详解相机的内参和外参,以及内外参的标定方法
1 四个坐标系
要想深入搞清楚相机的内参和外参含义, 首先得清楚以下4个坐标系的定义:
- 世界坐标系: 名字看着很唬人, 其实没什么大不了的, 这个就是你自己定义的某一个坐标系。 比如, 你把房间的某一个点定为原点, 并且定义好方向, 这就是世界坐标系。 一般是个三维坐标系, 单位是m
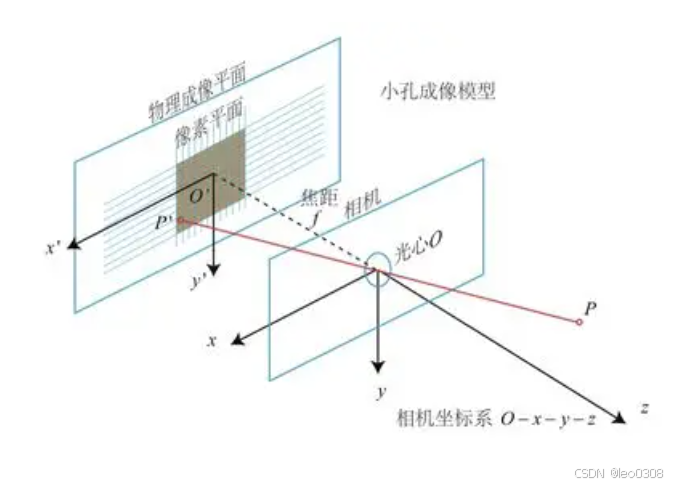
- 相机坐标系: 以相机光心为原点, 一般我们把z轴指向相机前方,x向右,y向下,是个三维坐标系, 单位是m
- 成像平面坐标系: 这个是定义在物理成像平面的坐标系,方向定义与相机坐标系一致(没有z方向), 原点是光心在物理成像平面上的投影,是个二维坐标系, 单位是m。 注意, 我们一般都会忽略这个坐标系, 因为它是个中间过渡状态, 很少直接使用它。
- 像素坐标系: 这个应该是最为常用, 也最为大家熟悉的坐标系, 计算机视觉任务的输出的坐标表达基本都是在这个坐标系。 它是个二维坐标系, 原点通常在图像的左上角, x向右,y向下, 单位是像素, 没有具体的尺度。
2 内参和外参
除了世界坐标系, 后面三个坐标系只跟相机本身有关。 相机内参表达的就是这三个坐标之间的转换关系, 而相机外参表达的是相机与世界坐标系之间的转换关系。
成像的过程实质上是几个坐标系的转换。首先空间中的一点由世界坐标系转换到相机坐标系 ,然后再将其投影到物理成像平面 ( 成像平面坐标系 ) ,最后再将成像平面上的数据转换像素坐标系 。
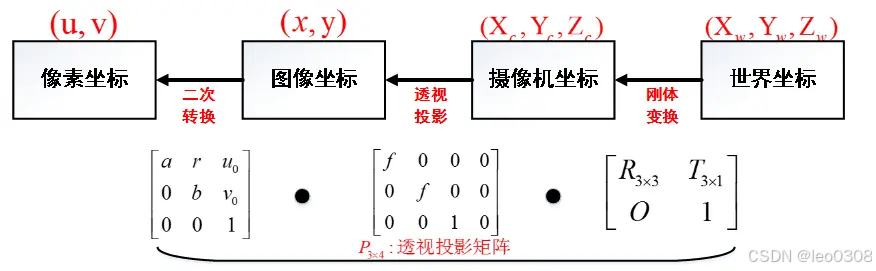
从世界坐标到像素坐标总共有3步转换, 前面2个合在一起就是相机内参, 最后一个是相机外参。
上面矩阵中的参数很好理解, 也都有明确的物理含义: a 和b 表示从成像平面坐标转到像素坐标时, 分别在x和y轴上的缩放系数, u 0 u_0 u0和 v 0 v_0 v0是原点的平移量。 r r r是扭曲因子, 一般为0。 f f f是相机的焦距。 R和T是旋转和平移矩阵。
把前面2个合一起, 就得到了如下更为常见的内参矩阵:
K = [ f x 0 c x 0 f y c y 0 0 1 ] \mathbf{K} = \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} K= fx000fy0cxcy1
下面的讲解中, 我们直接用这种形式,跳过成像平面坐标系。
注意, 实际上内参包含2部分: 内参矩阵K和畸变系数D, 上面只讲到了内参矩阵的原理, 没有讲畸变系数。 这里简单列一下畸变系数, 不做详细介绍。
D = [k1 k2 p1 p2 k3]
