编译可以在Android手机上运行的ffmpeg程序
下载代码
git clone git@github.com:FFmpeg/FFmpeg.git
git checkout n7.0
建立build目录
mkdir build
cd build
创建build.sh脚本
vim build.sh
这段脚本的主要功能是配置和编译 FFmpeg,使其能够在 Android 平台上运行,通过设置不同的架构和 API 级别,可以生成适用于不同 Android 设备的 FFmpeg 库。
#!/bin/bash# 设置 NDK 路径(需替换为实际路径)NDK=/home/hui/Android/Sdk/ndk/21.0.6113669/# 选择目标架构(armv7a/arm64/x86/x86_64)ARCH=arm64
API=21# 工具链路径
TOOLCHAIN=$NDK/toolchains/llvm/prebuilt/linux-x86_64# 输出目录
PREFIX=$(pwd)/android/$ARCH# 根据架构配置参数
case "$ARCH" inarmv7a)CPU=armv7-aTARGET_TRIPLE=armv7a-linux-androideabi;;arm64)CPU=armv8-aTARGET_TRIPLE=aarch64-linux-android;;x86)CPU=i686TARGET_TRIPLE=i686-linux-android;;x86_64)CPU=x86_64TARGET_TRIPLE=x86_64-linux-android;;
esac# 编译器路径
CC=$TOOLCHAIN/bin/$TARGET_TRIPLE$API-clang
CXX=$TOOLCHAIN/bin/$TARGET_TRIPLE$API-clang++
STRIP=$TOOLCHAIN/bin/aarch64-linux-android-strip# FFmpeg 配置参数
../configure \--prefix=$PREFIX \--disable-shared \--enable-static \--enable-gpl \--enable-cross-compile \--enable-jni \--enable-ffmpeg \--disable-doc \--target-os=android \--arch=$ARCH \--cpu=$CPU \--cc=$CC \--cxx=$CXX \--strip=$STRIP \--sysroot=$TOOLCHAIN/sysroot \--extra-cflags="-march=$CPU -O3 -fPIC" \--extra-ldflags="-Wl,-rpath-link=$TOOLCHAIN/sysroot/usr/lib"make clean
make -j16
make install
关键步骤说明
设置路径:包括 NDK 路径、工具链路径和输出目录。
配置参数:根据目标架构设置相应的编译参数。
调用 FFmpeg 配置脚本:传递所有必要的参数以配置 FFmpeg 编译环境。
编译和安装:清理之前的编译结果,进行编译并安装生成的库文件。
FFmpeg 配置脚本
../configure \--prefix=$PREFIX \--disable-shared \--enable-static \--enable-gpl \--enable-cross-compile \--enable-jni \--enable-ffmpeg \--disable-doc \--target-os=android \--arch=$ARCH \--cpu=$CPU \--cc=$CC \--cxx=$CXX \--strip=$STRIP \--sysroot=$TOOLCHAIN/sysroot \--extra-cflags="-march=$CPU -O3 -fPIC" \--extra-ldflags="-Wl,-rpath-link=$TOOLCHAIN/sysroot/usr/lib"
参数解释:
--prefix=$PREFIX:指定安装目录。
--disable-shared:禁用共享库生成。
--enable-static:启用静态库生成。
--enable-gpl:启用 GPL 许可证的功能。
--enable-cross-compile:启用交叉编译。
--enable-jni:启用 JNI 支持。
--enable-ffmpeg:启用 FFmpeg 应用程序。
--disable-doc:禁用文档生成。
--target-os=android:指定目标操作系统为 Android。
--arch=$ARCH:指定目标架构。
--cpu=$CPU:指定目标 CPU 架构。
--cc=$CC 和 --cxx=$CXX:指定 C 和 C++ 编译器路径。
--strip=$STRIP:指定用于剥离调试符号的工具路径。
--sysroot=$TOOLCHAIN/sysroot:指定系统根目录。
--extra-cflags="-march=$CPU -O3 -fPIC":指定额外的编译标志。
--extra-ldflags="-Wl,-rpath-link=$TOOLCHAIN/sysroot/usr/lib":指定额外的链接标志。
--disable-shared & --enable-static好处是把ffmpeg编译成一个独立的可执行文件,放到手机里面的时候只需要把ffmpeg程序push进去即可。
在手机上运行
adb push ffmpeg /data/localadb shell
$ chmod +x /data/local/ffmpeg
$ /data/local/ffmpeg -i /sdcard/
执行ffmpeg命令:
phone:/sdcard $ /data/local/ffmpeg -i input.mp4 Input #0, mov,mp4,m4a,3gp,3g2,mj2, from 'input.mp4':Metadata:major_brand : mp42minor_version : 0compatible_brands: isommp42creation_time : 2025-03-03T07:01:49.000000Zcom.android.version: 14Duration: 00:02:31.20, start: 0.000000, bitrate: 21470 kb/sStream #0:0[0x1](eng): Video: h264 (Main) (avc1 / 0x31637661), yuv420p(tv, bt709, progressive), 2160x3840, 21371 kb/s, 60 fps, 60 tbr, 90k tbn (default)Metadata:creation_time : 2025-03-03T07:01:49.000000Zhandler_name : VideoHandlevendor_id : [0][0][0][0]Stream #0:1[0x2](eng): Audio: aac (LC) (mp4a / 0x6134706D), 44100 Hz, stereo, fltp, 96 kb/s (default)Metadata:creation_time : 2025-03-03T07:01:49.000000Zhandler_name : SoundHandlevendor_id : [0][0][0][0]
相关文章:

