Aruco 库详解:计算机视觉中的高效标记检测工具
1. 引言:Aruco 在计算机视觉中的重要性
在计算机视觉领域,标记(Marker)检测和识别是许多应用的基础,包括 机器人导航、增强现实(AR)、相机标定(Calibration)以及物体跟踪 等。其中,Aruco 库 是一个广泛使用的 开源标记检测工具,它基于 OpenCV 开发,能够快速可靠地检测、识别和跟踪二维标记(fiducial markers)。
Aruco 标记是一种类似于二维码的方形图案,包含唯一的二进制 ID,并且能够被计算机视觉算法轻松识别。与传统的二维码不同,Aruco 主要用于 定位、空间映射和相机姿态估计(Pose Estimation),因此在机器人学、AR 应用和工业视觉检测中扮演着重要角色。
本文将深入解析 Aruco 库的 工作原理、核心功能、应用场景、实践示例 以及 潜在的挑战和优化策略,帮助你全面理解如何利用 Aruco 进行高效的计算机视觉开发。
2. Aruco 标记的基本概念
2.1 什么是 Aruco 标记?
Aruco 标记是一种 二进制方形标记,通常由一个黑色边框和一个内部的唯一编码组成,如下图所示:
+------------+
| |
| 01010 |
| 11001 |
| 10100 |
| |
+------------+
它与二维码(QR Code)的主要区别在于:
- Aruco 不用于存储大规模数据,而仅用于存储少量 ID 信息。
- 它的边框清晰,有助于 快速检测和姿态估计。
- 由于模式固定,Aruco 检测 速度更快,误识别率更低。
Aruco 标记通常被用于相机标定、机器人导航、物体跟踪等任务中,特别适合需要 精确空间定位 的应用场景。
2.2 Aruco 库的核心模块
Aruco 库是 OpenCV 生态的一部分,主要提供以下核心功能:
✅ 标记检测(Marker Detection)
能够从图像中快速检测并识别 Aruco 标记的位置和 ID。
✅ 姿态估计(Pose Estimation)
通过标记的位置计算 相机的姿态(3D 位置和旋转角度),广泛用于 AR 和 SLAM(同步定位与建图)。
✅ 相机标定(Camera Calibration)
利用 Aruco 生成的标记阵列(Chessboard-like Pattern)来校正相机的 内参矩阵,提高计算机视觉系统的精度。
✅ 自定义字典(Custom Dictionary)
可以创建自定义标记集合,避免与已有的 Aruco ID 发生冲突,提高识别的安全性和唯一性。
3. Aruco 标记检测的工作原理
Aruco 标记检测的基本流程如下:
3.1 图像预处理
- 灰度化(Grayscale Conversion):将输入图像转换为灰度,以减少计算量。
- 阈值化(Thresholding):二值化处理,以突出黑白对比,提高检测精度。
3.2 轮廓检测
- 通过 边缘检测(Edge Detection) 和 连通区域分析(Connected Component Analysis) 提取可能的标记区域。
- 利用 四边形拟合算法 识别出潜在的 Aruco 标记区域。
3.3 二进制编码解析
- 将提取的方形区域按照预定义字典(Dictionary)进行比对。
- 使用 汉明距离(Hamming Distance) 检查识别的正确性,并纠正误差。
3.4 姿态估计
- 通过 PnP 算法(Perspective-n-Point) 计算相机的 3D 姿态。
- 需要使用相机的 内参矩阵(Camera Intrinsics) 进行校正。
通过上述步骤,Aruco 库能够精准检测标记的位置和 ID,并计算它在 3D 空间中的姿态。
4. Aruco 的应用场景
Aruco 在多个计算机视觉领域中都有广泛应用,主要包括以下场景:
4.1 机器人导航 🚗🤖
- 在机器人导航和自动驾驶中,Aruco 可以作为 路标,帮助机器人确定自身位置并规划路径。
- 通过检测 Aruco 标记的 ID 和相对位置,机器人可以执行精准的路径跟踪。
4.2 增强现实(AR) 🎮📱
- 在 AR 应用中,Aruco 标记可以用来 计算相机的姿态,从而让虚拟物体精准地叠加在现实环境中。
- 许多 AR 设备(如 Microsoft HoloLens、Magic Leap)都使用类似的标记进行空间映射。
4.3 相机标定 📷
- Aruco 库可以生成棋盘样式的标记阵列,用于相机 畸变校正 和 焦距计算。
- 通过多个不同角度拍摄的 Aruco 阵列,可以提高相机校准的精度。
4.4 物体跟踪与测量 📏
- 在工业检测和智能制造中,Aruco 标记可以帮助 精确测量物体的尺寸、角度和位置,提高自动化生产线的准确性。
5. Aruco 实践示例:Python 代码演示
生成一个图:
import cv2
import numpy as np# 获取预定义的 ArUco 字典
aruco_dict = cv2.aruco.getPredefinedDictionary(cv2.aruco.DICT_ARUCO_ORIGINAL)# 设定 4 个标记的 ID(可以自己调整)
marker_ids = [10, 20, 30, 40] # 确保 ID 唯一
marker_size = 200 # 每个标记的大小(像素)# 创建白色背景图像(比如 1000x1000 像素)
board_size = 1000
aruco_board = np.full((board_size, board_size), 255, dtype=np.uint8)# 创建 4 个 ArUco 标记并放置在四个角落
for i, marker_id in enumerate(marker_ids):marker_img = cv2.aruco.drawMarker(aruco_dict, marker_id, marker_size)# 根据索引确定标记位置if i == 0: # 左上角aruco_board[0:marker_size, 0:marker_size] = marker_imgelif i == 1: # 右上角aruco_board[0:marker_size, -marker_size:] = marker_imgelif i == 2: # 左下角aruco_board[-marker_size:, 0:marker_size] = marker_imgelse: # 右下角aruco_board[-marker_size:, -marker_size:] = marker_img# 保存 ArUco 标记板
cv2.imwrite("aruco_board.png", aruco_board)# 显示结果
cv2.imshow("ArUco Board", aruco_board)
cv2.waitKey(0)
cv2.destroyAllWindows()运行后:

