C++ Windows下屏幕截图
屏幕截图核心代码(如果要求高帧率,请使用DxGI):
// RGB到YUV的转换公式
#define RGB_TO_Y(r, g, b) ((int)((0.299 * (r)) + (0.587 * (g)) + (0.114 * (b))))
#define RGB_TO_U(r, g, b) ((int)((-0.169 * (r)) - (0.331 * (g)) + (0.500 * (b)) + 128))
#define RGB_TO_V(r, g, b) ((int)((0.500 * (r)) - (0.419 * (g)) - (0.081 * (b)) + 128))// 假设输入图像是32位ARGB,宽度为width,高度为height,如果是图像是RGB,下面像素位数4改为3即可
void ConvertRGBToYUV420P(unsigned char* rgbData, int width, int height, unsigned char* yuvData)
{int ySize = width * height;int uvSize = width * height / 4;// 填充Y分量for (int i = 0; i < height; ++i){for (int j = 0; j < width; ++j){int index = i * width + j;yuvData[index] = RGB_TO_Y(rgbData[index * 4], rgbData[index * 4 + 1], rgbData[index * 4 + 2]);}}// 填充U和V分量(下采样)int uvIndex = ySize;for (int i = 0; i < height; i += 2){for (int j = 0; j < width; j += 2){int rgbIndex = i * width + j;yuvData[uvIndex++] = RGB_TO_U(rgbData[rgbIndex * 4], rgbData[rgbIndex * 4 + 1], rgbData[rgbIndex * 4 + 2]);}}for (int i = 0; i < height; i += 2){for (int j = 0; j < width; j += 2){int rgbIndex = i * width + j;yuvData[uvIndex++] = RGB_TO_V(rgbData[rgbIndex * 4], rgbData[rgbIndex * 4 + 1], rgbData[rgbIndex * 4 + 2]);}}
}void SaveYUV420P(const char* filename, unsigned char* yuvBuffer, int width, int height)
{FILE* file = fopen(filename, "wb");if (!file){AfxMessageBox(_T("Failed to open file for writing!"));return;}int frameSize = width * height * 3 / 2;fwrite(yuvBuffer, 1, frameSize, file);fclose(file);
}void SaveHBitmapToBmpFile(HBITMAP hBitmap, CString path)
{// 定义文件头结构BITMAPFILEHEADER fileHead;int fileHeadLen = sizeof(BITMAPFILEHEADER);// 定义图象信息结构BITMAPINFOHEADER bmpHead;int bmpHeadLen = sizeof(BITMAPINFOHEADER);// 获取HBITMAP对象信息BITMAP bmpObj;GetObject(hBitmap, sizeof(BITMAP), &bmpObj);// 计算文件总的字节大小DWORD fileSizeInByte;CDC srcDC;srcDC.CreateDC(L"DISPLAY", NULL, NULL, NULL);DWORD PixelSizeInBit = srcDC.GetDeviceCaps(BITSPIXEL) * srcDC.GetDeviceCaps(PLANES);fileSizeInByte = fileHeadLen + bmpHeadLen + bmpObj.bmWidth * bmpObj.bmHeight * PixelSizeInBit / 8;// 初始化文件头结构fileHead.bfOffBits = fileHeadLen + bmpHeadLen;fileHead.bfReserved1 = 0;fileHead.bfReserved2 = 0;fileHead.bfSize = fileSizeInByte;fileHead.bfType = 0x4D42; // 'BM'// 初始图像信息结构bmpHead.biBitCount = PixelSizeInBit;bmpHead.biClrImportant = 0;bmpHead.biClrUsed = 0;bmpHead.biCompression = BI_RGB;bmpHead.biHeight = -bmpObj.bmHeight;//图像数据颠倒处理bmpHead.biPlanes = 1;bmpHead.biSize = bmpHeadLen;bmpHead.biSizeImage = bmpObj.bmWidth * bmpObj.bmHeight * PixelSizeInBit / 8;bmpHead.biWidth = bmpObj.bmWidth;bmpHead.biXPelsPerMeter = 0;bmpHead.biYPelsPerMeter = 0;// 创建并打开BMP文件CFile file;if (!file.Open(path, CFile::modeCreate | CFile::modeWrite)){// 处理文件打开失败的情况return;}// 写入文件头和图象信息头file.Write(&fileHead, fileHeadLen);file.Write(&bmpHead, bmpHeadLen);// 获取位图数据并写入文件BYTE* pBitmapBits = NULL;BITMAPINFO bmpInfo;ZeroMemory(&bmpInfo, sizeof(BITMAPINFO));bmpInfo.bmiHeader = bmpHead;HDC hDC = GetDC(NULL);HBITMAP hOldBitmap = (HBITMAP)SelectObject(hDC, hBitmap);pBitmapBits = new unsigned char[bmpHead.biSizeImage];int nBits = GetDIBits(hDC, hBitmap, 0, bmpObj.bmHeight, pBitmapBits, &bmpInfo, DIB_RGB_COLORS);file.Write(pBitmapBits, bmpHead.biSizeImage);// 转换RGB到YUV420Punsigned char* yuvBuffer = new unsigned char[bmpObj.bmWidth * bmpObj.bmHeight * 3 / 2];ConvertRGBToYUV420P(pBitmapBits, bmpObj.bmWidth, bmpObj.bmHeight, yuvBuffer);SaveYUV420P("d:\\a.yuv", yuvBuffer, bmpObj.bmWidth, bmpObj.bmHeight);delete[] yuvBuffer;// 恢复原来的位图对象并释放资源SelectObject(hDC, hOldBitmap);ReleaseDC(NULL, hDC);delete[] pBitmapBits;// 关闭文件file.Close();
}// 获取屏幕截图
HBITMAP CaptureScreen()
{HDC hScreen = GetDC(NULL);HDC hDC = CreateCompatibleDC(hScreen);int width = GetSystemMetrics(SM_CXSCREEN);int height = GetSystemMetrics(SM_CYSCREEN);HBITMAP hBitmap = CreateCompatibleBitmap(hScreen, width, height);SelectObject(hDC, hBitmap);BitBlt(hDC, 0, 0, width, height, hScreen, 0, 0, SRCCOPY);DeleteDC(hDC);ReleaseDC(NULL, hScreen);return hBitmap;
}void CaptureAndSaveScreenAsYUV420P(const char* filename)
{HBITMAP hBitmap = CaptureScreen();SaveHBitmapToBmpFile(hBitmap, _T("d:\\a.bmp"));DeleteObject(hBitmap);
}CaptureAndSaveScreenAsYUV420P("d:\\a.yuv");
该代码包含了抓取屏幕数据获取到HBITMAP对象,并根据HBITMAP对象获取到RGB数据,RGB数据可以保存bmp文件,也可以转换YUV420P后进行图像编码,具体如何使用,各取所需吧。
相关文章:

C++ Windows下屏幕截图
屏幕截图核心代码(如果要求高帧率,请使用DxGI): // RGB到YUV的转换公式 #define RGB_TO_Y(r, g, b) ((int)((0.299 * (r)) (0.587 * (g)) (0.114 * (b)))) #define RGB_TO_U(r, g, b) ((int)((-0.169 * (r)) - (0.331 * (g)) …...

月结保障:回滚慢、行锁频发
问题背景 3.1号月结现场保障,到场了先让kill了一个账务的会话,回滚了20min,巡检的时候发现报表库有几条行锁:enq: TX - row lock contention,sql:delete from table_name 语句已经失败,正在回滚…...

Golang的微服务服务发现机制
## 1. Golang微服务服务发现机制 微服务架构已经成为当今软件开发的主流趋势,它能将复杂的单体应用拆分成小而独立的服务单元,实现更快的开发、部署和扩展。在微服务架构中,服务发现是非常重要的一环,它能够实现服务之间的自动发现…...

Keepalived 入门详解:高可用集群部署最佳实践!
1. 什么是 Keepalived? 在分布式集群中,单点故障(SPOF) 是影响系统稳定性的重要问题。Keepalived 作为一款高可用服务软件,可以有效防止集群单点故障,保障系统的高可用性。 Keepalived 最初是为 LVS&#…...

SparkStreaming之04:调优
SparkStreaming调优 一 、要点 4.1 SparkStreaming运行原理 深入理解 4.2 调优策略 4.2.1 调整BlockReceiver的数量 案例演示: object MultiReceiverNetworkWordCount {def main(args: Array[String]) {val sparkConf new SparkConf().setAppName("Networ…...

开发博客系统
前言 准备工作 数据库表分为实体表和关系表 第一,建数据库表 然后导入前端页面 创建公共模块 就是统一返回值,异常那些东西 自己造一个自定义异常 普通类 mapper 获取全部博客 我们只需要返回id,title,content,us…...

