ISP--Demosaicking
文章目录
- 前言
- 算法解释
- 简单的线性插值
- 代码实现
- 色差法和色比法
- 基于方向加权的方法
- RB缺失的G通道的插值
- RB缺失的BR的插值
- G缺失的BR的插值
- 代码实现
- 基于边缘检测的方法
- 计算缺失的G
- 计算缺失的RB值/计算缺失的G值
前言
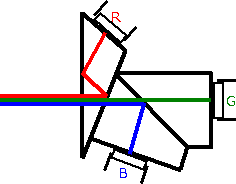
人眼之所以有能感受到自然界的颜色,是因为人眼的感光细胞中有三种锥体细胞对红绿蓝三种颜色敏感,所以我们就可以通过RGB三种颜色来表示一个颜色空间,通过这个颜色空间中的点就能表示自然界中所有的颜色。那么数码相机只要能类似人一样获取自然界中的这三个分量,那么就能复现人眼看到的颜色。相机系统用的感光器件只是一个光电转换器件,所以感光器件只对亮度分量敏感,无法感知颜色,所以需要通过滤光片将光线分解成RGB三个分量然后再用感光器件去接受。那么最直接的方式就是用三个滤光片分别过滤出RGB三个通道的分量,然后用三个感光器件去分别接受三个通道的强度,然后再将这三个通道的值叠加到一起就能复现出正常的颜色。这种设计称为3CCD,这种方式大概可以用如下简图表示。但是这种方式工艺复杂且成本较高,所以到目前位置在消费领域基本没有这种操作。
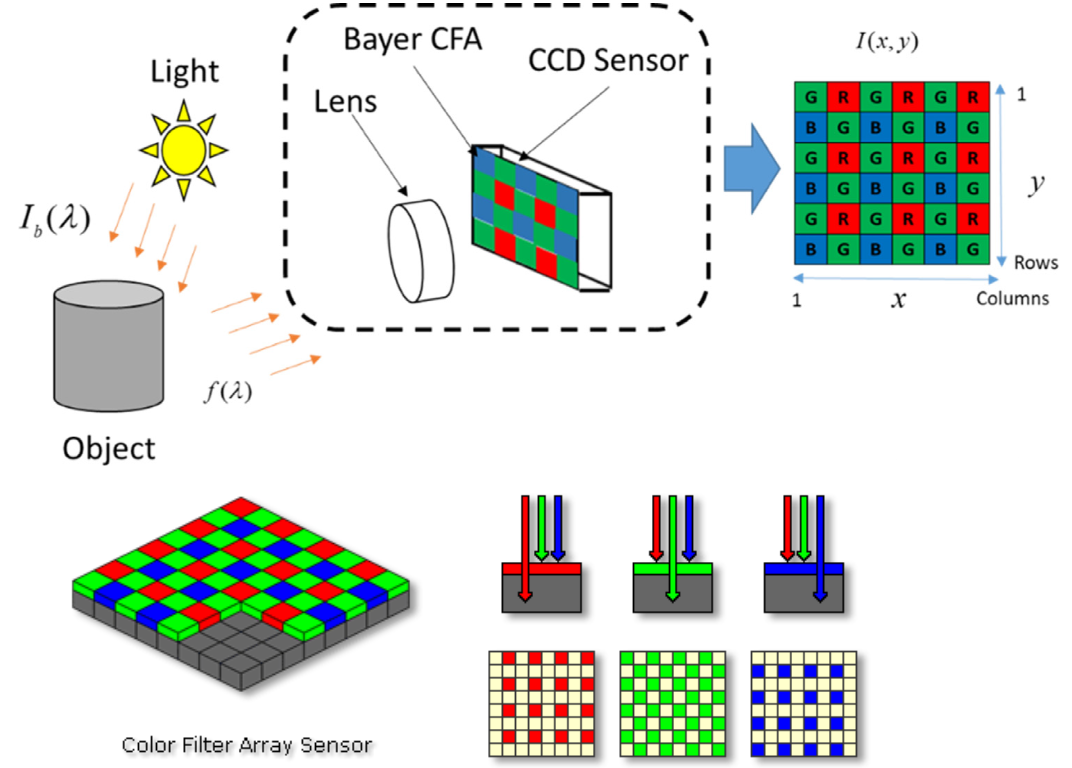
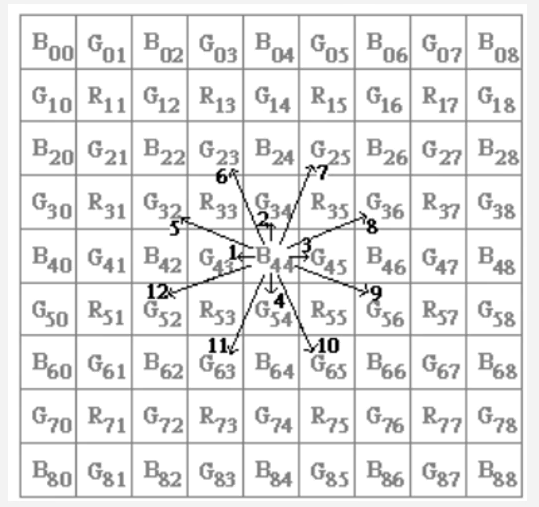
由于其缺陷,所以柯达公司的科学家Bryce Bayer(1929-2012)发明了一个突破性的解决方案。这个方案不需要使用昂贵的光学棱镜,也不需要使用3个CCD阵列,只需要在一个CCD阵列上制造三种不同的滤光膜,构成一个滤光膜阵列(Color Filter Array,CFA),就形成一个廉价而高效的解决方案。这种方式就是在感光器件上面通过交替的滤光透镜过滤出三中颜色分量形成如图的RGB三色交替的图像。因为自然界中绿色占比较大,所以给G分配了两个位置。这样每个像素点就只有一种颜色,那如何得到每个像素点的所有颜色呢?所以就有了去马赛克算法:后期再通过一定的算法通过周边的颜色恢复出确实的颜色,最终形成RGB的颜色,这种后期的处理方式就是本文讨论的重点,它实现了把图像从raw域转换到了rgb域。
参考:Demosiac 去马赛克 (CIP)
算法解释
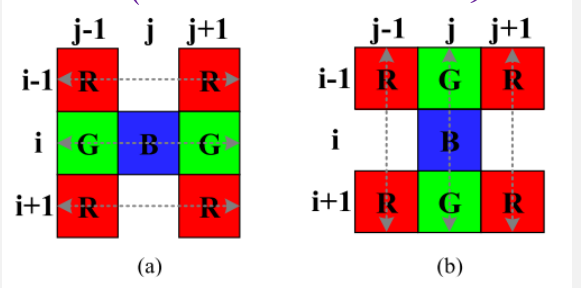
简单的线性插值
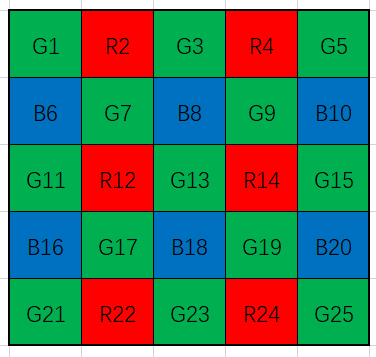
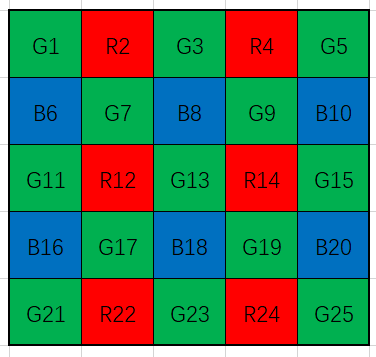
如图是Bayer格式的raw图,RGB三种颜色交替覆盖,且绿色分量是RB分量的两倍。由于这种特殊的分布方式,所以可以通过最简单的线性插值的方式通过附近已知的颜色插值出同一通道缺失的分量。例如途中G13点为绿色,缺失了R和B,但是G13点为绿色,但是G13左右的R是已知的,那么就可以通过左右红色分量插值出该点缺失的红色,同理可以通过上下的蓝色分量插值出缺失的蓝色分量。对于R14缺失的G和B,但是周围相邻的有4个G是已知的,就可以通过这四个点插值出该点缺失的G,同理可以通过周围四个B插值出该点的B。
代码实现
%% --------------------------------
%% fuction: main file of Demosaic. The simple linear interpolation.