其中 k1、k2、k3 是径向畸变系数(radial distortion coefficients) p1、p2 是切向畸变系数(tangential distortion coefficients)。
3 常用的坐标转换
假设有某一个点, 在世界坐标下的坐标为 P w = ( X w , Y w , Z w ) P_w = (X_w, Y_w, Z_w) Pw=(Xw,Yw,Zw), 在相机坐标系下的坐标为 P = ( X c , Y c , Z c ) P = (X_c, Y_c, Z_c) P=(Xc,Yc,Zc), 在像素坐标系下的坐标为 P u v = ( u , v ) P_{uv} = (u, v) Puv=(u,v)。
-
世界坐标转到相机坐标:
P = R P w + t P = RP_w + t P=RPw+t -
相机坐标转到像素坐标:
P u v = 1 Z c K P P_{uv} =\frac 1{Z_c} KP Puv=Zc1KP
展开就是:
[ u v 1 ] = 1 Z c K [ X c Y c Z c ] = 1 Z c [ f x 0 c x 0 f y c y 0 0 1 ] [ X c Y c Z c ] \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = \frac 1{Z_c} \mathbf{K} \begin{bmatrix} X_c \\ Y_c \\ Z_c \\ \end{bmatrix} = \frac 1{Z_c} \begin{bmatrix} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} X_c \\ Y_c \\ Z_c \\ \end{bmatrix} uv1 =Zc1K XcYcZc =Zc1 fx000fy0cxcy1 XcYcZc
注意上面有个尺度因子跟 Z c Z_c Zc有关, 从相机坐标系的三维坐标投影到像素平面的二维坐标, 实际上丢失了Z方向也就是深度信息。 所以如果不知道深度, 从像素坐标就无法恢复出准确的相机坐标。
4 内外参标定方法
4.1 内参标定方法
内参标定通常使用张正友标定法, 也就是常见的棋盘格标定。
4.2 外参标定方法
外参标定的核心是:已知多个点分别在相机坐标系下的坐标和在世界坐标系下的坐标, 求它们之间的映射关系。
常用求解PnP 的方法,即已知多个点, 在像素坐标系的二维坐标, 和在世界坐标系的三维坐标,并且已知内参, 求解旋转平移矩阵。
相关文章:
详解相机的内参和外参,以及内外参的标定方法
1 四个坐标系 要想深入搞清楚相机的内参和外参含义, 首先得清楚以下4个坐标系的定义: 世界坐标系: 名字看着很唬人, 其实没什么大不了的, 这个就是你自己定义的某一个坐标系。 比如, 你把房间的某一个点定…...

