MPU6050模块详解:从原理到STM32驱动指南(上) | 零基础入门STM32第八十九步
| 主题 | 内容 | 教学目的/扩展视频 |
|---|---|---|
| 加速度传感器 | 电路连接。手册分析。驱动程序,读出数据。 | 能读出3轴数据。 |
师从洋桃电子,杜洋老师
📑文章目录
- 一、MPU6050模块介绍
- 1.1 核心特性
- 1.2 模块化优势
- 二、MPU6050模块连接方法
- 2.1 硬件连接
- 2.2 电源注意事项
- 三、六轴示意图与轴向定义
- 3.1 坐标系定义
- 3.2 数据输出规则
- 四、MPU6050器件地址解析
- 4.1 地址冲突问题
- 4.2 地址配置
- 五、MPU6050核心特性详解
- 5.1 关键性能参数
- 5.2 DMP功能应用
- 5.3 中断功能
- 六、相关资源
一、MPU6050模块介绍
1.1 核心特性
MPU6050 是全球首款整合 3轴MEMS陀螺仪 和 3轴MEMS加速度计 的6轴运动处理传感器。其核心亮点包括:
- 高精度测量:陀螺仪量程可配置(±250°/s至±2000°/s),加速度计量程(±2g至±16g),16位ADC确保数据精度。
- 内置DMP引擎:数字运动处理器(DMP)可直接输出融合后的姿态数据(四元数、欧拉角等),减轻主控计算负担。
- 低功耗设计:支持多种省电模式,加速度计最低功耗仅40μA@10Hz。
- 扩展性强:支持通过I2C接口外接磁力计,实现9轴数据融合。
1.2 模块化优势
MPU6050芯片封装极小(4×4×0.9mm),直接焊接难度高,因此通常使用模块化设计。模块集成了:
- 电平转换电路(兼容3.3V/5V系统)
- 滤波电容和稳压电路
- 清晰的引脚标识(如SCL、SDA、INT等)
二、MPU6050模块连接方法
2.1 硬件连接
以STM32F1系列为例,典型接线如下:
| MPU6050模块引脚 | STM32引脚 | 功能说明 |
|---|---|---|
| VCC | 3.3V/5V | 电源正极 |
| GND | GND | 电源地 |
| SCL | PB6 | I2C时钟线 |
| SDA | PB7 | I2C数据线 |
| INT | 任意GPIO | 中断信号(可选) |

2.2 电源注意事项
- VCC:支持2.5V~3.3V(典型3.3V),需确保电源稳定。
- VLOGIC:若模块未集成电平转换,需外接1.8V逻辑电平(部分模块已内置)。
三、六轴示意图与轴向定义
3.1 坐标系定义
MPU6050采用右手坐标系,轴向定义如下:
- X轴:平行于芯片长边,指向右侧。
- Y轴:平行于芯片短边,指向前方。
- Z轴:垂直于芯片平面,向上为正。