%% note: add RGGB format only, other formats will be added later
%% --------------------------------
clc;clear;close all;%% ------------Raw Format----------------
filePath = 'images/kodim19_8bits_RGGB.raw';
bayerFormat = 'RGGB';
width = 512;
height= 768;
bits = 8;
%% --------------------------------------
bayerData = readRaw(filePath, bits, width, height);
figure();
imshow(bayerData);
title('raw image');%% expand image inorder to make it easy to calculate edge pixels
bayerPadding = zeros(height + 2,width+2);
bayerPadding(2:height+1,2:width+1) = uint32(bayerData);
bayerPadding(1,:) = bayerPadding(3,:);
bayerPadding(height+2,:) = bayerPadding(height,:);
bayerPadding(:,1) = bayerPadding(:,3);
bayerPadding(:,width+2) = bayerPadding(:,width);%% main code of imterpolation
imDst = zeros(height+2, width+2, 3); %创建三通道图像
for ver = 2:height + 1for hor = 2:width + 1switch bayerFormatcase 'RGGB'% G B -> R if(0 == mod(ver, 2) && 0 == mod(hor, 2)) imDst(ver, hor, 1) = bayerPadding(ver, hor); %直接填充红色通道% G -> R 求均值,插值imDst(ver, hor, 2) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor) +...bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/4;% B -> RimDst(ver, hor, 3) = (bayerPadding(ver-1, hor-1) + bayerPadding(ver-1, hor+1) + ...bayerPadding(ver+1, hor-1) + bayerPadding(ver+1, hor+1))/4; % G R -> Belseif (1 == mod(ver, 2) && 1 == mod(hor, 2)) imDst(ver, hor, 3) = bayerPadding(ver, hor);% G -> BimDst(ver, hor, 2) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor) +...bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/4;% R -> BimDst(ver, hor, 1) = (bayerPadding(ver-1, hor-1) + bayerPadding(ver-1, hor+1) + ...bayerPadding(ver+1, hor-1) + bayerPadding(ver+1, hor+1))/4; elseif(0 == mod(ver, 2) && 1 == mod(hor, 2))imDst(ver, hor, 2) = bayerPadding(ver, hor);% R -> GrimDst(ver, hor, 1) = (bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/2;% B -> GrimDst(ver, hor, 3) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor))/2;elseif(1 == mod(ver, 2) && 0 == mod(hor, 2))imDst(ver, hor, 2) = bayerPadding(ver, hor);% B -> GbimDst(ver, hor, 3) = (bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/2;% R -> GbimDst(ver, hor, 1) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor))/2;endcase 'GRBG'continue;case 'GBGR'continue;case 'BGGR'continue;endend
end
imDst = uint8(imDst(2:height+1,2:width+1,:));
figure,imshow(imDst);title('demosaic image');orgImage = imread('images/kodim19.png');
figure, imshow(orgImage);title('org image');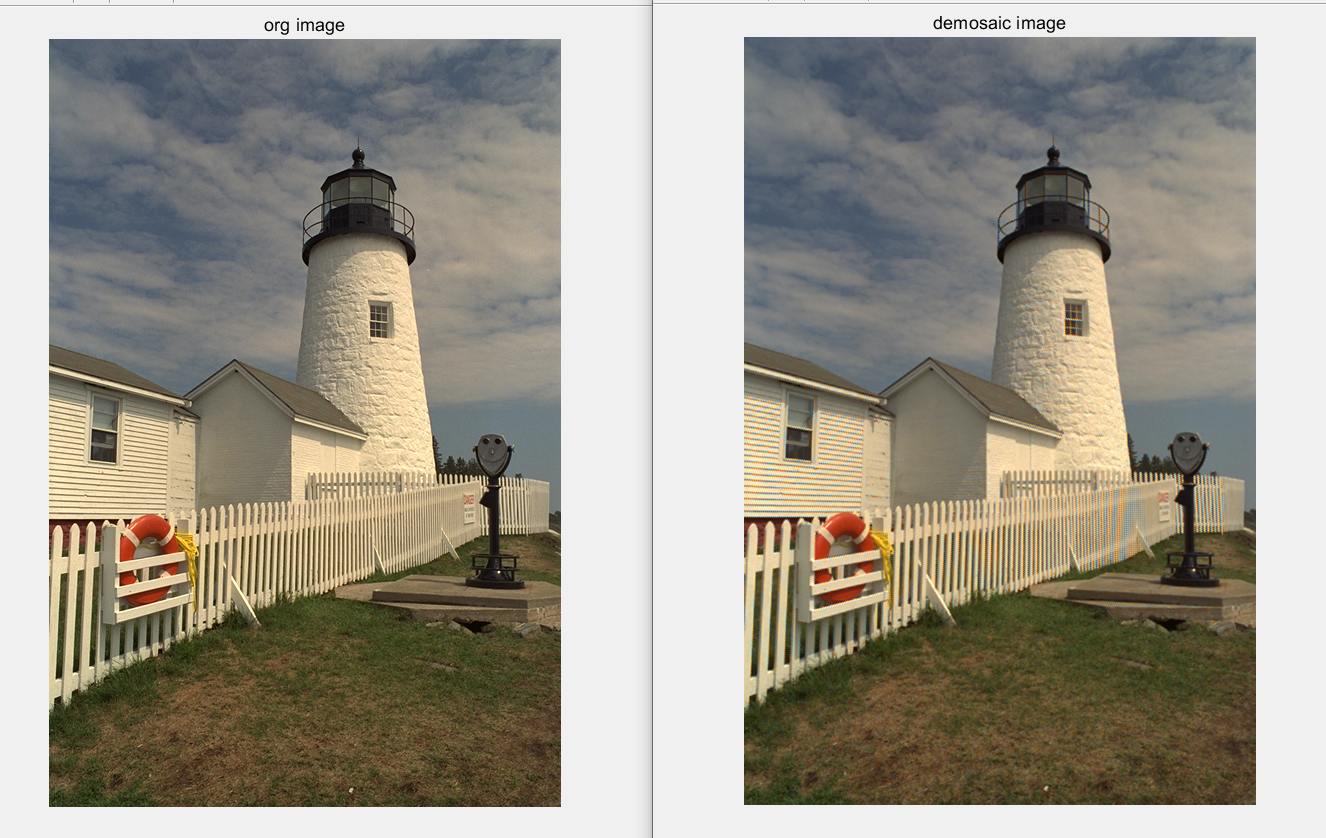
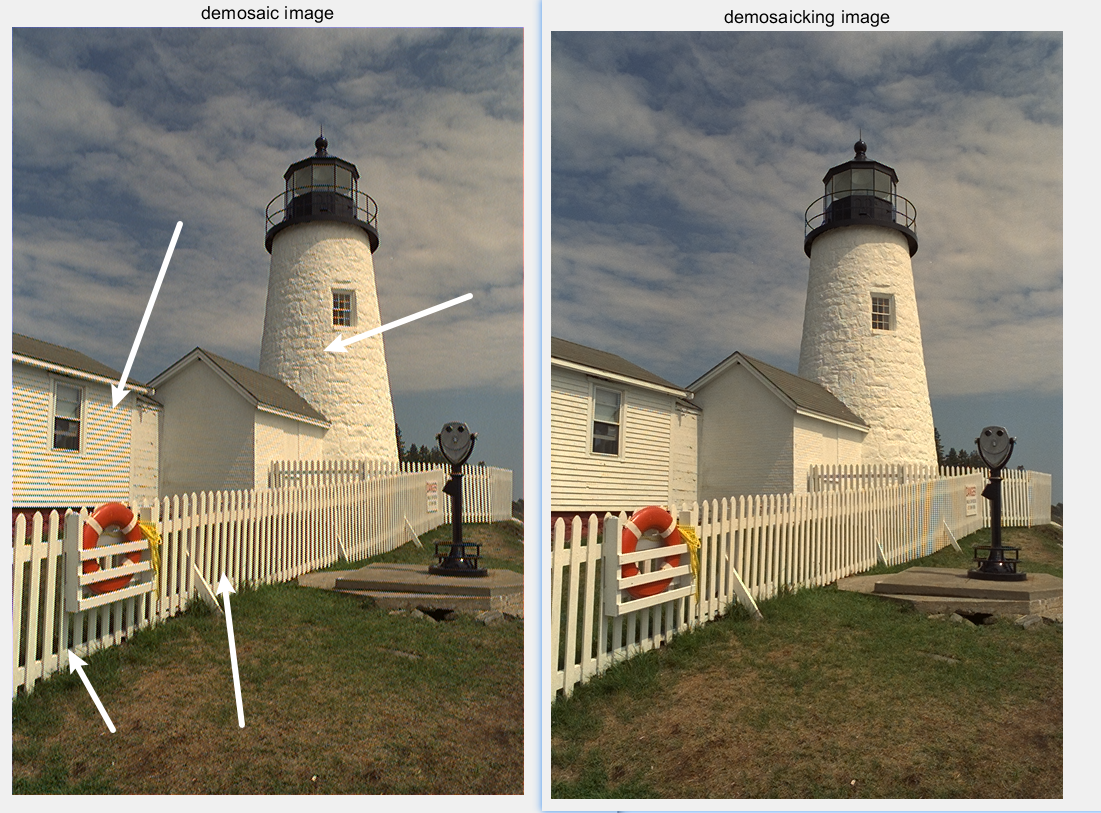
左侧是实验原图,右侧是通过上述的简单的线性插值出来的效果,从图中可以看出简单的线性插值出来得到效果一般。存在画面整体清晰度变差,高频存在伪彩,边缘又伪像。
色差法和色比法
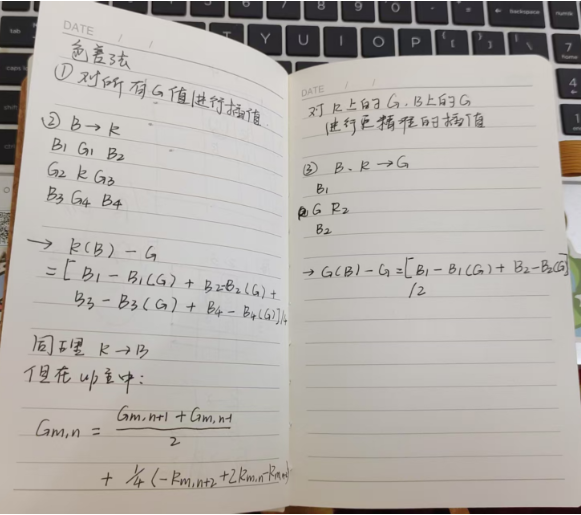
色差法和色比法其实是基于两个假设实现插值的。**色差恒定认为在一定范围内入射光和法线是比较接近的,因此可以认为在一定范围内的相邻点像素之间符合R-G或者B-G是相等的,由此产生了色差恒定的假设。**其中色比法假设在一个邻域范围内不同颜色通道的比值是固定的,简单来说就是相邻像素的R/G的值和B/G的值是一样的,那么设计算法时就可以利用这一点。一般情况下都会先插值出G的缺失值,然后通过与G的比值恒定插值出其他的缺失值。如上展示的RAW图,可以通过G9,G13, G15,G19做简单的线性插值恢复G14,然后通过R14/G14 = R13/G13的假设恢复出R13。同理可以恢复出其他缺失的颜色。