以下是一个 基于 OpenCV 的 Aruco 标记检测代码,可以帮助你快速入门:
import cv2
import numpy as np
import imutils
#pip install opencv-contrib-python==4.6.0.66
def order_points(pts):# 初始化排序后的点的列表rect = np.zeros((4, 2), dtype=np.float32)# pts的和将作为排序的依据s = pts.sum(axis=1)# 左上角的点将有最小的和rect[0] = pts[np.argmin(s)]# 右下角的点将有最大的和rect[2] = pts[np.argmax(s)]# pts的差将作为排序的依据diff = np.diff(pts, axis=1)# 右上角的点将有最小的差rect[1] = pts[np.argmin(diff)]# 左下角的点将有最大的差rect[3] = pts[np.argmax(diff)]return rectdef detect_color_correction_card(image_path):# Load imageimage = cv2.imread(image_path)# Resize image image = imutils.resize(image, width=600)# Convert to grayscalegray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# Create ArUco dictionary and parametersarucoDict = cv2.aruco.Dictionary_get(cv2.aruco.DICT_ARUCO_ORIGINAL)arucoParams = cv2.aruco.DetectorParameters_create()# Detect ArUco markers(corners, ids, rejected) = cv2.aruco.detectMarkers(gray, arucoDict, parameters=arucoParams)# Check if markers are detectedif ids is not None and len(ids) > 0:try:ids = ids.flatten()print(ids) if all(id in ids for id in ids):# 创建一个字典来存储每个ID对应的角点marker_corners = {}for i, marker_id in enumerate(ids):corner = np.squeeze(corners[i])marker_corners[marker_id] = corner# 收集所有标记的所有角点all_corners = []for corner in corners:corner = np.squeeze(corner)for point in corner:all_corners.append(point)# 将所有角点转换为numpy数组all_corners = np.array(all_corners, dtype=np.float32)# 计算凸包hull = cv2.convexHull(all_corners)hull = np.squeeze(hull)# 找到最小外接矩形的四个角点rect = cv2.minAreaRect(hull)box = cv2.boxPoints(rect)box = np.array(box, dtype=np.float32)print(box)# 对这四个角点进行排序ordered_corners = order_points(box)# 找到ID为10的标记的位置marker_10_corners = marker_corners[10]marker_10_center = np.mean(marker_10_corners, axis=0)# 找到ordered_corners中最接近marker_10_center的点的索引distances = np.linalg.norm(ordered_corners - marker_10_center, axis=1)marker_10_idx = np.argmin(distances)# 如果ID为10的标记不在左上角,重新排序点if marker_10_idx != 0:ordered_corners = np.roll(ordered_corners, -marker_10_idx, axis=0)# 扩大边界以确保包含所有标记# 计算边界扩展因子padding = 0 # 可以调整这个值# 获取排序后的角点topLeft, topRight, bottomRight, bottomLeft = ordered_corners# 向外扩展边界vector_top = topRight - topLeftvector_left = bottomLeft - topLefttopLeft = topLeft - (vector_top + vector_left) * padding / 100topRight = topRight + (vector_top - vector_left) * padding / 100bottomRight = bottomRight + (vector_top + vector_left) * padding / 100bottomLeft = bottomLeft + (-vector_top + vector_left) * padding / 100# print([topLeft, topRight, bottomRight, bottomLeft])# Prepare points for perspective transformpts1 = np.float32([topLeft, topRight, bottomRight, bottomLeft])# Define destination pointswidth, height = 300, 600pts2 = np.float32([[0, 0], # Top-left (ID 10)[width-1, 0], # Top-right[width-1, height-1], # Bottom-right[0, height-1] # Bottom-left])# Compute perspective transform matrixmatrix = cv2.getPerspectiveTransform(pts1, pts2)# Apply perspective transformationwarped = cv2.warpPerspective(image, matrix, (width, height))# Draw detected markers on original imagecv2.aruco.drawDetectedMarkers(image, corners, ids)# Display resultscv2.namedWindow('Original Image', cv2.WINDOW_NORMAL)cv2.namedWindow('Warped Image', cv2.WINDOW_NORMAL)cv2.imshow('Original Image', image)cv2.imshow('Warped Image', warped)cv2.waitKey(0)cv2.destroyAllWindows()return warpedelse:print("Not all expected markers found")return Noneexcept Exception as e:print(f"An error occurred: {e}")return Noneelse:print("No ArUco markers detected")return None# Usage example
result = detect_color_correction_card('14.png')
原图