在线sql 转 rust 模型(Diesel、SeaORM),支持多数据 mysql, pg等
SQL 转 Rust 在 Rust 语言中,常用 Diesel 和 SeaORM 进行数据库操作。手写 ORM 模型繁琐,gotool.top 提供 SQL 转 Diesel、SeaORM 工具,自动生成 Rust 代码,提高开发效率。 特色 支持 Diesel / SeaORM,生成符合规范…...

高并发内存池(二):Central Cache的实现
前言:本文将要讲解的高并发内存池,它的原型是Google的⼀个开源项⽬tcmalloc,全称Thread-Caching Malloc,近一个月我将以学习为目的来模拟实现一个精简版的高并发内存池,并对核心技术分块进行精细剖析,分享在…...
[Windows] VutronMusic v1.6.0 音乐播放器纯净版,可登录同步
VutronMusic-简易好看的PC音乐播放器 链接:https://pan.xunlei.com/s/VOMq7P_fTyhLUXeGerDVhrCTA1?pwduvut# VutronMusic v1.6.0 音乐播放器纯净版,可登录同步...

macvlan 和 ipvlan 实现原理及设计案例详解
一、macvlan 实现原理 1. 核心概念 macvlan 允许在单个物理网络接口上创建多个虚拟网络接口,每个虚拟接口拥有 独立的 MAC 地址 和 IP 地址。工作模式: bridge 模式(默认):虚拟接口之间可直接通信,类似交…...
【蓝桥杯】每日练习 Day19,20
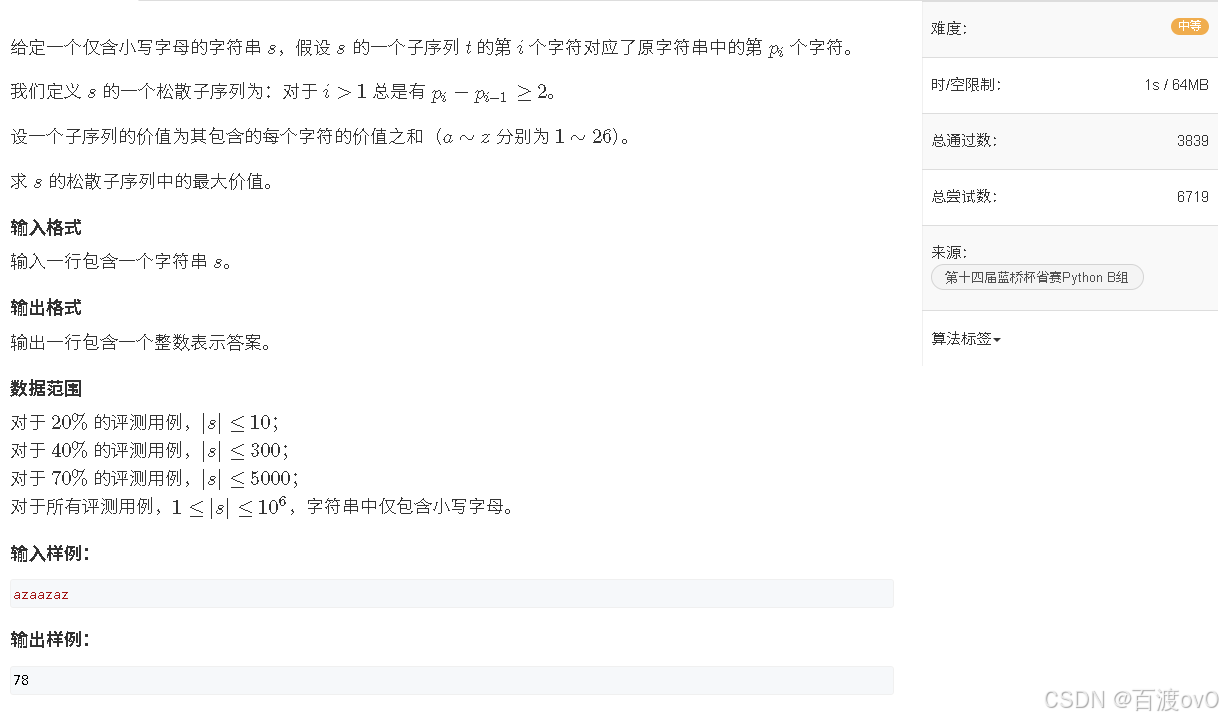
目录 前言 蒙德里安的梦想 分析 最短Hamilton路径 分析 代码 乌龟棋 分析 代码 松散子序列 分析 代码 代码 前言 今天不讲数论(因为上课学数论真是太难了,只学了高斯消元)所以今天就不单独拿出来讲高斯消元了。今天讲一下昨天和…...

