ROS2 Rviz 实战:给 panda 机械臂场景塞个圆柱体
视频讲解

ROS2 Rviz 实战:给 panda 机械臂场景塞个圆柱体
创建add_cylinder的package
ros2 pkg create add_cylinder --build-type ament_cmake --dependencies rclcpp control_msgs moveit_ros_planning_interface
在src中添加add_cylinder.cpp,如下
#include <rclcpp/rclcpp.hpp>
#include <moveit/move_group_interface/move_group_interface.h>
#include <moveit/planning_scene_interface/planning_scene_interface.h>#include <tf2/LinearMath/Quaternion.h>
#include <tf2_geometry_msgs/tf2_geometry_msgs.h>#include <cmath>// 定义一个将度数转换为弧度的函数
double degreesToRadians(double degrees) {return degrees * M_PI / 180.0;
}int main(int argc, char** argv)
{rclcpp::init(argc, argv);auto node = rclcpp::Node::make_shared("add_cylinder");// 创建MoveGroupInterface对象,指定规划组名称moveit::planning_interface::MoveGroupInterface move_group(node, "panda_arm");// 创建PlanningSceneInterface对象moveit::planning_interface::PlanningSceneInterface planning_scene_interface;// 添加圆柱体到规划场景moveit_msgs::msg::CollisionObject collision_object;collision_object.header.frame_id = move_group.getPlanningFrame();collision_object.id = "cylinder";shape_msgs::msg::SolidPrimitive primitive;primitive.type = primitive.CYLINDER;primitive.dimensions.resize(2);primitive.dimensions[0] = 0.05; // 高度primitive.dimensions[1] = 0.01; // 半径geometry_msgs::msg::Pose cylinder_pose;cylinder_pose.orientation.w = 1.0;cylinder_pose.position.x = 0.5;cylinder_pose.position.y = 0.0;cylinder_pose.position.z = 0.0;collision_object.primitives.push_back(primitive);collision_object.primitive_poses.push_back(cylinder_pose);collision_object.operation = collision_object.ADD;std::vector<moveit_msgs::msg::CollisionObject> collision_objects;collision_objects.push_back(collision_object);planning_scene_interface.applyCollisionObjects(collision_objects);rclcpp::shutdown();return 0;
