落地 ORB角点检测与sift检测
ORB角点检测
可以说ORB是由FAST、灰度质心和BRIEF等技术组合优化形成的,不过更准确地说,ORB是在FAST特征检测算法基础上,结合了灰度质心确定方向以及改进后的BRIEF描述子等技术形成的,以下是具体分析:
• FAST特征检测:ORB算法首先采用FAST算法来检测图像中的特征点。FAST算法通过判断以某个像素点为中心的圆周上的像素点灰度值与该中心像素点灰度值的关系,快速地筛选出可能的特征点,具有速度快的优点。
• 灰度质心确定方向:ORB利用灰度质心法为FAST检测出的特征点计算方向。通过计算特征点邻域内的灰度质心,确定从特征点到质心的向量方向,以此作为特征点的主方向,解决了BRIEF描述子不具有旋转不变性的问题。
• 改进的BRIEF描述子:ORB采用了改进的BRIEF描述子,称为rBRIEF。在确定了特征点的方向后,根据该方向对选取的点对进行旋转,使得描述子具有旋转不变性。同时,还对BRIEF描述子进行了其他一些优化,如对特征点的尺度进行考虑等,提高了描述子的性能。
SIFT角点检测
检测步骤
• 尺度空间极值检测:构建图像的高斯金字塔,通过对原始图像与不同尺度倍率的高斯模糊进行卷积,将相邻的高斯模糊影像两两相减得到高斯差(DoG)影像。在DoG影像中查找极大值和极小值,这些极值点即为可能的关键点。
• 关键点定位:通过关键点附近的像素信息、关键点的尺寸和主曲率来进一步定位各个关键点,计算关键点的主曲率,消除位于边缘或易受噪音干扰、位置不合适的关键点。
• 方向定向:对经过高斯模糊处理后的影像,计算相邻像素的梯度量和方向,为每个关键点建立一个以10度为单位的36条直方图,直方图中最大值的方向成为关键点的方向。若最大值与局部极大值之间的差距不超过20%,则认为关键点包含多个方向,并创建一个新的关键点。
• 生成描述子:以关键点为中心取16×16的区域,将其划分为4×4的子区域,每个子区域内建立一个八方向的直方图,计算每个像素的梯度量值大小与方向并添加到相应的子区域直方图中,最终产生一个128维的数据集,将其归一化为单位向量作为关键点的描述子。
应用场景
• 物体识别:能识别独特的关键点,不受移动、旋转、缩放等因素影响,可用于从图像或视频中识别特定物体。
• 图像拼接:通过检测不同图像中的匹配特征点,可实现非全景图像的自动全景重建。
• 三维重建:从多个视角的二维图像中提取SIFT特征,可用于重建出三维物体的形状和结构。
• 机器人导航与地图构建:帮助机器人识别环境中的关键
两者区别
ORB和SIFT的比较如下:
计算速度
• ORB:基于FAST角点检测和BRIEF描述子,二者都是基于二进制操作,计算速度快。
• SIFT:需要构建尺度空间、进行极值点检测等复杂操作,计算量较大,速度相对较慢。
特征鲁棒性
• ORB:具有一定的旋转不变性,但尺度不变性相对较弱,对光照变化和噪声敏感度相对较高。
• SIFT:对旋转、尺度缩放、亮度变化保持很好的不变性,对视角变化、仿射变换、噪声也有一定的稳定性。
特征描述
• ORB:采用二进制编码的描述子,如通过比较关键点周围的像素点对生成,占用空间小,匹配时可采用汉明距离等快速计算。
• SIFT:生成128维的特征描述子,包含了丰富的图像局部梯度等信息,特征区分性好,但维度高、计算复杂。
应用场景
• ORB:适用于实时性要求高的场景,如实时图像处理、SLAM等。
• SIFT:适用于对精度要求较高,对速度要求不苛刻的场景,如目标识别、图像拼接、三维重建等。
orb检测速度更快,但是空间旋转的控制识别相较于sift没那么好
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
// Mat image = imread("D:/images/butterfly.jpg");
Mat image = imread("C:/newword/image/25.mp4");
imshow("input", image);
auto orb = ORB::create(500);//创建了一个 ORB 特征检测器实例,指定最多检测500个关键点
vector<KeyPoint> kypts;
orb->detect(image, kypts);//使用 detect 函数在图像中检测关键点并存储在 kypts 中
Mat result;
drawKeypoints(image, kypts, result, Scalar::all(-1), DrawMatchesFlags::DEFAULT);//
