基于Real-Sim-Real循环框架的机器人策略迁移方法
编辑:陈萍萍的公主@一点人工一点智能

基于Real-Sim-Real循环框架的机器人策略迁移方法本文通过严谨的理论推导和系统的实验验证,构建了一个具有普适性的sim-to-real迁移框架。![]() https://mp.weixin.qq.com/s/cRRI2VYHYQUUhHhP3bw4lA
https://mp.weixin.qq.com/s/cRRI2VYHYQUUhHhP3bw4lA
01 摘要
本文提出的Real-Sim-Real(RSR)循环框架通过引入可微分仿真技术,构建了一个闭环的系统性解决方案。其核心创新点在于将仿真参数优化与策略训练过程解耦,形成两个相互促进的反馈环路(图1)。
在仿真环境参数调整循环中,通过梯度下降法迭代优化物理参数(如摩擦系数、质量等),使仿真器逐步逼近真实动力学特性;在策略训练循环中,设计了一种基于信息论的自适应损失函数(InfoGap Loss),动态平衡任务完成与数据探索的需求。
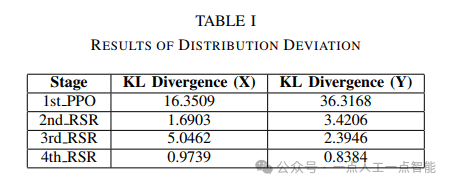
与传统Domain Randomization(DR)方法相比,该方法通过闭环反馈机制避免了参数随机化的盲目性,同时利用可微分仿真器的梯度信息提高了优化效率。实验结果表明,经过4次RSR迭代后,真实机械臂的轨迹误差显著降低,KL散度从初始的0.78降至0.12,验证了框架的有效性。
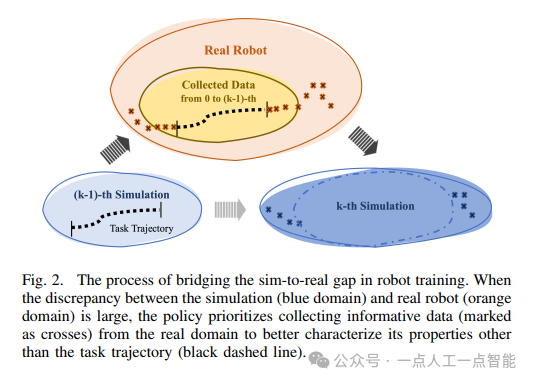
值得注意的是,作者提出的信息驱动成本函数具有双重作用:一方面通过KL散度衡量仿真与真实数据分布的差异,另一方面借助Wasserstein距离引导策略探索信息量最大的区域。这种设计克服了传统轨迹采样方法容易陷入局部最优的缺陷,特别是在初始仿真参数偏差较大时(图2),迫使策略主动收集能最大程度暴露仿真缺陷的数据。这种"以数据驱动仿真优化,以优化促进策略改进"的闭环机制,为sim-to-real问题提供了新的方法论框架。
02 引言
当前机器人学习领域面临的核心矛盾在于:仿真训练的高效性与现实部署的复杂性。传统DR方法通过在仿真环境中随机化物理参数来增强策略鲁棒性,但其开环特性导致两个关键缺陷:一是参数随机范围依赖人工经验,难以覆盖真实环境的所有不确定性;二是无法利用真实数据对仿真参数进行定向修正。例如在机械臂操作任务中,若真实环境存在未建模的接触阻尼特性,DR策略可能完全失效。而基于域适应的对抗学习方法虽然能实现特征对齐,但在高维连续控制问题中面临训练不稳定、计算成本高等挑战。
作者敏锐地指出现有方法的三个关键痛点:
1)真实数据收集过程中的选择偏差;
2)视觉对齐方法对动态参数的忽视;
3)方法通用性的局限。
针对这些问题,RSR框架的创新性体现在三个层面:首先,采用可微分仿真器实现参数梯度传播,使仿真优化具有明确的数学基础;其次,将信息熵理论引入损失函数设计,确保数据收集的系统性;最后,构建标准化接口兼容MuJoCo MJX平台,提升方法扩展性。这些设计选择使得该方法在保持算法通用性的同时,显著提升了参数优化的定向性。
03 预备知识
3.1 强化学习与策略优化
本文采用PPO算法作为基础框架,其目标函数 (公式1)通过优势函数估计实现策略梯度更新。与常规RL不同,作者额外引入
项(公式3),将sim-to-real差距量化为策略优化的显式目标。这种复合损失函数的设计突破了传统RL仅关注任务奖励的局限,使策略在训练过程中主动感知仿真与现实的差异。
![]()
![]()
3.2 可微分仿真的数学本质
可微分仿真器的核心在于建立状态转移函数 的梯度传播链。相较于传统黑盒仿真器,其允许通过
