MuBlE:为机器人操作任务规划提供了逼真的视觉观察和精确的物理建模
2025-03-05,由华为诺亚方舟实验室、捷克技术大学和帝国理工学院联合开发的MuBlE(MuJoCo and Blender simulation Environment)模拟环境和基准测试。通过结合MuJoCo物理引擎和Blender高质量渲染,为机器人操作任务规划提供了逼真的视觉观察和精确的物理建模,填补了长时域机器人操作任务模拟环境的空白,为机器人操作任务的训练和评估提供了新的工具和挑战。
一、研究背景
机器人系统中,智能体需要根据视觉观察或自然语言指令完成指定任务,例如“将物体按重量从轻到重排序”。这些任务需要在模拟环境中生成数据或进行在线训练,并通过评估过程验证性能。然而,现有的模拟环境在物理仿真引擎和视觉观察质量上存在差异,难以同时满足高视觉质量和实时物理计算的需求。
目前遇到的困难和挑战:
1、视觉与物理的权衡:现有的模拟环境要么视觉效果不逼真,要么物理仿真不够精确,难以同时满足视觉和物理的高要求。
2、数据收集困难:真实世界中的机器人操作数据收集成本高昂,且受限于实时操作的复杂性。
3、长时域任务的挑战:当前的机器人智能体在需要与环境交互以获取必要信息的长时域任务中表现不佳,缺乏有效的训练环境和基准测试。
链接地址:MuBlE|机器人操作数据集|仿真环境数据集
二、让我们一起来看一下MuBlE
MuBlE(MuJoCo and Blender simulation Environment)是一个结合MuJoCo物理引擎和Blender高质量渲染的模拟环境,专注于长时域机器人操作任务,提供逼真的视觉观察和精确的物理建模。
MuBlE基于robosuite框架开发,利用MuJoCo进行物理仿真,并通过Blender进行高质量渲染,生成逼真的视觉数据。它支持多模态数据生成,包括场景合成、指令生成、场景图生成、任务完成评估以及物理属性观察(如重量、弹性等)。此外,MuBlE还提供了多种原语动作控制器,支持连续和离散动作空间。
MuBlE构建:
场景生成器:随机放置物体并生成场景,支持物体的颜色、材质和大小随机化。
指令生成器:基于场景生成自然语言指令,支持多步推理任务。
物理和视觉循环:通过MuJoCo和Blender实现物理仿真与视觉渲染的同步更新。
MuBlE特点:
逼真的视觉效果:通过Blender生成高质量的渲染图像,支持阴影、反射和不同光照条件。
精确的物理建模:利用MuJoCo实现高精度的物理仿真,支持复杂的机械系统。
多模态数据支持:提供视觉、语言和物理属性的多模态数据,支持长时域任务规划。
模块化设计:易于扩展和定制,支持多种任务和场景。
基准测试:
MuBlE配套发布了SHOP-VRB2基准测试,包含10类多步推理任务,涉及视觉属性(如物体属性、关系)和物理测量(如重量、弹性)。基准测试包括12,000个场景,涵盖单步和多步操作任务,如视觉问答(VQA)、具身问答(EQA)和视觉-语言-动作(VLA)任务。

拟议的 SHOP-VRB2 基准测试中的一个示例任务,展示了拟议的 MuBlE 环境的功能:合成场景和指令生成、执行符号作进行作,然后进行物理计算和逼真渲染。图像中标记了相应目标的符号作。

显示了 MuBlE 环境的各个模块的图表,包括如何将推理方法集成到 MuBlE 环境中。显示了 SHOP-VRB2 基准测试的示例说明和场景。传输数据的符号: 𝚃 - 查询文本, 𝙸 - 图像, 𝙶 - 场景图, 𝙿 - 物理观察, 𝙲 - 控制信号, 𝙰 - 要采取的原始作, 𝚁 - 返回的结果, 𝙶𝚃 - 地面实况数据。