}CMakeLists.txt文件如下
cmake_minimum_required(VERSION 3.8)
project(add_cylinder)if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")add_compile_options(-Wall -Wextra -Wpedantic)
endif()# 查找依赖项
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(moveit_ros_planning_interface REQUIRED)# 添加可执行文件
add_executable(add_cylinder src/add_cylinder.cpp)
ament_target_dependencies(add_cylinder rclcpp moveit_ros_planning_interface)# 安装可执行文件
install(TARGETSadd_cylinderDESTINATION lib/${PROJECT_NAME}
)ament_package()编译
cd ~/ws_moveit
colcon build --packages-select add_cylinder先启动Rviz2的panda机械臂场景
ros2 launch moveit2_tutorials demo.launch.py rviz_config:=panda_moveit_config_demo_empty.rviz
在其一个终端,输入如下指令
source install/setup.bash
ros2 run add_cylinder add_cylinder
相关文章:
ROS2 Rviz 实战:给 panda 机械臂场景塞个圆柱体
视频讲解 ROS2 Rviz 实战:给 panda 机械臂场景塞个圆柱体 创建add_cylinder的package ros2 pkg create add_cylinder --build-type ament_cmake --dependencies rclcpp control_msgs moveit_ros_planning_interface 在src中添加add_cylinder.cpp,如下 #…...
DeepSeek+知识库+鸿蒙,助力鸿蒙高效开发
不知道你们发现没有,就是鸿蒙开发官网,文档也太多太多了,对于新手来说确实头疼,开发者大多是极客,程序的目的是让世界更高效!看文档,挺头疼的,毕竟都是理科生。 遇到问题不要慌&…...
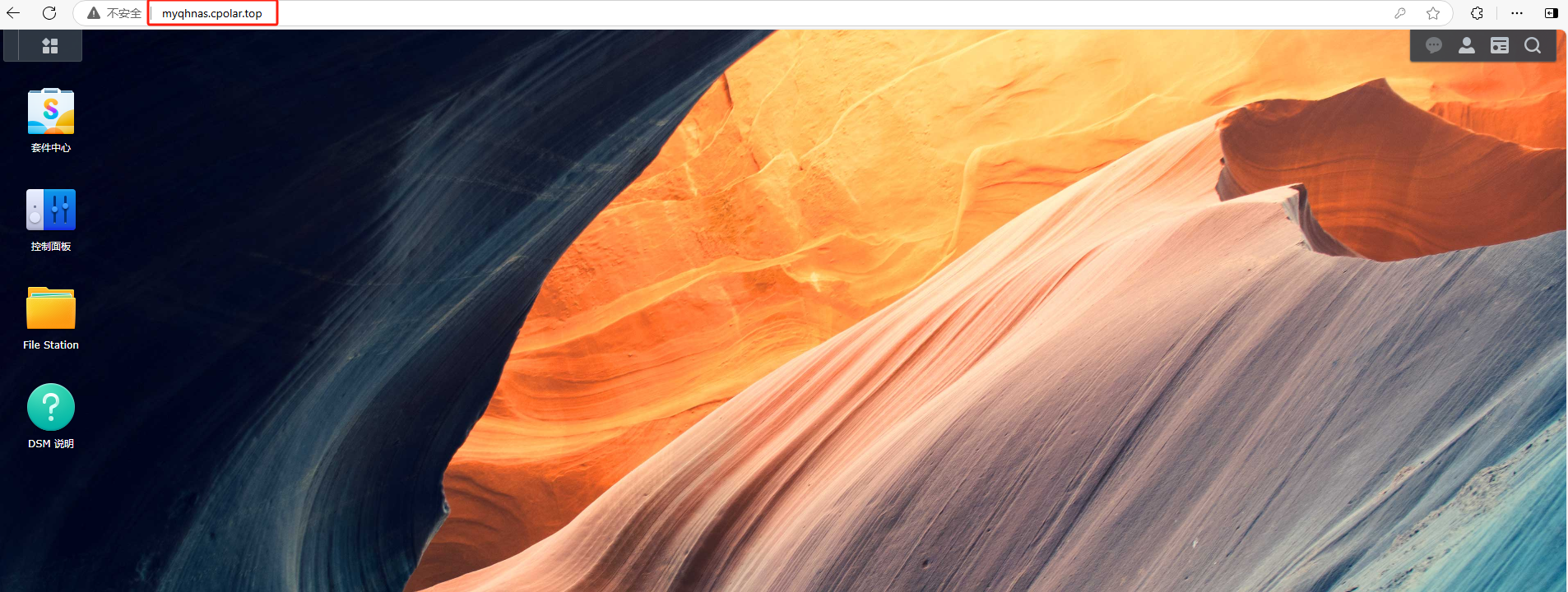
从零开始在Windows使用VMware虚拟机安装黑群晖7.2系统并实现远程访问
文章目录 前言1.软件准备2. 安装VMware17虚拟机3.安装黑群晖4. 安装群晖搜索助手5. 配置黑群晖系统6. 安装内网穿透6.1 下载cpolar套件6.2 配置群辉虚拟机6.3 配置公网地址6.4 配置固定公网地址 总结 前言 本文主要介绍如何从零开始在Windows系统电脑使用VMware17虚拟机安装黑…...

