Python----机器学习(线性回归:自求导的方法实现)
一、线性回归方程
目标:
线性回归的目标是找到最佳的系数来使模型与观察到的数据尽可能拟合。
应用:
预测:给定自变量的值,预测因变量的值。
回归分析:确定自变量对因变量的影响程度
线性回归是统计学和机器学习中最简单且最常用的技术之一,它提供了一个基本的框架来理解和分析变量之间的关系,并用于许多实际应用中,如经济学、金融学、医学、社会科学等领域。
二、参数和超参数
2.1、参数
模型中可调整的变量,它们用来捕捉数据中的模式和特征。这些参数在模型训练过程中被不断调整以最小化损失函数或优化某种目标。
权重(Weights):用来表示不同输入特征与神经元之间的连接强度
偏置(Biases):用于调整每个神经元的激活阈值,使模型能够更好地拟合数据
2.2、超参数
超参数(Hyperparameters)是机器学习和深度学习模型中的一类参数, 它们不是通过训练数据学习得到的,而是在训练过程之前需要手动设置的参数。
与模型的权重和偏置等参数不同,超参数并不直接控制模型的学习过程。 相反,超参数是在训练之前选择或调整的一组参数,用于定义模型的架 构、优化算法、学习率、正则化强度、迭代次数等。它们的选择往往是基 于经验、启发式规则、交叉验证等方法。
常见的超参数包括但不限于以下几个例子:
1. 学习率(Learning Rate):用于控制优化算法中每次更新参数时的步 长。较小的学习率会导致训练收敛较慢,而较大的学习率可能导致训练 不稳定或震荡。
2. 正则化参数(Regularization Parameter):用于控制正则化的强度, 如L1正则化和L2正则化。较大的正则化参数会增强正则化效果,有助 于防止过拟合。
3. 迭代次数(Number of Iterations):用于控制训练的迭代次数。迭代次数太小可能导致模型未完全学习数据的特征,而迭代次数太大可能导 致过拟合。
4. 批量大小(Batch Size):用于控制每次训练时用于更新参数的样本数 量。批量大小的选择会影响训练速度和内存消耗。
5. 神经网络层数和每层的神经元数量(Number of Layers and Neurons per Layer):用于定义神经网络的结构。
6. 激活函数(Activation Function):用于控制神经网络每个神经元的输 出范围,如Sigmoid、ReLU等。
选择合适的超参数对于模型的性能和泛化能力至关重要。通常,人们需要 通过多次试验和交叉验证等方法来调整超参数,以找到最优的组合,从而 获得最好的模型性能。调整超参数是机器学习和深度学习模型开发中一个 重要的步骤,也是一个相对耗时的过程。
三、反向传播

