学习日记-250305
一般经验值:
k_hop = 1~2(默认值 1)适用于大多数知识追踪任务。k_hop > 3可能会导致模型难以优化,但适用于知识点间关系复杂的情况。
k_hop 需要权衡: - 太小(1)→ 只能学习局部信息,捕捉不到远程知识关系。
- 太大(>3)→ 可能导致信息过度传播,使所有知识点变得相似,影响模型效果。
1. 部分代码拆解(一)
learn_kernel_para = F.softplus(lk_tilde) * self.args.alpha # [NK, KH]
-
lk_tilde:- 之前通过
k_hop传播,整合了知识点的关联、前置、后续信息。 - 它的形状
[NK, KH],表示NK个知识点在KH维隐藏空间的表示。
- 之前通过
-
F.softplus(lk_tilde):Softplus(x) = log(1 + e^x)- 这是平滑版的 ReLU,确保
learn_kernel_para非负。 - 作用:
- 当 x→−∞x \to -\inftyx→−∞,Softplus 逼近 0(防止负数影响计算)。
- 当 x→+∞x \to +\inftyx→+∞,Softplus 逼近 xxx(近似线性增长)。
-
self.args.alpha:alpha是超参数,控制学习核参数的影响范围。- 调节学习速率,防止
learn_kernel_para过大或过小,影响梯度更新。
2. learn_kernel_para 的作用
learn_kernel_para 作为学习能力参数,决定:
- 学生在不同知识点上的学习速率(较大值表示容易学会,较小值表示难以掌握)。
- 如何在时间维度上影响知识状态的更新,即影响后续
h(知识状态)的变化。
在 forward() 过程中,它用于调整:
learn_exp = (-(learn_count[:, :, None].float() + 1) * delta_time * learn_kernel_para).exp()
learn_kernel_para越大,学习速率越快,知识状态更新更快。learn_kernel_para越小,学习速率越慢,知识掌握变化较小。
3. 为什么要用 Softplus?
- 保证非负性
learn_kernel_para不能是负数,否则会影响学习状态更新计算。Softplus(x)始终是正数,防止lk_tilde可能的负值影响学习计算。
- 平滑版 ReLU,防止梯度消失
- 由于
softplus(x) ≈ x在大值时近似线性,在小值时不会变成 0,因此可以避免梯度消失问题。
- 由于
4. 直观理解
如果你是一个学生:
learn_kernel_para表示你的学习能力:learn_kernel_para大 → 你对该知识点的学习速度快(容易掌握)。learn_kernel_para小 → 你对该知识点的学习速度慢(难以掌握)。
softplus(lk_tilde) 确保:
- 学习能力
learn_kernel_para始终为正数,避免错误学习率。 - 通过
alpha控制学习速率,防止学习能力过大或过小。
5. 结论
✅ 计算学习核参数,决定知识点的学习速度。
✅ Softplus 确保非负,避免负学习率问题。
✅ 乘以 alpha 进行缩放,防止数值过大或过小。
✅ 影响后续知识状态 h 的更新,使得知识点的掌握程度符合学习规律。
/home/edurs/anaconda3/bin/conda run -n ma12 --no-capture-output python /home/edurs/GRKT_new/Training.py
Training start...
Evaluation before training: AUC: 0.5757, ACC: 0.6029,
train_loss: 0.6036, AUC: 0.7184, ACC: 0.6976, * 0.7079
train_loss: 0.5705, AUC: 0.7471, ACC: 0.7121, * 0.7294
train_loss: 0.5488, AUC: 0.7656, ACC: 0.7259, * 0.7455
train_loss: 0.5316, AUC: 0.7744, ACC: 0.7319, * 0.7529
train_loss: 0.5191, AUC: 0.7818, ACC: 0.7379, * 0.7595
train_loss: 0.5105, AUC: 0.7843, ACC: 0.7396, * 0.7616
train_loss: 0.5022, AUC: 0.7843, ACC: 0.7396, * 0.7616
train_loss: 0.4948, AUC: 0.7858, ACC: 0.7401, * 0.7626
train_loss: 0.4881, AUC: 0.7855, ACC: 0.7381,
train_loss: 0.4831, AUC: 0.7849, ACC: 0.7402,
train_loss: 0.4775, AUC: 0.7837, ACC: 0.7390,
train_loss: 0.4729, AUC: 0.7841, ACC: 0.7373,
train_loss: 0.4661, AUC: 0.7826, ACC: 0.7386,
train_loss: 0.4608, AUC: 0.7807, ACC: 0.7379,