爬虫逆向:脱壳工具 frida-dexdump 的使用详解
更多内容请见: 爬虫和逆向教程-专栏介绍和目录 文章目录 1. 工具简介1.1 frida-dexdump介绍1.2 frida-dexdump支持场景1.3 frida-dexdump优点1.4 frida-dexdump工具使用方法2. 环境准备3. 安装 frida-dexdump4. 使用步骤4.1 步骤一:连接 Android 设备4.1 步骤二:安装目标应用…...
——查询计划相关操作符(9))
SQL Server查询计划操作符(7.3)——查询计划相关操作符(9)
7.3. 查询计划相关操作符 78)Repartition Streams:该操作符消费多个输入流并产生多个输出流。期间,记录内容与格式保持不变。如果查询优化器使用一个位图过滤(bitmap filter),则输出流中的数据行数将会减少。一个输入流的每行记录被放入一个输出流。如果该操作符保留顺序…...

【LeetCode101】对称二叉树
题目描述 给你一个二叉树的根节点 root , 检查它是否轴对称。 思路与算法 对称:左右子树互为镜像 这很显然暗示了一种递归方法 确定base case(s) 如果 left 和 right 都是 None ,那么它们是镜像的(对称&…...

K8s 1.27.1 实战系列(四)验证集群及应用部署测试
一、验证集群可用性 1、检查节点 kubectl get nodes ------------------------------------------------------ NAME STATUS ROLES AGE VERSION k8s-master Ready control-plane 3h48m v1.27.1 k8s-node1 Ready <none> …...
)
api测试工具(postman、apifox、apipost)
一、apifox 整体不错,免费版性能好,但内网(离线状态)初次使用需要登陆,无法通过。(即内网不可用) 二、postman 当测试项目多的时候可能会卡死,卡输入修改、丢失请求、登陆账号等问题…...
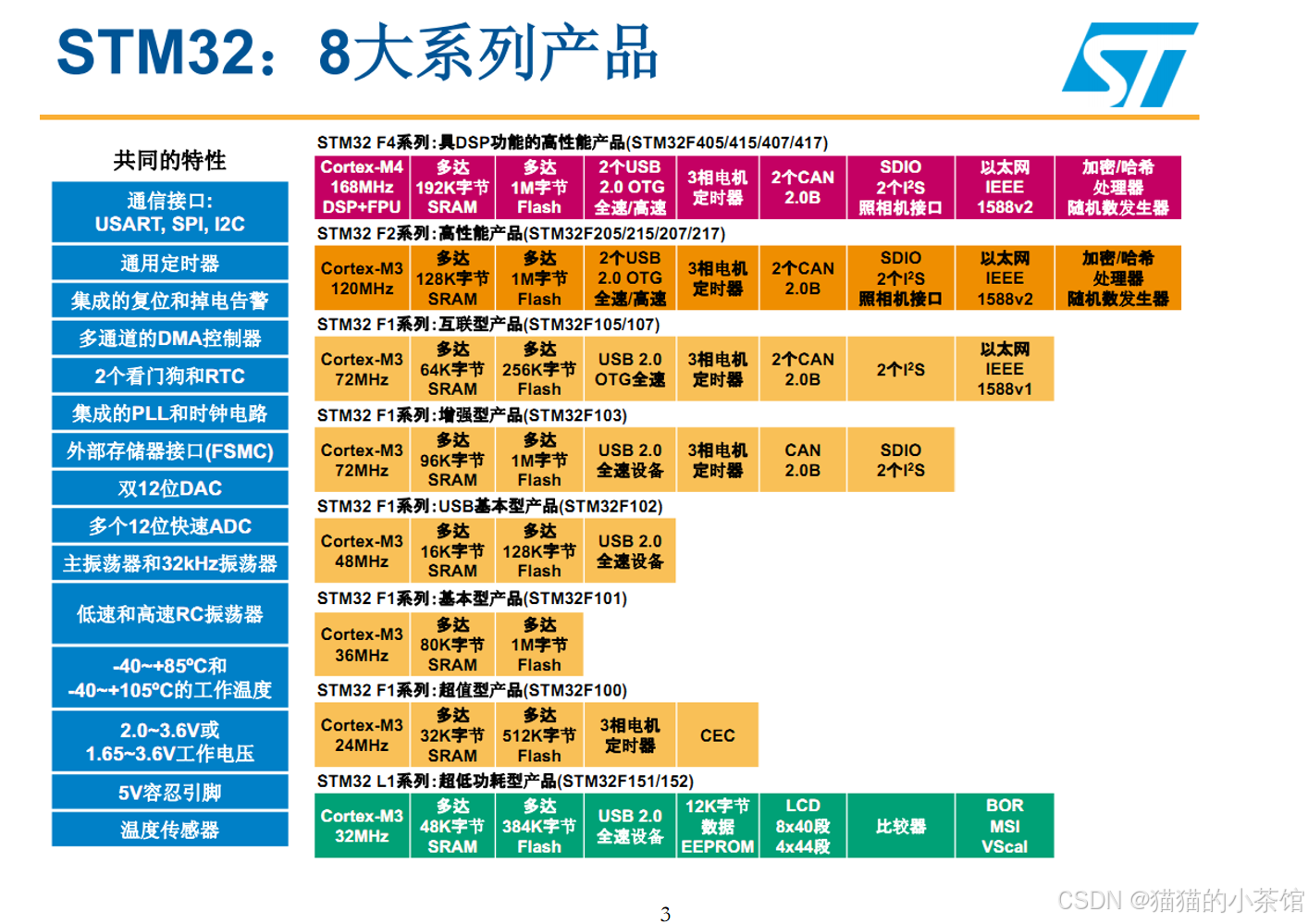
【STM32】STM32系列产品以及新手入门的STM32F103
📢 STM32F103xC/D/E 系列是一款高性能、低功耗的 32 位 MCU,适用于工业、汽车、消费电子等领域;基于 ARM Cortex-M3,主频最高 72MHz,支持 512KB Flash、64KB SRAM,适合复杂嵌入式应用,提供丰富的…...

pycharm找不到conda可执行文件
conda 24.9.2 在pycharm的右下角就可以切换python解释器了...

