gpio_keys_first[i].flag = flag & OF_GPIO_ACTIVE_LOW;gpio_keys_first[i].irq = gpio_to_irq(gpio_keys_first[i].gpio);}for (i = 0; i < count; i++){err = request_irq(gpio_keys_first[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, "my_gpio_key", &gpio_keys_first[i]);}/* 注册file_operations */major = register_chrdev(0, "my_gpio_key", &gpio_key_drv); /* /dev/gpio_key */gpio_key_class = class_create(THIS_MODULE, "my_gpio_key_class");if (IS_ERR(gpio_key_class)) {printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);unregister_chrdev(major, "my_gpio_key");return PTR_ERR(gpio_key_class);}device_create(gpio_key_class, NULL, MKDEV(major, 0), NULL, "my_gpio_key"); /* /dev/my_gpio_key */return 0;}static int gpio_key_remove(struct platform_device *pdev)
{//int err;struct device_node *node = pdev->dev.of_node;int count;int i;device_destroy(gpio_key_class, MKDEV(major, 0));class_destroy(gpio_key_class);unregister_chrdev(major, "my_gpio_key");count = of_gpio_count(node);for (i = 0; i < count; i++){free_irq(gpio_keys_first[i].irq, &gpio_keys_first[i]);}kfree(gpio_keys_first);return 0;
}static const struct of_device_id my_keys[] = {{ .compatible = "first_key,gpio_key" },{ },
};/* 1. 定义platform_driver */
static struct platform_driver gpio_keys_driver = {.probe = gpio_key_probe,.remove = gpio_key_remove,.driver = {.name = "my_gpio_key",.of_match_table = my_keys,},
};/* 2. 在入口函数注册platform_driver */
static int __init gpio_key_init(void)
{int err;printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);err = platform_driver_register(&gpio_keys_driver); return err;
}/* 3. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数* 卸载platform_driver*/
static void __exit gpio_key_exit(void)
{printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);platform_driver_unregister(&gpio_keys_driver);
}/* 7. 其他完善:提供设备信息,自动创建设备节点 */module_init(gpio_key_init);
module_exit(gpio_key_exit);MODULE_LICENSE("GPL");Makefile
# 1. 使用不同的开发板内核时, 一定要修改KERN_DIR
# 2. KERN_DIR中的内核要事先配置、编译, 为了能编译内核, 要先设置下列环境变量:
# 2.1 ARCH, 比如: export ARCH=arm64
# 2.2 CROSS_COMPILE, 比如: export CROSS_COMPILE=aarch64-linux-gnu-
# 2.3 PATH, 比如: export PATH=$PATH:/home/book/100ask_roc-rk3399-pc/ToolChain-6.3.1/gcc-linaro-6.3.1-2017.05-x86_64_aarch64-linux-gnu/bin
# 注意: 不同的开发板不同的编译器上述3个环境变量不一定相同,
# 请参考各开发板的高级用户使用手册KERN_DIR = /home/book/100ask_stm32mp157_pro-sdk/Linux-5.4all:make -C $(KERN_DIR) M=`pwd` modules $(CROSS_COMPILE)gcc -o button_test button_test.c
clean:make -C $(KERN_DIR) M=`pwd` modules cleanrm -rf modules.order button_test# 参考内核源码drivers/char/ipmi/Makefile
# 要想把a.c, b.c编译成ab.ko, 可以这样指定:
# ab-y := a.o b.o
# obj-m += ab.oobj-m += gpio_key_drv.o
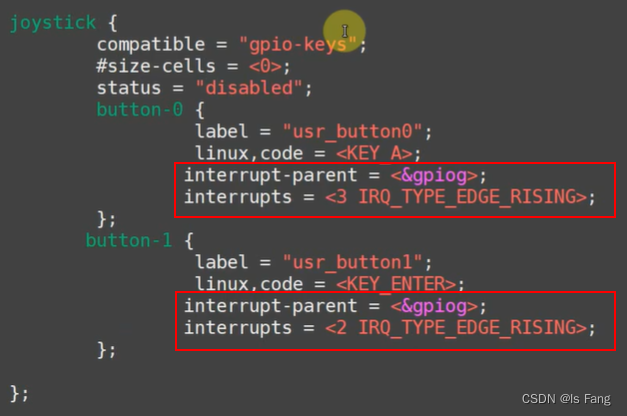
修改设备树文件