微信小程序上如何使用图形验证码
1、php服务器生成图片验证码的代码片段如下: 注意红框部分的代码,生成的是ArrayBuffer类型的二进制图片 2、显示验证码 显示验证码,不要直接image组件加上src显示,那样拿不到cookie,没有办法做图形验证码的验证&…...

IntelliJ IDEA 构建项目时内存溢出问题
问题现象 在使用 IntelliJ IDEA 构建 Java 项目时,遇到了以下错误: java: java.lang.OutOfMemoryError: Java heap space java.lang.RuntimeException: java.lang.OutOfMemoryError: Java heap space这是一个典型的 Java 堆内存不足错误,表…...
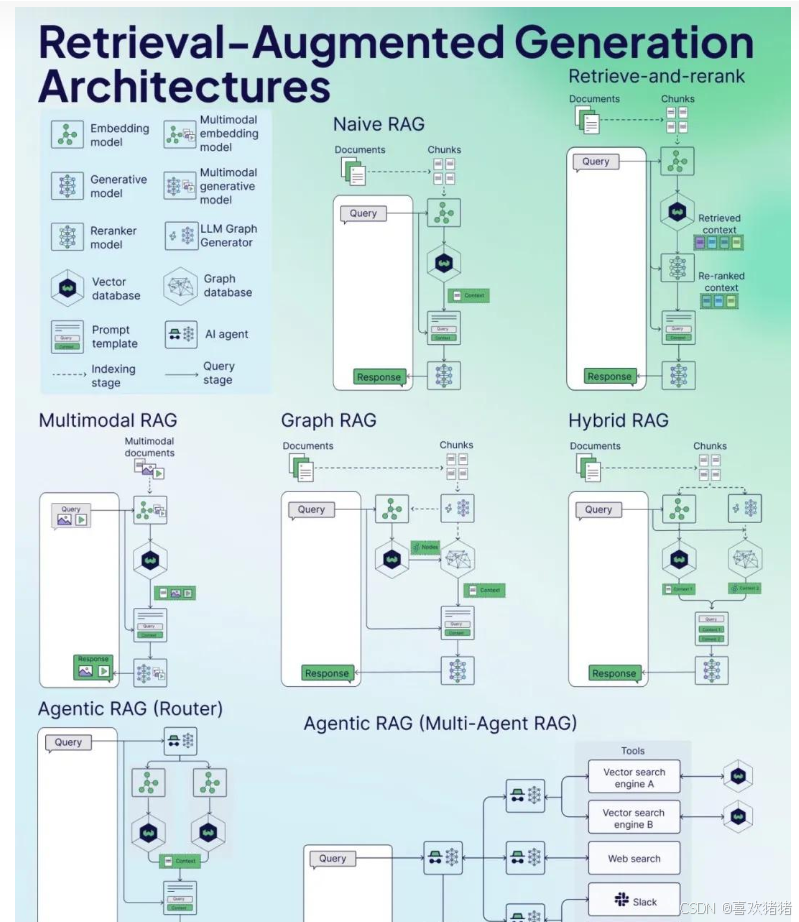
大模型微调与RAG检索增强技术深度解析
一、引言 随着人工智能技术的飞速发展,大模型(如BERT、GPT等)在自然语言处理、计算机视觉等领域取得了显著成效。然而,这些预训练好的大模型往往难以直接应用于特定业务场景,因此,大模型微调(F…...

[liorf_localization_imuPreintegration-2] process has died
使用liorf,编译没报错,但是roslaunch报错如下: 解决方法: step1: 如果你之前没有安装 GTSAM,可以尝试安装它 step2: 检查是否缺少依赖库 ldd /home/zz/1210/devel/lib/liorf_localization/liorf_localization_imuPr…...

2024 年 MySQL 8.0.40 安装配置、Workbench汉化教程最简易(保姆级)
首先到官网上下载安装包:http://www.mysql.com 点击下载,拉到最下面,点击社区版下载 windows用户点击下面适用于windows的安装程序 点击下载,网络条件好可以点第一个,怕下着下着断了点第二个离线下载 双击下载好的安装…...

数列极限入门习题
数列极限入门习题 lim n → ∞ ( 1 1 2 1 3 ⋯ 1 n ) 1 n \lim\limits_{n\rightarrow\infty}(1 \frac{1}{2}\frac{1}{3}\cdots\frac{1}{n})^{\frac{1}{n}} n→∞lim(12131⋯n1)n1 lim n → ∞ ( 1 n 1 1 n 2 ⋯ 1 n n ) \lim\limits_{n\rightarrow\…...