色差法和色比法类似,色差法假设在一个邻域内不同通道的颜色插值时恒定的。只是将色比法的比值转换为差值即可。
具体流程,这里我直接手绘了:
原理参考:https://zhuanlan.zhihu.com/p/592335382
代码实现:
%% --------------------------------
%% fuction: main file of Demosaic. The simple linear interpolation.
%% note: add RGGB format only, other formats will be added later
%% --------------------------------
clc;clear;close all;%% ------------Raw Format----------------
filePath = 'images/kodim19_8bits_RGGB.raw';
bayerFormat = 'RGGB';
width = 512;
height= 768;
bits = 8;
%% --------------------------------------
bayerData = readRaw(filePath, bits, width, height);
figure();
imshow(bayerData);
title('raw image');%% expand image inorder to make it easy to calculate edge pixels
bayerPadding = zeros(height + 4, width + 4);
bayerPadding(3:height+2, 3:width+2) = uint32(bayerData);% 正确镜像填充(上下方向)
bayerPadding(1:2, 3:width+2) = bayerPadding(5:-1:4, 3:width+2); % 顶部镜像原图第3-4行
bayerPadding(height+3:height+4, 3:width+2) = bayerPadding(height+1:-1:height, 3:width+2); % 底部镜像% 正确镜像填充(左右方向)
bayerPadding(3:height+2, 1:2) = bayerPadding(3:height+2, 5:-1:4); % 左侧镜像
bayerPadding(3:height+2, width+3:width+4) = bayerPadding(3:height+2, width+1:-1:width); % 右侧镜像%% main code of imterpolation
imDst = zeros(height+4, width+4, 3); %创建三通道图像
for ver = 3:height + 2for hor = 3:width + 2Dh = bayerPadding(ver-1, hor)+bayerPadding(ver+1, hor);Dv = bayerPadding(ver, hor+1)+bayerPadding(ver, hor-1);switch bayerFormatcase 'RGGB'% Rif(1 == mod(ver, 2) && 1 == mod(hor, 2)) imDst(ver, hor, 1) = bayerPadding(ver, hor); %直接填充红色通道% G -> R 求均值,插值R上的GimDst(ver, hor, 2) = (Dv+Dh)/4;% B通道elseif (0 == mod(ver, 2) && 0 == mod(hor, 2)) imDst(ver, hor, 3) = bayerPadding(ver, hor);% G -> B 插值B上的GimDst(ver, hor, 2) = (Dv+Dh)/4; elseif(1 == mod(ver, 2) && 0 == mod(hor, 2))imDst(ver, hor, 2) = bayerPadding(ver, hor); elseif(0 == mod(ver, 2) && 1 == mod(hor, 2))imDst(ver, hor, 2) = bayerPadding(ver, hor); endendend
end
for ver = 3:height + 2for hor = 3:width+2Dh = bayerPadding(ver-1, hor)+bayerPadding(ver+1, hor);switch bayerFormatcase 'RGGB'%R通道if(1==mod(ver,2)&&(1==mod(hor,2)))%更新R上的G,插值R上的B:imDst(ver,hor,2) = (2*bayerPadding(ver, hor)-bayerPadding(ver, hor-2)-bayerPadding(ver, hor+2))/4 + Dh/2;imDst(ver,hor,3) = imDst(ver, hor, 2) +( -imDst(ver-1, hor-1, 2) + bayerPadding(ver-1, hor-1) -imDst(ver-1, hor+1, 2)+ bayerPadding(ver-1, hor+1)-...
imDst(ver+1, hor-1, 2) +bayerPadding(ver+1, hor-1) -imDst(ver+1, hor+1, 2) +bayerPadding(ver+1, hor+1) )/4;%B通道elseif(0==mod(ver,2)&&0==mod(hor,2))imDst(ver,hor,2) = (2*bayerPadding(ver, hor)-bayerPadding(ver, hor-2)-bayerPadding(ver, hor+2))/4 + Dh/2;imDst(ver, hor, 1) = imDst(ver, hor, 2) +( -imDst(ver-1, hor-1, 2) + bayerPadding(ver-1, hor-1) -imDst(ver-1, hor+1, 2)+ bayerPadding(ver-1, hor+1)-...