drawKeypoints函数是OpenCV中用于在图像上绘制特征点的函数,下面对drawKeypoints(image, kypts, result, Scalar::all(-1), DrawMatchesFlags::DEFAULT);这行代码的参数进行详细解释:
• image:表示输入的源图像,是要在其上绘制关键点的图像,函数不会对该图像进行修改,仅用于获取图像数据和尺寸等信息。
• kypts:是vector<KeyPoint>类型的容器,包含了要绘制的关键点信息,每个KeyPoint对象包含了关键点的坐标、尺度、方向等属性。
• result:是输出图像,函数会将绘制了关键点的图像输出到这个Mat对象中,其尺寸和类型与输入图像image相同。
• Scalar::all(-1):用于指定绘制关键点的颜色。Scalar是OpenCV中用于表示颜色的结构体,Scalar::all(-1)表示使用默认的随机颜色来绘制每个关键点。
• DrawMatchesFlags::DEFAULT:是绘制的标志位,指定了绘制关键点的方式和细节,DrawMatchesFlags::DEFAULT表示使用默认的绘制方式,会绘制关键点的圆圈以及方向(如果有的话)。
Mat desc_orb;
orb->compute(image, kypts, desc_orb);
std::cout << desc_orb.rows << " x " << desc_orb.cols << std::endl;
1. orb->compute(image, kypts, desc_orb);:
• 这是在OpenCV中使用ORB(Oriented FAST and Rotated BRIEF)特征检测器的compute方法。
• orb是一个指向ORB对象的指针,compute方法的作用是根据给定的图像image和已经检测到的关键点kypts,计算这些关键点对应的描述符。
• 描述符是一种用于描述关键点特征的向量,它包含了关键点周围图像的局部信息,这些信息可以用于后续的特征匹配等操作。计算得到的描述符会存储在desc_orb这个Mat对象中。desc_orb的每一行代表一个关键点的描述符向量。
2. std::cout << desc_orb.rows << " x " << desc_orb.cols << std::endl;:
• 这行代码用于输出描述符矩阵desc_orb的尺寸信息。
• desc_orb.rows表示描述符矩阵的行数,即关键点的数量。
• desc_orb.cols表示描述符矩阵的列数,即每个关键点描述符向量的维度。
• 这行代码通过std::cout将描述符矩阵的行数和列数以"行数 x 列数"的形式输出到控制台,方便用户了解描述符的基本信息,例如输出可能是"100 x 32",表示检测到了100个关键点,每个关键点的描述符是32维的向量。
imshow("ORB关键点检测", result);
waitKey(0);
return 0;
}
SIFT检测
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, char** argv) {
// Mat image = imread("D:/images/butterfly.jpg");
Mat image = imread("C:/newword/image/28.jpg");
imshow("input", image);
auto sift = SIFT::create(500);
vector<KeyPoint> kypts;
sift->detect(image, kypts);
Mat result;
drawKeypoints(image, kypts, result, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
std::cout << kypts.size() << std::endl;
for (int i = 0; i < kypts.size(); i++) {
std::cout << "pt:" << kypts[i].pt << " angle:" << kypts[i].angle << "size: " << kypts[i].size << std::endl;
}
Mat desc_orb;
sift->compute(image, kypts, desc_orb);
std::cout << desc_orb.rows << " x " << desc_orb.cols << std::endl;
imshow("SIFT关键点检测", result);
waitKey(0);
return 0;
}
与上面的ORB思路差不多
相关文章:

