STM32单片机入门学习——第29节: [9-5] 串口收发HEX数据包串口收发文本数据包
写这个文章是用来学习的,记录一下我的学习过程。希望我能一直坚持下去,我只是一个小白,只是想好好学习,我知道这会很难,但我还是想去做!
本文写于:2025.04.09
STM32开发板学习——第29节: [9-5] 串口收发HEX数据包&串口收发文本数据包
- 前言
- 开发板说明
- 引用
- 解答和科普
- 一、串口收发HEX数据包
- 二、串口收发文本数据包
- 问题
- 总结
前言
本次笔记是用来记录我的学习过程,同时把我需要的困难和思考记下来,有助于我的学习,同时也作为一种习惯,可以督促我学习,是一个激励自己的过程,让我们开始32单片机的学习之路。
欢迎大家给我提意见,能给我的嵌入式之旅提供方向和路线,现在作为小白,我就先学习32单片机了,就跟着B站上的江协科技开始学习了.
在这里会记录下江协科技32单片机开发板的配套视频教程所作的实验和学习笔记内容,因为我之前有一个开发板,我大概率会用我的板子模仿着来做.让我们一起加油!
另外为了增强我的学习效果:每次笔记把我不知道或者问题在后面提出来,再下一篇开头作为解答!
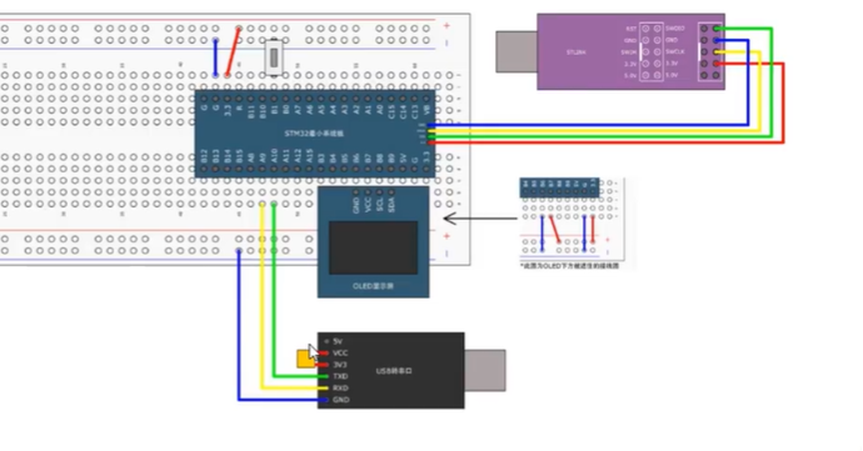
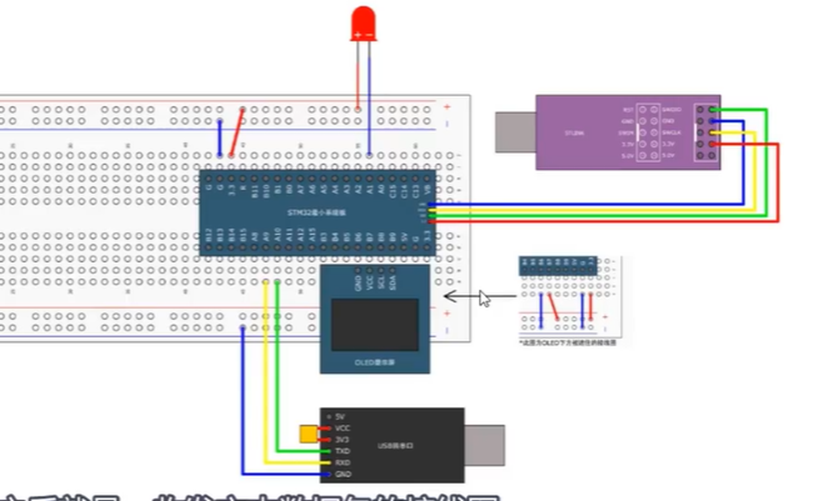
开发板说明
本人采用的是慧净的开发板,因为这个板子是我N年前就买的板子,索性就拿来用了。另外我也购买了江科大的学习套间。
原理图如下
1、开发板原理图

2、STM32F103C6和51对比

3、STM32F103C6核心板
视频中的都用这个开发板来实现,如果有资源就利用起来。另外也计划实现江协科技的套件。
下图是实物图

引用
【STM32入门教程-2023版 细致讲解 中文字幕】
还参考了下图中的书籍:
STM32库开发实战指南:基于STM32F103(第2版)