imDst(ver+1, hor-1, 2) +bayerPadding(ver+1, hor-1) -imDst(ver+1, hor+1, 2) +bayerPadding(ver+1, hor+1) )/4;elseif(1==mod(ver,2)&&0==mod(hor,2))imDst(ver, hor, 1) = imDst(ver,hor,2)+ ( bayerPadding(ver, hor-1)- imDst(ver, hor-1, 2) - imDst(ver, hor+1, 2) + bayerPadding(ver, hor+1) )/2;imDst(ver, hor, 3) = imDst(ver,hor,2) + ( bayerPadding(ver-1, hor)- imDst(ver-1, hor, 2) - imDst(ver+1, hor, 2) + bayerPadding(ver+1, hor) )/2;elseif(0==mod(ver,2)&&1==mod(hor,2))imDst(ver, hor, 3) =imDst(ver,hor,2) + ( bayerPadding(ver, hor-1)- imDst(ver, hor-1, 2) - imDst(ver, hor+1, 2) + bayerPadding(ver, hor+1) )/2;imDst(ver, hor, 1) = imDst(ver,hor,2) + ( bayerPadding(ver-1, hor)- imDst(ver-1, hor, 2) - imDst(ver+1, hor, 2) + bayerPadding(ver+1, hor) )/2;endendendend
imDst = uint8(imDst(3:height+2, 3:width+2, :)); % 正确裁剪
figure,imshow(imDst);title('demosaic image');orgImage = imread('images/kodim19.png');
figure, imshow(orgImage);title('org image');效果:
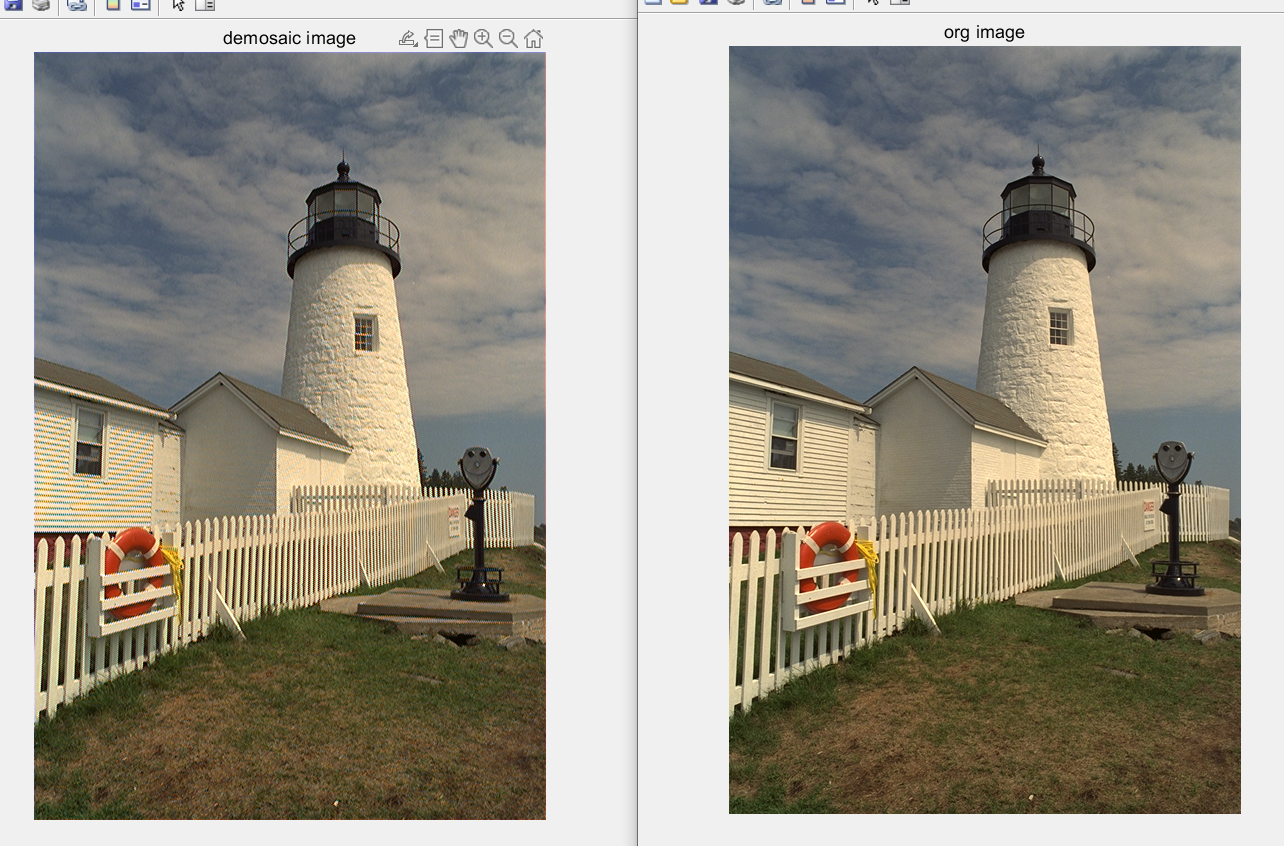
伪彩还是存在的。G值的精确更新可以减少伪彩。
基于方向加权的方法
基本原理参考:小话demosaic (二)
通过分析边缘方向来选择插值方向,从而减少边缘的模糊,保留边缘信息。
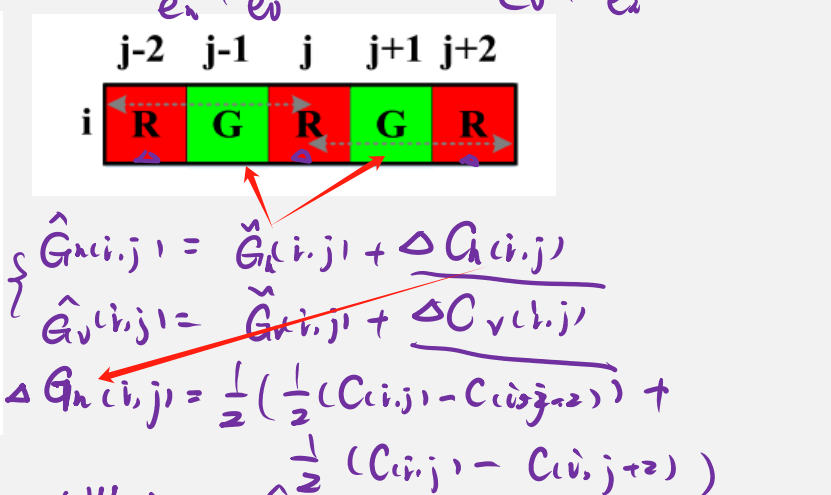
RB缺失的G通道的插值
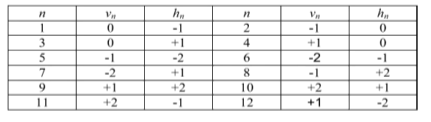
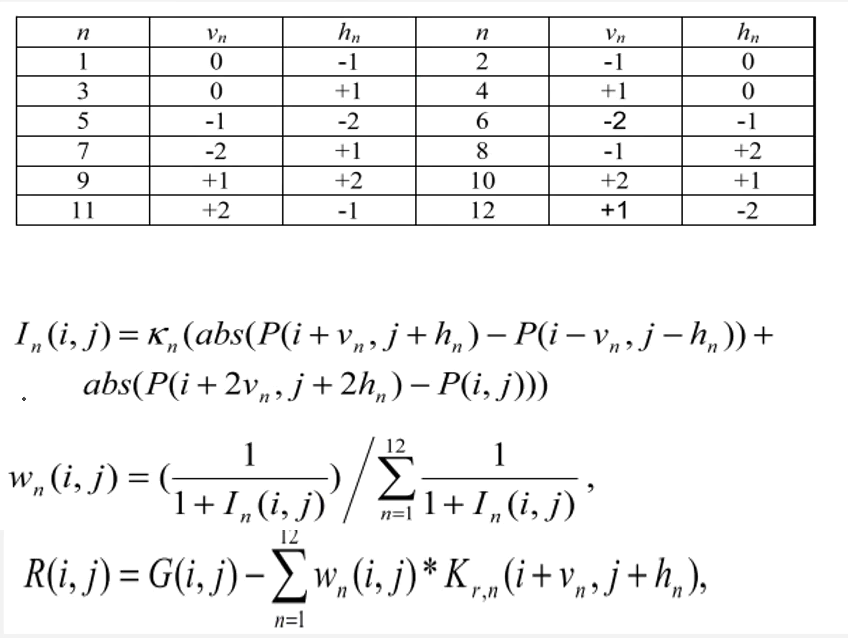
分别计算出各个方向的梯度值,计算公式如下:
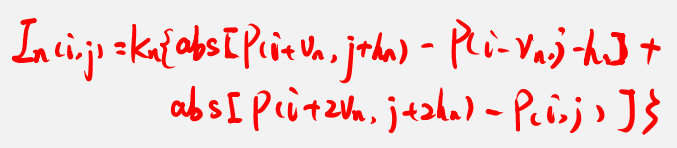
例对于B44来说:对于B上的G插值

K n K_{n} Kn是量化邻域像素间的颜色差异的系数。Kn值越小,表明该方向颜色变化平缓,插值可靠性高;反之则可能存在边缘,需降低权重。
各个梯度上的权重计算如下:
W n ( i , j ) = 1 ( 1 + I n ( i , j ) ) / ∑ n = 1 12 1 ( 1 + I n ( i , j ) ) W_{n(i,j)}=\frac{1}{(1 + I_{n(i,j)})}\big/\sum_{n=1}^{12}\frac{1}{(1 + I_{n(i,j)})} Wn(i,j)=(1+In(i,j))1/n=1∑12(1+In(i,j))1
在边缘区域,沿边缘方向的Kn差异小,对应Wn更大;跨边缘方向Kn差异大,Wn趋近于零。
则插值的 G i , j G_{i,j} Gi,j:
G ( i , j ) = B ( i , j ) + ∑ n = 1 12 W n ( i , j ) ∗ K b , n ( i + v n , j + h n ) G_{(i,j)}=B_{(i,j)}+\sum_{n=1}^{12}{W_{n(i,j)}}*K_{b,n}(i+v_{n},j+h_{n}) G(i,j)=B(i,j)+n=1∑12Wn(i,j)∗Kb,n(i+vn,j+hn)
K b , n ( i + v n , j + h n ) = G ( i + v n , j + h n ) − B ( i + v n , j + h n ) K_{b,n}(i+v_{n},j+h_{n}) = G_(i+v_{n},j+h_{n})-B_(i+v_{n},j+h_{n}) Kb,n(i+vn,j+hn)=G(i+vn,j+hn)−B(i+vn,j+hn)
即 G ( i , j ) − B ( i , j ) G_{(i,j)}-B_{(i,j)} G(i,j)−B(i,j)=色差,B则是上下或者 左右的均值。
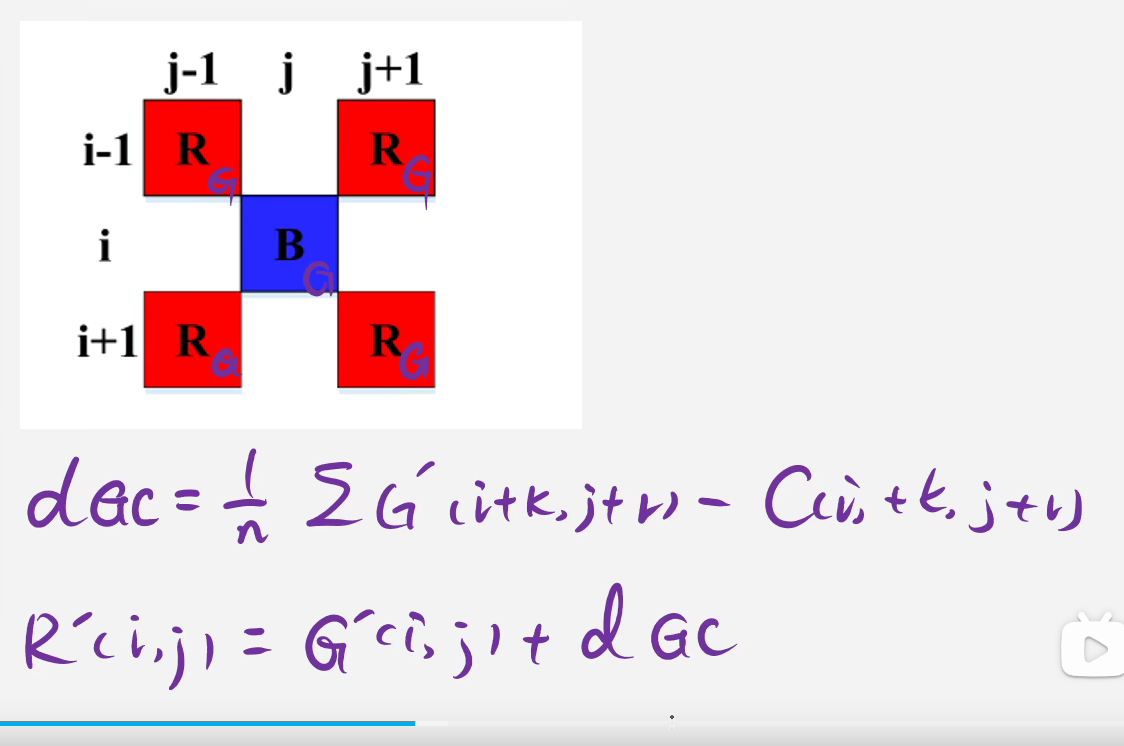
RB缺失的BR的插值
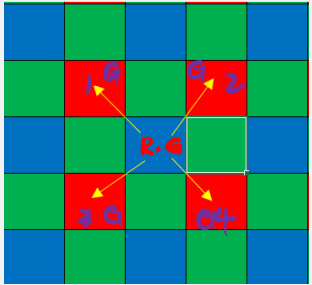
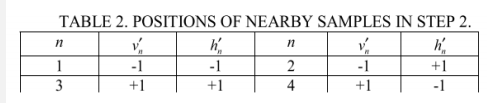
对于B上的R插值:
同理求四个方向的梯度值:

各个梯度上的权重计算如下:
W n ( i , j ) = 1 1 + I n ( i , j ) / ∑ n = 1 4 1 1 + I n ( i , j ) W_{n(i,j)} = \frac{1}{1 + I_{n(i,j)}} \Bigg/ \sum_{n = 1}^{4} \frac{1}{1 + I_{n(i,j)}} Wn(i,j)=1+In(i,j)1/n=1∑41+In(i,j)1