自注意力机制的演进-从Transformer架构到DeepSeek-R1模型的深度语义理解革新
2025年,我国发布了开创性且高性价比的大语言模型-DeepSeek-R1,推动了AI领域的重大变革。本章节回顾了LLM的发展历程,其起点可追溯至2017年Transformer架构的提出,该架构通过自注意力机制(Self-Attention)彻底革新了自然语言处理技…...

Redis 脚本:高效数据管理的利器
Redis 脚本:高效数据管理的利器 引言 Redis,作为一款高性能的键值存储数据库,以其丰富的数据结构和操作命令,在互联网应用中扮演着重要的角色。Redis 脚本作为一种强大的工具,能够帮助开发者高效地管理和处理数据。本文将深入探讨 Redis 脚本的应用场景、编写技巧以及在…...
(标准,C++11 和 C++14,C++17,C++20))
C++学习(十)(标准,C++11 和 C++14,C++17,C++20)
C 标准 C 标准是一组定义语言功能、语法和语义的规则和准则。国际标准化组织 (ISO) 负责维护和更新 C 标准。这些标准的主要目的是确保跨多个平台和编译器的一致性、效率和可维护性。 以下是迄今为止发布的不同 C 标准的简要摘要: C98/C03&…...

动态内存管理的了解及使用
目录 1.什么是动态内存? 2.为什么要使用动态内存分配空间? 3.动态内存开辟函数malloc,calloc,realloc 3.1 malloc 3.2 calloc 3.3 realloc 3.4 头文件包含 4.动态内存释放函数free 5.动态内存的基本常见错误 5.1 对NULL…...

大模型推理显存优化:从KV Cache压缩到量化策略实战
引言:显存瓶颈的困境 随着ChatGPT等大语言模型的广泛应用,模型推理过程中的显存占用问题日益凸显。以典型的Llama2-13B模型为例,单次推理就需要占用超过6GB显存,严重制约了服务吞吐量和硬件利用率。本文将深入探讨大模型推理中的…...

pom.xml配置(mybatisplus增删改查实现;PageInfo分页实现;JSONObject实现)
一、mybatisplus增删改查实现 pom.xml <!-- mybatis-plus --><dependency><groupId>com.baomidou</groupId><artifactId>mybatis-plus-boot-starter</artifactId><version>3.5.2</version></dependency>在mapper文件里…...

File文件和目录
一、文件和目录相关概念 计算机文件(File):以计算机硬盘为载体存储在计算机上的信息集合,可以是文本(.txt)、图片(.jpg、.png、.jpeg)、视频(.mp4)、程序(.exe)等,文件一般有拓展名,表示文件的类型。 文件…...

【运维笔记】Navicat中删除mongo 某个时间之前的数据
【运维笔记】Navicat中删除mongo 某个时间之前的数据 一、场景与需求1.1、场景1.2、需求 二、解决方案三、实战3.1、【Navicat】使用sql语句 (推荐)Step 1:使用查询窗口 - 查询Step 2:确认第一步的数据是否是需要删除的数据Step 3…...

BUUCTF逆向刷题笔记(1-12)
easyre、内涵的软件、xor、不一样的flag: buuctf reverse部分题解(实时更新)_reverse 题解-CSDN博客 请见小库里的blog。 reverse1 查壳发现没有,而且是64位 粗略改一下部分函数名,看看主要逻辑。 第一个for循环暂…...

如何改变怂怂懦弱的气质(2)
你是否曾经因为害怕失败而逃避选择?是否因为不敢拒绝别人而让自己陷入困境?是否因为过于友善而被人轻视?如果你也曾为这些问题困扰,那么今天的博客就是为你准备的。我们将从行动、拒绝、自我认知、实力提升等多个角度,…...

【DeepSeek】5分钟快速实现本地化部署教程
一、快捷部署 (1)下载ds大模型安装助手,下载后直接点击快速安装即可。 https://file-cdn-deepseek.fanqiesoft.cn/deepseek/deepseek_28348_st.exe (2)打开软件,点击立即激活 (3)选…...