数据手册
解答和科普
一、串口收发HEX数据包
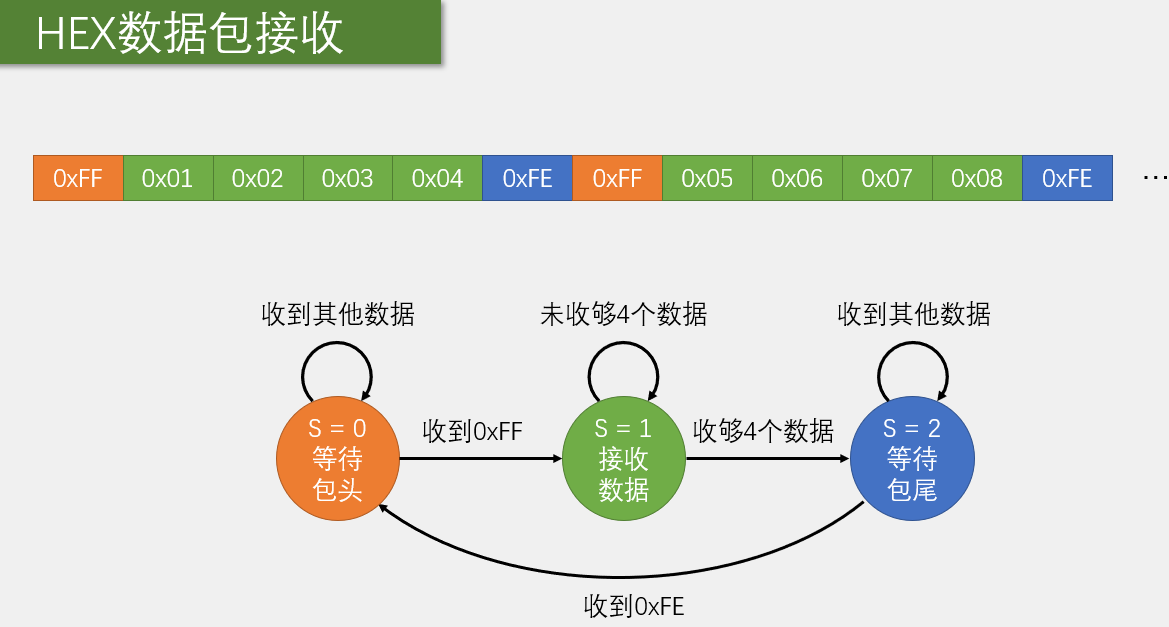
这这里,为了收发数据包,先定义两个缓冲区的数组,
uint8_t Serial_TxPacket[4];
uint8_t Serial_RxPacket[4];
uint8_t Serial_RxFlag; //如果收到数据包,就置位
先写一个SendPACKET的函数,调用一下这个函数,TxPacket数组的4个数据,就会自动加上包头包尾发送出去;
void Serial_SendPacket(void)
{Serial_SendByte(0xFF);Serial_SendArray(Serial_TxPacket,4);Serial_SendByte(0xFE);
}
extern uint8_t Serial_TxPacket[];
extern uint8_t Serial_RxPacket[];
数组声明的时候,数量可以不要,这个,如果模块里面有数组需要外部调用,这里就直接把变量声明出去了,如果要封装写个GET、Set的话,也是可以,那就得用指针进行传递,那样有点麻烦,这里就是直接声明出去;
Serial_TxPacket[0]=0x01;Serial_TxPacket[1]=0x02;Serial_TxPacket[2]=0x03;Serial_TxPacket[3]=0x04;Serial_SendPacket();
TxPacket数组的4个数据,就会自动加上包头包尾发送出去;