落地 ORB角点检测与sift检测
ORB角点检测 可以说ORB是由FAST、灰度质心和BRIEF等技术组合优化形成的,不过更准确地说,ORB是在FAST特征检测算法基础上,结合了灰度质心确定方向以及改进后的BRIEF描述子等技术形成的,以下是具体分析: • FAST特征检…...

步入响应式编程篇(二)之Reactor API
步入响应式编程篇(二)之Reactor API 前言回顾响应式编程Reactor API的使用Stream引入依赖Reactor API的使用流源头的创建 reactor api的背压模式发布者与订阅者使用的线程查看弹珠图查看形成新流的日志 前言 对于响应式编程的基于概念,以及J…...

利用Redis实现数据缓存
目录 1 为啥要缓存捏? 2 基本流程(以查询商铺信息为例) 3 实现数据库与缓存双写一致 3.1 内存淘汰 3.2 超时剔除(半自动) 3.3 主动更新(手动) 3.3.1 双写方案 3.3.2 读写穿透方案 3.3.…...

如何使用 pytest-html 创建自定义 HTML 测试报告
关注开源优测不迷路 大数据测试过程、策略及挑战 测试框架原理,构建成功的基石 在自动化测试工作之前,你应该知道的10条建议 在自动化测试中,重要的不是工具 测试 Python 代码对于提高代码质量、检测漏洞或意外行为至关重要。 但测试结果又该…...

服务器中的流量主要是指什么?
服务器流量就是指服务器在单位时间内所传输的数据量,服务器流量在互联网中起着十分重要的作用,一般会被用来处理网站的访问请求,当用户在网站中浏览网页和视频时,服务器会接收到用户的请求,同时会返回网站的内容。 服务…...

飞牛NAS安装过程中的docker源问题
采用CloudFlare进行飞牛NAS的远程访问 【安全免费】无需公网IP、端口号,NAS外网访问新方法_网络存储_什么值得买 sudo mkdir -p /etc/docker sudo tee /etc/docker/daemon.json <<EOF {"registry-mirrors": ["https://docker.1panel.dev&quo…...

【动态规划】--- 斐波那契数模型
Welcome to 9ilks Code World (๑•́ ₃ •̀๑) 个人主页: 9ilk (๑•́ ₃ •̀๑) 文章专栏: 算法Journey 🏠 第N个泰波那契数模型 📌 题目解析 第N个泰波那契数 题目要求的是泰波那契数,并非斐波那契数。 &…...

php-phar打包避坑指南2025
有很多php脚本工具都是打包成phar形式,使用起来就很方便,那么如何自己做一个呢?也找了很多文档,也遇到很多坑,这里就来总结一下 phar安装 现在直接装yum php-cli包就有phar文件,很方便 可通过phar help查看…...

ChirpIoT技术的优势以及局限性
ChirpIoT是一种由上海磐启微电子开发的国产无线射频通讯技术,ChirpIoT技术基于磐启多年对雷达等线性扩频信号的深入研究,并在此基础上对线性扩频信号的变化进行了改进,实现了远距离传输的一种无线通信技术。相关产品型号有E29-400T22D、E290-…...

java提取系统应用的日志中的sql获取表之间的关系
为了获取到对应的sql数据,分了三步骤 第一步,获取日志文件,解析日志文件中的查询sql,递归解析sql,获取表关系集合 递归解析sql,获取表与表之间的关系 输出得到的对应关联关系数据 第二步,根据获…...

PyQt6医疗多模态大语言模型(MLLM)实用系统框架构建初探(下.代码部分)
医疗 MLLM 框架编程实现 本医疗 MLLM 框架结合 Python 与 PyQt6 构建,旨在实现多模态医疗数据融合分析并提供可视化界面。下面从数据预处理、模型构建与训练、可视化界面开发、模型 - 界面通信与部署这几个关键部分详细介绍编程实现。 6.1 数据预处理 在医疗 MLLM 框架中,多…...
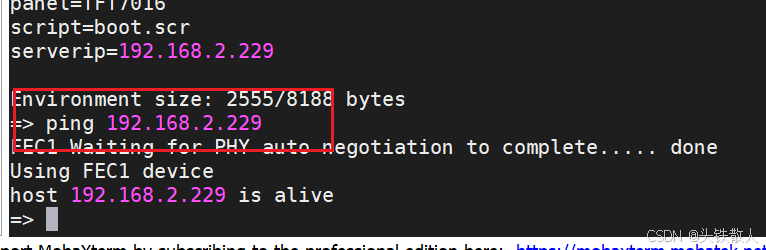
IMX6ull项目环境配置
文件解压缩: .tar.gz 格式解压为 tar -zxvf .tar.bz2 格式解压为 tar -jxvf 2.4版本后的U-boot.bin移植进SD卡后,通过串口启动配置开发板和虚拟机网络。 setenv ipaddr 192.168.2.230 setenv ethaddr 00:04:9f:…...
命令详解:wc)
Linux(Centos 7.6)命令详解:wc
1.命令作用 打印文件的行数、单词数、字节数,如果指定了多个文件,还会打印以上三种数据的总和(Print newline, word, and byte counts for each FILE, and a total line if more than one FILE is specified) 2.命令语法 Usage: wc [OPTION]... [FIL…...