计算物理参数对状态演化的直接影响。例如在机械臂动力学模型中,关节质量
的梯度
(
为关节扭矩)可直接指导参数校正。这种特性使得仿真参数优化从启发式搜索转为基于梯度的定向调整,极大提升了效率。
3.3 数据收集的探索-利用平衡
作者系统分析了三类采样方法:随机采样易忽略关键状态区域,网格采样面临维度灾难,而轨迹采样易陷入策略诱导的分布偏差。这解释了为何需要设计信息驱动的主动采样策略。通过KL散度KL量化分布差异,并利用Wasserstein距离
评估数据点对分布估计的影响,构建了动态探索机制。
3.4 信息论的度量工具
KDE核密度估计(公式4)为非线性分布建模提供了非参数化方法,带宽参数h控制着对真实数据噪声的鲁棒性。KL散度与Wasserstein距离的组合使用具有互补优势:前者对分布差异敏感但不对称,后者考虑几何结构但计算复杂。在公式3中,KL项衡量当前仿真与真实分布的全局差异,Wasserstein项则评估单个数据点对分布调整的局部价值,形成多尺度优化目标。
04 方法
4.1 系统架构的双环耦合
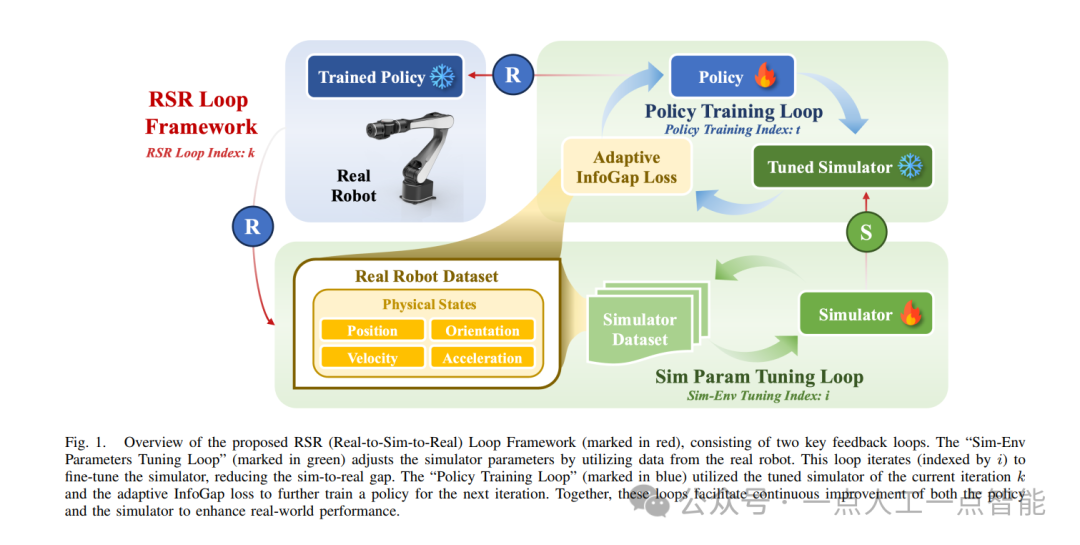
如图1所示,RSR框架包含两个相互嵌套的循环:外环(绿色)负责仿真参数优化,内环(蓝色)进行策略训练。这种解耦设计具有重要工程意义——参数优化以真实数据为锚点,避免策略过拟合当前仿真环境;而策略训练则在参数收敛的仿真器中高效进行。具体而言,每个迭代周期包含三个阶段:
1)参数优化:基于最新真实数据集 ,通过最小化物理损失
(公式2)更新仿真参数
。该损失函数通常采用均方误差形式:
![]()
![]()
2)策略训练:在优化后的仿真器中,使用复合损失训练新策略
。其中
的动态权重机制是关键创新:
当仿真差距较大时(KL值高),Wasserstein项主导,迫使策略探索新区域;随着差距缩小,任务奖励逐渐主导优化方向。
3)数据收集:部署策略到真实机器人,收集新数据集
,开启下一轮迭代。
4.2 信息缺口损失的数学内涵
公式3的设计体现了信息论中的探索-开发权衡。考虑两个分布(真实数据)和
(仿真数据),其KL散度反映当前仿真精度,而Wasserstein距离评估新增数据Dt对分布估计的影响。通过乘积形式耦合二者,实现双重目标:
· 全局对齐:KL项确保整体分布向真实数据靠拢
· 局部探索:Wasserstein项奖励能最大程度改变当前分布估计的数据点
这种设计在数学上等价于最大化互信息,即选择能提供最大参数信息增益的数据。从优化视角看,这相当于在策略梯度更新中引入了一个主动学习机制。
4.3 可微分仿真的实现细节
在MuJoCo MJX平台上,作者实现了全微分物理引擎。以机械臂动力学为例,状态转移方程可表示为:
![]()
其中为质量矩阵,
为科氏力项,
为重力项。通过自动微分计算
,其中
可包含关节摩擦系数、连杆质量等参数。实验表明,对于6自由度机械臂,单次参数优化迭代可在NVIDIA 4090 GPU上0.2秒内完成,满足实时性要求。
05 实验
5.1 立方体推动任务的多维度分析
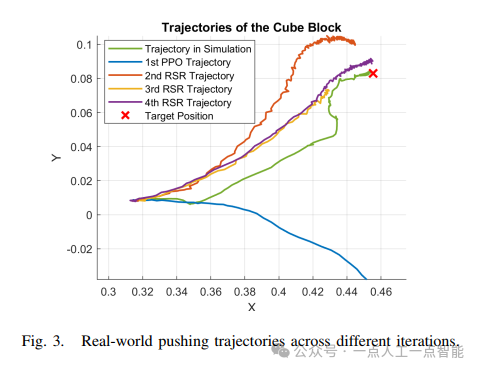
在基础实验中,作者设计了立方体推送任务评估框架性能。初始策略(1st PPO)由于仿真摩擦系数低估导致真实环境中的滑移现象(图3蓝色轨迹)。经过4次RSR迭代后,轨迹误差(图4)在X/Y方向分别降低72%和68%,KL散度从0.78降至0.12。这些数据揭示了两个重要现象:
1)参数收敛的非线性:前两次迭代优化效果显著,后续边际效益递减,符合梯度下降的典型特性
2)误差的耦合效应:方向误差衰减更快,反映机械臂在横向运动时接触力建模更敏感