MuBlE(黄色)和推理方法(橙色)之间交互的示例。图显示了选定的测量值 𝙿 和基于它们生成的基元作 𝙰 ,然后是环境中场景的相应更新。

与拟议数据集中的基准测试任务相对应的指令模板。

SHOP-VRB2 示例:使用 MuBlE 生成的自然语言模拟场景示例和相应指令(在数据集中,从左到右的指令属于表 II 中的任务 7、3 和 1)。

为与指令对应的作生成的视觉观察(选定帧)示例:从最重到最轻堆叠金属对象。(左)Blender 在 MuBlE 中渲染的模拟 YCB 场景,以及(右)Realsense 相机在真实实验期间使用在模拟 SHOP-VRB2 数据集上的 MuBlE 环境中预训练的推理捕获的相应真实 YCB 场景。

SHOP-VRB2 (sim) 和 YCB 数据集 (sim/real) 上基线方法的成功率。

使用 YCB 对象的真实设置(左)、使用估计姿势的相应 MuJoCo 模拟(中)以及 CosyPose 检测到的带有叠加灰色模型的彩色点云的 RViz 可视化(右)。
三、让我们一起来看一下MuBlE 的应用场景
场景:按照物体重量从重到轻堆叠物体
以前的工作方式:
以前,机器人在堆叠物体时,主要依赖于预设的程序和简单的传感器数据。比如,它可能会用一个普通的传感器大致估计物体的重量,然后按照一个固定的顺序去堆叠。但这种方法很不灵活,如果物体的重量差异不大,或者传感器精度不高,机器人很容易堆不好,甚至把物体弄倒。而且,它很难根据物体的实际重量动态调整堆叠顺序,更别提考虑堆叠的稳定性了。
现在可不一样了,来,看看
现在有了MuBlE环境,机器人可以更聪明地完成任务。首先,它会用高精度的传感器(比如在MuBlE环境中模拟的物理测量工具)去精确测量每个物体的重量。然后,它会根据测量结果,动态规划堆叠顺序,先把最重的物体放在下面,最轻的放在上面。同时,机器人还会实时考虑堆叠的稳定性。比如,如果它发现某个物体放上去后可能会让整个堆叠结构不稳定,它就会调整物体的位置或者重新选择堆叠顺序。
而且,MuBlE环境还能通过高质量的渲染和物理模拟,让机器人在虚拟环境中先进行练习。这样,机器人可以在模拟环境中不断试错,优化堆叠策略,直到找到最稳定、最高效的方法。这样一来,当机器人真正去操作真实物体时,成功率就会大大提高。
这种改进不仅让机器人在堆叠任务中表现得更智能,还为复杂机器人操作任务的训练和评估提供了更强大的工具。
更多开源的数据集,请打开遇见数据集:
遇见数据集-让每个数据集都被发现,让每一次遇见都有价值。遇见数据集,领先的千万级数据集搜索引擎,实时追踪全球数据集,助力把握数据要素市场。![]() https://www.selectdataset.com/
https://www.selectdataset.com/
相关文章:
MuBlE:为机器人操作任务规划提供了逼真的视觉观察和精确的物理建模
2025-03-05,由华为诺亚方舟实验室、捷克技术大学和帝国理工学院联合开发的MuBlE(MuJoCo and Blender simulation Environment)模拟环境和基准测试。通过结合MuJoCo物理引擎和Blender高质量渲染,为机器人操作任务规划提供了逼真的视…...