Gradle buildSrc模块详解:集中管理构建逻辑的利器
文章目录 buildSrc模块二 buildSrc的使命三 如何使用buildSrc1. 创建目录结构2. 配置buildSrc的构建脚本3. 编写共享逻辑4. 在模块中引用 四 典型使用场景1. 统一依赖版本管理2. 自定义Gradle任务 3. 封装通用插件4. 扩展Gradle API 五 注意事项六 与复合构建(Compo…...
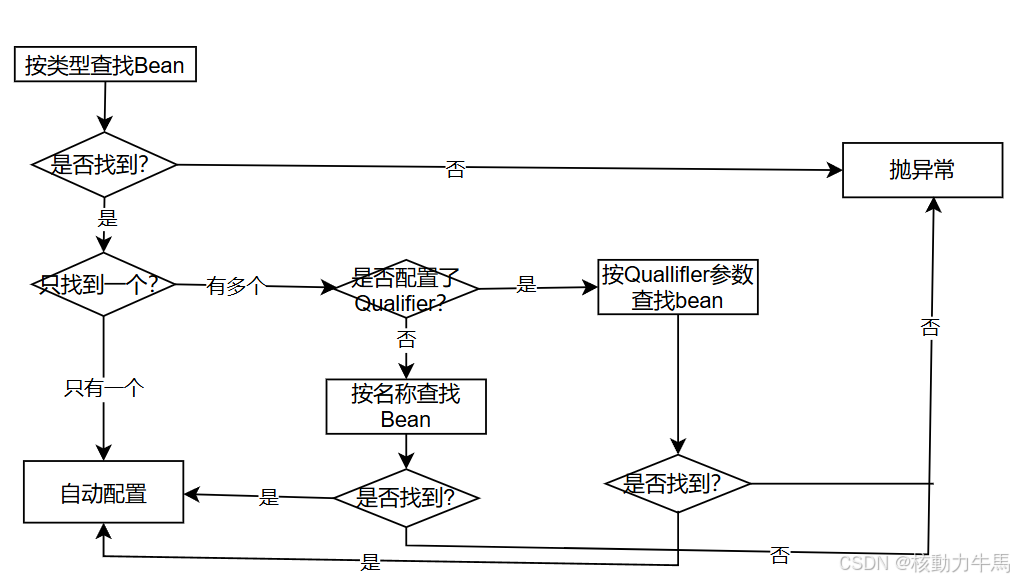
六、深入了解DI
依赖注入是⼀个过程,是指IoC容器在创建Bean时,去提供运⾏时所依赖的资源,⽽资源指的就是对象. 在上⾯程序案例中,我们使⽤了 Autowired 这个注解,完成了依赖注⼊的操作. 简单来说,就是把对象取出来放到某个类的属性中。 关于依赖注…...

基于RAG构建Text2SQL的实战教程
大家好,我是herosunly。985院校硕士毕业,现担任算法研究员一职,热衷于大模型算法的研究与应用。曾担任百度千帆大模型比赛、BPAA算法大赛评委,编写微软OpenAI考试认证指导手册。曾获得阿里云天池比赛第一名,CCF比赛第二名,科大讯飞比赛第三名。授权多项发明专利。对机器学…...

【论文阅读】HumanPlus: Humanoid Shadowing and Imitation from Humans
作者:Zipeng Fu、Qingqing Zhao、Qi Wu、Gordon Wetstein、Chelsea Finn 项目共同负责人,斯坦福大学 项目网址:https://humanoid-ai.github.io 摘要 制造外形与人类相似的机器人的一个关键理由是,我们可以利用大量的人类数据进行…...

第25篇 基于ARM A9处理器用C语言实现中断<一>
Q:怎样理解基于ARM A9处理器用C语言实现中断的过程呢? A:同样以一段使用C语言实现中断的主程序为例介绍,和汇编语言实现中断一样这段代码也使用了定时器中断和按键中断。执行该主程序会在DE1-SoC的红色LED上显示流水灯…...