对于一个引脚要用作中断时,
- a) 要通过 PinCtrl 把它设置为 GPIO 功能;【ST 公司对于 STM32MP157 系列芯片,GPIO 为默认模式 不需要再进行配置Pinctrl 信息】
- b) 表明自身:是哪一个 GPIO 模块里的哪一个引脚【修改设备树】
打开内核的设备树文件:arch/arm/boot/dts/stm32mp157c-100ask-512d-lcd-v1.dts
gpio_keys_first {compatible = "first_key,gpio_key";gpios = <&gpiog 3 GPIO_ACTIVE_LOW&gpiog 2 GPIO_ACTIVE_LOW>;
};
与此同时,需要把用到引脚的节点禁用
注意,如果其他设备树文件也用到该节点,需要设置属性为disabled状态,在arch/arm/boot/dts目录下执行如下指令查找哪些设备树用到该节点
grep "&gpiog" * -nr
如果用到该节点,需要添加属性去屏蔽:
status = "disabled";
编译测试
首先要设置 ARCH、CROSS_COMPILE、PATH 这三个环境变量后,进入 ubuntu 上板子内核源码的目录,在Linux内核源码根目录下,执行如下命令即可编译 dtb 文件:
make dtbs V=1
编译好的文件在路径由DTC指定,移植设备树到开发板的共享文件夹中,先保存源文件,然后覆盖源文件,重启后会挂载新的设备树,进入该目录查看是否有新添加的设备节点
cd /sys/firmware/devicetree/base
编译驱动程序,在Makefile文件目录下执行make指令,此时,目录下有编译好的内核模块gpio_key_drv.ko和可执行文件button_test文件移植到开发板上
确定一下烧录系统:cat /proc/mounts,查看boot分区挂载的位置,将其重新挂载在boot分区:mount /dev/mmcblk2p2 /boot,然后将共享文件夹里面的设备树文件拷贝到boot目录下,这样的话设备树文件就在boot目录下
cp /mnt/stm32mp157c-100ask-512d-lcd-v1.dtb /boot
重启后挂载,运行
insmod -f gpio_key_drv.ko // 强制安装驱动程序
ls /dev/my_gpio_key
./button_test /dev/my_gpio_key & //后台运行,此时prink函数打印的内容看不到
然后按下按键
相关文章:
STM32MP157驱动开发——按键驱动(异步通知)
文章目录 “异步通知 ”机制:信号的宏定义:信号注册 APP执行过程驱动编程做的事应用编程做的事异步通知方式的按键驱动程序(stm32mp157)button_test.cgpio_key_drv.cMakefile修改设备树文件编译测试 “异步通知 ”机制: 信号的宏定义&#x…...

医疗器械维修工程师心得
彩虹医械维修技能班9月将开展本年第三期长期班,目前咨询人员也陆续多了起来,很多刚了解到医疗行业的,自身也没有多少相关的基础,在咨询时会问到没有基础能否学的会? 做了这行业的都知道,无论多么复杂的设备…...
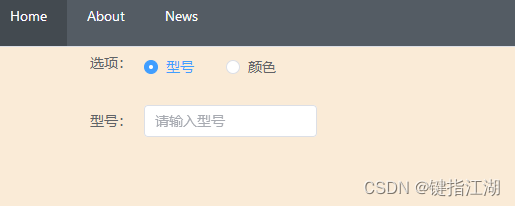
Vue3 Radio单选切换展示不同内容
Vue3 Radio单选框切换展示不同内容 环境:vue3tsviteelement plus 技巧:v-if,v-show的使用 实现功能:点击单选框展示不同的输入框 效果实现前的代码: <template><div class"home"><el-row …...