识别后:


运行效果:
- 代码会在图像中检测 Aruco 标记,并在检测到的标记上绘制边框和 ID。
- 你可以尝试不同的 Aruco 字典(DICT_4X4_50、DICT_6X6_100 等) 来生成不同种类的标记。
6. Aruco 的挑战与优化策略
⚠ 误检测问题
- 复杂背景可能导致误检测,可以使用 自适应阈值化 提高精度。
⚠ 标记角度影响
- 角度过大时,透视变形可能影响识别,建议使用 PnP 进行姿态优化。
⚠ 光照变化
- 低光环境下,推荐使用 HDR 预处理,增强标记的对比度。
7. 结论
Aruco 是一个强大且高效的计算机视觉工具,广泛应用于 机器人、AR、相机标定和物体跟踪 领域。它的高检测速度和低误识别率使其成为许多项目的首选方案。
如果你正在开发涉及 空间定位、相机标定或增强现实 的应用,Aruco 绝对是一个值得深入研究的技术! 🚀
相关文章:
Aruco 库详解:计算机视觉中的高效标记检测工具
1. 引言:Aruco 在计算机视觉中的重要性 在计算机视觉领域,标记(Marker)检测和识别是许多应用的基础,包括 机器人导航、增强现实(AR)、相机标定(Calibration)以及物体跟踪…...