则:
R ( i , j ) = G ( i , j ) − ∑ n = 1 4 W n ( i , j ) ∗ K r n ( i + v n ′ , j + h n ′ ) R_{(i,j)}=G_{(i,j)}-\sum_{n=1}^{4}{W_{n(i,j)}}*K_{rn}(i+v'_{n},j+h'_{n}) R(i,j)=G(i,j)−n=1∑4Wn(i,j)∗Krn(i+vn′,j+hn′)
K r n ( i + v n ′ , j + h n ′ ) = G ( i + v n ′ , j + h n ′ ) − R ( i + v n ′ , j + h n ′ ) K_{rn}(i+v'_{n},j+h'_{n}) = G_(i+v'_{n},j+h'_{n})-R_(i+v'_{n},j+h'_{n}) Krn(i+vn′,j+hn′)=G(i+vn′,j+hn′)−R(i+vn′,j+hn′)
同理R则是上下或者 左右的均值。
G缺失的BR的插值
和BR缺失的G插值是一样的:
代码实现
%% --------------------------------
%% reference: "Directionally weighted color interpolation for digital cameras"
%% --------------------------------
clc;clear;close all;%% ------------Raw Format----------------
filePath = 'images/kodim19_8bits_RGGB.raw';
bayerFormat = 'RGGB';
width = 512;
height= 768;
bits = 8;%% ------------Global Value--------------
RC = 1;
GC = 2;
BC = 3;%% --------------------------------------
orgImg = imread('images/kodim19.png');
figure();imshow(orgImg);title('org image');bayerData = readRaw(filePath, bits, width, height);
figure();
imshow(bayerData);
title('raw image');%% expand image inorder to make it easy to calculate edge pixels
addpath('../publicFunction');
bayerPadding = expandRaw(bayerData, 4);imDst = zeros(height+8, width+8, 3); %% Interpolate the missing green value of blue/red samples 计算插值的 r和b差的g
for ver = 5: height + 4for hor = 5: width +4% R channalif(1 == mod(ver, 2) && 1 == mod(hor, 2))imDst(ver, hor, 1) = bayerPadding(ver, hor);neighborhoodData = bayerPadding(ver-4: ver+4, hor-4: hor+4);Wn = DW_Wn(neighborhoodData, 12);Kn = DW_Kn(neighborhoodData, 12);imDst(ver, hor, 2) = bayerPadding(ver, hor) + sum(Wn .* Kn);% B channalelseif (0 == mod(ver, 2) && 0 == mod(hor, 2))imDst(ver, hor, 3) = bayerPadding(ver, hor);neighborhoodData = bayerPadding(ver-4: ver+4, hor-4: hor+4);Wn = DW_Wn(neighborhoodData, 12);Kn = DW_Kn(neighborhoodData, 12);imDst(ver, hor, 2) = bayerPadding(ver, hor) + sum(Wn .* Kn);% Grelseif (1 == mod(ver, 2) && 0 == mod(hor, 2))imDst(ver, hor, 2) = bayerPadding(ver, hor);% Gbelseif (0 == mod(ver, 2) && 1 == mod(hor, 2))imDst(ver, hor, 2) = bayerPadding(ver, hor);endend
end% expand the imDst
imDst(:, 1: 4, :) = imDst(:, 5: 8, :);
imDst(:, width+5: width+8, :) = imDst(:, width+1: width+4, :);
imDst(1:4, : , :) = imDst(5: 8, :, :);
imDst(height+5: height+8, : , :) = imDst(height+1: height+4, :, :);%% Interpolate the missing red/blue values of blue/red samples.