四、设计思路
散点输入
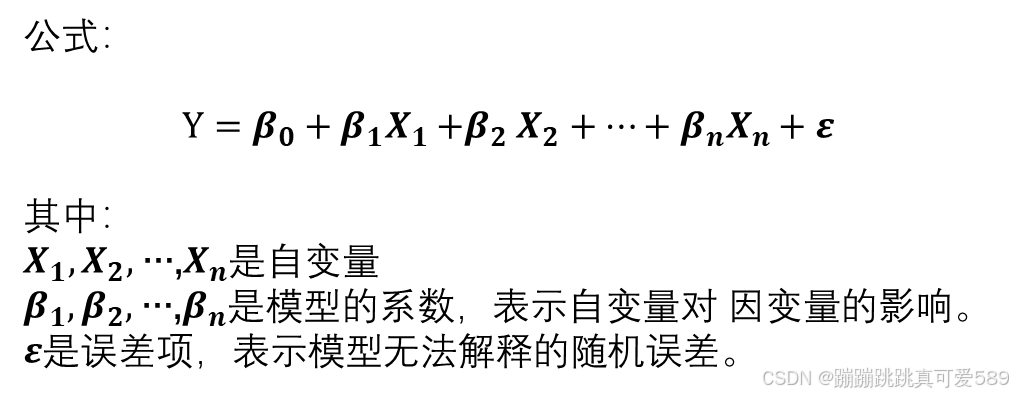
data = np.array([[-0.5, 7.7],[1.8, 98.5],[0.9, 57.8],[0.4, 39.2],[-1.4, -15.7],[-1.4, -37.3],[-1.8, -49.1],[1.5, 75.6],[0.4, 34.0],[0.8, 62.3]
])
x_data = data[:, 0]
y_data = data[:, 1]参数初始化
w = 0
b = 0
learning_rate = 0.01损失函数
def loss_fun(X, Y, w, b):_y_hat = X * w + bloss = np.mean((2 * (_y_hat - Y) ** 2))return loss散点图
for n in range(1, 501): # 进行 500 次迭代训练 # a = wx + b # 根据当前参数计算预测值 y_hat = w * x_data + b # 计算根据参数得到的预测值 # da/dw = x # w 对预测值的影响(斜率) # e = (y - a) ** 2 # 计算损失(误差的平方) # de/da = -2 * (y - a) # 计算损失对预测值的导数(梯度) # de/dw = de/da * da/dw # 链式法则计算损失对 w 的梯度 # de/dw = -2 * (y - a) * x # 损失对 w 的梯度 gradient_w = np.mean(2 * (y_hat - y_data) * x_data) # 计算 w 的梯度均值 # de/db = de/da * da/db # 同样的逻辑应用于 b # de/db = -2 * (y - a) # 损失对 b 的梯度 gradient_b = np.mean(2 * (y_hat - y_data)) # 计算 b 的梯度均值 # 梯度下降更新参数: w = w - learning_rate * gradient_w # 更新权重 w b = b - learning_rate * gradient_b # 更新偏置 b if n % 10 == 0 or n == 1: # 每 10 次迭代或第一次迭代时 plt.cla() # 清空当前图形 min_x = x_data.min() # 获取 x 数据的最小值 max_x = x_data.max() # 获取 x 数据的最大值 min_y = w * min_x + b # 根据当前的 w 和 b 计算最小 y 值 max_y = w * max_x + b # 根据当前的 w 和 b 计算最大 y 值 plt.scatter(x_data, y_data, marker='o', color='b') # 绘制散点图 plt.plot([min_x, max_x], [min_y, max_y], color='r') # 绘制拟合线 plt.xlabel('X') # 设置 x 轴标签 plt.ylabel('Y') # 设置 y 轴标签 plt.pause(1) # 暂停 1 秒以更新图形 plt.show() # 最后显示图形 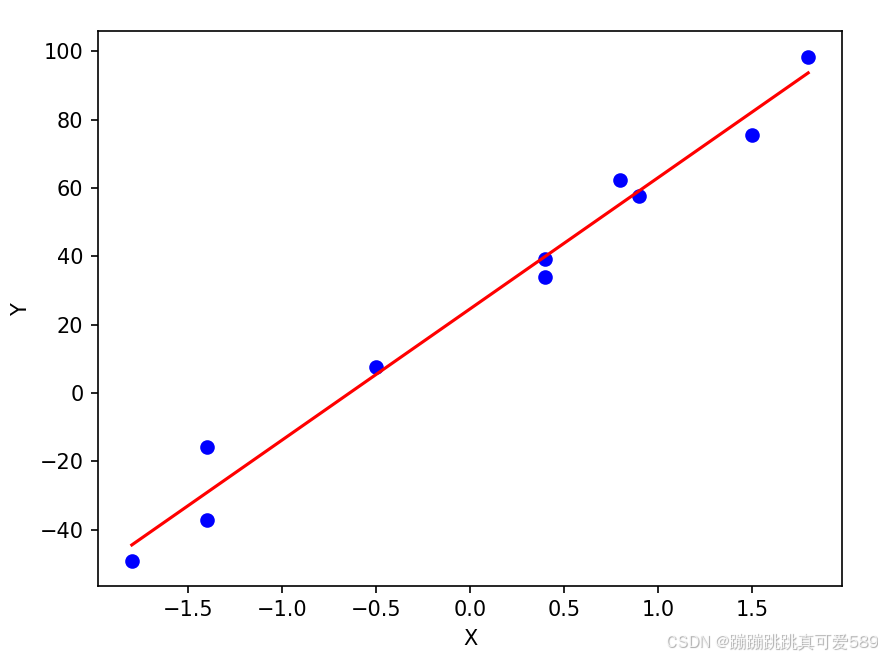
损失图
# 创建网格用于绘制等高线
w_values = np.linspace(-20, 80, 100)
b_values = np.linspace(-20, 80, 100)
W, B = np.meshgrid(w_values, b_values)
loss_value = np.zeros_like(W)# 计算每对 (w, b) 的损失值
for i in range(len(w_values)):for j in range(len(b_values)):loss_value[j, i] = loss_fun(x_data, y_data, w_values[i], b_values[j])# 训练过程
path = [] # 路径记录 w 和 b 的值
for n in range(1, 501):path.append((w, b)) # 记录当前参数值y_hat = w * x_data + b # 预测值# 计算梯度gradient_w = np.mean(2 * (y_hat - y_data) * x_data)gradient_b = np.mean(2 * (y_hat - y_data))# 梯度下降法更新参数w -= learning_rate * gradient_wb -= learning_rate * gradient_b# 每 10 次迭代或第一次迭代时绘制if n % 10 == 0 or n == 1:plt.clf() # 清空当前图形plt.contourf(W, B, loss_value, levels=20, cmap='viridis') # 绘制等高线图plt.colorbar() # 显示颜色条plt.scatter(w, b, c='r', label='当前参数') # 绘制当前参数点plt.plot(*zip(*path), c='r', label='路径') # 绘制路径plt.title(f'迭代次数: {n}')plt.xlabel('w')plt.ylabel('b')plt.legend()plt.show() 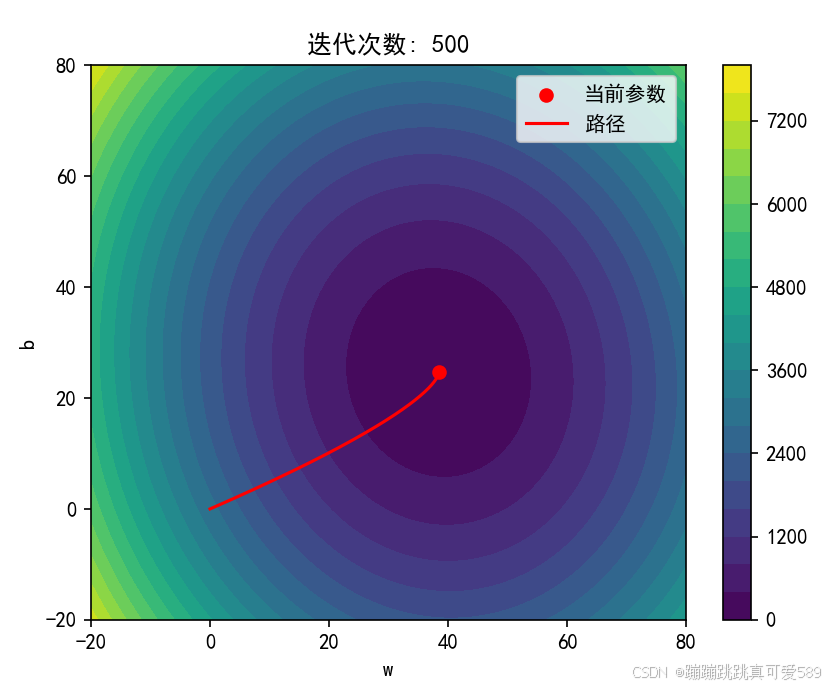
W,B等离线
完整代码
import numpy as np
from matplotlib import pyplot as plt
from matplotlib import gridspec # 1. 散点输入
data = np.array([ [-0.5, 7.7], [1.8, 98.5], [0.9, 57.8], [0.4, 39.2], [-1.4, -15.7], [-1.4, -37.3], [-1.8, -49.1], [1.5, 75.6], [0.4, 34.0], [0.8, 62.3]