第005文-模拟入侵网站实现0元购
1、部署导入靶场,部署购物网站 首先在虚拟机中新增一个centos虚拟机,在上面部署一套完整的购物网站,使用mysql数据库,访问端口是80。这个新增的centos虚拟机就是我们的靶场。购物网站在网上随便找一套开源的部署即可。 2、在网站…...

unity3d 背景是桌面3d数字人,前面是web的表单
是可以实现的,但涉及多个技术栈的结合,包括 Unity3D、Web 技术(HTML、JavaScript)、以及可能的 WebGL 或 WebRTC 技术。大致有以下几种实现方案: 方案 1:Unity 作为独立应用(桌面端࿰…...
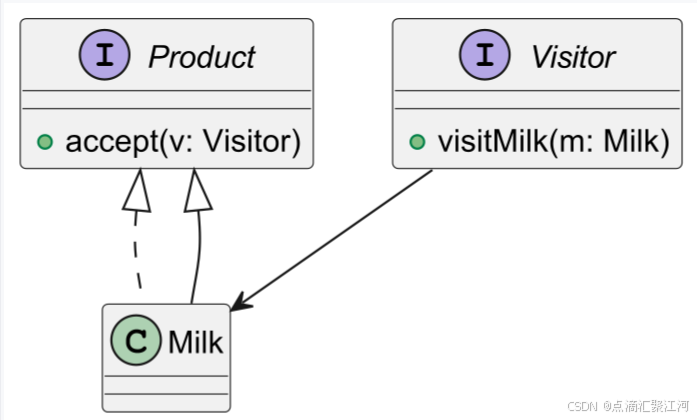
23种设计模式简介
一、创建型(5种) 1.工厂方法 总店定义制作流程,分店各自实现特色披萨(北京店-烤鸭披萨,上海店-蟹粉披萨) 2.抽象工厂 套餐工厂(家庭装含大披萨薯条,情侣装含双拼披萨红酒&#…...

淘宝关键字搜索接口爬虫测试实战指南
在电商数据分析和市场研究中,通过关键字搜索获取淘宝商品信息是一项重要任务。淘宝开放平台提供了 item_search 接口,允许开发者通过关键字搜索商品,并获取商品列表及相关信息。本文将详细介绍如何设计并测试一个基于该接口的爬虫程序&#x…...

IntelliJ IDEA 中配置 Groovy
在 IntelliJ IDEA 中配置 Groovy 环境可以分为以下几个步骤 1. 安装 Groovy 插件 步骤: 打开 IntelliJ IDEA,进入菜单栏:File → Settings(Windows/Linux)或 IntelliJ IDEA → Preferences(Mac࿰…...

【Linux 22.4 ubuntu 安装cuda12.1 完整方案】
下载cuda12.1 官网网址 wget https://developer.download.nvidia.com/compute/cuda/12.1.1/local_installers/cuda_12.1.1_530.30.02_linux.run sudo sh cuda_12.1.1_530.30.02_linux.run!import! 如果已经安装驱动,则不要选择dirver那项 添加环境变量 vim ~/.b…...

使用AI整理知识点--WPF动画核心知识
一、WPF动画基础 1、动画本质 通过随时间改变依赖属性值实现视觉效果(如位置、透明度、颜色等)。 依赖属性必须支持 DependencyProperty,且需是可动画的(如 Double, Color, Point 等)。 2、动画三要素 起始值 (Fr…...

HTML前端手册
HTML前端手册 记录前端框架在使用过程中遇到的各种问题和解决方案,供后续快速进行手册翻阅使用 文章目录 HTML前端手册1-前端框架1-TypeScript框架2-CSS框架 2-前端Demo1-Html常用代码 2-知云接力3-Live2D平面动画 3-前端运维1-NPM版本管理 1-前端框架 1-TypeScrip…...