for ver = 5: height + 4for hor = 5: width +4% R channalif(1 == mod(ver, 2) && 1 == mod(hor, 2))neighborRaw = bayerPadding(ver-4: ver+4, hor-4: hor+4);Wn = DW_Wn(neighborRaw, 4);neighborhoodData = imDst(ver-4: ver+4, hor-4: hor+4, :);Kn = DW_Kn(neighborhoodData, 4, BC);imDst(ver, hor, 3) = imDst(ver, hor, 2) - sum(Wn .* Kn);% B channalelseif (0 == mod(ver, 2) && 0 == mod(hor, 2))neighborRaw = bayerPadding(ver-4: ver+4, hor-4: hor+4);Wn = DW_Wn(neighborRaw, 4);neighborhoodData = imDst(ver-4: ver+4, hor-4: hor+4, :);Kn = DW_Kn(neighborhoodData, 4, RC);imDst(ver, hor, 1) = imDst(ver, hor, 2) - sum(Wn .* Kn);elsecontinueendend
end
% expand the imDst
imDst(:, 1: 4, :) = imDst(:, 5: 8, :);
imDst(:, width+5: width+8, :) = imDst(:, width+1: width+4, :);
imDst(1:4, : , :) = imDst(5: 8, :, :);
imDst(height+5: height+8, : , :) = imDst(height+1: height+4, :, :);%% Interpolate missing red/blue values of green samples.
for ver = 5: height + 4for hor = 5: width +4neighborhoodData = imDst(ver-4: ver+4, hor-4: hor+4, :);% R channalif(1 == mod(ver, 2) && 1 == mod(hor, 2))continue% B channalelseif (0 == mod(ver, 2) && 0 == mod(hor, 2))continue% GelseWrn = DW_Wn(neighborhoodData, 12, GC, RC);Wbn = DW_Wn(neighborhoodData, 12, GC, BC);Krn = DW_Kn(neighborhoodData, 12, RC);Kbn = DW_Kn(neighborhoodData, 12, BC);imDst(ver, hor, 1) = imDst(ver, hor, 2) - sum(Wrn .* Krn);imDst(ver, hor, 3) = imDst(ver, hor, 2) - sum(Wbn .* Kbn);endend
end
% expand the imDst
imDst(:, 1: 4, :) = imDst(:, 5: 8, :);
imDst(:, width+5: width+8, :) = imDst(:, width+1: width+4, :);
imDst(1:4, : , :) = imDst(5: 8, :, :);
imDst(height+5: height+8, : , :) = imDst(height+1: height+4, :, :);
figure();imshow(uint8(imDst));title('now');%% Adjust the estimated green values of red/blue samples
for ver = 5: height + 4for hor = 5: width +4neighborhoodData = imDst(ver-4: ver+4, hor-4: hor+4, :);% R channalif(1 == mod(ver, 2) && 1 == mod(hor, 2))Wrn = DW_Wn(neighborhoodData, 12, RC, GC); Krn = DW_Kn(neighborhoodData, 12, RC);imDst(ver, hor, 2) = imDst(ver, hor, 1) + sum(Wrn .* Krn);% B channalelseif (0 == mod(ver, 2) && 0 == mod(hor, 2))Wbn = DW_Wn(neighborhoodData, 12, BC, GC);Kbn = DW_Kn(neighborhoodData, 12, BC);imDst(ver, hor, 2) = imDst(ver, hor, 3) + sum(Wbn .* Kbn);% Gelsecontinueendend
end
demosaicImg = imDst(5: height + 4, 5: width +4, :);
figure();imshow(uint8(demosaicImg));title('demosaicking image');Wn计算:这里的1-4方向kn=0.5,up主是根据插值点的距离来选择的,1-4方向近,权重越大,In越小。(存疑?