Spring WebSocket 与 STOMP 协议结合实现私聊私信功能
目录 后端pom.xmlConfig配置类Controller类DTO 前端安装相关依赖websocketService.js接口javascripthtmlCSS 效果展示简单测试连接: 报错解决方法1、vue3 使用SockJS报错 ReferenceError: global is not defined 功能补充拓展1. 安全性和身份验证2. 异常处理3. 消息…...

RabbitMQ5-死信队列
目录 死信的概念 死信的来源 死信实战 死信之TTl 死信之最大长度 死信之消息被拒 死信的概念 死信,顾名思义就是无法被消费的消息,一般来说,producer 将消息投递到 broker 或直接到queue 里了,consumer 从 queue 取出消息进…...

[JavaScript] 面向对象编程
JavaScript 是一种多范式语言,既支持函数式编程,也支持面向对象编程。在 ES6 引入 class 语法后,面向对象编程在 JavaScript 中变得更加易于理解和使用。以下将详细讲解 JavaScript 中的类(class)、构造函数࿰…...

Windows上通过Git Bash激活Anaconda
在Windows上配置完Anaconda后,普遍通过Anaconda Prompt激活虚拟环境并执行Python,如下图所示: 有时需要连续执行多个python脚本时,直接在Anaconda Prompt下可以通过在以下方式,即命令间通过&&连接,…...

XSLT 编辑 XML:深度解析与实际应用
XSLT 编辑 XML:深度解析与实际应用 引言 XML(可扩展标记语言)和XSLT(可扩展样式表语言转换)是处理和转换XML数据的重要工具。本文将深入探讨XSLT在编辑XML文档中的应用,包括其基本概念、语法结构、以及实…...

主机监控软件WGCLOUD使用指南 - 如何设置主题背景色
WGCLOUD运维监控系统,从v3.5.7版本开始支持设置不同的主题背景色,如下 更多主题查看说明 如何设置主题背景色 - WGCLOUD...

C语言教程——文件处理(2)
目录 前言 一、顺序读写函数(续) 1.1fprintf 1.2fscanf 1.3fwrite 1.4fread 二、流和标准流 2.1流 2.2标准流 2.3示例 三、sscanf和sprintf 3.1sprintf 3.2sscanf 四、文件的随机读写 4.1fseek 4.2ftell 4.3rewind 五、文件读取结束的…...

ios打包:uuid与udid
ios的uuid与udid混乱的网上信息 新人开发ios,发现uuid和udid在网上有很多帖子里是混淆的,比如百度下,就会说: 在iOS中使用UUID(通用唯一识别码)作为永久签名,通常是指生成一个唯一标识…...

Spring Boot应用中实现基于JWT的登录拦截器,以保证未登录用户无法访问指定的页面
目录 一、配置拦截器进行登录校验 1. 在config层设置拦截器 2. 实现LoginInterceptor拦截器 3. 创建JWT工具类 4. 在登录时创建JWT并存入Cookie 二、配置JWT依赖和环境 1. 添加JWT依赖 2. 配置JWT环境 本篇博客将为大家介绍了如何在Spring Boot应用中实现基于JWT的登录…...
.NET9增强OpenAPI规范,不再内置swagger
ASP.NETCore in .NET 9.0 OpenAPI官方文档ASP.NET Core API 应用中的 OpenAPI 支持概述 | Microsoft Learnhttps://learn.microsoft.com/zh-cn/aspnet/core/fundamentals/openapi/overview?viewaspnetcore-9.0https://learn.microsoft.com/zh-cn/aspnet/core/fundamentals/ope…...

pytest自动化测试 - pytest夹具的基本概念
<< 返回目录 1 pytest自动化测试 - pytest夹具的基本概念 夹具可以为测试用例提供资源(测试数据)、执行预置条件、执行后置条件,夹具可以是函数、类或模块,使用pytest.fixture装饰器进行标记。 1.1 夹具的作用范围 夹具的作用范围: …...

hot100_234. 回文链表
给你一个单链表的头节点 head ,请你判断该链表是否为回文链表。如果是,返回 true ;否则,返回 false 。 示例 1: 输入:head [1,2,2,1] 输出:true 示例 2: 输入:head …...