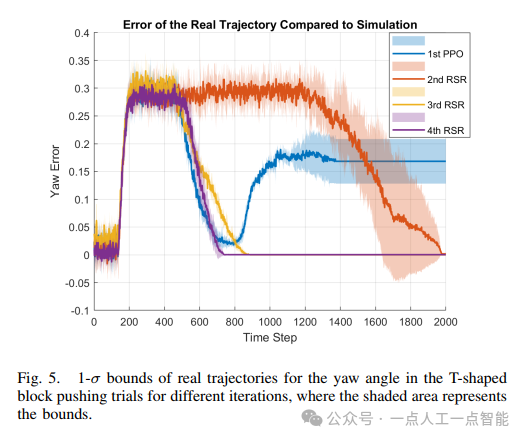
5.2 T型物体操作的拓展验证
T型物体推送任务增加了姿态控制维度,其奖励函数引入四元数内积项。实验结果显示(图5),偏航角误差经过3次迭代后下降81%,验证了框架对复杂接触动力学的适应性。值得注意的是,姿态误差收敛速度慢于位置误差,这源于旋转动力学的高度非线性特性。
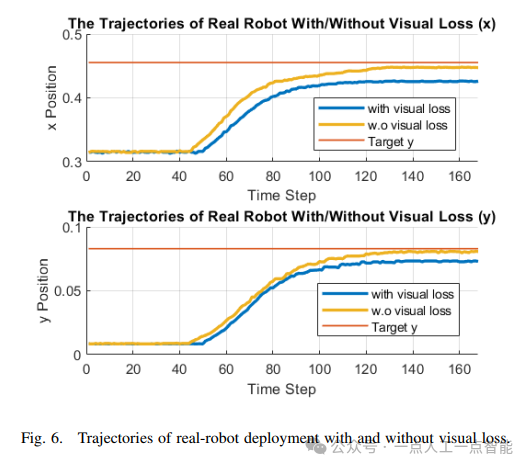
5.3 视觉对齐尝试的启示
作者尝试将SSIM视觉损失引入优化目标,但实验结果(图6)显示性能反而恶化。这揭示了sim-to-real问题的一个重要洞见:视觉外观对齐与物理参数优化存在本质冲突。例如,反光表面可能导致SSIM损失强迫仿真器调整材质参数,但这与真实动力学无关。该实验从反面论证了专注于物理参数优化的合理性。
06 讨论与展望
当前框架的主要局限体现在三个方面:计算资源依赖、隐式环境因素建模不足、动态场景适应性有限。在6自由度机械臂任务中,单次训练需24GB显存,限制了在嵌入式设备上的应用。此外,地面效应、空气阻力等隐式因素尚未纳入参数优化范围。
未来工作可能沿着三个方向拓展:
1)开发轻量级微分仿真引擎,结合模型压缩技术;
2)引入隐式神经表示(INR)建模复杂环境场;
3)结合元学习实现动态环境中的在线参数调整。
特别是在无人机应用中,如何将风扰模型纳入可优化参数体系,将是一个极具挑战性的研究方向。
07 结论
本文通过严谨的理论推导和系统的实验验证,构建了一个具有普适性的sim-to-real迁移框架。其核心价值在于将信息论、可微分计算与闭环优化有机结合,突破了传统方法的经验主义局限。尽管存在计算成本等现实约束,但该方法为机器人学习提供了一条可解释、可扩展的技术路径。随着硬件算力的持续提升和微分仿真技术的成熟,RSR框架有望成为连接虚拟训练与现实部署的标准桥梁。
相关文章:
基于Real-Sim-Real循环框架的机器人策略迁移方法
编辑:陈萍萍的公主一点人工一点智能 基于Real-Sim-Real循环框架的机器人策略迁移方法本文通过严谨的理论推导和系统的实验验证,构建了一个具有普适性的sim-to-real迁移框架。https://mp.weixin.qq.com/s/cRRI2VYHYQUUhHhP3bw4lA 01 摘要 本文提出的Rea…...