function Wn = DW_Wn(neighborhoodData, directionNum, channelDeal, channelAdded)
% DW_Wn.m get rawData from HiRawImage
% Input:
% neighborhoodData the data of neighborhood range
% directionNum the num of direction
% channalAdded the channel need to be added
% Output:
% Wn The weignt of each direction
% Note:
if nargin < 3channelDeal = 1;channelAdded = 1;
end
In = zeros(directionNum, 1);
Wn = zeros(directionNum, 1);
[h, w, c] = size(neighborhoodData);
centerH = round(h/2);
centerW = round(w/2);
sumIn = 0;
k=4;
switch directionNumcase 12In(1) = 0.5*(abs(neighborhoodData(centerH, centerW-1, channelAdded) - neighborhoodData(centerH, centerW+1, channelAdded)) + ...abs(neighborhoodData(centerH, centerW-2, channelDeal) - neighborhoodData(centerH, centerW, channelDeal)));In(2) = 0.5*(abs(neighborhoodData(centerH-1, centerW, channelAdded) - neighborhoodData(centerH+1, centerW, channelAdded)) + ...abs(neighborhoodData(centerH-2, centerW, channelDeal) - neighborhoodData(centerH, centerW, channelDeal)));In(3) = 0.5*(abs(neighborhoodData(centerH, centerW+1, channelAdded) - neighborhoodData(centerH, centerW-1, channelAdded)) + ...abs(neighborhoodData(centerH, centerW+2, channelDeal) - neighborhoodData(centerH, centerW, channelDeal)));In(4) = 0.5*(abs(neighborhoodData(centerH+1, centerW, channelAdded) - neighborhoodData(centerH-1, centerW, channelAdded)) + ...abs(neighborhoodData(centerH+2, centerW) - neighborhoodData(centerH, centerW))); In(5) = (abs(neighborhoodData(centerH-1, centerW-2, channelAdded) - neighborhoodData(centerH+1, centerW+2, channelAdded)) + ...abs(neighborhoodData(centerH-2, centerW-4, channelDeal) - neighborhoodData(centerH, centerW, channelDeal)));In(6) = (abs(neighborhoodData(centerH-2, centerW-1, channelAdded) - neighborhoodData(centerH+2, centerW+1, channelAdded)) + ...abs(neighborhoodData(centerH-4, centerW-2, channelDeal) - neighborhoodData(centerH, centerW, channelDeal)));In(7) = (abs(neighborhoodData(centerH-2, centerW+1, channelAdded) - neighborhoodData(centerH+2, centerW-1, channelAdded)) + ...abs(neighborhoodData(centerH-4, centerW+2, channelDeal) - neighborhoodData(centerH, centerW, channelDeal)));In(8) = (abs(neighborhoodData(centerH-1, centerW+2, channelAdded) - neighborhoodData(centerH+1, centerW-2, channelAdded)) + ...abs(neighborhoodData(centerH-2, centerW+4, channelDeal) - neighborhoodData(centerH, centerW, channelDeal)));In(9) = (abs(neighborhoodData(centerH+1, centerW+2, channelAdded) - neighborhoodData(centerH-1, centerW-2, channelAdded)) + ...abs(neighborhoodData(centerH+2, centerW+4, channelDeal) - neighborhoodData(centerH, centerW, channelDeal))); In(10) = (abs(neighborhoodData(centerH+2, centerW+1, channelAdded) - neighborhoodData(centerH-2, centerW-1, channelAdded)) + ...abs(neighborhoodData(centerH+4, centerW+2, channelDeal) - neighborhoodData(centerH, centerW, channelDeal)));In(11) = (abs(neighborhoodData(centerH+2, centerW-1, channelAdded) - neighborhoodData(centerH-2, centerW+1, channelAdded)) + ...abs(neighborhoodData(centerH+4, centerW-2, channelDeal) - neighborhoodData(centerH, centerW, channelDeal)));In(12) = (abs(neighborhoodData(centerH+1, centerW-2, channelAdded) - neighborhoodData(centerH-1, centerW+2, channelAdded)) + ...abs(neighborhoodData(centerH+2, centerW-4, channelDeal) - neighborhoodData(centerH, centerW, channelDeal))); for i =1 :12sumIn = sumIn + (1/(1+In(i)));endfor i =1 :12Wn(i) = (1/(1+In(i)))/sumIn;endcase 4In(1) = abs(neighborhoodData(centerH-1, centerW-1) - neighborhoodData(centerH+1, centerW+1)) + ...abs(neighborhoodData(centerH-2, centerW-2) - neighborhoodData(centerH, centerW));In(2) = abs(neighborhoodData(centerH-1, centerW+1) - neighborhoodData(centerH+1, centerW-1)) + ...abs(neighborhoodData(centerH-2, centerW+2) - neighborhoodData(centerH, centerW));In(3) = abs(neighborhoodData(centerH+1, centerW+1) - neighborhoodData(centerH-1, centerW-1)) + ...abs(neighborhoodData(centerH+2, centerW+2) - neighborhoodData(centerH, centerW));In(4) = abs(neighborhoodData(centerH+1, centerW-1) - neighborhoodData(centerH-1, centerW+1)) + ...abs(neighborhoodData(centerH+2, centerW-2) - neighborhoodData(centerH, centerW));for i =1 :4sumIn = sumIn + (1/(1+In(i)));endfor i =1 :4Wn(i) = (1/(1+In(i)))/sumIn;end
end
K b , n K_{b,n} Kb,n或 K r , n K_{r,n} Kr,n计算:
function Kn = DW_Kn(neighborhoodData, directionNum, channelAdded)
% DW_Kn.m get rawData from HiRawImage
% Input:
% neighborhoodData the data of neighborhood range
% directionNum the num of direction
% channelAdded the channal to be interpolated
% Output:
% Kn The color defference of each direction
% Note: % The default value of channalAdded is 1 if there is no input of it
if nargin < 3channelAdded = 1;
end
Kn = zeros(directionNum, 1);
[h, w, c] = size(neighborhoodData);
centerH = round(h/2);
centerW = round(w/2);if c == 1% Take the average of the two adjacent samples of the desired color in the% Bayer array if the neighborhoodData is RawKn(1) = neighborhoodData(centerH, centerW-1) - (neighborhoodData(centerH, centerW) + neighborhoodData(centerH, centerW-2)) / 2;Kn(2) = neighborhoodData(centerH-1, centerW) - (neighborhoodData(centerH, centerW) + neighborhoodData(centerH-2, centerW)) / 2;Kn(3) = neighborhoodData(centerH, centerW+1) - (neighborhoodData(centerH, centerW) + neighborhoodData(centerH, centerW+2)) / 2;Kn(4) = neighborhoodData(centerH+1, centerW) - (neighborhoodData(centerH, centerW) + neighborhoodData(centerH+2, centerW)) / 2;Kn(5) = neighborhoodData(centerH-1, centerW-2) - (neighborhoodData(centerH-2, centerW-2) + neighborhoodData(centerH, centerW-2)) / 2;Kn(6) = neighborhoodData(centerH-2, centerW-1) - (neighborhoodData(centerH-2, centerW-2) + neighborhoodData(centerH-2, centerW)) / 2;Kn(7) = neighborhoodData(centerH-2, centerW+1) - (neighborhoodData(centerH-2, centerW) + neighborhoodData(centerH-2, centerW+2)) / 2;Kn(8) = neighborhoodData(centerH-1, centerW+2) - (neighborhoodData(centerH-2, centerW+2) + neighborhoodData(centerH, centerW+2)) / 2;Kn(9) = neighborhoodData(centerH+1, centerW+2) - (neighborhoodData(centerH+2, centerW+2) + neighborhoodData(centerH, centerW+2)) / 2;Kn(10) = neighborhoodData(centerH+2, centerW+1) - (neighborhoodData(centerH+2, centerW+2) + neighborhoodData(centerH+2, centerW)) / 2;Kn(11) = neighborhoodData(centerH+2, centerW-1) - (neighborhoodData(centerH+2, centerW-2) + neighborhoodData(centerH+2, centerW)) / 2;Kn(12) = neighborhoodData(centerH+1, centerW-2) - (neighborhoodData(centerH+2, centerW-2) + neighborhoodData(centerH, centerW-2)) / 2;