接收一个这样数据包的代码:
static uint8_t RxState=0;
这个静态变量类似于全局变量,函数进入只会初始化一次0,在函数退出后,数据仍然有效,与全局变量不同的是,静态变量只能在本函数使用,那我们就用这个RxState当做状态变量S,根据RxState的不同,我们需要进入不同的处理程序,
void USART1_IRQHandler(void)
{static uint8_t RxState=0;static uint8_t pRxPacket=0; //指示接收到哪一个了if(USART_GetITStatus(USART1,USART_IT_RXNE)==SET){uint8_t RxData=USART_ReceiveData(USART1); //获取数据字节if(RxState == 0){if(RxData == 0xFF){RxState =1;pRxPacket=0;}}else if(RxState==1){Serial_RxPacket[pRxPacket]=RxData;pRxPacket++;if(pRxPacket>=4){RxState=2;}}else if(RxState==2){if(RxData == 0xFE){RxState=0;Serial_RxFlag =1;}}USART_ClearITPendingBit(USART1,USART_IT_RXNE);}}
就是这个RxPacket数组,它是一个同事被写入又同时被读出的数组,在中断函数里,我们会依次写入它,在主函数,我们又会依次读取它,这会造成什么问题呢,就是数据包之间可能会混在一起,比如你读取的过程太慢了,前面两个数据刚读出来,等了一会,才继续往后读,那这时候后面的数据就可能会刷新为下一个数据包的数据,也就是你读取的数据可能属于上一个数据包,另一部分属于下一个数据包,
可以在接收部分加入判断,就是在每个数据包读取处理完毕后,再接受下一个数据包,有时候及时相邻数据包和你在一起也没关系,结合实际情况处理;
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "LED.h"
#include "Key.h"
#include "OLED.h"
#include "Serial.h"
#include "Key.h"uint8_t KeyNum;int main(void)
{OLED_Init();Serial_Init();Key_Init();OLED_ShowString(1,1,"TxPacket");OLED_ShowString(3,1,"RxPacket");Serial_TxPacket[0]=0x01;Serial_TxPacket[1]=0x02;Serial_TxPacket[2]=0x03;Serial_TxPacket[3]=0x04;// OLED_ShowString(1,1,"Hello STM32 MCU");while(1){KeyNum=Key_GetNum();if(KeyNum==1){Serial_TxPacket[0]++;Serial_TxPacket[1]++;Serial_TxPacket[2]++;Serial_TxPacket[3]++;Serial_SendPacket();OLED_ShowHexNum(2,1,Serial_TxPacket[0],2);OLED_ShowHexNum(2,4,Serial_TxPacket[1],2);OLED_ShowHexNum(2,7,Serial_TxPacket[2],2);OLED_ShowHexNum(2,10,Serial_TxPacket[3],2);}if(Serial_GetRxFlag()==1){OLED_ShowHexNum(4,1,Serial_RxPacket[0],2);OLED_ShowHexNum(4,4,Serial_RxPacket[1],2);OLED_ShowHexNum(4,7,Serial_RxPacket[2],2);OLED_ShowHexNum(4,10,Serial_RxPacket[3],2);}}
}Serial.CH
#include "stm32f10x.h" // Device header
#include "stdio.h"
#include "stdarg.h"uint8_t Serial_TxPacket[4];
uint8_t Serial_RxPacket[4];
uint8_t Serial_RxFlag; //如果收到数据包,就置位void Serial_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//开启时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure); GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure); USART_InitTypeDef USART_InitStructure;USART_InitStructure.USART_BaudRate=9600; //波特率USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None; //控制流USART_InitStructure.USART_Mode=USART_Mode_Tx |USART_Mode_Rx; //串口模式要想接收再|USART_InitStructure.USART_Parity=USART_Parity_No; //无校验位USART_InitStructure.USART_StopBits=USART_StopBits_1; //停止位1位USART_InitStructure.USART_WordLength=USART_WordLength_8b; //数据位8位USART_Init(USART1,&USART_InitStructure);USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel=USART1_IRQn ;NVIC_InitStructure.NVIC_IRQChannelCmd= ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;NVIC_Init(&NVIC_InitStructure);USART_Cmd(USART1,ENABLE); //开启