3.2 数据输出规则
- 加速度计:测量线性加速度,单位为
g(重力加速度)。 - 陀螺仪:测量角速度,单位为
°/s。 - 数据符号:正负号表示方向(例如,X轴正方向加速度为正值)。
四、MPU6050器件地址解析
4.1 地址冲突问题
MPU6050的I2C地址在数据手册中标注为 0x68(7位地址),但在STM32硬件I2C驱动中需使用 0xD0(8位写地址)。原因如下:
- 7位地址:
0x68(二进制1101000)。 - 8位地址:左移一位后,补R/W位(写模式为0),即
0xD0(二进制11010000)。
4.2 地址配置
- ADO引脚:接地时地址为
0x68,接VCC时地址为0x69。 - 代码示例:
#define MPU6050_ADDR 0xD0 // 8位写地址
五、MPU6050核心特性详解
5.1 关键性能参数
| 参数 | 陀螺仪 | 加速度计 |
|---|---|---|
| 量程范围 | ±250°/s ~ ±2000°/s | ±2g ~ ±16g |
| ADC分辨率 | 16位 | 16位 |
| 输出数据速率 | 最高8kHz | 最高1kHz |
| 功耗 | 5mA(工作) / 5μA(待机) | 500μA(工作) |
5.2 DMP功能应用
通过DMP可直接获取姿态数据,无需手动融合传感器数据:
// 示例:读取四元数
int16_t q[4];
MPU6050_Read(MPU6050_QUATERNION_REG, (uint8_t*)q, 8);
5.3 中断功能
支持多种中断触发条件(数据就绪、自由落体检测等),配置寄存器即可启用:
// 启用数据就绪中断
MPU6050_Write(MPU6050_INT_ENABLE_REG, 0x01);
六、相关资源
[1] 洋桃电子B站课程-STM32入门100步
[2] STM32官方文档手册
[3] STM32F103固件函数库用户手册(中文)
[4] MPU6050(加速度传感器)数据手册
[5] MPU6050原始数据显示程序
[6] MPU6050原理与驱动.pptx
💬 技术讨论(请在评论区留言~)
📌 下期预告:下一期将探讨MPU6050驱动程序分析,欢迎持续关注!
点击查阅🔍往期【STM32专栏】文章
版权声明:本文采用[CC BY-NC-SA 4.0]协议,转载请注明来源
实测开发版:洋桃1号开发版(基于STM32F103C8T6)
更新日志:
- v1.0 初始版本(2025-03-30)
相关文章:
MPU6050模块详解:从原理到STM32驱动指南(上) | 零基础入门STM32第八十九步
主题内容教学目的/扩展视频加速度传感器电路连接。手册分析。驱动程序,读出数据。能读出3轴数据。 师从洋桃电子,杜洋老师 📑文章目录 一、MPU6050模块介绍1.1 核心特性1.2 模块化优势 二、MPU6050模块连接方法2.1 硬件连接2.2 电源注意事项 …...

STM32 MODBUS-RTU主从站库移植
代码地址 STM32MODBUSRTU: stm32上的modbus工程 从站 FreeModbus是一个开源的Modbus通信协议栈实现。它允许开发者在各种平台上轻松地实现Modbus通信功能,包括串口和以太网。FreeMODBUS提供了用于从设备和主站通信的功能,支持Modbus RTU和Modbus TCP协…...

架构师面试(二十二):TCP 协议
问题 今天我们聊一个非常常见的面试题目,不管前端还是后端,也不管做的是上层业务还是底层框架,更不管技术方向是运维还是架构,都可以思考和参与一下哈! TCP协议无处不在,我们知道 TCP 是基于连接的端到端…...