Spring Boot 集成实战:AI 工具如何自动生成完整微服务模块
在数字化转型的浪潮中,开发效率和质量是企业竞争力的关键要素。飞算 JavaAI 作为一款创新的 AI 工具,能在 Spring Boot 开发中,自动生成完整微服务模块,极大提升开发效率。下面,我们就详细介绍如何借助飞算 JavaAI&…...

Vue React
Vue 的源码主要分为以下几个部分: 主要涉及 响应式、虚拟 DOM、组件系统、编译器、运行时。 ├── packages/ │ ├── compiler-core/ # 编译器核心 │ ├── compiler-sfc/ # 处理 .vue 单文件组件 │ ├── compiler-dom/ # 处理 DOM 相关…...

Java高频面试之并发编程-01
hello啊,各位观众姥爷们!!!本baby今天来报道了!哈哈哈哈哈嗝🐶 面试官:并行跟并发有什么区别? 并发 vs 并行:核心区别与场景 1. 定义对比 维度并发(Concu…...
Android 高效底部导航方案:基于预定义 Menu 和 ViewPager2 的 Fragment 动态绑定实现)
(Kotlin)Android 高效底部导航方案:基于预定义 Menu 和 ViewPager2 的 Fragment 动态绑定实现
支持预定义 Menu 并绑定 Fragment,同时保留动态添加 Tab 的能力 BottomTabHelper.kt package smartconnection.com.smartconnect.home.utilimport android.content.Context import android.util.SparseArray import androidx.annotation.IdRes import androidx.fra…...
研究进展)
2024年零知识证明(ZK)研究进展
Sumcheck 整个领域正在转向更多地依赖于 Sumcheck Protocol Sumcheck是用于验证多项式承诺的协议,常用于零知识证明(ZKP)中,尤其是在可验证计算和扩展性上。它的主要目的是通过对多项式进行分段检查,从而保证某个多项…...