《AI大模型应知应会100篇》第7篇:Prompt Engineering基础:如何与大模型有效沟通
第7篇:Prompt Engineering基础:如何与大模型有效沟通 摘要 Prompt Engineering(提示工程)是与大模型高效沟通的关键技能。通过精心设计的Prompt,可以让模型生成更准确、更有用的结果。本文将从基础知识到高级策略&…...

微服务架构技术栈选型避坑指南:10大核心要素深度拆解
微服务架构的技术栈选型直接影响系统的稳定性、扩展性和可维护性。以下从10大核心要素出发,结合主流技术方案对比、兼容性评估、失败案例及优化策略,提供系统性选型指南。 1. 服务框架与通信 关键考量点 扩展性:框架需支持定制化扩展&#x…...

Elasticsearch 正排索引
一、正排索引基础概念 在 Elasticsearch 中,正排索引用于存储完整的文档内容,以便通过文档ID 快速定位文档的字段值。正排索引通过 Doc Values 和 Store Fields 两种形式,为聚合、排序、脚本计算等场景提供高效支持。Doc Values 的列式存储设…...
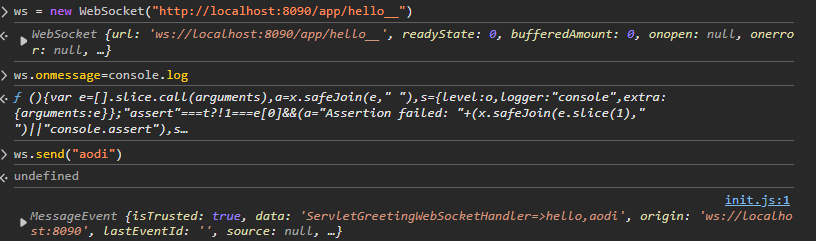
Spring实现WebScoket
SpringWeb编程方式分为Servlet模式和响应式。Servlet模式参考官方文档:Web on Servlet Stack :: Spring Framework,响应式(Reacive)参考官方文档:Web on Reactive Stack :: Spring Framework。 WebSocket也有两种编程方…...

Token是什么?
李升伟 整理 “Token” 是一个多义词,具体含义取决于上下文。以下是几种常见的解释: 1. 计算机科学中的 Token 定义:在编程和计算机科学中,Token 是源代码经过词法分析后生成的最小单位,通常用于编译器和解释器。 …...

odoo-045 ModuleNotFoundError: No module named ‘_sqlite3‘
文章目录 一、问题二、解决思路 一、问题 就是项目启动,本来好好地,忽然有一天报错,不知道什么原因。 背景: 我是在虚拟环境中使用的python3.7。 二、解决思路 虚拟环境和公共环境直接安装 sqlite3 都会报找不到这个库的问题…...

cesium加载CTB生成的地形数据
由于CTB生成的地形数据是压缩的(gzip)格式,需要在nginx加上特殊配置才可以正常加载,NGINX全部配置如下 worker_processes 1; events {worker_connections 1024; } http {include mime.types;default_type application/o…...

前端JS高阶技法:序列化、反序列化与多态融合实战
✨ 摘要 序列化与反序列化作为数据转换的核心能力,与多态这一灵活代码设计的核心理念,在现代前端开发中协同运作,提供了高效的数据通信与扩展性支持。 本文从理论到实践,系统解析: 序列化与反序列化的实现方式、使用…...