train_loss: 0.4557, AUC: 0.7794, ACC: 0.7354,
train_loss: 0.4520, AUC: 0.7774, ACC: 0.7359,
train_loss: 0.4476, AUC: 0.7764, ACC: 0.7324,
train_loss: 0.4460, AUC: 0.7749, ACC: 0.7349,
train_loss: 0.4399, AUC: 0.7706, ACC: 0.7327,
train_loss: 0.4387, AUC: 0.7706, ACC: 0.7302,
train_loss: 0.4358, AUC: 0.7681, ACC: 0.7286,
train_loss: 0.4308, AUC: 0.7690, ACC: 0.7300,
train_loss: 0.4282, AUC: 0.7669, ACC: 0.7259,
train_loss: 0.4251, AUC: 0.7659, ACC: 0.7285,
train_loss: 0.4241, AUC: 0.7656, ACC: 0.7261,
train_loss: 0.4236, AUC: 0.7634, ACC: 0.7231,
train_loss: 0.4208, AUC: 0.7635, ACC: 0.7261,
train_loss: 0.4226, AUC: 0.7642, ACC: 0.7273,
Training stopped.
valid: AUC: 0.7858, ACC: 0.7401,
test: AUC: 0.7881, ACC: 0.7376,
Evaluation before training: AUC: 0.5366, ACC: 0.5602,
train_loss: 0.6052, AUC: 0.7198, ACC: 0.6977, * 0.7087
train_loss: 0.5703, AUC: 0.7487, ACC: 0.7145, * 0.7314
train_loss: 0.5475, AUC: 0.7666, ACC: 0.7266, * 0.7463
train_loss: 0.5308, AUC: 0.7754, ACC: 0.7328, * 0.7538
train_loss: 0.5185, AUC: 0.7804, ACC: 0.7347, * 0.7572
train_loss: 0.5090, AUC: 0.7832, ACC: 0.7374, * 0.7599
train_loss: 0.5016, AUC: 0.7833, ACC: 0.7372,
train_loss: 0.4947, AUC: 0.7855, ACC: 0.7408, * 0.7628
train_loss: 0.4885, AUC: 0.7844, ACC: 0.7375,
train_loss: 0.4822, AUC: 0.7842, ACC: 0.7397,
train_loss: 0.4761, AUC: 0.7830, ACC: 0.7383,
train_loss: 0.4693, AUC: 0.7820, ACC: 0.7365,
train_loss: 0.4657, AUC: 0.7815, ACC: 0.7354,
train_loss: 0.4616, AUC: 0.7800, ACC: 0.7357,
train_loss: 0.4558, AUC: 0.7780, ACC: 0.7346,
train_loss: 0.4526, AUC: 0.7779, ACC: 0.7337,
train_loss: 0.4470, AUC: 0.7760, ACC: 0.7338,
train_loss: 0.4444, AUC: 0.7722, ACC: 0.7310,
train_loss: 0.4405, AUC: 0.7709, ACC: 0.7313,
train_loss: 0.4380, AUC: 0.7722, ACC: 0.7290,
train_loss: 0.4349, AUC: 0.7713, ACC: 0.7283,
train_loss: 0.4299, AUC: 0.7679, ACC: 0.7293,
train_loss: 0.4296, AUC: 0.7678, ACC: 0.7266,
train_loss: 0.4280, AUC: 0.7672, ACC: 0.7281,
train_loss: 0.4243, AUC: 0.7671, ACC: 0.7291,
train_loss: 0.4211, AUC: 0.7678, ACC: 0.7275,
train_loss: 0.4169, AUC: 0.7625, ACC: 0.7234,
train_loss: 0.4130, AUC: 0.7620, ACC: 0.7232,
Training stopped.
valid: AUC: 0.7855, ACC: 0.7408,
test: AUC: 0.7833, ACC: 0.7349,
Evaluation before training: AUC: 0.5521, ACC: 0.5002,
train_loss: 0.6095, AUC: 0.7193, ACC: 0.7016, * 0.7104
train_loss: 0.5721, AUC: 0.7458, ACC: 0.7158, * 0.7307