AI 驱动的安全分析的价值是什么?
作者:来自 Elastic Riya Juneja, Alyssa VanNice 与 Enterprise Strategy Group 一起量化经济影响 安全行业十分复杂,变化速度极快。攻击面、利益相关者需求、对手战术以及你使用的工具都在不断演变,导致许多安全团队不确定自己是否已做好准备…...
)
目标检测YOLO实战应用案例100讲-基于孤立森林算法的高光谱遥感图像异常目标检测(续)
目录 3.4 实验结果与分析 3.4.1 数据集介绍 3.4.2 实验参数分析 3.4.3 实验结果评价与讨论 基于高维孤立森林算法的高光谱图像异常检测 4.1 引言 4.2 基于高维孤立森林算法的异常检测模型 4.2.1 面向高维数据的改进策略 4.2.2 基于光谱有效信息率和目标-背景分离…...

flutter框架中文文档,android智能手机编程答案
RecyclerView优化全攻略:从数据处理到性能提升 字节跳动四面有三面都问了这个问题,在此做了整理,希望可以帮助到大家,欢迎查漏补缺。 数据处理和视图加载分离 我们知道,从远端拉取数据肯定是要放在异步的࿰…...

AWE 2025:当AI科技遇见智能家居
3月20日,以“AI科技、AI生活”为主题的AWE2025(中国家电及消费电子博览会)在上海新国际博览中心开幕。作为全球家电行业风向标,本届展会最大的亮点莫过于健康理念在家电领域的全面渗透。从食材保鲜到空气净化,从衣物清…...

Laraver SQL日志 服务开发
Laravel 项目运行中,有时候需要查看sql语句,分析sql运行的耗时,sql语句的复杂程度分析等等 总之,sql的执行在项目中,非常关键,接下来将说明在laravel 中 配置一个sql日志记录服务。 开发思路:…...

NG-ZORRO中tree组件的getCheckedNodeList怎么使用
在 NG-ZORRO(Ant Design for Angular) 的 Tree 组件 中,getCheckedNodeList 方法用于获取当前选中的节点列表(包括半选状态节点)。以下是具体用法和示例: 基本用法 首先,确保你已通过 ViewChil…...

win10之mysql server 8.0.41安装
一 mysql server 下载 官网下载地址页面 https://dev.mysql.com/downloads/mysql/二 免装版使用步骤 1 解压 下载完成后,解压文件夹,如下所示: 2 执行安装命令 D:\soft\mysql\mysql-8.0.41-winx64\mysql-8.0.41-winx64\bin>mysqld --install Service successfully in…...

蓝桥杯专项复习——二分
目录 二分查找、二分答案基础知识 二分查找模版 【模版题】数的范围 借教室 二分查找、二分答案基础知识 二分查找模版 【模版题】数的范围 输入样例 6 3 1 2 2 3 3 4 3 4 5输出样例 3 4 5 5 -1 -1 思路: 对应两个模版,起始位置是对应第一个模版…...

oracle中java类的使用
方式一: 编写一个简单的java类 vi OracleJavaDemo.java public class OracleJavaDemo { public static String processData(String input) { return "Processed: " input; } } 编译 javac OracleJavaDemo.java 生成OracleJavaDemo…...
高并发内存池(一):项目介绍和Thread Cache实现
前言:本文将要介绍的高并发内存池,它的原型是Google的⼀个开源项⽬tcmalloc,全称Thread-Caching Malloc,近一个月我将以学习为目的来模拟实现一个精简版的高并发内存池,并对核心技术分块进行精细剖析,分享在…...
MySQL与Redis数据一致性保障方案详解
前言 在现代分布式系统中,MySQL和Redis的结合使用非常普遍。MySQL作为关系型数据库负责持久化存储,而Redis则作为高性能缓存层提升系统的响应速度。然而,在这种架构下,如何保证MySQL与Redis之间的数据一致性是一个重要的挑战。本…...

“钉耙编程”2025春季联赛(2)题解(更新中)
1001 学位运算导致的 1002 学历史导致的 // Problem: 学历史导致的 // Contest: HDOJ // URL: https://acm.hdu.edu.cn/contest/problem?cid1151&pid1002 // Memory Limit: 524288 MB // Time Limit: 1000 ms // // Powered by CP Editor (https://cpeditor.org)#include …...