算法之二维装水问题
目录 1. 题目2. 解释3. 思路4. 代码5. 总结 1. 题目 给定一个数组arr,已知其中所有的值都是非负的,将这个数组看作一个容器,请返回容器能装多少水 比如,arr {3,1,2,5,2,…...

[C语言日寄] 字符串操作函数的使用及其拓展
【作者主页】siy2333 【专栏介绍】⌈c语言日寄⌋:这是一个专注于C语言刷题的专栏,精选题目,搭配详细题解、拓展算法。从基础语法到复杂算法,题目涉及的知识点全面覆盖,助力你系统提升。无论你是初学者,还是…...

用Python的Pandas库解锁数据科学:从入门到实战
用Python的Pandas库解锁数据科学:从入门到实战 引言 Python的Pandas库(名称源自"Panel Data")作为数据科学生态系统的基石,凭借其强大的数据结构和灵活的操作功能,已成为全球超过90%数据工作者的首选工具。…...

利率债、信用债、可转债区别与优势
利率债、信用债、城投债和可转债是债券市场的主要品种,它们在发行主体、风险收益特征和投资优势上各有不同。以下是它们的区别和优势: 1. 利率债 定义:利率债是由政府或政府支持的机构发行的债券,主要包括国债、政策性金融债&…...

12、Vue 生命周期各阶段及任务
Vue 2 生命周期各阶段及任务 创建阶段 beforeCreate 此时实例刚刚初始化,数据观测(data)和 event/watcher 事件配置还未开始。通常在此阶段无法访问 data 中的数据和 methods 中的方法。可以进行一些与 Vue 实例无关的全局初始化操作&#x…...

AI进化太快,建立完善的AI理论迫在眉睫
如今的AI用日新月异来形容都毫不夸张。DeepSeek的热度还没降,Manus 又火了。随着AI越来越强大且进化速度越来越快,建立完善的AI理论迫在眉睫。 虽然AI是人类创造的,但是我们其实没有完全理解其原理。深度学习本质上还是一个黑盒,…...

MATLAB程序介绍,三维环境下的IMM(交互式多模型),使用CV和CT模型,EKF作为滤波
本文所述的MATLAB代码为三维的交互式多模型(IMM)滤波器,结合了匀速直线运动(CV模型)和匀速圆周运动(CT模型)的状态估计。使用扩展卡尔曼滤波(EKF)来处理状态更新与观测数…...
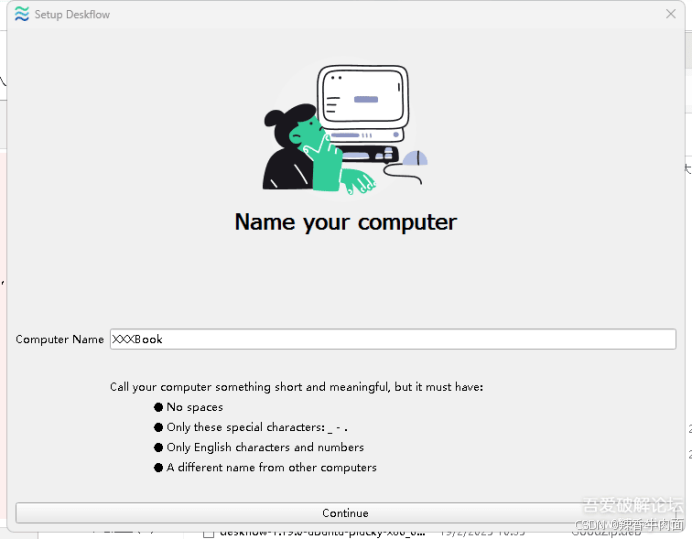
[Windows] 多系统键鼠共享工具 轻松跨系统控制多台电脑
参考原文:[Windows] 多系统键鼠共享工具 轻松跨系统控制多台电脑 还在为多台电脑需要多套键盘鼠标而烦恼吗?是不是在操控 Windows、macOS、Linux 不同系统电脑时手忙脚乱?现在,这些问题通通能解决!Deskflow 软件闪亮登…...

【leetcode hot 100 48】旋转图像
方法一:(原地旋转)对于矩阵中第 i 行的第 j 个元素,在旋转后,它出现在倒数第 i 列的第 j 个位置。matrix[row][col]在旋转后的新位置为matrix[col][n−row−1]。只要旋转四次就能回到原点。 class Solution {public vo…...