])
x_data = data[:, 0] # 获取输入数据的 x 值
y_data = data[:, 1] # 获取输入数据的 y 值 # 2. 参数初始化
w = 0 # 权重初始值
b = 0 # 偏置初始值
learning_rate = 0.01 # 学习率,用于更新参数的步长 # 3. 损失函数
def loss_fun(X, Y, w, b): _y_hat = X * w + b # 根据当前权重和偏置计算预测值 loss = np.mean((2 * (_y_hat - Y) ** 2)) # 计算均方误差损失 return loss fig = plt.figure(figsize=(12, 6))
g = gridspec.GridSpec(2, 2) # 创建一个 2x2 的网格 ax2 = fig.add_subplot(g[0, 0]) # 上左子图用于散点图
ax2.set_xlabel('X') # 设置 x 轴标签
ax2.set_ylabel('Y') # 设置 y 轴标签 ax3 = fig.add_subplot(g[1, 0]) # 下左子图用于参数可视化
ax3.set_xlabel('w') # 设置 w 轴标签
ax3.set_ylabel('b') # 设置 b 轴标签 ax1 = fig.add_subplot(g[:, 1], projection='3d') # 右侧 3D 子图用于损失可视化
w_values = np.linspace(-20, 80, 100) # 生成 w 的取值范围
b_values = np.linspace(-20, 80, 100) # 生成 b 的取值范围
W, B = np.meshgrid(w_values, b_values) # 创建网格以计算损失值
loss_value = np.zeros_like(W) # 初始化损失值数组 # 计算每对 (w, b) 的损失值
for i, w in enumerate(w_values): for j, b in enumerate(b_values): loss_value[j, i] = loss_fun(x_data, y_data, w, b) # 计算并保存损失值 # 绘制损失表面
ax1.plot_surface(W, B, loss_value, alpha=0.8, cmap='viridis') # 绘制 3D 表面
ax1.set_xlabel('w') # 设置 x 轴标签
ax1.set_ylabel('b') # 设置 y 轴标签
ax1.set_zlabel('loss') # 设置 z 轴标签 path = [] # 用于记录 w 和 b 的值以绘制路径 # 4. 开始迭代
for n in range(1, 501): path.append((w, b)) # 记录当前 w 和 b 的值 # 5、反向传播,手动计算损失函数关于自变量(模型参数)的梯度 # a=wx+b y_hat = w * x_data + b # 计算预测值 # da/dw=x # e=(y-a)**2 # de/da=-2(y-a) # de/dw=de/da * da/dw # de/dw=-2(y-a)*x gradient_w = np.mean(2 * (y_hat - y_data) * x_data) # 计算关于 w 的梯度 # de/db=de/da * da/db # de/db=-2(y-a) gradient_b = np.mean(2 * (y_hat - y_data)) # 计算关于 b 的梯度 # 梯度下降 w = w - learning_rate * gradient_w # 更新 w b = b - learning_rate * gradient_b # 更新 b # 6. 显示频率设置 if n % 10 == 0 or n == 1: # 每10次迭代或者第一次迭代显示一次 x_min = x_data.min() # 获取 x 值的最小值 x_max = x_data.max() # 获取 x 值的最大值 y_min = w * x_min + b # 根据当前的 w 和 b 计算最小 y 值 y_max = w * x_max + b # 根据当前的 w 和 b 计算最大 y 值 ax2.cla() # 清除之前的图形 ax2.scatter(x_data, y_data) # 绘制散点图 ax2.plot([x_min, x_max], [y_min, y_max], c='r') # 绘制拟合线 ax3.contourf(W, B, loss_value, levels=20) # 绘制等高线图 ax3.scatter(w, b, c='r') # 绘制当前参数点 ax1.scatter(w, b, loss_fun(x_data, y_data, w, b)) # 在3D图中添加当前损失点 if len(path) > 0: path_w, path_b = zip(*path) # 分离记录的 w 和 b ax3.plot(path_w, path_b, c='r') # 绘制路径 # 在 3D 图中绘制路径 ax1.plot(path_w, path_b, [loss_fun(x_data, y_data, w_val, b_val) for w_val, b_val in zip(path_w, path_b)], c='r') plt.pause(1) # 暂停 1 秒plt.show() # 显示最终图形 
相关文章:
Python----机器学习(线性回归:自求导的方法实现)
一、线性回归方程 目标: 线性回归的目标是找到最佳的系数来使模型与观察到的数据尽可能拟合。 应用: 预测:给定自变量的值,预测因变量的值。 回归分析:确定自变量对因变量的影响程度 线性回归是统计学和机器学习中最简…...