程序自动化填写网页表单数据
1 背景介绍 如何让程序自动化填写网页表单数据,特别是涉及到批量数据情况时,可以减少人力。下面是涉及到的一些场景,都可以通过相关自动化程序实现。 场景1 场景1,领导安排,通过相关省、市、县、乡镇数据࿰…...
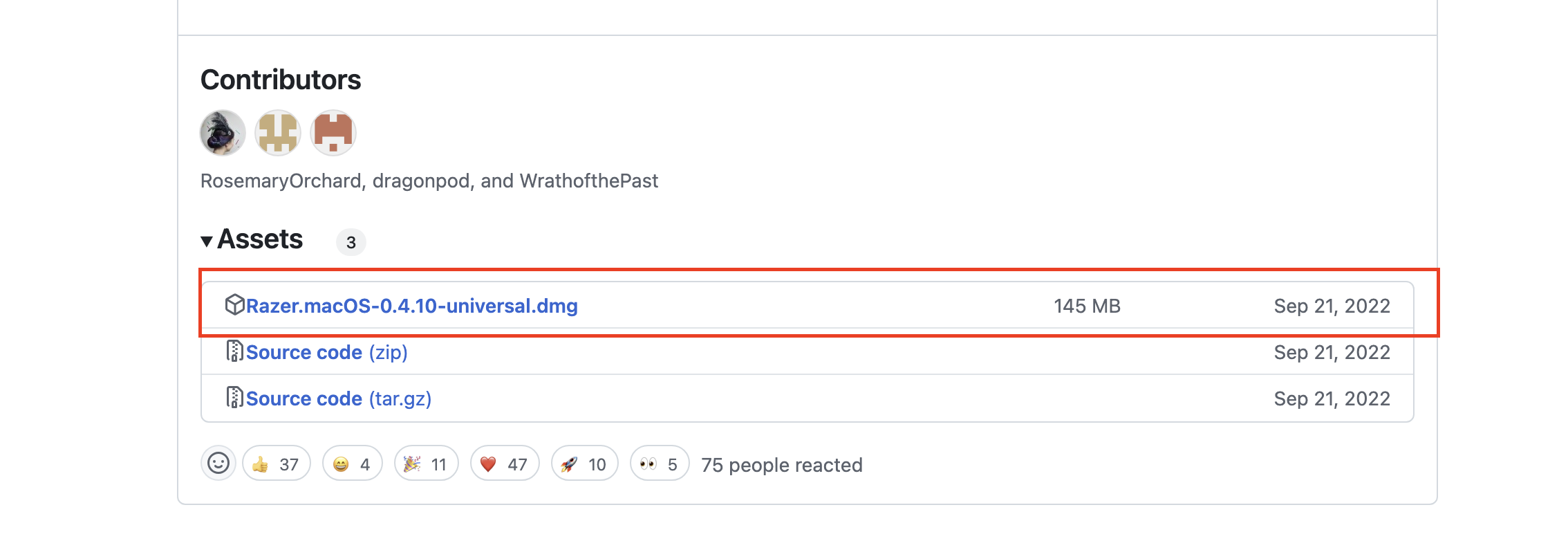
Razer macOS v0.4.10快速安装
链接点这里下载最新的 .dmg 文件。将下载的 .dmg 映像文件拖入 应用程序 文件夹中。若首次打开时出现安全警告【什么扔到废纸篓】,这时候点击 Mac 的“系统偏好设置”-> “安全性与隐私”-> “通用”,然后点击底部的 “打开”。【或者仍然打开】 对…...

常用正则表达式-MAC 地址
MAC地址的定义 物理地址(通常称为 MAC地址,Media Access Control Address)是网络设备在数据链路层(如以太网、Wi-Fi)的唯一标识符。它由设备的网络接口卡(NIC)固化在硬件中,用于在局…...
如何自动化同义词并使用我们的 Synonyms API 进行上传
作者:来自 Elastic Andre Luiz 了解如何使用 LLM 来自动识别和生成同义词, 使术语可以通过程序方式加载到 Elasticsearch 同义词 API 中。 提高搜索结果的质量对于提供高效的用户体验至关重要。优化搜索的一种方法是通过同义词自动扩展查询词。这样可以更…...

一. 相机模组摆放原理
1. 背景: 相机开发时经常出现因模组摆放问题,导致相机成像方向异常。轻则修改软件、模组返工, 重则重新修改堆叠,影响相机调试进度。因此,设计一个模型实现模组摆放纠错很有必要。 2. 原理: 2.1 口诀&am…...

【C++游戏引擎开发】《线性代数》(1):环境配置与基础矩阵类设计
一、开发环境配置 1.1 启用C 20 在VS2022中新建项目后右键项目 1.2 启用增强指令集 1.3 安装Google Test vcpkg安装使用指南 vcpkg install gtest:x64-windows# 集成到系统目录,只需要执行一次,后续安装包之后不需要再次执行 vcpkg integrate inst…...

sqli-labs靶场 less 8
文章目录 sqli-labs靶场less 8 布尔盲注 sqli-labs靶场 每道题都从以下模板讲解,并且每个步骤都有图片,清晰明了,便于复盘。 sql注入的基本步骤 注入点注入类型 字符型:判断闭合方式 (‘、"、’、“”…...

基于大模型的知识图谱搜索的五大核心优势
在传统知识图谱与生成式AI融合的浪潮中,基于大模型的知识图谱搜索正成为新一代智能检索的标杆技术,飞速灵燕智能体平台就使用了该技术,其核心优势体现在: 1. 语义穿透力升级 突破关键词匹配局限,通过大模型的深层语义…...
【MySQL】从零开始:掌握MySQL数据库的核心概念(五)
由于我的无知,我对生存方式只有一个非常普通的信条:不许后悔。 前言 这是我自己学习mysql数据库的第五篇博客总结。后期我会继续把mysql数据库学习笔记开源至博客上。 上一期笔记是关于mysql数据库的增删查改,没看的同学可以过去看看…...