}void Serial_SendByte(uint8_t Byte) //发送一个字节
{USART_SendData(USART1,Byte);while (USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);}void Serial_SendArray(uint8_t *Array,uint16_t Length)
{uint16_t i;for(i=0;i<Length;i++){Serial_SendByte(Array[i]);}}void Serial_SendString(char *String)
{uint8_t i;for(i=0;String[i]!='\0';i++){Serial_SendByte(String[i]);}}
uint32_t Serial_Pow(uint32_t X,uint32_t Y)
{uint32_t Result=1;while (Y--){Result *=X;}return Result;}
void Serial_SendNumber(uint32_t Number,uint8_t Length)
{uint8_t i;for (i=0;i< Length;i++){Serial_SendByte(Number/Serial_Pow(10,Length-i-1)%10+'0');}}int fputc(int ch,FILE *f)
{Serial_SendByte(ch);return ch;
}void Serial_Printf(char *format,...)
{char String[100];va_list arg;va_start(arg,format);vsprintf(String, format ,arg);va_end(arg);Serial_SendString(String);}void Serial_SendPacket(void)
{Serial_SendByte(0xFF);Serial_SendArray(Serial_TxPacket,4);Serial_SendByte(0xFE);
}uint8_t Serial_GetRxFlag(void)
{if(Serial_RxFlag == 1){Serial_RxFlag=0;return 1;}return 0;
}void USART1_IRQHandler(void)
{static uint8_t RxState=0;static uint8_t pRxPacket=0; //指示接收到哪一个了if(USART_GetITStatus(USART1,USART_IT_RXNE)==SET){uint8_t RxData=USART_ReceiveData(USART1); //获取数据字节if(RxState == 0){if(RxData == 0xFF){RxState =1;pRxPacket=0;}}else if(RxState==1){Serial_RxPacket[pRxPacket]=RxData;pRxPacket++;if(pRxPacket>=4){RxState=2;}}else if(RxState==2){if(RxData == 0xFE){RxState=0;Serial_RxFlag =1;}}USART_ClearITPendingBit(USART1,USART_IT_RXNE);}}#ifndef __SERIAL_H
#define __SERIAL_H#include <stdio.h>extern uint8_t Serial_TxPacket[];extern uint8_t Serial_RxPacket[];void Serial_Init(void);
void Serial_SendString(char *String);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array,uint16_t Length);
void Serial_SendNumber(uint32_t Number,uint8_t Length);
void Serial_Printf(char *format,...);uint8_t Serial_GetRxFlag(void);
void Serial_SendPacket(void);#endif
实验现象
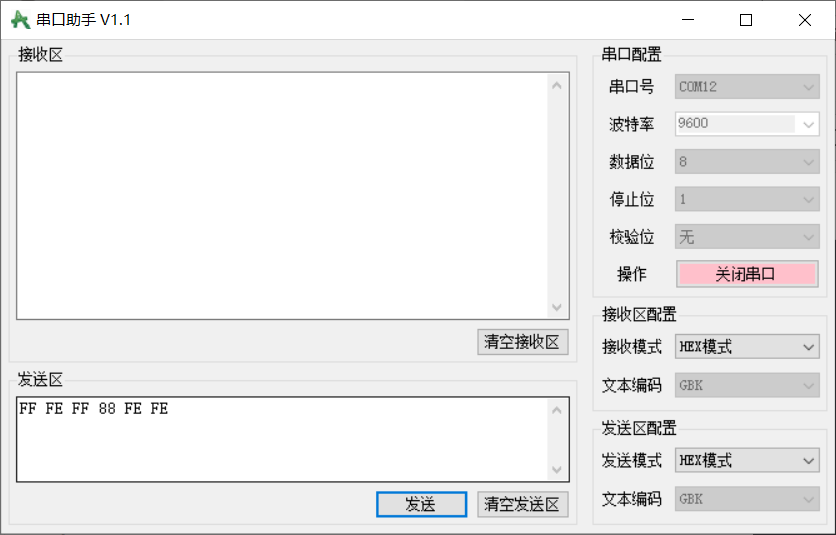
串口发送HEX数据包
二、串口收发文本数据包
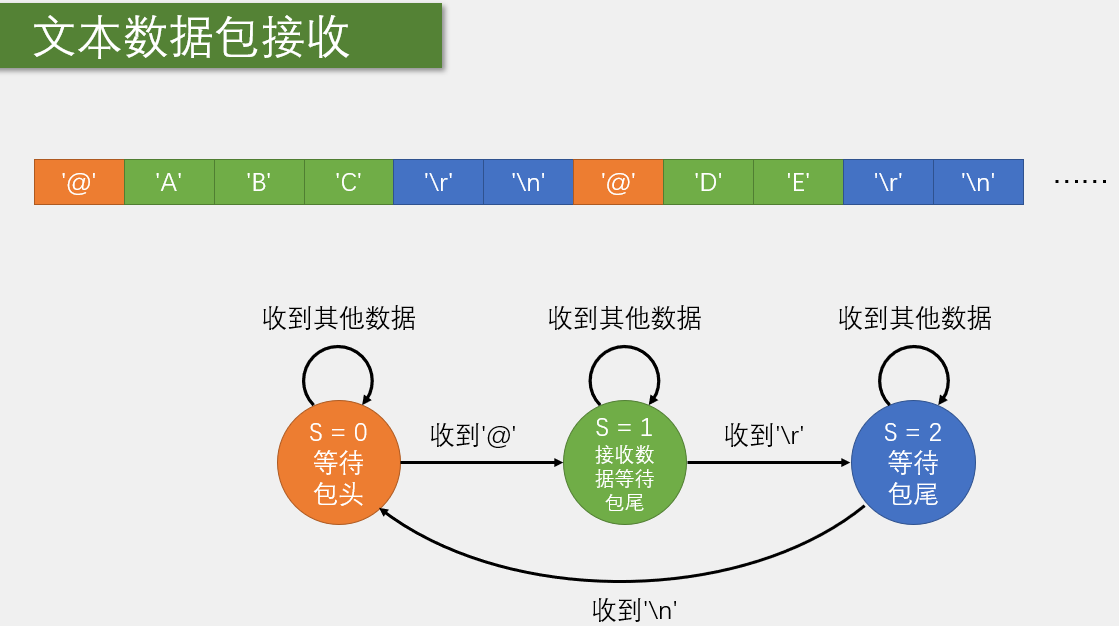
发送不是一个个的,所以发送就直接在主函数里SendString,或者printf就行了;
如果连续发送数据包,程序处理不及时,可能导致数据包错位,文本数据包,不存在连续,如果错位了,问题就比较大,所以等每次处理完成后,再开始接收下一个数据包,在这里就不使用读取Flag之后立刻清除的策略了,在中断等待包头的时候,再加一个条件,
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"
#include "LED.h"
#include "string.h"int main(void)