FreeRTOS之二值信号量
什么是信号量? 信号量(Semaphore),是在多任务环境下使用的一种机制,是可以用来保证两个或多个关键代 码段不被并发调用。 信号量这个名字,我们可以把它拆分来看,信号可以起到通知信号的作用&am…...

ChatGPT API进阶调用指南
原文:ChatGPT API进阶调用指南 ChatGPT API 进阶调用指南 ChatGPT API 是基于 OpenAI 的 GPT模型的一个强大工具,可以用于构建各种对话式应用。以下是一些使用 Markdown 语法的进阶调用指南,以帮助您更好地利用 ChatGPT API。 设置用户角色…...

人工智能术语翻译(四)
文章目录 摘要MNOP 摘要 人工智能术语翻译第四部分,包括I、J、K、L开头的词汇! M 英文术语中文翻译常用缩写备注Machine Learning Model机器学习模型Machine Learning机器学习ML机器学习Machine Translation机器翻译MTMacro Average宏平均Macro-F1宏…...

kubernetes持久化存储卷
kubernetes持久化存储卷 kubernetes持久化存储卷一、存储卷介绍二、存储卷的分类三、存储卷的选择四、本地存储卷之emptyDir五、本地存储卷之 hostPath六、网络存储卷之nfs七、PV(持久存储卷)与PVC(持久存储卷声明)7.1 认识pv与pvc7.2 pv与pvc之间的关系7.3 实现nfs类型pv与pvc…...

【Rust笔记】意译解构 Object Safety for trait
意译解构Object Safety for trait 借助【虚表vtable】对被调用成员函数【运行时内存寻址】的作法允许系统编程语言Rust模仿出OOP高级计算机语言才具备的【专用多态Ad-hoc Polymorphism】特性。 计算机高级语言中的“多态”术语是一个泛指。它通常可被细化为 基于继承关系的“子…...

Spring Boot单元测试入门指南
Spring Boot单元测试入门指南 JUnit是一个成熟和广泛应用的Java单元测试框架,它提供了丰富的功能和灵活的扩展机制,可以帮助开发人员编写高质量的单元测试。通过JUnit,开发人员可以更加自信地进行重构、维护和改进代码,同时提高代…...

《面试1v1》如何能从Kafka得到准确的信息
🍅 作者简介:王哥,CSDN2022博客总榜Top100🏆、博客专家💪 🍅 技术交流:定期更新Java硬核干货,不定期送书活动 🍅 王哥多年工作总结:Java学习路线总结…...
2023秋招面试题持续更新中。。。
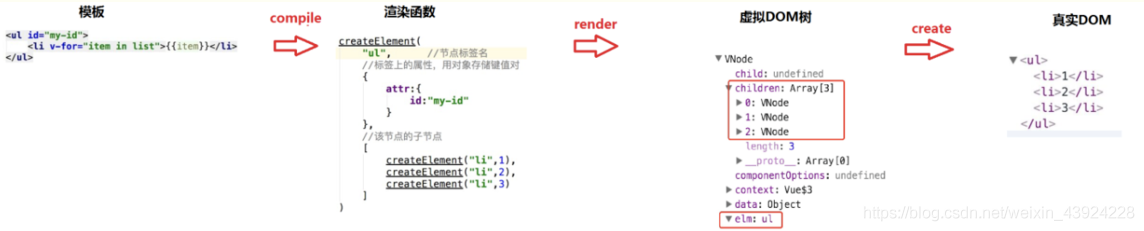
目录 1.八股文渐进式MVVM三次握手,四次挥手viteajax组件化和模块化虚拟dom原理流程浏览器内核浏览器渲染过程回流和重绘nextTick 2.项目相关1.声明式导航和编程式导航重写push和replace方法:性能优化图片懒加载路由懒加载 http请求方式 1.八股文 渐进式…...