人生感悟8
前言 今天,在这里跟各位聊一些看法。为什么现在的歌曲和影视剧越来越没有艺术性和内涵?为什么现在读书的人越来越少? 正文 这里我先声明一点,就像C或者是Java创建variable or constant一样,本文所述内容只限于个人观…...

Java版Manus实现来了,Spring AI Alibaba发布开源OpenManus实现
此次官方发布的 Spring AI Alibaba OpenManus 实现,包含完整的多智能体任务规划、思考与执行流程,可以让开发者体验 Java 版本的多智能体效果。它能够根据用户的问题进行分析,操作浏览器,执行代码等来完成复杂任务等。 项目源码及…...

鸿蒙UI开发
鸿蒙UI开发 本文旨在分享一些鸿蒙UI布局开发上的一些建议,特别是对屏幕宽高比发生变化时的应对思路和好的实践。 折叠屏适配 一般情况(自适应布局/响应式布局) 1.自适应布局 1.1自适应拉伸 左右组件定宽 TypeScript //左右定宽 Row() { …...

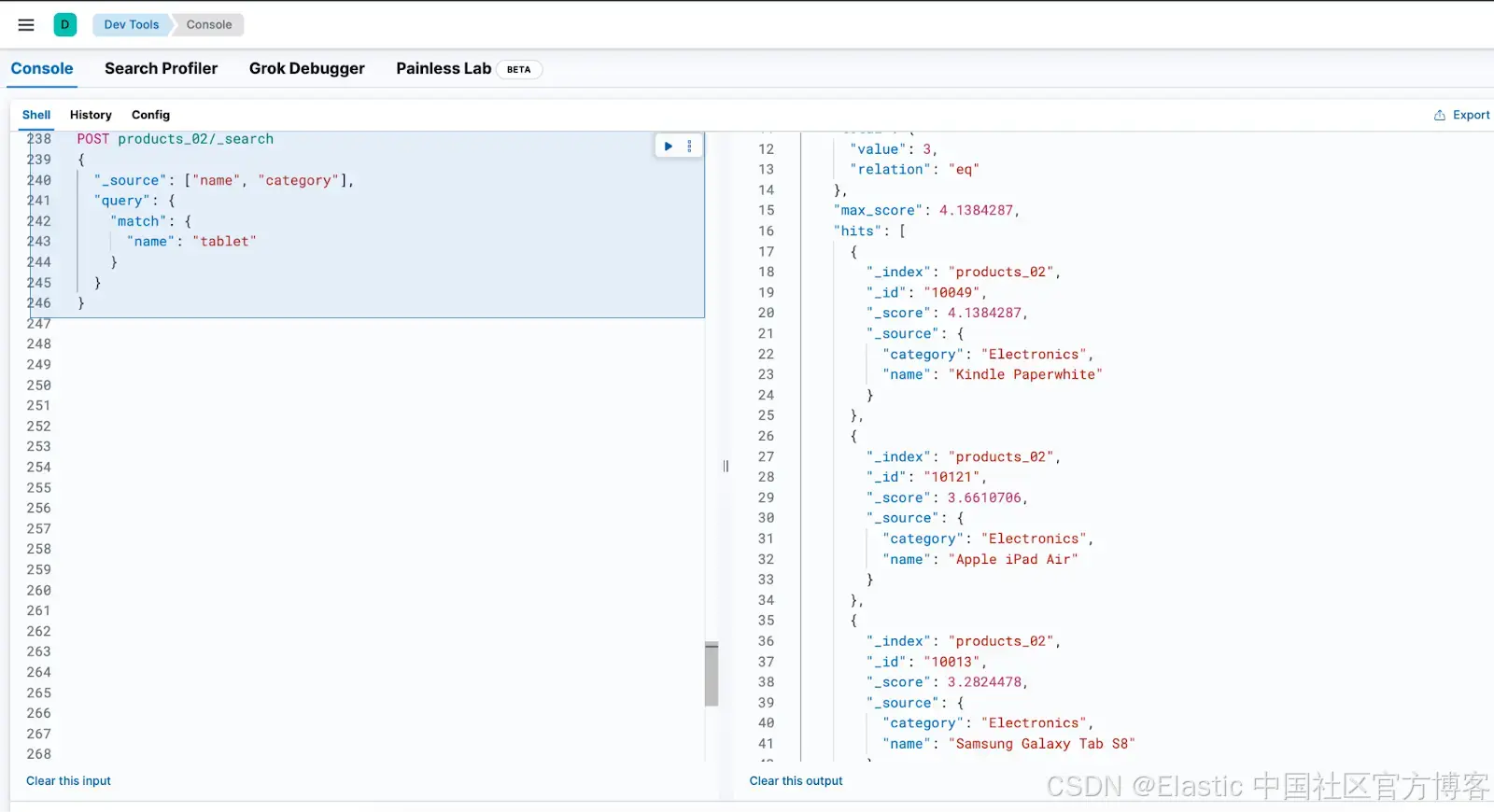
Elasticsearch-实战案例
一、没有使用Elasticsearch的查询速度698ms 1.数据库模糊查询不走索引,在数据量较大的时候,查询性能很差。需要注意的是,数据库模糊查询随着表数据量的增多,查询性能的下降会非常明显,而搜索引擎的性能则不会随着数据增…...