编译可以在Android手机上运行的ffmpeg程序
下载代码 git clone gitgithub.com:FFmpeg/FFmpeg.git git checkout n7.0建立build目录 mkdir build cd build创建build.sh脚本 vim build.sh这段脚本的主要功能是配置和编译 FFmpeg,使其能够在 Android 平台上运行,通过设置不同的架构和 API 级别&am…...

华为hcia——Datacom实验指南——配置手工模式以太网链路聚合
什么是以太网链路聚合(Eth-trunk) 是一种将多个物理链路捆绑在一起,让设备以为是一条大链路,能够增加带宽,增加冗余度,提升可靠性,实现负载平衡。 传输方式有两种 基于数据流传输和基于数据包…...

【C语言6】数组和函数实践:扫雷游戏的简单实现
文章目录 一、扫雷游戏分析和设计1.1 扫雷游戏的功能说明1.2 游戏的分析和设计1.2.1 数据结构的分析1.2.2 文件结构设计 二、扫雷游戏的代码实现三、扫雷游戏的扩展总结 一、扫雷游戏分析和设计 1.1 扫雷游戏的功能说明 使用控制台实现经典的扫雷游戏游戏可以通过菜单实现继续…...

LeetCode 热题 100----1.两数之和
LeetCode 热题 100----1.两数之和 题目描述 我的解法 语言:js 思路就是:用双重循环去找哪两个数字相加等于target,目前的时间复杂度为O(n2),之后右优化思路再更新。...

《模式和状态管理》知识总结三-EcuM与BswM模块的交互
前言 这篇文章主要搞清楚在模式管理中,BswM和EcuM各自的分工。距离学完模式管理也有几天时间了,写这篇文章算是复习一下。 EcuM及BswM交互总览 EcuM负责Ecu的上下电状态的处理,当Ecu处于正常运行状态的时候,EcuM会将Ecu的控制权…...
RTL8111网卡)
RK3568平台(网络篇)RTL8111网卡
RTL8111 是 Realtek 推出的一款高性能千兆以太网控制器芯片,广泛应用于 PCIE 网卡中。 其工作原理涉及 数据链路层 和 物理层 的协同工作,以下是其核心原理的详细说明: 一.网卡的基本功能 1.数据封装与解封装: 网卡负责将计算机中的数据封装成网络传输的帧(Frame),并…...

客户需求模糊或频繁变更怎么办
应对客户需求模糊或频繁变更的关键在于 明确沟通、敏捷应对、科学决策。其中,明确沟通尤为重要,因为通过有效沟通,不仅能迅速厘清客户真实需求,还能及时发现隐藏问题,降低项目风险,为后续调整提供有力数据支…...

动静态库-Linux 学习
在软件开发中,程序库是一组预先编写好的程序代码,它们存储了常用的函数、变量和数据结构等。这些库可以帮助开发者节省大量的时间和精力,避免重复编写相同的代码。当我们在 Linux 系统中开发程序时,经常会用到两种类型的程序库&am…...