Java | 数组排序算法
一、冒泡排序 冒泡排序的基本思想是对比相邻的元素值,如果满足条件就交换元素值,把较小的元素移到数组前面,把较大的元素移到数组后面(也就是交换两个元素的位置),这样较小的元素就像气泡一样从底部升到顶…...

android studio 连接SQLite数据库并实现增删改查功能
功能代码及调试代码 package com.example.bankappdemo;import android.annotation.SuppressLint; import android.content.ContentValues; import android.database.sqlite.SQLiteDatabase; import android.os.Bundle; import android.util.Log; import android.view.View; im…...

跑步适合戴什么样的耳机、最好的跑步耳机推荐
每个人对于运动的方式都不尽相同,但大多数热爱运动的朋友都离不开音乐的陪伴。运动和带有节奏感的音乐能够激发我们更多的热情和动力。特别是在夏日的时候,我非常喜欢跑步。在酷热的天气里,如果没有音乐的伴随,跑步会变得单调乏味…...
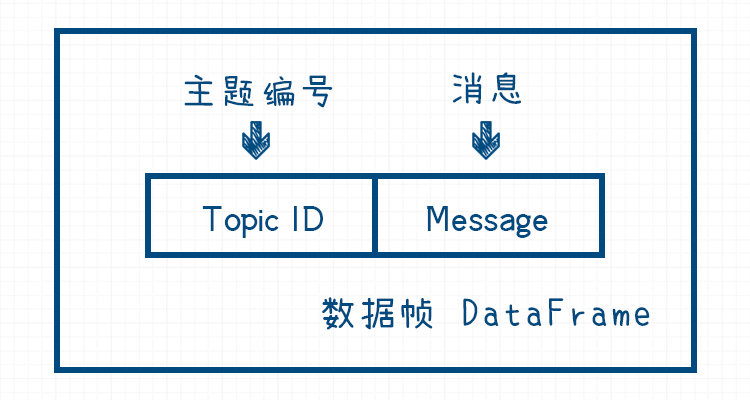
物联网的通信协议
物联网的通信协议 目录 物联网的通信协议一、UART串口通信1.1 串口通信1.2 异步收发1.3 波特率1.4 串口通信协议的数据帧1.5 优缺点1.5.1 优点1.5.2 缺点 二、I^2^C2.1 I^2^C2.2 I^2^C2.3 数据有效性2.4 起始条件S和停止条件P2.5 数据格式2.6 协议数据单元PDU2.7 优缺点2.7.1 优…...
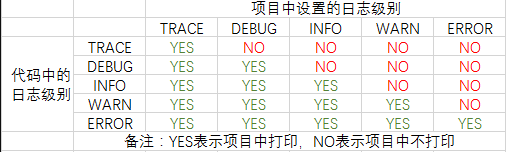
【业务功能篇56】SpringBoot 日志SLF4J Logback
3.5.1 日志框架分类与选择 3.5.1.1 日志框架的分类 日志门面 (日志抽象)日志实现JCL(Jakarta Commons Logging) SLF4J(Simple Logging Facade for Java)Jul(Java Util Logging) , Log4j , Log4j2 , Logback 记录型日志框架 Jul (Java Util Logging):JDK中的日志…...
leetcode 53. 最大子数组和
2023.7.28 要求找最大和的 连续子数组, 我的思路是用一个temp记录局部最优值,用ans记录全局最优值。 然后在每次for循环进行一个判断:当前遍历元素temp值 是否大于当前遍历元素的值,如果大于,说明temp值是帮了正忙的&a…...

js 下载url返回的excel数据,并解析为json
XLSX GitHub地址:https://github.com/SheetJS/sheetjs/blob/github/dist/xlsx.full.min.js 需要先引入:XLSX.full.min.js // 下载文件的请求 fetch(downloadFileUrl).then(response > {return rsp.blob() }).then(data > {let reader new FileR…...