#基于Django实现机器学习医学指标概率预测网站
基于Django实现机器学习医学指标概率预测网站 一、引言 在当今数字化医疗的大背景下,利用机器学习模型结合Web应用进行医学指标的概率预测具有重要的实际意义。本文将详细介绍一个基于Django框架构建的医学指标概率预测系统,通过结合随机森林模型&…...

【bug】OPENCV和FPGA的版本对应关系
如果opencv和FPGA的版本不对应,则会出现如下warning /usr/bin/ld: warning: libavcodec.so.57, needed by /usr/lib/gcc/aarch64-linux-gnu/7/../../../aarch64-linux-gnu/libopencv_videoio.so, may conflict with libavcodec.so.58 /usr/bin/ld: warning: libavformat.so.5…...

IP数据报报文格式
一 概述 IP数据报由两部分组成:首部数据部分。首部的前一部分是固定长度,一共20字节大小,是所有IP数据报文必须具有的;固定部分后面是一些可选字段,其长度是可变的。 二 首部固定部分各字段意义 (1&…...
)
一键实现:谷歌表单转word(formtoword)
一键将 Google Forms 转换为 Word,最简单的方法 有些繁琐的工作让人倍感挫败,明明 应该 可以自动化。你精心制作了一份 Google Forms,收集了数据,现在需要在 Word 文档中分享其结构或内容。于是,你只能手动复制粘贴问…...

openEuler24.03 LTS下安装Kafka集群
目录 前提条件 Kafka集群规划 下载Kafka 解压 设置环境变量 配置Kafka 分发到其他机器 分发安装文件 分发环境变量 启动Kafka 测试Kafka 关闭Kafka 集群启停脚本 问题及解决 前提条件 安装好ZooKeeper集群,可参考:openEuler24.03 LTS下安…...

qt QQuaternion详解
1. 概述 QQuaternion 是 Qt 中用于表示三维空间中旋转的四元数类。它包含一个标量部分和一个三维向量部分,可以用来表示旋转操作。四元数在计算机图形学中广泛用于平滑的旋转和插值。 2. 重要方法 默认构造函数 QQuaternion::QQuaternion(); // 构造单位四元数 (1…...

epoch、batch、batch size、step、iteration深度学习名词含义详细介绍
卷积神经网络训练中的三个核心概念:Epoch、Batch Size 和迭代次数 在深度学习中,理解一些基本的术语非常重要,这些术语对模型的训练过程、效率以及最终性能都有很大影响。以下是一些常见术语的含义介绍: 1. Epoch(周…...

pytorch中不同的mask方法:masked_fill, masked_select, masked_scatter
在 PyTorch 中,masked_fill、masked_select 和 masked_scatter 是三种常用的掩码(mask)操作方法,它们通过布尔类型的掩码张量(mask)对原始张量进行条件筛选或修改。以下是它们的详细解释和对比:…...