【Python/Pytorch】-- 创建3090Ti显卡所需环境
文章目录 文章目录 01 服务器上,存在三个anaconda,如何选择合适的,创建python环境?02 conda、anaconda、cuda、cudnn区别03 用到一些指令04 如何指定cuda的版本?05 conda跟pip的区别?06 pycharm控制台07 服…...
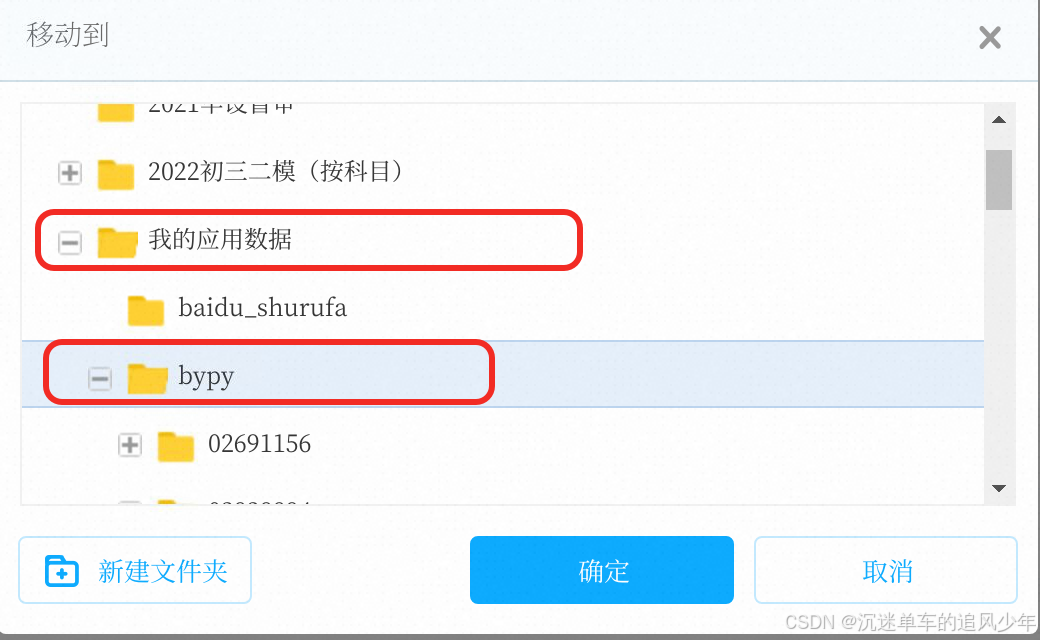
如何在无图形化界面的服务器上下载百度网盘的超大文件(10GB以上)?
目录 登录百度网盘账号 进入特定的文件夹 下载 完整教程 登录百度网盘账号 第一次登录的时候会展示: Please visit: https://openapi.baidu.com/oauth/2.0/authorize?client_idxxx And authorize this app Paste the Authorization Code here within 10 minut…...

AI应用测试:遇到类ChatGPT的流式接口要如何压测?
先说结论: 使用最普遍的JMeter 就能支持类 OpenAI 的流式接口(如 ChatGPT 的流式聊天接口)的测试 总体设置 JMeter 支持测试 OpenAI 的流式接口,但需要额外配置(如启用 KeepAlive 和调整超时)。如果需要实时处理流式响应,使用 Regular Expression Extractor 或自定义脚…...

Linux磁盘情况查询
一、查询系统整体磁盘使用情况 1、基本语法 df -h 2、示例 二、查询指定目录的磁盘占用情况 1、基本语法 du -h 查询指定目录的磁盘占用情况,默认为当前目录 2、常用选项 选项 说明 -h 以人类可读的格式显示磁盘使用情况(例如,KB、…...

数据库原理3
1.在SQL中,外模式对应于试图(VIEW)和部分基本表;模式对应于基本表;内模式对应于存储文件。 2.FETCH:实施游标推进 3.数据操纵:insert,update,delete 数据控制:grant,revoke 数据定义:create,drop,alter 4.物理结构…...

【3D格式转换SDK】HOOPS Exchange技术概览(二):3D数据处理高级功能
在当今数字化工程领域,HOOPS Exchange作为一款强大的SDK,为3D工程应用程序的开发提供了关键支持。本文将深入剖析其基本组件、特定功能以及数据结构,带您全面了解这一驱动3D数据处理的核心工具。 一、概述 HOOPS Exchange专注于访问和重…...