TS中的Class
基本用法 implements implements 关键字用于传递对类产生约束的数据类型 interface AnimalInfo{name:stringrace:stringage:number }interface AnimalCls{info:AnimalInfosayName():void} class Animal implements AnimalCls{info:AnimalInfoconstructor(info:AnimalInfo) {t…...
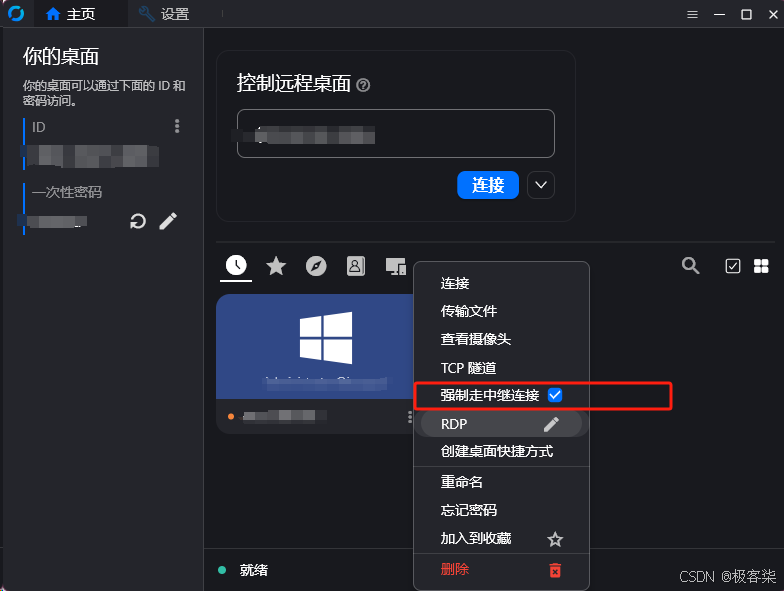
RustDesk 开源远程桌面软件 (支持多端) + 中继服务器伺服器搭建 ( docker版本 ) 安装教程
在需要控制和被控制的电脑上安装软件 github开源仓库地址 https://github.com/rustdesk/rustdesk/releases 蓝奏云盘备份 ( exe ) https://geek7.lanzouw.com/iPf592sadqrc 密码:4esi 中继服务器设置 使用docker安装 sudo docker image pull rustdesk/rustdesk-server sudo…...
)
【计网速通】计算机网络核心知识点与高频考点——数据链路层(二)
数据链路层核心知识点(二) 涵盖局域网、广域网、介质访问控制(MAC层)及数据链路层设备 上文链接:https://blog.csdn.net/weixin_73492487/article/details/146571476 一、局域网(LAN,Loacl Area Network&am…...
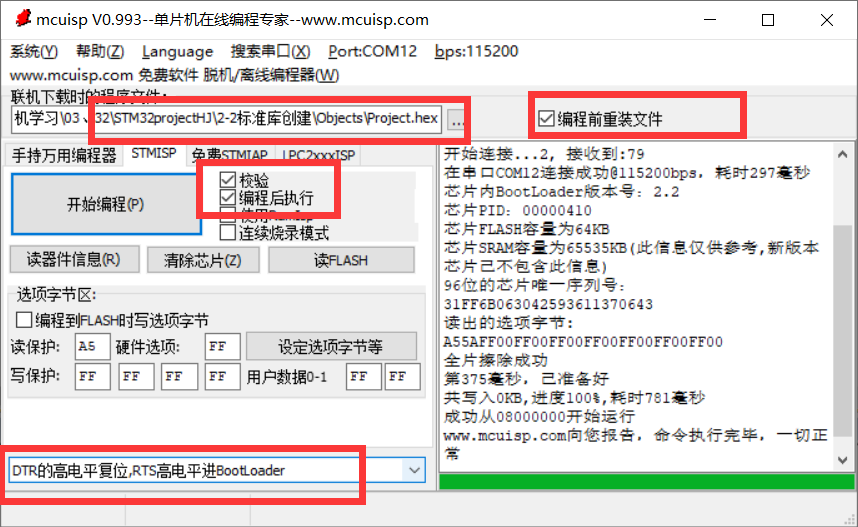
STM32单片机入门学习——第3-4节: [2-1、2]软件安装和新建工程
写这个文章是用来学习的,记录一下我的学习过程。希望我能一直坚持下去,我只是一个小白,只是想好好学习,我知道这会很难,但我还是想去做! 本文写于:2025.04.01 STM32开发板学习——第一节: [1-1]课程简介 前言开发板说明引用解答和…...