工具介绍《HACKBAR V2》
HackBar V2 是一款功能强大的浏览器渗透测试工具,主要用于测试 SQL 注入、XSS 漏洞、POST 传参等安全场景。以下是其核心功能、用法及实际案例操作的综合介绍: 一、核心功能与用法详解 1. 基础操作 Load URL 功能:将当前浏览器地址栏的 URL …...
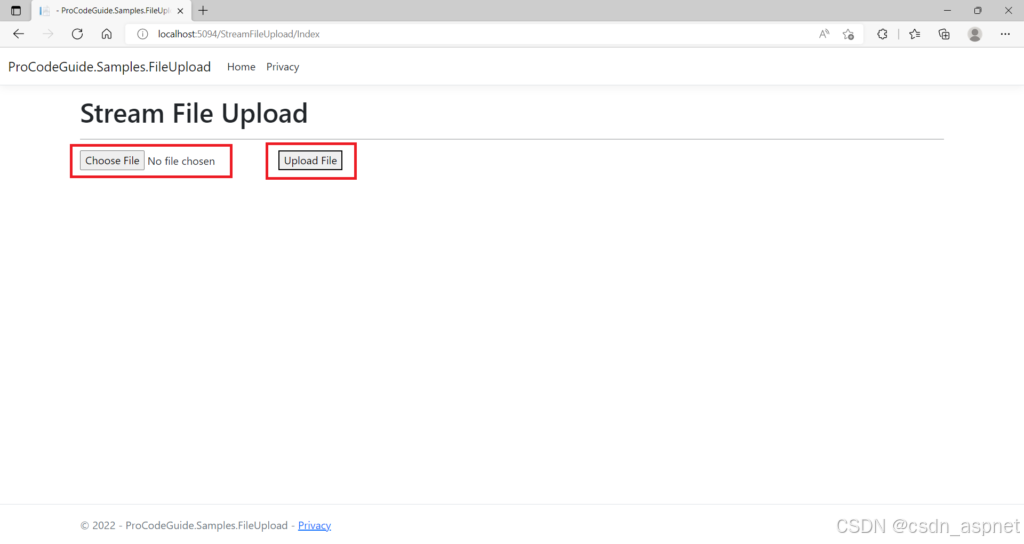
ASP.NET Core 6 MVC 文件上传
概述 应用程序中的文件上传是一项功能,用户可以使用该功能将用户本地系统或网络上的文件上传到 Web 应用程序。Web 应用程序将处理该文件,然后根据需要对文件进行一些验证,最后根据要求将该文件存储在系统中配置的用于保存文件的存储中&#…...

2025年03月07日Github流行趋势
项目名称:ai-hedge-fund 项目地址url:https://github.com/virattt/ai-hedge-fund项目语言:Python历史star数:12788今日star数:975项目维护者:virattt, seungwonme, KittatamSaisaard, andorsk, arsaboo项目…...

JAVA入门——网络编程简介
自己学习时的笔记,可能有点水( 以后可能还会补充(大概率不会) 一、基本概念 网络编程三要素: IP 设备在网络中的唯一标识 端口号 应用软件在设备中的唯一标识两个字节表示的整数,0~1023用于知名的网络…...
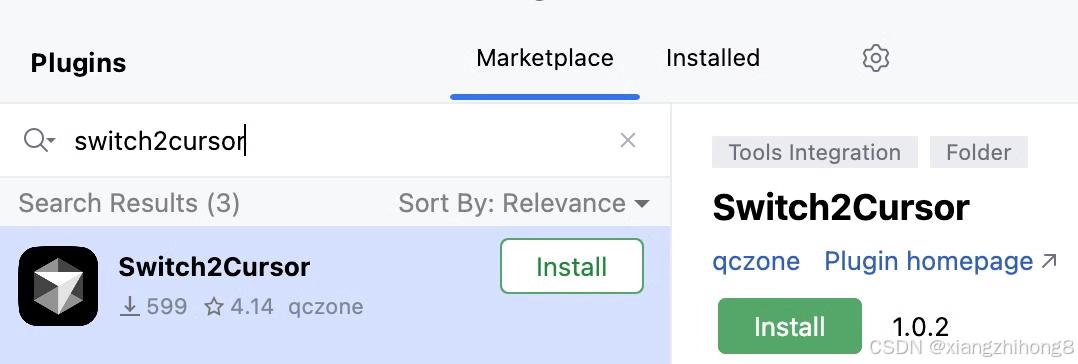
Cursor + IDEA 双开极速交互
相信很多开发者朋友应该和我一样吧,都是Cursor和IDEA双开的开发模式:在Cursor中快速编写和生成代码,然后在IDEA中进行调试和优化 在这个双开模式的开发过程中,我就遇到一个说大不大说小不小的问题: 得在两个编辑器之间来回切换查…...

3.3.2 用仿真图实现点灯效果
文章目录 文章介绍Keil生成.hex代码Proteus仿真图中导入.hex代码文件开始仿真 文章介绍 点灯之前需要准备好仿真图keil代码 仿真图参考前文:3.3.2 Proteus第一个仿真图 keil安装参考前文:3.1.2 Keil4安装教程 keil新建第一个项目参考前文:3.1…...

点云软件VeloView开发环境搭建与编译
官方编译说明 LidarView / LidarView-Superbuild GitLab 我的编译过程: 安装vs2019,windows sdk,qt5.14.2(没安装到5.15.7),git,cmake3.31,python3.7.9,ninja下载放到…...