Parasoft C++Test软件单元测试_操作指南
系列文章目录 Parasoft C++Test软件静态分析:操作指南(编码规范、质量度量)、常见问题及处理 Parasoft C++Test软件单元测试:操作指南、实例讲解、常见问题及处理 Parasoft C++Test软件集成测试:操作指南、实例讲解、常见问题及处理 进阶扩展:自动生成静态分析文档、自动…...
)
QT之QML(简单示例)
需求一:点击按钮弹出菜单,并且自定义菜单弹出位置。 mouse.x 和 mouse.y 获取的是相对于 MouseArea(在这个例子中是 Button)左上角的局部坐标。如果你想要在鼠标点击位置显示 Menu,你需要将这个局部坐标转换为相对于应…...

【自动化运维】Python 的安装和使用
Python 的安装和使用 文章目录 Python 的安装和使用一、Linux环境安装Python1.1、设置Yum仓库1.2、安装依赖包1.3、编译Python1.3.1、解压Python压缩包1.3.2、配置Python1.3.3、编译及安装1.3.4、链接软连接 1.4、测试Python3运行1.5、设置国内pip更新源1.6、更新pip版本&#…...
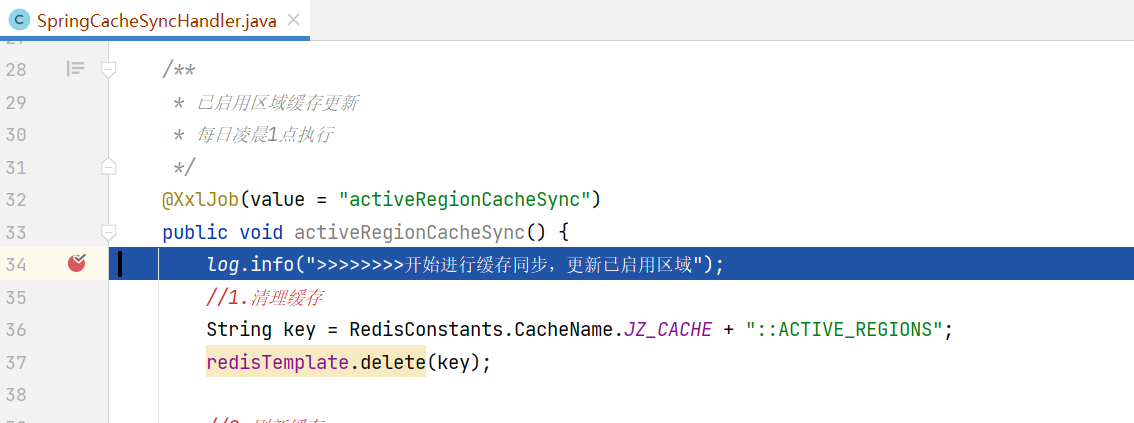
Springcache+xxljob实现定时刷新缓存
目录 SpringCache详解 SpringCache概述 核心原理 接口抽象与多态 AOP动态代理 核心注解以及使用 公共属性 cacheNames KeyGenerator:key生成器 key condition:缓存的条件,对入参进行判断 注解 xxl-job详解 SpringcacheRedis实现…...