train_loss: 0.5501, AUC: 0.7644, ACC: 0.7284, * 0.7462
train_loss: 0.5339, AUC: 0.7746, ACC: 0.7325, * 0.7533
train_loss: 0.5218, AUC: 0.7804, ACC: 0.7388, * 0.7593
train_loss: 0.5121, AUC: 0.7826, ACC: 0.7404, * 0.7612
train_loss: 0.5046, AUC: 0.7839, ACC: 0.7417, * 0.7625
train_loss: 0.4974, AUC: 0.7840, ACC: 0.7407,
train_loss: 0.4908, AUC: 0.7857, ACC: 0.7433, * 0.7642
train_loss: 0.4847, AUC: 0.7846, ACC: 0.7412,
train_loss: 0.4796, AUC: 0.7831, ACC: 0.7383,
train_loss: 0.4739, AUC: 0.7832, ACC: 0.7390,
train_loss: 0.4689, AUC: 0.7799, ACC: 0.7381,
train_loss: 0.4647, AUC: 0.7810, ACC: 0.7382,
train_loss: 0.4595, AUC: 0.7800, ACC: 0.7358,
train_loss: 0.4555, AUC: 0.7751, ACC: 0.7348,
train_loss: 0.4504, AUC: 0.7745, ACC: 0.7323,
train_loss: 0.4462, AUC: 0.7725, ACC: 0.7313,
train_loss: 0.4417, AUC: 0.7738, ACC: 0.7307,
train_loss: 0.4392, AUC: 0.7714, ACC: 0.7304,
train_loss: 0.4345, AUC: 0.7686, ACC: 0.7302,
train_loss: 0.4325, AUC: 0.7668, ACC: 0.7277,
train_loss: 0.4290, AUC: 0.7670, ACC: 0.7250,
train_loss: 0.4246, AUC: 0.7689, ACC: 0.7300,
train_loss: 0.4245, AUC: 0.7686, ACC: 0.7294,
train_loss: 0.4236, AUC: 0.7614, ACC: 0.7202,
train_loss: 0.4191, AUC: 0.7616, ACC: 0.7248,
train_loss: 0.4169, AUC: 0.7586, ACC: 0.7238,
train_loss: 0.4185, AUC: 0.7566, ACC: 0.7239,
Training stopped.
valid: AUC: 0.7857, ACC: 0.7433,
test: AUC: 0.7898, ACC: 0.7377,
Evaluation before training: AUC: 0.5531, ACC: 0.4871,
train_loss: 0.6087, AUC: 0.7160, ACC: 0.6958, * 0.7058
train_loss: 0.5707, AUC: 0.7437, ACC: 0.7116, * 0.7275
train_loss: 0.5492, AUC: 0.7626, ACC: 0.7252, * 0.7436
train_loss: 0.5327, AUC: 0.7743, ACC: 0.7335, * 0.7536
train_loss: 0.5202, AUC: 0.7794, ACC: 0.7379, * 0.7584
train_loss: 0.5098, AUC: 0.7832, ACC: 0.7376, * 0.7601
train_loss: 0.5018, AUC: 0.7849, ACC: 0.7421, * 0.7632
train_loss: 0.4944, AUC: 0.7850, ACC: 0.7387,
train_loss: 0.4873, AUC: 0.7852, ACC: 0.7406,
train_loss: 0.4814, AUC: 0.7839, ACC: 0.7390,
train_loss: 0.4760, AUC: 0.7811, ACC: 0.7369,
train_loss: 0.4698, AUC: 0.7809, ACC: 0.7356,
train_loss: 0.4633, AUC: 0.7786, ACC: 0.7362,
train_loss: 0.4585, AUC: 0.7761, ACC: 0.7322,
train_loss: 0.4527, AUC: 0.7716, ACC: 0.7324,
train_loss: 0.4491, AUC: 0.7728, ACC: 0.7310,
train_loss: 0.4448, AUC: 0.7711, ACC: 0.7314,
train_loss: 0.4418, AUC: 0.7675, ACC: 0.7279,