Java入门:环境搭建与第一个HelloWorld程序
一、环境搭建前的准备 1. JDK vs JRE的区别 JRE(Java Runtime Environment):只能运行Java程序JDK(Java Development Kit):包含JRE 开发工具(javac/java等) ❗ 结论:开…...

PDF处理控件Aspose.PDF,如何实现企业级PDF处理
PDF处理为何成为开发者的“隐形雷区”? “手动调整200页PDF目录耗时3天,扫描件文字识别错误导致数据混乱,跨平台渲染格式崩坏引发客户投诉……” 作为开发者,你是否也在为PDF处理的复杂细节消耗大量精力?Aspose.PDF凭…...

大白话如何利用 CSS 实现一个三角形?原理是什么?
大白话如何利用 CSS 实现一个三角形?原理是什么? 答题思路 先说明实现三角形的方法基础:即利用 CSS 中元素的边框特性来构建三角形,让读者对整体思路有个初步概念。详细阐述具体的实现步骤:包括设置元素的基本样式&a…...

js操作字符串的常用方法
1. 查找和截取 1.1 indexOf 作用:查找子字符串在字符串中首次出现的位置。 是否改变原字符串:不会改变原字符串。 返回值:如果找到子字符串,返回其起始索引(从 0 开始);如果未…...

PostgreSQL 如何有效地处理数据的加密和解密
对安全级别要求较高的项目,对敏感数据都要求加密保存。 在 PostgreSQL 中处理数据的加密和解密可以通过多种方式实现,以确保数据的保密性和安全性。 我这里提供几种常见的方法。 一、使用 pgcrypto 扩展 pgcrypto 是 PostgreSQL 中一个常用的扩展&am…...

《2025年软件测试工程师面试》消息队列面试题
消息队列 消息队列(Message Queue,简称 MQ)是一种应用程序之间的通信方法。 基本概念 消息队列是一种先进先出(FIFO)的数据结构,它允许一个或多个消费者从队列中读取消息,也允许一个或多个生产者…...

大数据学习(55)-BI工具数据分析的使用
&&大数据学习&& 🔥系列专栏: 👑哲学语录: 承认自己的无知,乃是开启智慧的大门 💖如果觉得博主的文章还不错的话,请点赞👍收藏⭐️留言📝支持一下博主哦ᾑ…...

原生android 打包.aar到uniapp使用
1.原生安卓里面引入uniapp官方提供的包文件: uniapp-v8-release.aar 2.提供uniapp调用的接口,新建类文件继承UniModule, package com.dermandar.panoramal;import com.scjt.lib.certlib;import io.dcloud.feature.uniapp.annotation.UniJSM…...

解锁MacOS开发:环境配置与应用开发全攻略
✨✨✨这里是小韩学长yyds的BLOG(喜欢作者的点个关注吧) ✨✨✨想要了解更多内容可以访问我的主页 小韩学长yyds-CSDN博客 目录 引言 一、MacOS 开发环境配置 (一)必备工具安装 (二)集成开发环境(IDE)选…...

Aruco 库详解:计算机视觉中的高效标记检测工具
1. 引言:Aruco 在计算机视觉中的重要性 在计算机视觉领域,标记(Marker)检测和识别是许多应用的基础,包括 机器人导航、增强现实(AR)、相机标定(Calibration)以及物体跟踪…...

第005文-模拟入侵网站实现0元购
1、部署导入靶场,部署购物网站 首先在虚拟机中新增一个centos虚拟机,在上面部署一套完整的购物网站,使用mysql数据库,访问端口是80。这个新增的centos虚拟机就是我们的靶场。购物网站在网上随便找一套开源的部署即可。 2、在网站…...