线性规划建模工具 PuLP 学习指南
PuLP 是一个用 Python 编写的线性规划建模工具,它提供了直观的 API 来定义和求解各种优化问题。以下是学习 PuLP 的全面指南: 1. 安装 PuLP pip install pulp2. 基本概念 问题类型 LpProblem: 表示优化问题LpVariable: 表示决策变量LpConstraint: 表…...
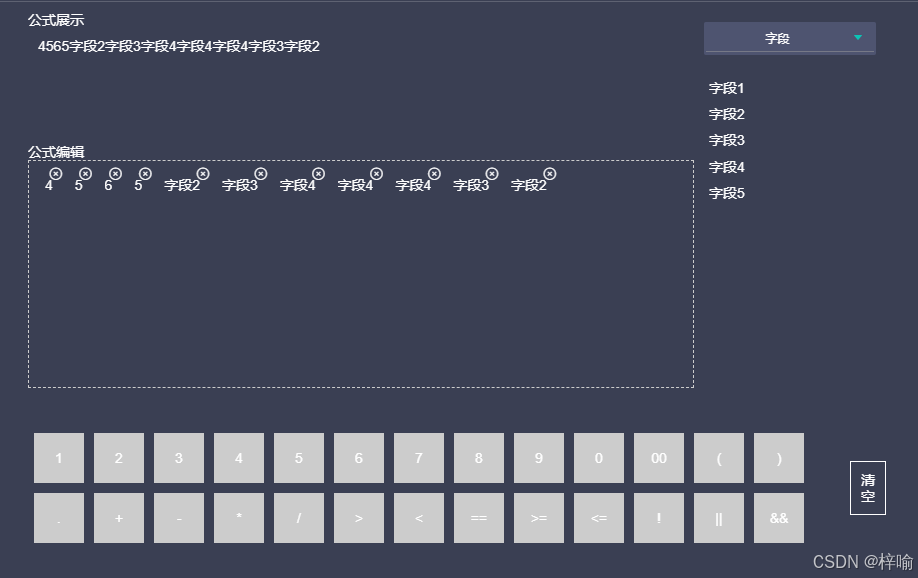
vue2拖拉拽做个模拟公式工具
1. 成图 2. 介绍 就是简单拖拉拽来做个规则运算器,具体运算规则、校验规则自己加。 3. 代码 HTML代码 <template><div class"red-cont"><div class"red-top"><divclass"red-top-left"><div class&quo…...
)
两点与圆(异或神通)
给出 n 个圆,保证任意两个圆都不相交且不相切。 然后给出两个点 (x1,y1),(x2,y2),保证均不在某个圆上。现在要从 (x1,y1)→(x2,y2) 画条曲线,问这条曲线最少穿过多少次圆的边界? 输入格式 第一行为一个整数 n&…...