DeepSeek 系列模型:论文精读《A Survey of DeepSeek Models》
引言:一篇快速了解 DeepSeek 系列的论文。我在翻译时加入了一些可以提高 “可读性” 的连词 ✅ NLP 研 2 选手的学习笔记 笔者简介:Wang Linyong,NPU,2023级,计算机技术 研究方向:文本生成、大语言模型 论文…...

Python解决“找出整形数组中占比超过一半的数”问题
这里写目录标题 问题描述测试样例解决思路代码法1法2 问题描述 小R从班级中抽取了一些同学,每位同学都会给出一个数字。已知在这些数字中,某个数字的出现次数超过了数字总数的一半。现在需要你帮助小R找到这个数字。 测试样例 样例1: 输入&…...

机器人学习模拟框架 robosuite (3) 机器人控制代码示例
Robosuite框架是一个用于机器人模拟和控制的强大工具,支持多种类型的机器人。 官方文档:Overview — robosuite 1.5 documentation 开源地址:https://github.com/ARISE-Initiative/robosuite 目录 1、通过键盘或SpaceMouse远程控制机器人…...

kakfa-3:ISR机制、HWLEO、生产者、消费者、核心参数负载均衡
1. kafka内核原理 1.1 ISR机制 光是依靠多副本机制能保证Kafka的高可用性,但是能保证数据不丢失吗?不行,因为如果leader宕机,但是leader的数据还没同步到follower上去,此时即使选举了follower作为新的leaderÿ…...

【微知】如何查看Mellanox网卡上的光模块的信息?(ethtool -m enp1s0f0 看型号、厂商、生产日期等)
背景 服务器上插入的光模块经常被忽略,往往这里是定位问题最根本的地方。如何通过命令查看? 命令 ethtool提供了-m参数,m是module-info的意思,他是从光模块的eeprom中读取数据。(应该是用i2c协议读取的)…...

yum源选要配置华为云的源,阿里云用不了的情况
curl -O /etc/yum.repos.d/CentOS-Base.repo https://repo.huaweicloud.com/repository/conf/CentOS-7-reg.repo...

nginx accesslog 打印自定义header
比如我在请求的header中添加了一个path-match-type,那我现在nginx的accesslog 中打印出来,应该如何配置呢? rootnginx-59f5d66df6-jw5k8:/# cat /etc/nginx/nginx.conf user nginx; worker_processes auto;error_log /var/log/nginx/erro…...

好数——前缀和思想(题目分享)
今天我的舍友去参加“传智杯”广东省的省赛,跟我说了这样一道题,他说他想不出来怎么去优化代码,怎么做都是套用两层for循环超时,下面我就根据题意,使用前缀和的算法去优化一下思路,题目本身是不难的&#x…...

MWC 2025 | 移远通信大模型解决方案加速落地,引领服务机器人创新变革
随着人工智能、大模型等技术的蓬勃发展,生成式AI应用全面爆发。在此背景下,服务机器人作为大模型技术在端侧落地的关键场景,迎来了前所未有的发展机遇。 作为与用户直接交互的智能设备,服务机器人需要应对复杂场景下的感知、决策和…...

【大模型基础_毛玉仁】0.概述
更多内容:XiaoJ的知识星球 【大模型基础_毛玉仁】 系列文章参考 系列文章 【大模型基础_毛玉仁】0.概述 【大模型基础_毛玉仁】1.1 基于统计方法的语言模型 更新中。。。。。。 参考 书籍:大模型基础_完整版.pdf Github:https://github.co…...

ADB、Appium 和 大模型融合开展移动端自动化测试
将 ADB、Appium 和 大模型(如 GPT、LLM) 结合,可以显著提升移动端自动化测试的智能化水平和效率。以下是具体的实现思路和应用场景: 1. 核心组件的作用 ADB(Android Debug Bridge): 用于与 Android 设备通信,执行设备操作(如安装应用、获取日志、截图等)。Appium: 用…...

springboot425-基于SpringBoot的BUG管理系统(源码+数据库+纯前后端分离+部署讲解等)
💕💕作者: 爱笑学姐 💕💕个人简介:十年Java,Python美女程序员一枚,精通计算机专业前后端各类框架。 💕💕各类成品Java毕设 。javaweb,ssm…...