图文教程:使用 Photoshop、3ds Max 和 After Effects 创建被风暴摧毁的小屋
推荐: NSDT场景编辑器助你快速搭建可二次开发的3D应用场景 1. 在 Photoshop 中设置图像 步骤 1 打开 Photoshop。 打开 Photoshop 步骤 2 我已经将小屋的图像导入到Photoshop中以演示 影响。如果您愿意,可以使用其他图像。 图片导入 步骤 3 由于小…...
学习Maven Web 应用
Maven Web 应用 本章节我们将学习如何使用版本控制系统 Maven 来管理一个基于 web 的项目,如何创建、构建、部署已经运行一个 web 应用。 创建 Web 应用 我们可以使用 maven-archetype-webapp 插件来创建一个简单的 Java web 应用。 打开命令控制台,…...

Claude in Excel:原生集成的AI表格协作者
1. 项目概述:这不是插件,是Excel里长出来的AI同事“Claude in Excel”这个标题刚看到时,我下意识点开几个技术社区翻了一圈,发现多数人第一反应是:“又一个AI插件?”——其实完全不是。它根本没走传统Offic…...

Allegro等长设置翻车实录:拓扑模板法的3个坑与手工PinPair的救赎
Allegro等长设计避坑指南:从拓扑模板到精准PinPair的实战演进在高速PCB设计中,等长匹配如同精密钟表里的齿轮啮合,差之毫厘便可能导致整个系统时序崩塌。当设计从简单的点对点结构升级到多负载复杂拓扑时,Allegro用户常陷入两种典…...

如何用SMUDebugTool彻底掌控你的AMD Ryzen处理器性能调优
如何用SMUDebugTool彻底掌控你的AMD Ryzen处理器性能调优 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https://gitcode.co…...

智能手机相机光谱特性测量与多光谱成像技术
1. 智能手机相机光谱特性测量基础智能手机相机的光谱灵敏度函数(Spectral Sensitivity Function, SSF)和透射率函数是计算摄影领域的核心参数,它们决定了设备对光信号的响应特性。准确获取这些参数对色彩还原、光谱重建和白平衡校准等任务至关重要。1.1 光谱灵敏度函…...

【2026最新】应对Turnitin查重:实测5大英文查降AI宝藏工具,一站式搞定初稿
现在的英文初稿,无论是期刊文章、SCI 还是普通的 Course Essay,基本都需要评估内容的原创度,进行文章 AI 率检测。很多伙伴以为纯手敲就能过,结果一查数据依然不尽如人意。 针对英文内容,咱们必须使用专门的英文检测和…...

智慧树自动刷课助手:3步告别手动操作的学习效率工具
智慧树自动刷课助手:3步告别手动操作的学习效率工具 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 还在为智慧树平台的重复刷课操作而烦恼吗?智…...

[智能体-81]:工程化智能体 = 模型做脑力拆解 + 框架做流程落地。前者是决策者,后者是管理者,tools/function call是内部员工;mcp server是外部资源;
一、全角色人设 & 对应技术组件角色定位对应技术模块核心职责决策者(脑力大脑)大模型 LLM理解目标、任务拆解、逻辑判断、分支决策、内容生成,负责 “想方案、定步骤”管理者(流程总管)智能体编排框架(…...

FeHelper前端助手:30+开发工具集,让你的浏览器变身效率神器
FeHelper前端助手:30开发工具集,让你的浏览器变身效率神器 【免费下载链接】FeHelper 😍FeHelper--Web前端助手(Awesome!Chrome & Firefox & MS-Edge Extension, All in one Toolbox!) 项目地址:…...

中兴光猫终极管理指南:解锁工厂模式与Telnet权限的实战教程
中兴光猫终极管理指南:解锁工厂模式与Telnet权限的实战教程 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 掌握中兴光猫的设备管理和权限获取能力是网络管理员和技术爱好者…...

WarcraftHelper终极指南:魔兽争霸3兼容性问题一站式解决方案
WarcraftHelper终极指南:魔兽争霸3兼容性问题一站式解决方案 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为《魔兽争霸3》在现代电…...