Windows查重工具,强烈推荐大家收藏!
我大家在用电脑的时候,是不是发现用得越久,电脑里的软件和文件就越多? 今天我给大家带来的这两款重复文件查找神器,简直就是电脑里的“清洁小能手”,能帮你把那些重复的文件和文件夹找出来。 Easy DupLicate Finder 重…...

使用Python快速接入DeepSeek API的步骤指南
使用Python快速接入DeepSeek API的步骤指南 1. 前期准备 注册DeepSeek账号 访问DeepSeek官网注册账号 完成邮箱验证等认证流程 获取API密钥 登录后进入控制台 → API管理 创建新的API Key并妥善保存 安装必要库 pip install requests # 可选:处理复杂场景 pip…...
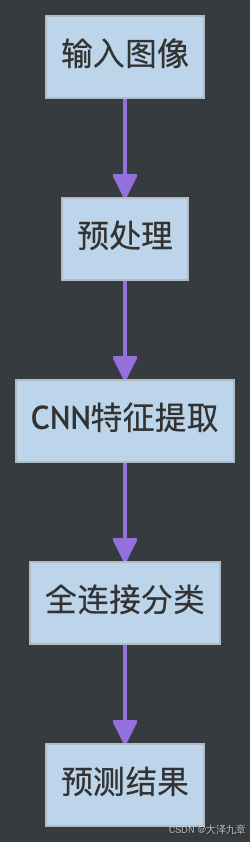
使用python完成手写数字识别
入门图像识别的第一个案例,看到好多小伙伴分享,也把自己当初的思路捋捋,写成一篇博客,作为记录和分享,也欢迎各位交流讨论。 实现思路 数据集:MNIST(包含60,000个训练样本和10,000个测试样本) 深度学习框架:Keras(基于TensorFlow) 模型架构:卷积神经网络(CNN) 实…...
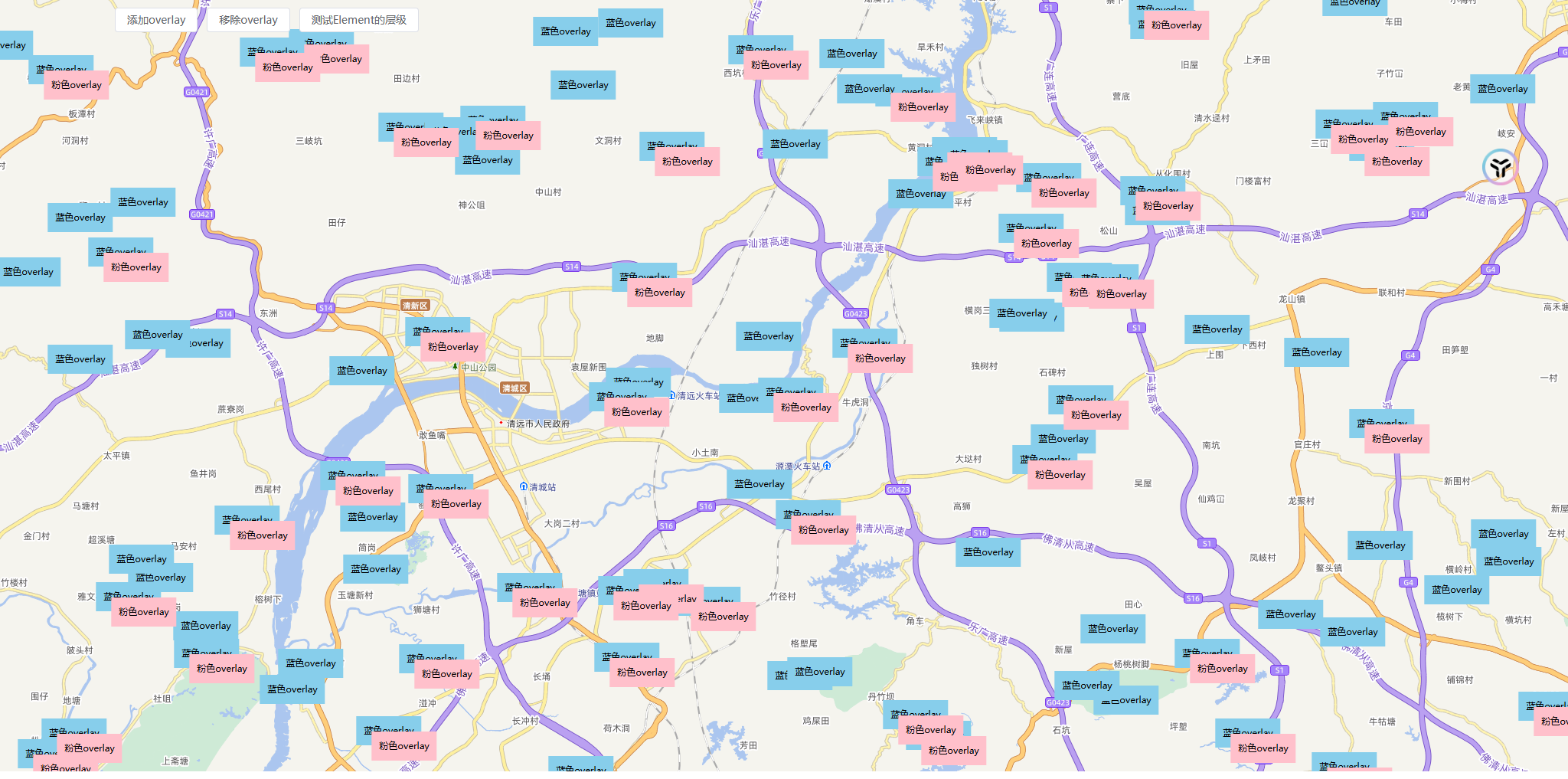
OpenLayers:如何控制Overlay的层级?
我最近在使用Overlay的时候遇到了一个问题,我向地图中添加了两种不同的Overlay(下图中的蓝色标牌和粉色标牌),我希望粉色标牌可以显示在最上层,可偏偏蓝色标牌却将其遮挡住了。于是我对Overlay的层级开始起了兴趣&…...