风控模型算法面试题集结
特征处理 1. 特征工程的一般步骤什么?什么是特征迭代 特征工程一般包含: 数据获取,分析数据的可用性(覆盖率,准确率,获取容易程度)数据探索,分析数据业务含义,对特征有一个大致了解,同时进行数据质量校验,包含缺失值、异常值和一致性等;特征处理,包含数据处理和…...
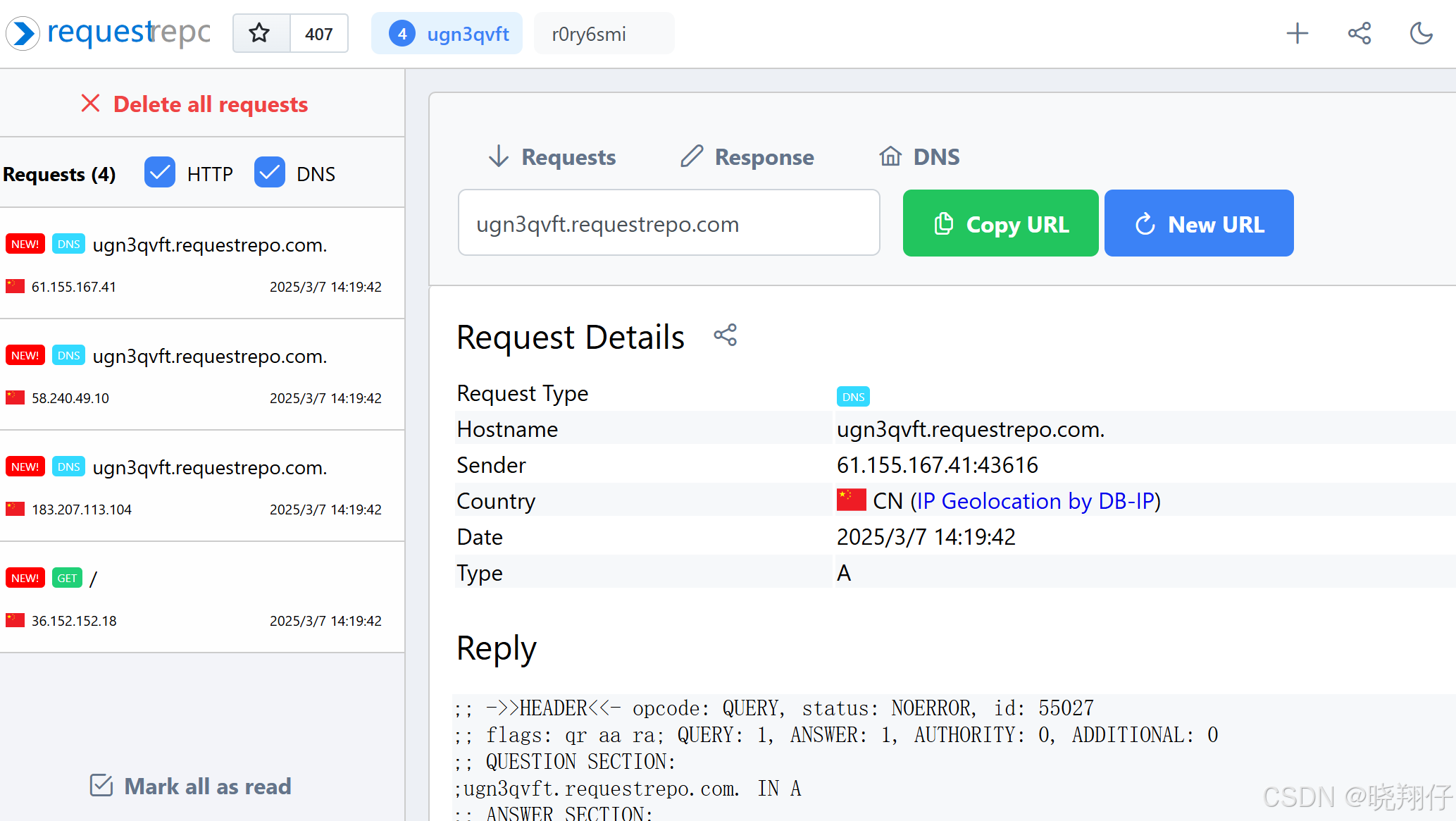
利用 requestrepo 工具验证 XML外部实体注入漏洞
1. 前言 在数字化浪潮席卷的当下,网络安全的重要性愈发凸显。应用程序在便捷生活与工作的同时,也可能暗藏安全风险。XXE(XML外部实体)漏洞作为其中的典型代表,攻击者一旦利用它,便能窃取敏感信息、掌控服务…...
引领变革!北京爱悦诗科技有限公司荣获“GAS消费电子科创奖-产品创新奖”!
在2025年“GAS消费电子科创奖”评选中,北京爱悦诗科技有限公司提交的“aigo爱国者GS06”,在技术创新性、设计创新性、工艺创新性、智能化创新性及原创性五大维度均获得评委的高度认可,荣获“产品创新奖”。 这一奖项不仅是对爱悦诗在消费电子…...