{OLED_Init();LED_Init();Serial_Init();OLED_ShowString(1, 1, "TxPacket");OLED_ShowString(3, 1, "RxPacket");while (1){if (Serial_RxFlag == 1){OLED_ShowString(4, 1, " ");OLED_ShowString(4, 1, Serial_RxPacket);if (strcmp(Serial_RxPacket, "LED_ON") == 0){LED1_ON();Serial_SendString("LED_ON_OK\r\n");OLED_ShowString(2, 1, " ");OLED_ShowString(2, 1, "LED_ON_OK");}else if (strcmp(Serial_RxPacket, "LED_OFF") == 0){LED1_OFF();Serial_SendString("LED_OFF_OK\r\n");OLED_ShowString(2, 1, " ");OLED_ShowString(2, 1, "LED_OFF_OK");}else{Serial_SendString("ERROR_COMMAND\r\n");OLED_ShowString(2, 1, " ");OLED_ShowString(2, 1, "ERROR_COMMAND");}Serial_RxFlag = 0;}}
}#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>char Serial_RxPacket[100]; //"@MSG\r\n"
uint8_t Serial_RxFlag;void Serial_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);USART_InitTypeDef USART_InitStructure;USART_InitStructure.USART_BaudRate = 9600;USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;USART_InitStructure.USART_Parity = USART_Parity_No;USART_InitStructure.USART_StopBits = USART_StopBits_1;USART_InitStructure.USART_WordLength = USART_WordLength_8b;USART_Init(USART1, &USART_InitStructure);USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);USART_Cmd(USART1, ENABLE);
}void Serial_SendByte(uint8_t Byte)
{USART_SendData(USART1, Byte);while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}void Serial_SendArray(uint8_t *Array, uint16_t Length)
{uint16_t i;for (i = 0; i < Length; i ++){Serial_SendByte(Array[i]);}
}void Serial_SendString(char *String)
{uint8_t i;for (i = 0; String[i] != '\0'; i ++){Serial_SendByte(String[i]);}
}uint32_t Serial_Pow(uint32_t X, uint32_t Y)
{uint32_t Result = 1;while (Y --){Result *= X;}return Result;
}void Serial_SendNumber(uint32_t Number, uint8_t Length)
{uint8_t i;for (i = 0; i < Length; i ++){Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');}
}int fputc(int ch, FILE *f)
{Serial_SendByte(ch);return ch;
}void Serial_Printf(char *format, ...)
{char String[100];va_list arg;va_start(arg, format);vsprintf(String, format, arg);va_end(arg);Serial_SendString(String);
}void USART1_IRQHandler(void)
{static uint8_t RxState = 0;static uint8_t pRxPacket = 0;if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET){uint8_t RxData = USART_ReceiveData(USART1);if (RxState == 0){if (RxData == '@' && Serial_RxFlag == 0){RxState = 1;pRxPacket = 0;}}else if (RxState == 1){if (RxData == '\r'){RxState = 2;}else{Serial_RxPacket[pRxPacket] = RxData;pRxPacket ++;}}else if (RxState == 2){if (RxData == '\n'){RxState = 0;Serial_RxPacket[pRxPacket] = '\0';Serial_RxFlag = 1;}}USART_ClearITPendingBit(USART1, USART_IT_RXNE);}
}实验现象
串口发送文本数据包
问题
总结
本节课主要是串口数据包的代码编写,主要是对数据包如何处理,另外可以对extern对变量,可以外部调用,当然重要的是状态机的编写,不同的状态执行不同的任务,还有任务如何转运。
相关文章:
STM32单片机入门学习——第29节: [9-5] 串口收发HEX数据包串口收发文本数据包
写这个文章是用来学习的,记录一下我的学习过程。希望我能一直坚持下去,我只是一个小白,只是想好好学习,我知道这会很难,但我还是想去做! 本文写于:2025.04.09 STM32开发板学习——第29节: [9-5] 串口收发HEX数据包&串口收发文本数据包 前…...