train_loss: 0.4386, AUC: 0.7657, ACC: 0.7287,
train_loss: 0.4351, AUC: 0.7661, ACC: 0.7277,
train_loss: 0.4299, AUC: 0.7676, ACC: 0.7285,
train_loss: 0.4267, AUC: 0.7639, ACC: 0.7256,
train_loss: 0.4275, AUC: 0.7627, ACC: 0.7255,
train_loss: 0.4257, AUC: 0.7621, ACC: 0.7242,
train_loss: 0.4228, AUC: 0.7605, ACC: 0.7230,
train_loss: 0.4185, AUC: 0.7584, ACC: 0.7213,
train_loss: 0.4204, AUC: 0.7558, ACC: 0.7217,
Training stopped.
valid: AUC: 0.7849, ACC: 0.7421,
test: AUC: 0.7846, ACC: 0.7337,
Evaluation before training: AUC: 0.5620, ACC: 0.5893,
train_loss: 0.6024, AUC: 0.7216, ACC: 0.6950, * 0.7081
train_loss: 0.5709, AUC: 0.7468, ACC: 0.7105, * 0.7284
train_loss: 0.5480, AUC: 0.7672, ACC: 0.7211, * 0.7438
train_loss: 0.5309, AUC: 0.7777, ACC: 0.7293, * 0.7531
train_loss: 0.5190, AUC: 0.7827, ACC: 0.7327, * 0.7573
train_loss: 0.5088, AUC: 0.7850, ACC: 0.7351, * 0.7597
train_loss: 0.5013, AUC: 0.7860, ACC: 0.7350, * 0.7600
train_loss: 0.4950, AUC: 0.7885, ACC: 0.7351, * 0.7614
train_loss: 0.4875, AUC: 0.7873, ACC: 0.7363,
train_loss: 0.4816, AUC: 0.7864, ACC: 0.7344,
train_loss: 0.4755, AUC: 0.7879, ACC: 0.7366, * 0.7618
train_loss: 0.4702, AUC: 0.7847, ACC: 0.7331,
train_loss: 0.4658, AUC: 0.7847, ACC: 0.7327,
train_loss: 0.4599, AUC: 0.7841, ACC: 0.7325,
train_loss: 0.4559, AUC: 0.7840, ACC: 0.7328,
train_loss: 0.4513, AUC: 0.7830, ACC: 0.7312,
train_loss: 0.4479, AUC: 0.7793, ACC: 0.7301,
train_loss: 0.4456, AUC: 0.7804, ACC: 0.7310,
train_loss: 0.4404, AUC: 0.7781, ACC: 0.7285,
train_loss: 0.4398, AUC: 0.7785, ACC: 0.7280,
train_loss: 0.4377, AUC: 0.7758, ACC: 0.7285,
train_loss: 0.4323, AUC: 0.7776, ACC: 0.7260,
train_loss: 0.4294, AUC: 0.7728, ACC: 0.7283,
train_loss: 0.4264, AUC: 0.7763, ACC: 0.7278,
train_loss: 0.4243, AUC: 0.7720, ACC: 0.7260,
train_loss: 0.4242, AUC: 0.7744, ACC: 0.7267,
train_loss: 0.4271, AUC: 0.7748, ACC: 0.7263,
train_loss: 0.4237, AUC: 0.7718, ACC: 0.7247,
train_loss: 0.4210, AUC: 0.7713, ACC: 0.7267,
train_loss: 0.4149, AUC: 0.7706, ACC: 0.7250,
train_loss: 0.4127, AUC: 0.7695, ACC: 0.7239,
Training stopped.
valid: AUC: 0.7879, ACC: 0.7366,
test: AUC: 0.7851, ACC: 0.7369,
Test result of all the experiments.
AUC:
0.7881
0.7833
0.7898
0.7846
0.7851
ACC:
0.7376
0.7349
0.7377
0.7337
0.7369Average results:
valid: AUC: 0.7860, ACC: 0.7406,
test: AUC: 0.7862, ACC: 0.7362, Process finished with exit code 0
相关文章:

学习日记-250305
阅读论文:Leveraging Pedagogical Theories to Understand Student Learning Process with Graph-based Reasonable Knowledge Tracing ps:代码逻辑最后一点还没理顺,明天继续 4.2 Knowledge Memory & Knowledge Tracing 代码研究: 一般…...

【Maven】入门介绍 与 安装、配置
文章目录 一、Maven简介1. Maven介绍2. Maven软件工作原理模型图 二、Maven安装和配置1. Maven安装2. Maven环境配置3. Maven功能配置4. IDEA配置本地Maven软件 一、Maven简介 1. Maven介绍 https://maven.apache.org/what-is-maven.html Maven 是一款为 Java 项目管理构建、…...

springbootWeb入门--创建springbootweb项目
步骤: 1.建立空工程 2.选择项目的jdk版本 3.在工程中建立模块,选择“spring initilazer”,类型勾选“maven” 4.勾选“spring web”之后,就无需再自行写dependcy了。 5.等待联网下载 6.生成的工程文件,如下绿色框中文件&…...
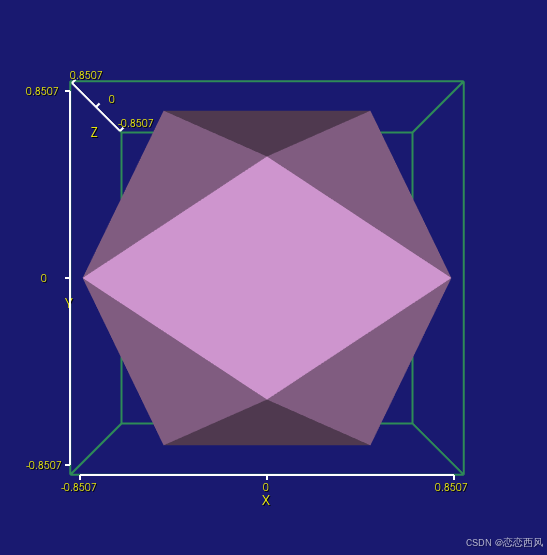
vtk 3D坐标标尺应用 3D 刻度尺
2d刻度尺 : vtk 2D 刻度尺 2D 比例尺-CSDN博客 简介: 3D 刻度尺,也是常用功能,功能强大 3D 刻度尺 CubeAxesActor vtkCubeAxes调整坐标轴的刻度、原点和显示效果,包括关闭小标尺、固定坐标轴原点,以及设置FlyMode模…...
)
爬虫(持续更新ing)
爬虫(持续更新ing) # 网络请求 # url统一资源定位符(如:https://www.baidu.com) # 请求过程:客户端的web浏览器向服务器发起请求 # 请求又分为四部分:请求网址,请求方法(…...
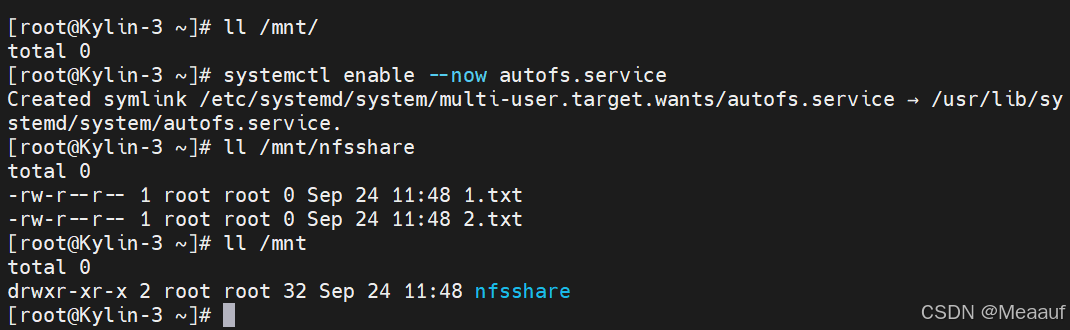
Kylin麒麟操作系统服务部署 | NFS服务部署
以下所使用的环境为: 虚拟化软件:VMware Workstation 17 Pro 麒麟系统版本:Kylin-Server-V10-SP3-2403-Release-20240426-x86_64 一、 NFS服务概述 NFS(Network File System),即网络文件系统。是一种使用于…...