unity3d 背景是桌面3d数字人,前面是web的表单
是可以实现的,但涉及多个技术栈的结合,包括 Unity3D、Web 技术(HTML、JavaScript)、以及可能的 WebGL 或 WebRTC 技术。大致有以下几种实现方案: 方案 1:Unity 作为独立应用(桌面端࿰…...
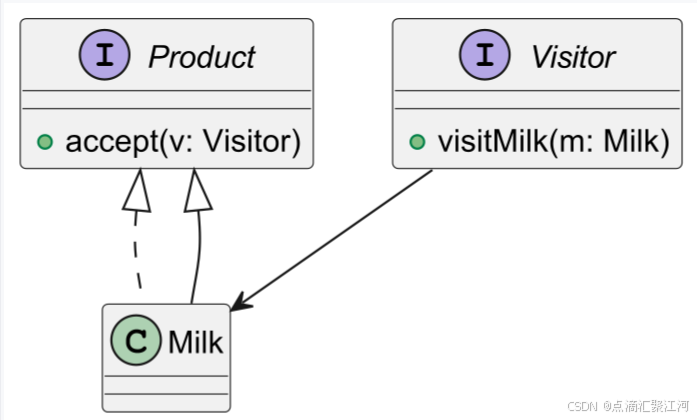
23种设计模式简介
一、创建型(5种) 1.工厂方法 总店定义制作流程,分店各自实现特色披萨(北京店-烤鸭披萨,上海店-蟹粉披萨) 2.抽象工厂 套餐工厂(家庭装含大披萨薯条,情侣装含双拼披萨红酒&#…...

淘宝关键字搜索接口爬虫测试实战指南
在电商数据分析和市场研究中,通过关键字搜索获取淘宝商品信息是一项重要任务。淘宝开放平台提供了 item_search 接口,允许开发者通过关键字搜索商品,并获取商品列表及相关信息。本文将详细介绍如何设计并测试一个基于该接口的爬虫程序&#x…...

IntelliJ IDEA 中配置 Groovy
在 IntelliJ IDEA 中配置 Groovy 环境可以分为以下几个步骤 1. 安装 Groovy 插件 步骤: 打开 IntelliJ IDEA,进入菜单栏:File → Settings(Windows/Linux)或 IntelliJ IDEA → Preferences(Mac࿰…...

【Linux 22.4 ubuntu 安装cuda12.1 完整方案】
下载cuda12.1 官网网址 wget https://developer.download.nvidia.com/compute/cuda/12.1.1/local_installers/cuda_12.1.1_530.30.02_linux.run sudo sh cuda_12.1.1_530.30.02_linux.run!import! 如果已经安装驱动,则不要选择dirver那项 添加环境变量 vim ~/.b…...

使用AI整理知识点--WPF动画核心知识
一、WPF动画基础 1、动画本质 通过随时间改变依赖属性值实现视觉效果(如位置、透明度、颜色等)。 依赖属性必须支持 DependencyProperty,且需是可动画的(如 Double, Color, Point 等)。 2、动画三要素 起始值 (Fr…...

HTML前端手册
HTML前端手册 记录前端框架在使用过程中遇到的各种问题和解决方案,供后续快速进行手册翻阅使用 文章目录 HTML前端手册1-前端框架1-TypeScript框架2-CSS框架 2-前端Demo1-Html常用代码 2-知云接力3-Live2D平面动画 3-前端运维1-NPM版本管理 1-前端框架 1-TypeScrip…...