W3C XML Schema 活动
W3C XML Schema 活动 概述 W3C XML Schema(XML Schema)是万维网联盟(W3C)定义的一种数据描述语言,用于定义XML文档的结构和约束。XML Schema为XML文档提供了一种结构化的方式,确保数据的一致性和有效性。本文将详细介绍W3C XML Schema的活动,包括其发展历程、主要特点…...

爬虫【Scrapy-redis分布式爬虫】
Scrapy-redis分布式爬虫 1.Scrapy-redis实现增量爬虫 增量爬虫的含义 就是前面所说的的暂停、恢复爬取 安装 # 使用scrapy-redis之前最好将scrapy版本保持在2.8.0版本, 因为2.11.0版本有兼容性问题 pip install scrapy==2.8.0 pip install scrapy-redis -i https://pypi.tun…...
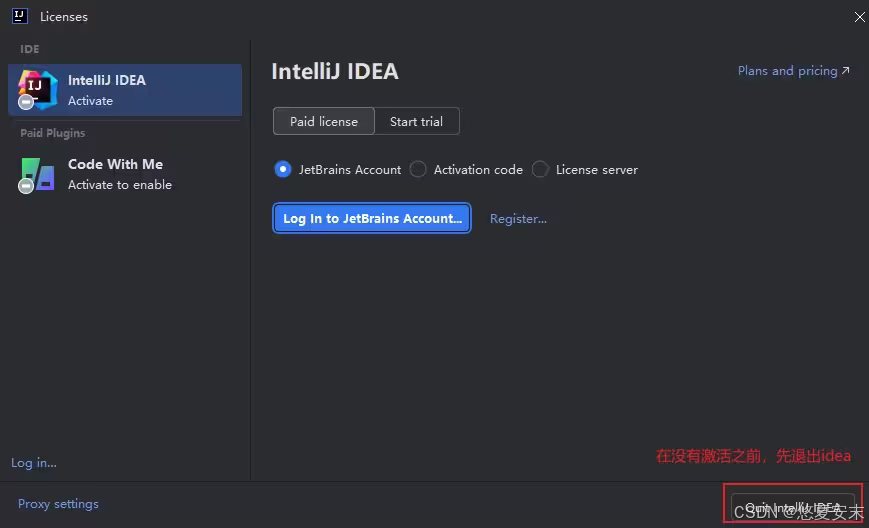
intellij Idea 和 dataGrip下载和安装教程
亲测有效 第一步:卸载老版本idea/Datagrip (没有安装过的可跳过此步骤) 第二步:下载idea/dataGrip安装包 建议选择2022以后的版本 官网: https://www.jetbrains.com/datagrip/download/other.html 选择dataGrip 的…...

轻量级搜索接口技术解析:快速实现关键词检索的Java/Python实践
Hi,你好! 轻量级搜索接口技术解析:快速实现关键词检索的Java/Python实践 接口特性与适用场景 本接口适用于需要快速集成搜索能力的开发场景,支持通过关键词获取结构化搜索结果。典型应用场景包括: 垂直领域信息检索…...
架构设计基础系列:事件溯源模式浅析
图片来源网络,侵权删 1. 引言 1.1 研究背景 传统CRUD模型的局限性:状态覆盖导致审计困难、无法追溯历史。分布式系统复杂性的提升:微服务架构下数据一致性、回滚与调试的需求激增。监管合规性要求:金融、医疗等领域对数…...