Ubuntu系统上部署Node.js项目的完整流程
以下是在Ubuntu系统上部署Node.js项目的完整流程,分为系统初始化、环境配置、项目部署三个部分: 一、系统初始化 & 环境准备 bash # 1. 更新系统软件包 sudo apt update && sudo apt upgrade -y# 2. 安装基础工具 sudo apt install -y buil…...

X Window---图形接口
摘抄自 鸟哥的linux私房菜 基础篇 第四版 有鉴于图形用户接口(Graphical User Interface, GUI) 的需求日益加重,在 1984 年由 MIT 与其他第三方首次发表了 X Window System ,并且更在 1988 年成立了非营利性质的 XFree86 这个组织。所谓的XFree86 其实是…...
)
数据序列化协议 Protobuf 3 介绍(Go 语言)
Protobuf 3 入门 1. 什么是序列化? 1.1 概念 序列化(Serialization 或 Marshalling) 是指将数据结构或对象的状态转换成可存储或传输的格式。反向操作称为反序列化(Deserialization 或 Unmarshalling),它…...

FineReport 操作注意
1.父单元格重复的时候,如何取消合并 效果如下: 只需要在单元格中,将数据设置为【列表】即可。 2.待定...

3D手眼标定转换详细实施步骤及原理概述
3D手眼标定转换详细实施步骤及原理概述 一、手眼标定的核心目标二、3D手眼标定的原理概述一、基本概念与坐标系定义**二、数学建模与方程推导****1. 坐标变换的齐次矩阵表示****2. 手眼标定方程推导** **三、方程求解方法****1. 分离旋转与平移****2. 旋转矩阵求解****3. 平移向…...

Verilog:SCCB控制器
目录 一、SCCB协议 (1)SCCB时序 (2)与I2C的区别 二、Verilog 实现 (1)设计要求 (2)设计要点 (3)模块完整代码 三、功能验证 (1)写…...

维度建模基础篇:从理论到核心组件解析
维度建模基础篇:从理论到核心组件解析 引言 在数据仓库与商业智能(BI)领域,维度建模(Dimensional Modeling)作为一种经典的数据组织方法论,自Kimball提出以来,已成为构建高效分析型系统的核心范式1,2,3。其以业务需求为导向,通过事实表与维度表的组合,实现对复杂…...
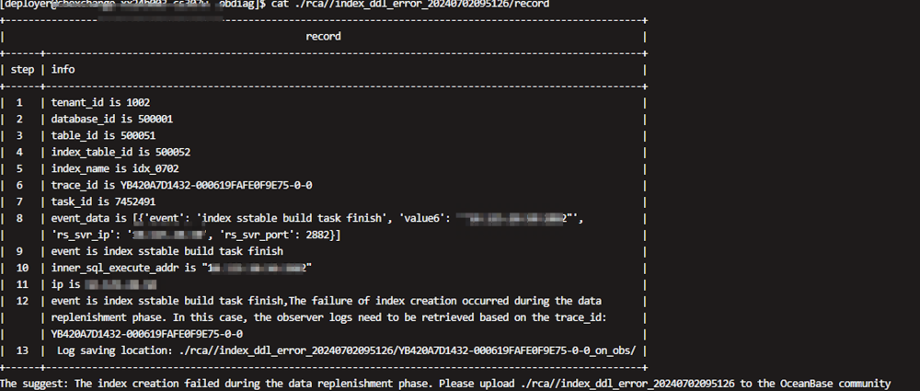
与中国联通技术共建:通过obdiag分析OceanBase DDL中的报错场景
中国联通软件研究院(简称联通软研院)在全面评估与广泛调研后,在 2021年底决定采用OceanBase 作为基础,自研分布式数据库产品CUDB(即China Unicom Database,中国联通数据库)。目前,该…...

大数据与网络安全讲座
🍅 点击文末小卡片 ,免费获取网络安全全套资料,资料在手,涨薪更快 大数据的价值为大家公认。业界通常以4个“V”来概括大数据的基本特征——Volume(数据体量巨大)、Variety(数据类型繁多)、Value(价值密度低)、Velocity(处理速度快…...

AtCoder Beginner Contest 395 E
点我写题 题意:给个有向图,从1出发,每次可以走一条有向边,花费为1,也可以选择把全部有向边翻转,花费x,问到n的最小花费 思路:最短路dp,定义dis[i][0/1]表示走到i为止&…...