MySQL JOIN 与子查询深度对比:原理、性能陷阱与优化策略
1. 基础概念:JOIN 与子查询的本质区别 1.1 JOIN 的核心作用 目标:直接关联两个表的行,通过匹配条件(如 ON 或 USING)合并数据。典型场景:需要同时获取两个表的字段(如 SELECT A.col, B.col FROM A JOIN B)。执行逻辑: 数据库一次性处理两表关系,优化器可能选择 Nest…...
稀疏注意力:打破Transformer计算瓶颈,实现高效长序列建模
引言:Transformer的辉煌与困境 近年来,Transformer凭借其强大的自注意力机制(Self-Attention),在自然语言处理、图像识别等领域大放异彩。然而,传统自注意力机制要求模型计算输入序列中所有位置对之间的关联…...

PTA 7-8 哈利·波特的考试
题目描述 哈利波特要考试了,他需要你的帮助。这门课学的是用魔咒将一种动物变成另一种动物的本事。例如将猫变成老鼠的魔咒是 haha,将老鼠变成鱼的魔咒是 hehe 等等。反方向变化的魔咒就是简单地将原来的魔咒倒过来念,例如 ahah 可以将老鼠变…...

纯html文件实现目录和文档关联
目录结构 效果图 代码 <!DOCTYPE html> <html lang"en"><head><meta charset"UTF-8"><title>项目结题报告</title><style lang"scss">::-webkit-scrollbar {width: 6px;height: 6px;}::-webkit-scro…...

共绘智慧升级,看永洪科技助力由由集团起航智慧征途
在数字化洪流汹涌澎湃的当下,企业如何乘风破浪,把握转型升级的黄金机遇,已成为所有企业必须直面的时代命题。由由集团,作为房地产的领航者,始终以前瞻视野引领变革,坚决拥抱数字化浪潮,携手数字…...

如何搭建个人静态住宅IP:从零开始
你好!今天我们将一起探索如何从头开始搭建个人静态住宅IP。无论您是为了远程办公、在线教育还是游戏加速,静态住宅IP都能带给您更稳定的网络体验。 一、准备阶段 1. 明确需求 首先,您需要清楚自己为什么需要静态住宅IP。可能是为了实现远程…...

《打造视频同步字幕播放网页:从0到1的技术指南》
《打造视频同步字幕播放网页:从0到1的技术指南》 为什么要制作视频同步字幕播放网页 在数字化信息飞速传播的当下,视频已然成为内容输出与获取的核心载体,其在教育、娱乐、宣传推广等诸多领域发挥着举足轻重的作用 。制作一个视频同步字幕播…...