【Springboot知识】Springboot进阶-Micrometer指标监控深入解析
文章目录 Micrometer 核心概念与标准指标详解**Micrometer 核心概念与标准指标详解****一、Micrometer 核心概念****二、Micrometer 标准指标****1. JVM 监控指标****2. 系统资源监控****3. HTTP 请求监控****4. 数据库监控****5. 缓存监控** **三、配置与自定义指标****1.…...
Skyline配置指南-微信小程序
Skyline 是微信小程序推出的新一代渲染引擎,提供了更强大的渲染能力和更流畅的性能体验。以下是配置 Skyline 的详细步骤: 一、app.json文件配置 "componentFramework": "glass-easel", "lazyCodeLoading": "requi…...

Go 微服务框架 | 中间件
文章目录 定义中间件前置中间件后置中间件路由级别中间件 定义中间件 中间件的作用是给应用添加一些额外的功能,但是不会影响原有应用的编码方式,想用的时候直接添加,不想用的时候也可以轻松去除,实现所谓的可插拔。中间件的实现…...
Spring MVC 重定向(Redirect)详解
Spring MVC 重定向(Redirect)详解 1. 核心概念与作用 重定向(Redirect) 是 Spring MVC 中一种客户端重定向机制,通过 HTTP 302 状态码(默认)将用户浏览器重定向到指定 URL。 主要用途…...