风控模型算法面试题集结
特征处理 1. 特征工程的一般步骤什么?什么是特征迭代 特征工程一般包含: 数据获取,分析数据的可用性(覆盖率,准确率,获取容易程度)数据探索,分析数据业务含义,对特征有一个大致了解,同时进行数据质量校验,包含缺失值、异常值和一致性等;特征处理,包含数据处理和…...
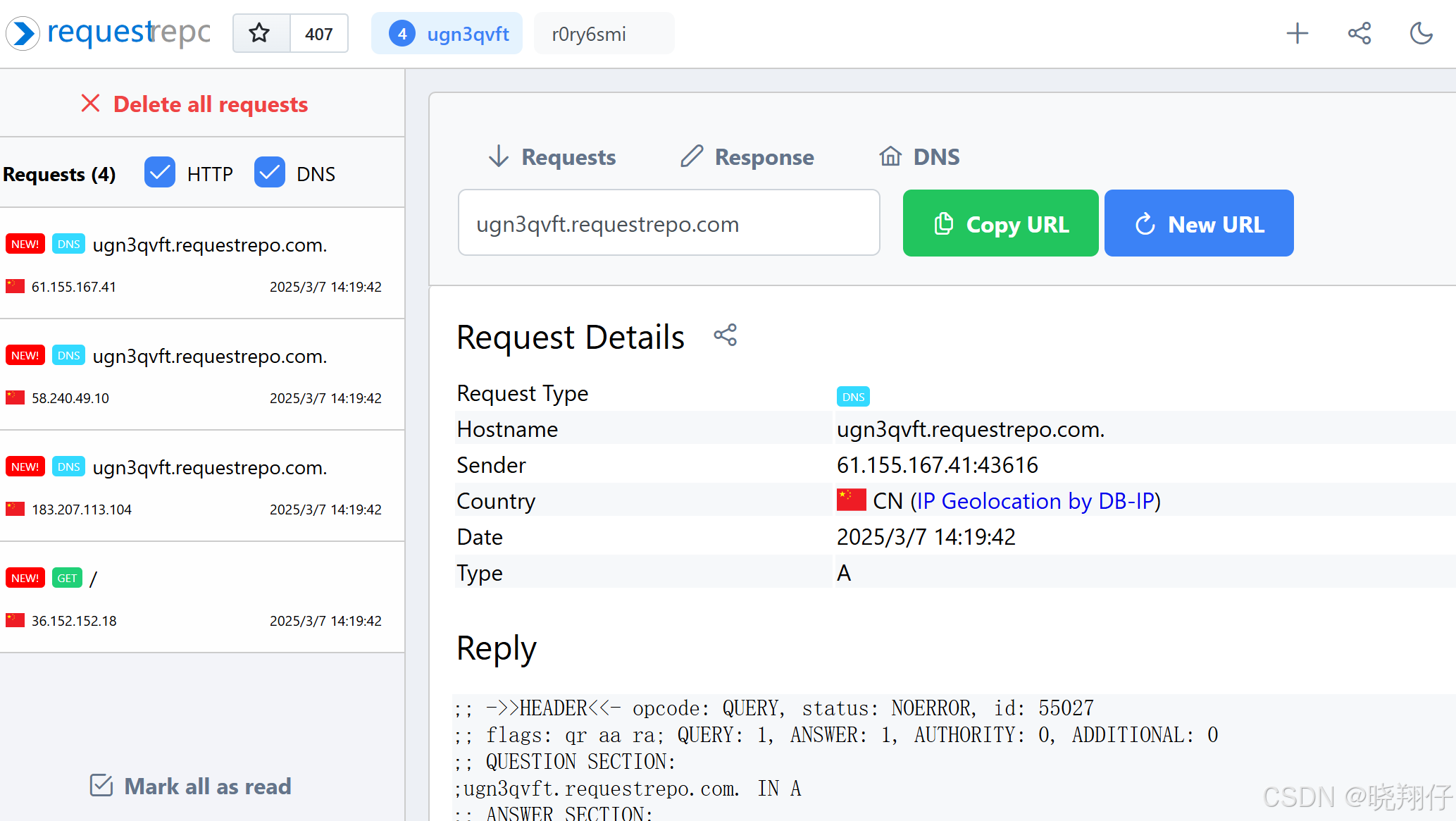
利用 requestrepo 工具验证 XML外部实体注入漏洞
1. 前言 在数字化浪潮席卷的当下,网络安全的重要性愈发凸显。应用程序在便捷生活与工作的同时,也可能暗藏安全风险。XXE(XML外部实体)漏洞作为其中的典型代表,攻击者一旦利用它,便能窃取敏感信息、掌控服务…...
引领变革!北京爱悦诗科技有限公司荣获“GAS消费电子科创奖-产品创新奖”!
在2025年“GAS消费电子科创奖”评选中,北京爱悦诗科技有限公司提交的“aigo爱国者GS06”,在技术创新性、设计创新性、工艺创新性、智能化创新性及原创性五大维度均获得评委的高度认可,荣获“产品创新奖”。 这一奖项不仅是对爱悦诗在消费电子…...

MySQL JOIN 与子查询深度对比:原理、性能陷阱与优化策略
1. 基础概念:JOIN 与子查询的本质区别 1.1 JOIN 的核心作用 目标:直接关联两个表的行,通过匹配条件(如 ON 或 USING)合并数据。典型场景:需要同时获取两个表的字段(如 SELECT A.col, B.col FROM A JOIN B)。执行逻辑: 数据库一次性处理两表关系,优化器可能选择 Nest…...