如何配置虚拟机IP?
以下是在虚拟机中配置IP地址的一般步骤,以常见的Linux虚拟机为例: 查看当前网络配置 使用命令 ifconfig 或 ip addr show 查看当前虚拟机的网络接口及相关配置信息,确定要配置IP的网络接口名称,如 eth0 或 ens33 等。 编辑网…...

十一、Spring Boot:使用JWT实现用户认证深度解析
Spring Boot JWT(JSON Web Token):无状态认证 在现代 Web 开发中,无状态认证是一种重要的安全机制,它允许服务器在不存储会话信息的情况下验证用户身份。JSON Web Token(JWT)是一种常用的无状态…...

涨薪技术|持续集成Git使用详解
Git介绍 Git 是一个开源的分布式版本控制系统,用以有效、高速的处理从很小到非常大的项目版本管理。 Git 的特点: 分支更快、更容易。 支持离线工作;本地提交可以稍后提交到服务器上。 Git 提交都是原子的,且是整个项目范围的,…...

批量对 Word 优化与压缩,减少 Word 文件大小
在编辑 Word 文档的时候,我们通常会插入一些图片或者一些样式,这可能会导致 Word 文档的体积变得非常的庞大,不利于我们对 Word 文档进行分享、传输或者存档等操作,因此我们通常会碰到需要优化或者压缩 Word 文档的需求。那如何才…...

CSS定位详解上
1. 相对定位 1.1 如何设置相对定位? 给元素设置 position:relative 即可实现相对定位。 可以使用 left 、 right 、 top 、 bottom 四个属性调整位置。 1.2 相对定位的参考点在哪里? 相对自己原来的位置 1.3 相对定位的特点࿱…...

DeepSeek、Grok 和 ChatGPT 对比分析:从技术与应用场景的角度深入探讨
文章目录 一、DeepSeek:知识图谱与高效信息检索1. 核心技术2. 主要特点3. 应用场景4. 实际案例 二、Grok:通用人工智能框架1. 核心技术2. 主要特点3. 应用场景4. 实际案例 三、ChatGPT:聊天机器人与通用对话系统1. 核心技术2. 主要特点3. 应用…...