项目开发流程总结
目录 1. 项目启动阶段(需求分析) 2. 项目设计阶段 3. 开发阶段 4. 测试阶段 5. 打包和发布阶段 6. 运维和监控阶段 7. 版本迭代和维护阶段 项目生命周期中的管理要点: 总结: 一个完整的项目开发流程通常包括以下几个阶段…...

window上 docker使用ros2开发并usbip共享usb设备
曾经参考 https://blog.csdn.net/laoxue123456/article/details/138339029 来共享windows上的usb 发现没有办法成功总是出现 tcp 错误。telnet测试能够正常连接 很是奇怪,window上换成低版本的usbipd仍然是同样的错误,没有办法的情况下参考了docker官方文…...

基于MATLAB/simulink的信号调制仿真--AM调制
实验内容: 假设y(t)(20.5*2cos(2*pi*1000*t))*5cos(2*pi*2*1e4*t)调幅系统,请将一个频率为1000HZ的余弦波信号,通过进行AM调制,载波信号频率为20kHZ的余弦波,调制度ma0.…...

Vue3+Ts封装ToolTip组件(2.0版本)
本组件支持hover和click两种触发方式,需要更多的触发方式,可自行去扩展!!! 1.传递三个参数: content:要展示的文本 position:文本出现的位置("top" | "t…...
Latex语法入门之数学公式
Latex是一种高质量的排版系统,尤其擅长于数学公式的排版。本文我将带大家深入了解Latex在数学公式排版中的应用。从基础的数学符号到复杂的公式布局,我们都会一一讲解,通过本文的学习,你将能够轻松编写出清晰、美观的数学公式&…...
shell脚本 - Linux定时温度监控-软硬件检测 - 服务器温度监控 - 写入日志
效果图 脚本 vi auto.sh (chmod x ./auto.sh) #!/bin/bash # 按照日期创建一个文件或目录 https://blog.csdn.net/shoajun_5243/article/details/83539069 datetimedate %Y%m%d-%H%M%S |cut -b1-20 dirpath/systemMonitor/$datetime file1$dirpath/sensors.log file2$dirpa…...
Linux驱动开发进阶(六)- 多线程与并发
文章目录 1、前言2、进程与线程3、内核线程4、底半步机制4.1、软中断4.2、tasklet4.3、工作队列4.3.1、普通工作项4.3.2、延时工作项4.3.3、工作队列 5、中断线程化6、进程6.1、内核进程6.2、用户空间进程 7、锁机制7.1、原子操作7.2、自旋锁7.3、信号量7.4、互斥锁7.5、comple…...

买不起了,iPhone 或涨价 40% ?
周知的原因,新关税对 iPhone 的打击,可以说非常严重。 根据 Rosenblatt Securities分析师的预测,若苹果完全把成本转移给消费者。 iPhone 16 标配版的价格,可能上涨43%。 iPhone 16 标配的价格是799美元,上涨43%&am…...

Axure 列表滚动:表头非常多(横向滚动方向)、分页(纵向滚动) | 基于动态面板的滚动方向和取消调整大小以适合内容两个属性进行实现
文章目录 引言I 列表滚动的操作说明see also共享原型引言 Axure RP9教程 【数据传输】(页面值传递)| 作用域 :全局变量、局部变量 https://blog.csdn.net/z929118967/article/details/147019839?spm=1001.2014.3001.5501 基于动态面板的滚动方向和取消调整大小以适合内容两…...

RBAC 权限控制:深入到按钮级别的实现
RBAC 权限控制:深入到按钮级别的实现 一、前端核心思路 1. 大致实现思路 后端都过SELECT连表查询把当前登录的用户对应所有的权限返回过来,前端把用户对应所有的权限 存起来to(vuex/pinia) 中 ,接着前端工程师需要知道每个按钮对应的权限代…...

大模型格式化输出的几种方法
大模型格式化输出的几种方法 在开发一些和LLM相关的应用的时候,如何从大模型的反馈中拿到结构化的输出数据是非常重要的,那么本文就记录几种常用的方法。 OpenAI提供的新方法 在 OpenAI 的 Python 库中,client.beta.chat.completions.parse 是一个用于生成结构化输出的方法…...

【区间贪心】合并区间 / 无重叠区间 / 用最少数量的箭引爆气球 / 俄罗斯套娃信封问题
⭐️个人主页:小羊 ⭐️所属专栏:贪心算法 很荣幸您能阅读我的文章,诚请评论指点,欢迎欢迎 ~ 目录 合并区间无重叠区间用最少数量的箭引爆气球俄罗斯套娃信封问题 合并区间 合并区间 class Solution { public:vector<vecto…...
)
JBDC java数据库连接(2)
目录 JBDC建立 获得PrepareStatement执行sql语句 形式: PrepareStatement中的方法: 实例 PreparedStatement和Statement 基于以下的原因: JBDC建立 获得PrepareStatement执行sql语句 在sql语句中参数位置使用占位符,使用setXX方法向sql中设置参数 形式&…...

es --- 集群数据迁移
目录 1、需求2、工具elasticdump2.1 mac安装问题解决 2.2 elasticdump文档 3、迁移 1、需求 迁移部分新集群没有的索引和数据 2、工具elasticdump Elasticdump 的工作原理是将输入发送到输出 。两者都可以是 elasticsearch URL 或 File 2.1 mac安装 前置:已经安装…...
)
Redis高频面试题及深度解析(20大核心问题+场景化答案)
摘要:Redis作为高性能缓存与内存数据库,是后端开发的核心技术栈之一。本文整理20大高频Redis面试题,结合真实场景与底层源码逻辑,助你彻底掌握Redis核心机制。涵盖单线程模型、集群方案、分布式锁、持久化等核心知识点。 一、Redi…...