自学嵌入式第27天------TCP和UDP,URL爬虫
1. TCP和UDP区别 **TCP(传输控制协议)和UDP(用户数据报协议)**是两种主要的传输层协议,它们在数据传输方式上有显著区别: 连接性: TCP是面向连接的协议,通信前需通过三次握手建立连…...

C++ 学生成绩管理系统
一、项目背景与核心需求 成绩管理系统是高校教学管理的重要工具,本系统采用C++面向对象编程实现,主要功能模块包括: 学生信息管理(学号/姓名/3门课程成绩) 成绩增删改查(CRUD)操作 数据持久化存储 统计分析与报表生成 用户友好交互界面 二、系统架构设计 1. 类结构设计 …...

Spring Cloud Alibaba 实战:轻松实现 Nacos 服务发现与动态配置管理
1. Nacos 介绍 1.1 什么是 Nacos? Nacos(Naming and Configuration Service)是阿里巴巴开源的一个服务注册中心和配置管理中心。它支持动态服务发现、配置管理和服务治理,适用于微服务架构,尤其是基于 Spring Cloud …...

关于sqlalchemy的使用
关于sqlalchemy的使用 说明一、sqlachemy总体使用思路二、安装与创建库、连结库三、创建表、增加数据四、查询记录五、更新或删除六、关联表定义 说明 本教程所需软件及库python3.10、sqlalchemy安装与创建库、连结库创建表、增加数据查询记录 一、sqlachemy总体使用思路 在…...

三维建模与视频融合(3D-Video Integration)技术初探。
三维建模与视频融合(3D-Video Integration)是一种将虚拟三维模型无缝嵌入实拍视频场景的技术,广泛应用于影视特效、增强现实(AR)、游戏开发、广告制作 、视频监控 等领域。 一、技术核心流程 三维建模与动画 使用工具…...

springboot3 RestClient、HTTP 客户端区别
1 RestClient使用 RestClient 是 Spring 6.1 M2 中引入的同步 HTTP 客户端,它取代了 RestTemplate。同步 HTTP 客户端以阻塞方式发送和接收 HTTP 请求和响应,这意味着它会等待每个请求完成后才继续下一个请求。本文将带你了解 RestClient 的功能以及它与…...

分布式存储学习——HBase概述
1.1 HBase概述 1.1.1 理解大数据背景 1.1.2 HBase是什么 1.1.3 HBase与Hadoop的关系 1.1.4 HBase的核心功能模块 1.1.5 HBase的应用场景和经典案例 1.1.6 小结 本文参考于学校《HBase应用于开发》教材 1.1 HBase概述 本节将介绍大数据背景和HBase的基本概念,…...

LLM run
lmstudio lmstudio ollama ollama N 卡使用自带UI gpu加速推理 ,选择满足条件的, ds模型选择列表 https://ollama.com/library/deepseek-r1 a卡当前支持的显卡型号 I卡 gpu加速配置 2025.3 intel Official project optimization https://www.modelscope.cn/m…...

HttpServletRequest、ServerHttpRequest 和 ServerWebRequest作用详解
1、HttpServletRequest 所属框架:Java Servlet API(基于阻塞式 I/O)。 使用场景:传统的 Servlet 应用(如 Spring MVC的Tomcat、常用的容器等等)。 作用:表示客户端的 HTTP 请求。 常用方法&a…...

【大模型基础_毛玉仁】2.2 大语言模型架构概览
【大模型基础_毛玉仁】2.2 大语言模型架构概览 2.2 大语言模型架构概览2.2.1 主流模型架构的类别1)Encoder-only 架构2)Encoder-Decoder 架构3)Decoder-only 架构 2.2.2 模型架构的功能对比1)注意力矩阵2)适用任务 2.2…...

微信小程序点击按钮,将图片下载到本地
前言: 最近在公司完成一个小程序的时候需要实现一个功能:点击按钮获取用户相册权限,将图片下载到用户本地相册,经过了好几次的尝试最终算是实现了。将总结的经验在这里分享给小伙伴们。 实现方式: //.wxml文件 <…...