C#高级:启动、中止一个指定路径的exe程序
一、启动一个exe class Program {static void Main(string[] args){string exePath "D:\测试\Test.exe";// 修改为你要运行的exe路径StartProcess(exePath);}private static bool StartProcess(string exePath){// 创建一个 ProcessStartInfo 对象来配置进程启动参…...

【NumPy】1. 前言安装
0.前言 需要具备[[Python]]基础 定义: NumPy 通常与 [[SciPy]](Scientific Python)和 [[Matplotlib]](绘图库)一起使用, 这种组合广泛用于替代 [[MatLab]],是一个强大的科学计算环境,有助于我…...
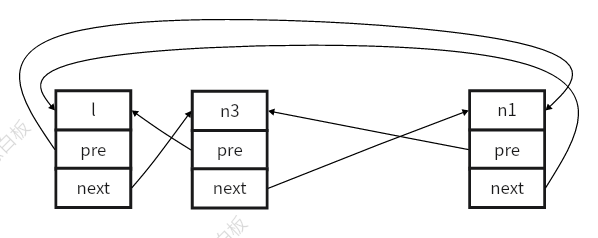
双向链表的理解
背景 代码中经常会出现双向链表,对于双向链表的插入和删除有对应的API函数接口,但直观的图表更容易理解,所以本文会对rt-thread内核代码中提供的双向链表的一些API函数操作进行绘图,方便后续随时查看。 代码块 rt-thread中提供…...

基于Spring Boot的家庭理财系统app的设计与实现(LW+源码+讲解)
专注于大学生项目实战开发,讲解,毕业答疑辅导,欢迎高校老师/同行前辈交流合作✌。 技术范围:SpringBoot、Vue、SSM、HLMT、小程序、Jsp、PHP、Nodejs、Python、爬虫、数据可视化、安卓app、大数据、物联网、机器学习等设计与开发。 主要内容:…...

【测试】每日3道面试题 3/31
长期更新,建议关注收藏点赞。 单元测试策略有哪些,主要内容。 白盒测试黑盒测试基于异常和边界的测试 主要内容:测试用例设计、执行、结果分析、自动化beta测试和alpha测试主要区别 主要区别:测试环境测试者 alphabeta时间先后测…...

Go 语言常见错误
代码及工程组织 1、意外的变量隐藏 示例代码: package mainimport ("fmt" )var FunTester "全局变量 FunTester"func main() {FunTester : "局部变量 FunTester"fmt.Println(FunTester) }func showGlobal() {fmt.Println(FunTest…...

216. 组合总和 III 回溯
目录 问题描述 解决思路 关键点 代码实现 代码解析 1. 初始化结果和路径 2. 深度优先搜索(DFS) 3. 遍历候选数字 4. 递归与回溯 示例分析 复杂度与优化 回溯算法三部曲 1. 路径选择:记录当前路径 2. 递归探索:进入下…...

【Python 算法】动态规划
本博客笔记内容来源于灵神,视频链接如下:https://www.bilibili.com/video/BV16Y411v7Y6?vd_source7414087e971fef9431117e44d8ba61a7&spm_id_from333.788.player.switch 01背包 计算了f[i1],f[i]就没用了,相当于每时每刻只有…...

nginx的自定义错误页面
正常访问一个不存在的页面是会报404这个错误 我们可以自定义错误页面 error_page 404 /40x.html 然后调用location 最后创建文件 写入你想写的内容 最后实验成功 注意在nginx的配置文件里,注意在加分号 在写完配置时...

制作service列表并打印出来
制作service列表并打印出来 在Linux中,服务(Service)是指常驻在内存中的进程,这些进程通常监听某个端口,等待其他程序的请求。服务也被称为守护进程(Daemon),它们提供了系统所需的各…...

UML 4+1 视图:搭建软件架构的 “万能拼图”
UML 41 视图是一种全面描述软件架构的方法,以下为你详细介绍各个视图: 1.逻辑视图(Logical View) 概述:逻辑视图主要用于展现系统的功能架构,它聚焦于系统提供的功能以及这些功能的逻辑组织方式ÿ…...

tkinter 库(设计图形界面系统)
几何管理的应用 # tkinter 库 是Python的标准GUI库,提供了创建图形用户界面的功能。 tkinter是一个跨平台的GUI库,支持Windows、macOS和Linux等操作系统。它是Python的标准库之一,无需额外安装。 #tkinter.Entry 是 Tkinter 的输入框控件类&…...