利用Adobe Acrobat 实现PPT中图片分辨率的提升
1. 下载适用于 Windows 的 64 位 Acrobat 注册方式参考:https://ca.whu.edu.cn/knowledge.html?type1 2. 将ppt中需要提高分辨率的图片复制粘贴到新建的pptx问价中,然后执行“文件—>导出---->创建PDF、XPS文档” 3. 我们会发现保存下来的distrib…...

Python frozenset介绍
在 Python 中,frozenset 是一种不可变(immutable)的集合类型,它是 set 的不可变版本。与普通的 set 类型不同,frozenset 的内容一旦创建就不能被修改,这使得它在某些场景下非常有用。 1. 特点 不可变性&am…...

docer swarm集群部署springboot项目
1.准备两台服务器,安装好docker、docker-compose 因为用到了docker仓库,安装harbor,可以从github下载离线安装包 2. 我这边用到了gitlab-ci,整体流程也都差不多 1)打包mvn clean install 2)打镜像 docker-compose -f docker-compo…...

Elasticsearch:解锁深度匹配,运用Elasticsearch DSL构建闪电般的高效模糊搜索体验
目录 Elasticsearch查询分类 叶子查询 全文检索查询 match查询 multi_match查询 精确查询 term查询 range查询 复杂查询 bool查询简单应用 bool查询实现排序和分页 bool查询实现高亮 场景分析 问题思考 解决方案 search_after方案(推荐) point in time方案 方案…...

解决局域网访问Dify却仅显示nginx页面的问题
为什么dify在本机可以正常访问,局域网通过ip访问却只看到欢迎使用nginx的提示,如果访问服务器ip/apps则直接提示404 Not Found。这是怎么回事该如何解决呢?文章中将一步步解决这些问题。 前言 之前在服务器部署了dify,也在服务器…...

deepseek思考,谁是下一个deepseek?
这两天连续看了两篇某B站up关于AI的分析,也是感触很多 讲得内容咱先不说,讲得是真好。怎么说呢,就“活该人家能赚到钱”就对了。 第一篇,他说了一个事儿,就是AI未来的趋势,1000天内,代替世界上…...

从小米汽车召回看智驾“命门”:智能化时代 — 时间就是安全
2025年1月,小米因车辆“授时同步异常”召回3万余辆小米SU7,成为其造车历程中的首个重大安全事件。 从小米SU7召回事件剖析,授时同步何以成为智能驾驶的命门? 2024年11月,多名车主反馈SU7标准版的智能泊车辅助功能出现…...

OpenAI 最后一代非推理模型:OpenAI 发布 GPT-4.5预览版
最后一代非推理大模型 在人工智能领域,OpenAI 一直以其创新的技术和卓越的产品引领着行业的发展。近期,OpenAI 正式发布了 GPT-4.5 研究预览版。不仅如此,官方还宣称 GPT-4.5 被定位为 “最后一代非推理模型”,这一消息再次引起了…...
)
React Native国际化实践(react-i18next)
React Native国际化实践 一、主流国际化方案选择 react-i18next react-native-localize react-i18next:功能强大的国际化框架,支持复数、插值、嵌套等复杂语法,且与React无缝集成。react-native-localize:用于获取设备语言和地区…...

ioday2----->标准io函数
思维导图: 练习: 1将当前的时间写入到time. txt的文件中,如果ctrlc退出之后,在再次执行支持断点续写 1.2022-04-26 19:10:20 2.2022-04-26 19:10:21 3.2022-04-26 19:10:22 //按下ctrlc停止,再次执行程序 4.2022…...

竞争只属于失败者
“竞争只属于失败者”这一观点源自知名投资人、PayPal联合创始人彼得蒂尔(Peter Thiel)。他在斯坦福大学的创业课程中提出,成功的企业应追求垄断地位,而非陷入激烈的市场竞争。蒂尔认为,垄断使企业能够专注于长期发展和…...

【代码分享】基于IRM和RRT*的无人机路径规划方法详解与Matlab实现
基于IRM和RRT*的无人机路径规划方法详解与Matlab实现 1. IRM与RRT*的概述及优势 IRM(Influence Region Map)通过建模障碍物的影响区域,量化环境中的安全风险,为RRT算法提供启发式引导。RRT(Rapidly-exploring Random…...