清晰易懂的 Flutter 卸载和清理教程
以下是为 Flutter 彻底卸载与清理教程,覆盖 Windows、macOS、Linux 系统,步骤清晰无残留,确保完全删除 Flutter SDK、依赖工具及 IDE 配置。 一、通用步骤:确认 Flutter 安装方式 Flutter 通常通过以下方式安装: 手动…...

docker-compose部署以及常用命令
一:常用命令 1.docker compose restart//重启 2.docker compose down// 停止 3.docker compose ps//列出 4.sudo docker-compose up -d 启动并且在后台运行 二:yaml配置文件 version: 3.5 services:etcd:container_name: milvus-etcdimage: quay.io/coreos/etcd:…...

《Golang高性能网络编程:构建低延迟服务器应用》
在本文中,我们将深入探讨Golang高性能网络编程,帮助您构建低延迟服务器应用。我们将介绍Golang的网络编程特性、优化技巧和实际案例,让您更好地理解和应用Golang在网络编程领域的优势。 高性能网络编程简介 什么是Golang高性能网络编程 高性能…...

非对称加密技术深度解析:从数学基础到工程实践
一、密码学范式革命:从对称到非对称 1.1 对称加密的局限性 传统对称加密算法(如AES、DES)采用共享密钥机制,加解密使用相同密钥。虽然计算效率优异(AES-256加密速度可达800MB/s),但在密钥分发环…...

Ubuntu 22.04/24.04 配置apt 源
前言 在 Ubuntu 系统部署与运维中,APT 源配置是保障软件安装效率与系统稳定性的核心环节。然而,随着 Ubuntu 24.04 LTS(Noble)的发布,其 APT 源配置格式与 22.04 LTS(Jammy)存在显著差异。 …...
数据结构C语言练习(设计循环队列)
一、循环队列简介 循环队列是一种线性数据结构,基于 FIFO(先进先出)原则,将队尾连接到队首形成循环。其核心优势是能复用队列之前用过的空间,避免普通队列 “假溢出” 问题。实现时,通常申请 k1 大小的数组…...
vscode代码片段的设置与使用
在 Visual Studio Code (VS Code) 中,可以通过自定义**代码片段(Snippets)**快速插入常用代码模板。以下是详细设置步骤: 步骤 1:打开代码片段设置 按下快捷键 Ctrl Shift P(Windows/Linux)或…...