Unix Domain Socket和eventfd
在Linux开发中,Unix Domain Socket和eventfd是两种不同的通信机制,它们的设计目标和适用场景有显著差异。以下分点解释并配合示例说明: 一、Unix Domain Socket(UDS) 1. 是什么? 一种**本地进程间通信&am…...

【万字长文】基于大模型的数据合成(增强)及标注
写在前面 由于合成数据目前是一个热门的研究方向,越来越多的研究者开始通过大模型合成数据来丰富训练集,为了能够从一个系统的角度去理解这个方向和目前的研究方法便写了这篇播客,希望能对这个领域感兴趣的同学有帮助! 欢迎点赞&…...

2025年能源工作指导意见
2025年是“十四五”规划收官之年,做好全年能源工作意义重大。为深入贯彻落实党中央、国务院决策部署,以能源高质量发展和高水平安全助力我国经济持续回升向好,满足人民群众日益增长的美好生活用能需求,制定本意见。 一、总体要求…...

【Elasticsearch】Elasticsearch 中使用 HDFS 存储快照
在 Elasticsearch 中使用 HDFS 存储快照的步骤如下: 1.安装 HDFS 插件 要使用 HDFS 存储 Elasticsearch 的索引快照,需要在 Elasticsearch 集群的所有节点上安装 HDFS 插件。 • 在线安装:适用于网络环境良好的场景,执行以下命…...
:分组与联表查询的深度探索(下))
Oracle 数据库基础入门(四):分组与联表查询的深度探索(下)
在 Oracle 数据库的操作中,联合查询与子查询是获取复杂数据的关键手段。当单表数据无法满足业务需求时,联合查询允许我们从多张表中提取关联信息,而子查询则能以嵌套的方式实现更灵活的数据筛选。对于 Java 全栈开发者而言,掌握这…...

深搜专题6:迷宫问题
描述 设有一个N*N方格的迷宫,入口和出口分别在左上角和右上角。 迷宫格子中分别放有0和1,0表示可通,1表示不能,迷宫走的规则如下: 即从某点开始,有八个方向可走,前进方格中数字为0时表示可通过…...

【每日学点HarmonyOS Next知识】web滚动、事件回调、selectable属性、监听H5内部router、Grid嵌套时高度设置
【每日学点HarmonyOS Next知识】web滚动、事件回调、selectable属性、监听H5内部router、Grid嵌套时高度设置 1、HarmonyOS WebView加载url无法滚动? scroll 里面嵌套webView,demo参考: // xxx.ets import web_webview from ohos.web.webv…...

MacBook上API调⽤⼯具推荐
在当今的软件开发中,API调用工具已经成为了开发者不可或缺的助手。无论是前端、后端还是全栈开发,API的调试、测试和管理都是日常工作中的重要环节。想象一下,如果没有这些工具,开发者可能需要手动编写复杂的CURL命令,…...

如何构建一个 Docker 镜像?
1. 创建 Dockerfile 文件 (1)选择工作目录 首先,创建一个项目目录,并进入该目录: mkdir my-docker-project cd my-docker-project(2)创建 Dockerfile 使用任何文本编辑器(如 nano、…...
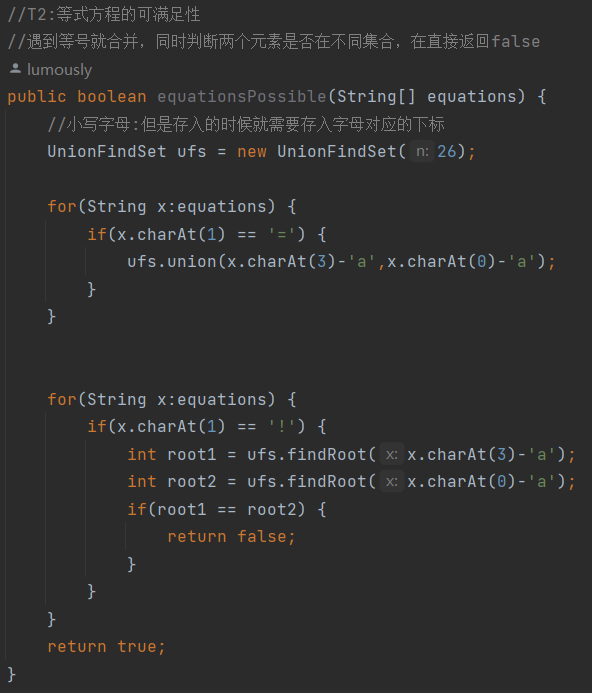
【数据结构】LRUCache|并查集
目录 一、LRUCache 1.概念 2.实现:哈希表双向链表 3.JDK中类似LRUCahe的数据结构LinkedHashMap 🔥4.OJ练习 二、并查集 1. 并查集原理 2.并查集代码实现 3.并查集OJ 一、LRUCache 1.概念 最近最少使用的,一直Cache替换算法 LRU是Least Recent…...