ResNet系列和ViT系列预训练模型权重文件下载
一、简单介绍 OpenAI CLIP项目提供的预训练模型权重文件列表,主要包含两种架构系列和不同规模配置: ResNet系列 (RN) 基础版本:RN50(ResNet-50)扩展版本:RN50x4、RN50x16、RN50x64(宽度扩展&am…...
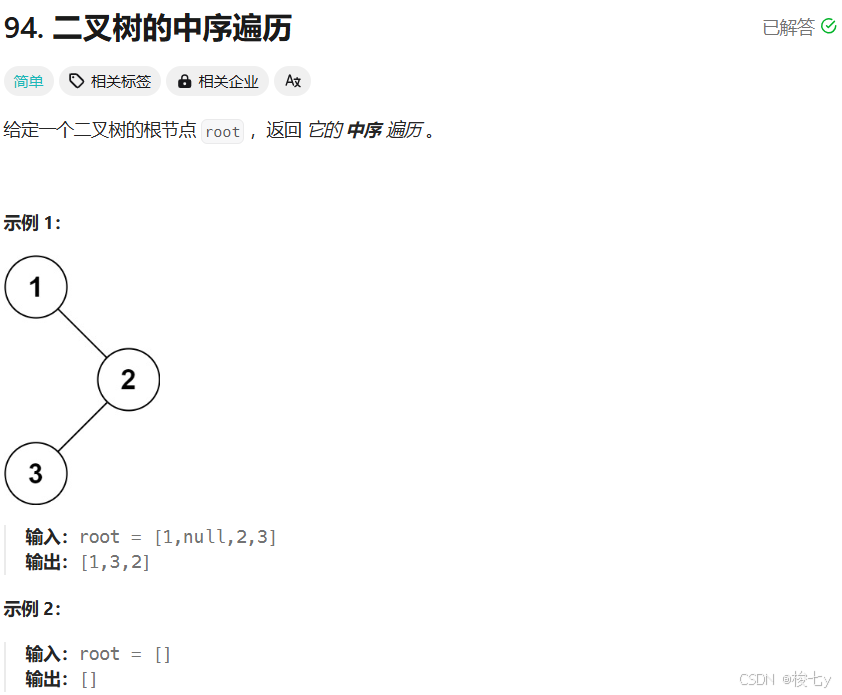
【力扣hot100题】(035)二叉树的中序遍历
正常方法递归很简单,于是又学了一种栈的方法。 原理如下:每次循环先尽量将目前节点入栈并左移,没有左节点时回到栈首节点将目前节点放入结果容器中并移出栈外,目前节点变为该节点的右节点,循环结束条件是目前节点为nu…...

《数字图像处理》教材寻找合作者
Rafael Gonzalez和Richard Woods所著的《数字图像处理》关于滤波器的部分几乎全错,完全从零开始写,困难重重。关于他的问题已经描述在《数字图像处理(面向新工科的电工电子信息基础课程系列教材)》。 现寻找能够共同讨论、切磋、…...

批量删除 txt/html/json/xml/csv 等文本文件中的重复行
在文本文件中,可能会存在一些重复的数据行,这可能不是我们期望的,因此我们会碰到需要删除文本文件中重复行的情况。如果是人工删除,当文件较大或者数量较多的时候,处理的难度会较大。今天就给大家介绍一下批量删除文本…...

LangChain 使用向量数据库介绍与使用
LangChain 是一个用于构建大语言模型(LLM)应用的框架,而向量数据库在 LangChain 中主要用于实现检索增强生成(RAG, Retrieval-Augmented Generation),即通过向量搜索从外部知识库中快速检索相关信息,辅助大模型生成更准确的回答。以下是具体的使用方法: 1. 核心流程 L…...

基于微信小程序的智慧乡村旅游服务平台【附源码】
基于微信小程序的智慧乡村旅游服务平台(源码L文说明文档) 目录 4系统设计 4.1系统功能设计 4.2系统结构 4.3.数据库设计 4.3.1数据库实体 4.3.2数据库设计表 5系统详细实现 5.1 管理员模块的实现 5.1.1旅游景点管理…...

d202542
一、142.环形链表I 142. 环形链表 II - 力扣(LeetCode) 用set统计一下 如果再次出现那么就环的第一个return返回就行 public ListNode detectCycle(ListNode head) {Set<ListNode> set new HashSet<>();ListNode cur head;while(cur ! …...