在Vue中如何高效管理组件状态
在Vue中高效管理组件状态,可以采用以下几种策略: 使用Vuex进行状态管理: 对于复杂的应用,使用Vuex是一个非常有效的状态管理方案。Vuex提供了一个集中存储管理所有组件的状态,并以响应式的方式更新视图。它包括以下几个…...

uniapp -- 列表垂直方向拖拽drag组件
背景 需要在小程序中实现拖拽排序功能,所以就用到了m-drag拖拽组件,在开发的过程中,发现该组件在特殊的场景下会有些问题,并对其进行了拓展。 效果 组件代码 <template><!-- 创建一个垂直滚动视图,类名为m-drag --><scroll...
一款非常小的软件,操作起来非常丝滑!
今天我想给大家分享一款超级实用的小软件,它是一款电脑上用的倒计时和关机助手。 关机助手 帮你自动关机 这款关机助手特别小巧,完全不需要安装,文件大小才60KB,比一个小小的文件还小。你只需要把它下载下来,双击打开…...
FrameWork基础案例解析(四)
文章目录 单独拉取framework开机与开机动画横屏Android.mk语法单独编译SDKmake 忽略warning单独修改和编译Camera2单独编译Launcher3Android Studio 导入、修改、编译Settings导入 Android Studio 导入、修改、编译Launcher3android 开机默认进入指定Launcher植入自己的apk到系…...

嵌入式电量与功耗优化:从理论到实战
目录 一、为什么功耗是个大问题? 电池寿命的命门 效率决定竞争力 运营成本的隐形杀手 环保不是空话 二、功耗从哪来?硬件软件一个都跑不了 硬件:功耗的物理根源 处理器:耗电主力军 存储器:偷偷摸摸的耗电鬼 电源管理单元(PMU):幕后功臣也有损耗 时钟系统:滴…...

通过 C# 提取PDF文档中的图片
当 PDF 文件中包含有价值的图片,如艺术画作、设计素材、报告图表等,提取图片可以将这些图像资源进行单独保存,方便后续在不同的项目中使用,避免每次都要从 PDF 中查找。本文将介绍如何使用C#通过代码从PDF文档中提取图片ÿ…...
国标GB28181视频监控平台EasyCVR保驾护航休闲娱乐“九小场所”安全运营
凭借降低人力资源、节约物资成本的优势,在多个场景得到广泛应用。如今,棋牌室、洗浴中心、酒店这类人员频繁流动和密集的场所,已成为安全管理的重点。 尽管部分棋牌室已安装了监控设备,但是设备功能单一,只能实现一…...

GoLand 2024.3 中文 GO语言开发工具
GoLand 2024.3 中文 GO语言开发工具 文章目录 GoLand 2024.3 中文 GO语言开发工具一、介绍二、效果三、下载 一、介绍 JetBrains GoLand 2024 ,是一款GO语言开发工具,全行代码补全:能使用本地运行的上下文感知深度学习模型,可以自…...
学习笔记)
HTML 音频(Audio)学习笔记
一、HTML 音频概述 在 HTML 中,音频可以通过多种方式播放,但要确保音频在不同浏览器和设备上都能正常播放,需要掌握一些技巧。HTML5 引入了 <audio> 元素,为音频播放提供了一种标准方法,但在 HTML4 中ÿ…...
)
去中心化交易所(DEX)
核心概念与DEX类型 DEX vs CEX 中心化交易所(CEX)风险:资产托管风险(如2019年超2.9亿美元被盗)、隐私泄露(如50万用户信息泄漏)。 DEX优势:用户自持资产(非托管&#x…...

CentOS 7 强制升级Docker 24.x终极指南(解决MySQL8镜像兼容性问题)
CentOS 7 强制升级Docker 24.x终极指南(解决MySQL8镜像兼容性问题) 旧版本: 新版本docker: 一、问题背景与方案选型 1.1 典型报错分析 The designated data directory /var/lib/mysql/ is unusable根本原因:旧版…...