go数组的声明和初始化
1.数组简介 数组是可以存放多个同一类型的数据。数组也是一种数据类型,在go中,数组是值类型。数组的长度也是数组类型的一部分,所以[2]int和[3]int属于不同的数据类型。 2.数组的长度也是类型的一部分 var arr1 [2]intvar arr2 [3]intfmt.P…...

基于STM32的智能家居中控系统
基于STM32的智能家居中控系统 下载源文件 链接:博客 第1章 绪论 1.1 研究背景与意义(扩增至1500字) • 市场数据支撑:引用IDC报告数据显示,中国智能家居设备市场年增长率达25%(2022年市场规模超6500亿元) …...

初识Qt · 信号与槽 · 基础知识
目录 前言: 信号和槽初识 两个问题 前言: 本文我们正式开始介绍信号与槽这个概念,在谈及Qt中的信号与槽这个概念之前,我们不妨回顾一下Linux中的信号,比如发生了除0错误,OS就会给该进程发送一个信号&am…...

Java高频面试之集合-03
hello啊,各位观众姥爷们!!!本baby今天来报道了!哈哈哈哈哈嗝🐶 面试官:说说ArrayList和LinkedList的区别 ArrayList 与 LinkedList 的详细对比 一、底层数据结构 特性ArrayListLinkedList存…...

常用的分布式ID设计方案
常用的分布式ID设计方案 在分布式系统中,生成全局唯一的ID是一个常见的需求。无论是数据库表中的主键,还是消息队列的消息ID,都需要一个高效且可靠的唯一标识符。本文将探讨几种常用的分布式ID设计方案,并分析它们的优缺点。 1. …...

宇树科技再落一子!天羿科技落地深圳,加速机器人创世纪
2025年3月5日,机器人行业龙头宇树科技(Unitree)在深圳再添新动作——全资子公司深圳天羿科技有限公司正式成立。这家注册资本10万元、法定代表人周昌慧的新公司,聚焦智能机器人研发与销售,标志着宇树科技在华南市场的战…...

【长安大学】苹果手机/平板自动连接认证CHD-WIFI脚本(快捷指令)
背景: 已经用这个脚本的记得设置Wifi时候,关闭“自动登录” 前几天实在忍受不了CHD-WIFI动不动就断开,一天要重新连接,点登陆好几次。试了下在网上搜有没有CHD-WIFI的自动连接WIFI自动认证脚本,那样我就可以解放双手&…...

基于遗传算法的无人机三维路径规划仿真步骤详解
基于遗传算法的无人机三维路径规划仿真步骤详解 一、问题定义 目标:在三维空间内,寻找从起点到终点的最优路径,需满足: 避障:避开所有障碍物。路径最短:总飞行距离尽可能短。平滑性:转折角度不宜过大,降低机动能耗。输入: 三维地图(含障碍物,如立方体、圆柱体)。起…...