TCP 协议算法解析 | RTT / 滑动窗口 / 拥塞控制
注:本文为 “TCP 协议算法解析” 相关文章合辑。 略作重排,未去重。 如有内容异常,请看原文。 TCP 的那些事儿(上) 2014 年 05 月 28 日 陈皓 TCP 是一个极为复杂的协议,因为它需要解决众多问题&#x…...

卷积神经网络 - ResNet(残差网络)
残差网络(Residual Network,ResNet)通过给非线性的卷积层增加直连边 (Shortcut Connection)(也称为残差连接(Residual Connection))的方式来提高信息的传播效率。 这是一种特殊的深度神经网络结构,由 Kaiming He 等人在 2015 年提出,目的是解…...

GreenPlum学习
简介 Greenplum是一个面向数据仓库应用的关系型数据库,因为有良好的体系结构,所以在数据存储、高并发、高可用、线性扩展、反应速度、易用性和性价比等方面有非常明显的优势。Greenplum是一种基于PostgreSQL的分布式数据库,其采用sharednothi…...
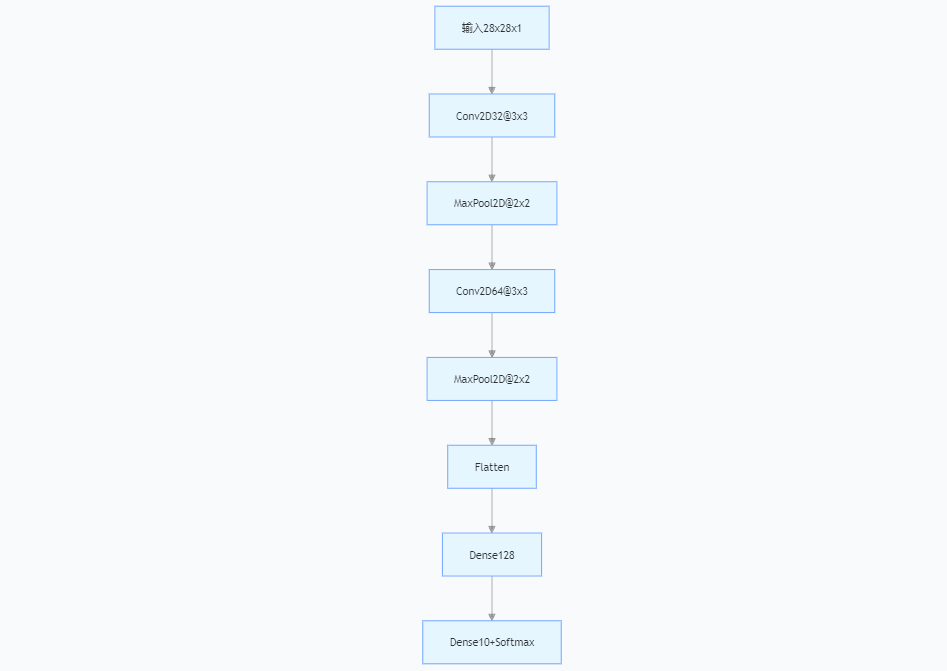
传统神经网络、CNN与RNN
在网络上找了很多关于深度学习的资料,也总结了一点小心得,于是就有了下面这篇文章。这里内容较为简单,适合初学者查看,所以大佬看到这里就可以走了。 话不多说,上图 #mermaid-svg-Z3k5YhiQ2o5AnvZE {font-family:&quo…...

无人机,雷达定点飞行时,位置发散,位置很飘,原因分析
参考: 无人车传感器 IMU与GPS数据融合进行定位机制_gps imu 组合定位原始数-CSDN博客 我的无人机使用雷达定位,位置模式很飘 雷达的更新频率也是10HZ, 而px飞控的频率是100HZ,没有对两者之间的频率差异做出处理 所以才导致无人…...

【Linux探索学习】第二十九弹——线程概念:Linux线程的基本概念与线程控制详解
Linux学习笔记: https://blog.csdn.net/2301_80220607/category_12805278.html?spm1001.2014.3001.5482 前言: 在现代操作系统中,线程是程序执行流的最小单元。与进程相比,线程更加轻量级,创建和销毁的开销更小&…...