事件处理程序
事件处理程序 一、事件处理程序的定义 事件处理程序是一段代码,用于响应特定的事件。在网页开发中,事件是在文档或浏览器窗口中发生的特定交互瞬间,如用户点击按钮、页面加载完成等。事件处理程序则是针对这些事件执行的函数,它能…...

stable diffusion部署ubuntu
stable-diffusion webui: https://github.com/AUTOMATIC1111/stable-diffusion-webui python3.10 -m venv venv(3.11的下torch会慢得要死) source venv/bin/activate 下载checkpoint模型放入clip_version"/home/chen/软件/stable-diffusion-webu…...

Qt的window注册表读写以及删除
Qt的window注册表读写以及删除 1. 使用 QSettings(Qt推荐方式)基本操作关键点限制 2. 调用Windows原生API示例:创建/读取键值常用API注意事项 3. 高级场景(1) 递归删除键(2) 注册表权限修改 4. 安全性建议总结其他QT文章推荐 在Qt中操作Windo…...

聊一聊接口测试时遇到上下游依赖时该如何测试
目录 一、手工测试时的处理方法 1.1沟通协调法 1.2模拟数据法 二、自动化测试时的处理方法 2.1 数据关联法(变量提取) 2.2 Mock数据法 2.3自动化框架中的依赖管理 三、实施示例(以订单接口测试为例) 3.1Mock依赖接口&…...
)
C++ 排序(1)
以下是一些插入排序的代码 1.插入排序 1.直接插入排序 // 升序 // 最坏:O(N^2) 逆序 // 最好:O(N) 顺序有序 void InsertSort(vector<int>& a, int n) {for (int i 1; i < n; i){int end i - 1;int tmp a[i];// 将tmp插入到[0,en…...
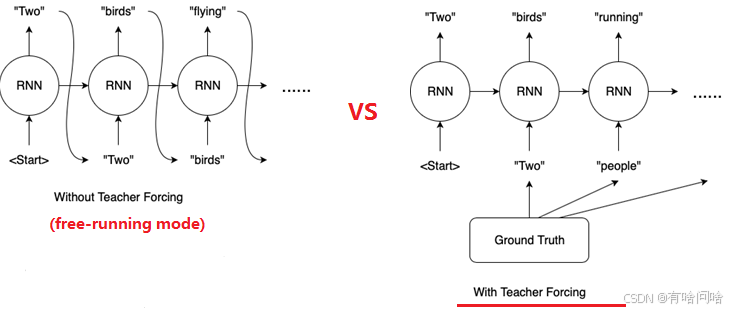
【有啥问啥】深入浅出讲解 Teacher Forcing 技术
深入浅出讲解 Teacher Forcing 技术 在序列生成任务(例如机器翻译、文本摘要、图像字幕生成等)中,循环神经网络(RNN)以及基于 Transformer 的模型通常采用自回归(autoregressive)的方式生成输出…...
zk基础—zk实现分布式功能
1.zk实现数据发布订阅 (1)发布订阅系统一般有推模式和拉模式 推模式:服务端主动将更新的数据发送给所有订阅的客户端。 拉模式:客户端主动发起请求来获取最新数据(定时轮询拉取)。 (2)zk采用了推拉相结合来实现发布订阅 首先客户端需要向服务端注册自己关…...

mySQL数据库和mongodb数据库的详细对比
以下是 MySQL 和 MongoDB 的详细对比,涵盖优缺点及适用场景: 一、核心特性对比 特性MySQL(关系型数据库)MongoDB(文档型 NoSQL 数据库)数据模型结构化表格,严格遵循 Schema灵活的文档模型&…...
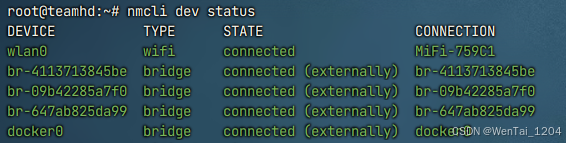
ubuntu wifi配置(命令行版本)
1、查询当前设备环境的wifi列表 nmcli dev wifi list2、连接wifi nmcli dev wifi connect "MiFi-SSID" password "Password" #其中MiFi-SSID是wifi的密码,Password是wifi的密码3、查看连接情况 nmcli dev status...

Docker与Kubernetes在ZKmall开源商城容器化部署中的应用
ZKmall开源商城作为高并发电商系统,其容器化部署基于DockerKubernetes技术栈,实现了从开发到生产环境的全流程标准化与自动化。以下是核心应用场景与技术实现: 一、容器化基础:Docker镜像与微服务隔离 服务镜像标准化 分层构建…...