elseswitch directionNumcase 12Kn(1) = neighborhoodData(centerH, centerW-1, 2) - neighborhoodData(centerH, centerW-1, channelAdded);Kn(2) = neighborhoodData(centerH-1, centerW, 2) - neighborhoodData(centerH-1, centerW, channelAdded );Kn(3) = neighborhoodData(centerH, centerW+1, 2) - neighborhoodData(centerH, centerW+1, channelAdded);Kn(4) = neighborhoodData(centerH+1, centerW, 2) - neighborhoodData(centerH+1, centerW, channelAdded);Kn(5) = neighborhoodData(centerH-1, centerW-2, 2) - neighborhoodData(centerH-1, centerW-2, channelAdded);Kn(6) = neighborhoodData(centerH-2, centerW-1, 2) - neighborhoodData(centerH-2, centerW-1, channelAdded);Kn(7) = neighborhoodData(centerH-2, centerW+1, 2) - neighborhoodData(centerH-2, centerW+1, channelAdded);Kn(8) = neighborhoodData(centerH-1, centerW+2, 2) - neighborhoodData(centerH-1, centerW+2, channelAdded);Kn(9) = neighborhoodData(centerH+1, centerW+2, 2) - neighborhoodData(centerH+1, centerW+2, channelAdded);Kn(10) = neighborhoodData(centerH+2, centerW+1, 2) - neighborhoodData(centerH+2, centerW+1, channelAdded);Kn(11) = neighborhoodData(centerH+2, centerW-1, 2) - neighborhoodData(centerH+2, centerW-1, channelAdded);Kn(12) = neighborhoodData(centerH+1, centerW-2, 2) - neighborhoodData(centerH+1, centerW-2, channelAdded);case 4Kn(1) = neighborhoodData(centerH-1, centerW-1, 2) - neighborhoodData(centerH-1, centerW-1, channelAdded);Kn(2) = neighborhoodData(centerH-1, centerW+1, 2) - neighborhoodData(centerH-1, centerW+1, channelAdded);Kn(3) = neighborhoodData(centerH+1, centerW+1, 2) - neighborhoodData(centerH+1, centerW+1, channelAdded);Kn(4) = neighborhoodData(centerH+1, centerW-1, 2) - neighborhoodData(centerH+1, centerW-1, channelAdded);end
end对于Kn,应该是保留梯度较小的方向的高权重,抑制梯度较大的方向。这里做了个小修改:
[minValues, minIndices] = mink(In, k);sumIn = 0;for i =1 :12isPresent = ismember(i, minIndices);if isPresent %是最小值sumIn = sumIn + (1/(1+0.5*In(i)));elsesumIn = sumIn + (1/(1+1.25*In(i)));end endfor i =1 :12isPresent = ismember(i, minIndices);if isPresent %是最小值 高权重Wn(i) = (1/(1+0.5*In(i)))/sumIn;else %梯度大,边缘 低权重Wn(i) = (1/(1+1.25*In(i)))/sumIn;end end
效果:和以上没进行边缘检测的方法相比,质量是显著提升的。
基于边缘检测的方法
1)先计算水平梯度和垂直梯度
e h = ( ∣ C i − 1 , j − 1 − C i − 1 , j + 1 ∣ + 2 ∣ C i , j − 1 − C i , j + 1 ∣ + ∣ C i + 1 , j − 1 − C i + 1 , j + 1 ∣ ) / 4 ; e_{h}=(|C_{i-1,j-1}-C_{i-1,j+1}|+2|C_{i,j-1}-C_{i,j+1}|+|C_{i+1,j-1}-C_{i+1,j+1}|)/4; eh=(∣Ci−1,j−1−Ci−1,j+1∣+2∣Ci,j−1−Ci,j+1∣+∣Ci+1,j−1−Ci+1,j+1∣)/4;
e v = ( ∣ C i − 1 , j − 1 − C i + 1 , j − 1 ∣ + 2 ∣ C i − 1 , j − C i + 1 , j ∣ + ∣ C i − 1 , j + 1 − C i + 1 , j + 1 ∣ ) / 4 ; e_{v}=(|C_{i-1,j-1}-C_{i+1,j-1}|+2|C_{i-1,j}-C_{i+1,j}|+|C_{i-1,j+1}-C_{i+1,j+1}|)/4; ev=(∣Ci−1,j−1−Ci+1,j−1∣+2∣Ci−1,j−Ci+1,j∣+∣Ci−1,j+1−Ci+1,j+1∣)/4;
2)计算两个方向上的权重
W h = 1 e h / 1 e h + e v W_{h}=\frac{1}{e_{h}}\big/\frac{1}{e_{h}+e_{v}} Wh=eh1/eh+ev1
W v = 1 e v / 1 e h + e v W_{v}=\frac{1}{e_{v}}\big/\frac{1}{e_{h}+e_{v}} Wv=ev1/eh+ev1
计算缺失的G
最后

计算缺失的RB值/计算缺失的G值
跟色差法同理
每天补一补坑。
相关文章:
ISP--Demosaicking
文章目录 前言算法解释简单的线性插值代码实现 色差法和色比法基于方向加权的方法RB缺失的G通道的插值RB缺失的BR的插值G缺失的BR的插值代码实现 基于边缘检测的方法计算缺失的G计算缺失的RB值/计算缺失的G值 前言 人眼之所以有能感受到自然界的颜色,是因为人眼的感…...
国标GB28181协议EasyCVR视频融合平台:5G时代远程监控赋能通信基站安全管理
一、背景介绍 随着移动通信行业的迅速发展,无人值守的通信基站建设规模不断扩大。这些基站大多建于偏远地区,周边人迹罕至、交通不便,给日常的维护带来了极大挑战。其中,位于空旷地带的基站设备,如空调、蓄电池等&…...

vue watch 和 watchEffect的区别和用法
在 Vue.js 里,watch 和 watchEffect 都用于响应式地追踪数据变化并执行相应操作,不过它们在使用方式、应用场景等方面存在差异。 1. watch watch 是 Vue 提供的一个选项,用于监听特定数据的变化。当监听的数据发生变化时,会触发…...

SQL 不走索引的常见情况
在 SQL 查询中,即使表上有索引,某些情况下数据库优化器也可能决定不使用索引。以下是常见的不走索引的情况: 1. 使用否定操作符 NOT IN ! 或 <> NOT EXISTS NOT LIKE 2. 对索引列使用函数或运算 -- 不走索引 SELECT * FROM user…...

git配置 gitcode -- windows 系统
版本 $ git --version git version 2.49.0.windows.1检查现有的 SSH 密钥 打开git-bash终端,执行以下命令查看是否已经生成过 SSH 密钥: ls -al ~/.ssh如果看到类似 id_rsa 和 id_rsa.pub(或者其他命名的密钥对)文件࿰…...

基于Kubeadm实现K8S集群扩缩容指南
一、集群缩容操作流程 1.1 缩容核心步骤 驱逐节点上的Pod 执行kubectl drain命令驱逐节点上的Pod,并忽略DaemonSet管理的Pod: kubectl drain <节点名> --ignore-daemonsets # 示例:驱逐worker233节点 kubectl drain worker233 --ignor…...
模拟-与-现实协同训练:基于视觉机器人操控的简单方法
25年3月来自 UT Austin、Nvidia、UC Berkeley 和纽约大学的论文“Sim-and-Real Co-Training: A Simple Recipe for Vision-Based Robotic Manipulation”。 大型现实世界机器人数据集在训练通才机器人模型方面拥有巨大潜力,但扩展现实世界人类数据收集既耗时又耗资…...
WRS-PHM电机智能安康系统:为浙江某橡胶厂构筑坚实的生产防线
以行业工况为背景 一、顾客工厂的背景 浙江某橡胶厂以电机为中心生产设备必须连续平稳运行。但由于缺乏有效的故障预警体系,电机故障就像潜伏着的“不定时炸弹”,不但不时地造成生产流程的中断,也使对生产进行管理异常艰难,对持续安全生产提…...

将 CrewAI 与 Elasticsearch 结合使用
作者:来自 Elastic Jeffrey Rengifo 学习如何使用 CrewAI 为你的代理团队创建一个 Elasticsearch 代理,并执行市场调研任务。 CrewAI 是一个用于编排代理的框架,它通过角色扮演的方式让多个代理协同完成复杂任务。 如果你想了解更多关于代理…...

wait 和notify ,notifyAll,sleep
wait 使线程进入阻塞状态,释放CPU,以及锁 sleep 使线程进入睡眠状态,sleep方法不会释放CPU资源和锁资源,而是让出CPU的使用权。操作系统会将CPU分配给其他就绪线程,但当前线程依然存在,不会释放其占用的…...
)
ECMAScript 6 新特性(二)
ECMAScript 6 新特性(二) ECMAScript 6 新特性(一) ECMAScript 6 新特性(二)(本文) ECMAScript 7~10 新特性 1. 生成器 生成器函数是 ES6 提供的一种解决异步编程方案,一…...

SpringBoot接口覆盖上一次调用的实现方案
调用springboot接口时,如何实现覆盖上一次调用 Spring Boot 接口覆盖上一次调用的实现方案 以下是多种实现覆盖上一次接口调用的方案,适用于不同场景。 方案一:同步锁控制(单机环境) 适用场景:单实例…...

Spring 的 IoC 和 DI 详解:从零开始理解与实践
Spring 的 IoC和 DI 详解:从零开始理解与实践 一、IoC(控制反转) 1、什么是 IoC? IoC 是一种设计思想,它的核心是将对象的创建和管理权从开发者手中转移到外部容器(如 Spring 容器)。通过这种…...

Python Cookbook-5.12 检查序列的成员
任务 你需要对一个列表执行很频繁的成员资格检査。而in操作符的 O(n)时间复杂度对性能的影响很大,你也不能将序列转化为一个字典或者集合,因为你还需要保留原序列的元素顺序。 解决方案 假设需要给列表添加一个在该列表中不存在的元素。一个可行的方法…...

签名过期怎么办?
1无论是证书到期还是被封停,只需要找到签名服务商,重新签名就可以了,但签名经常性过期会造成app用户流失,所以我们在选择签名时需要注意,在资金充足的情况下,优先选择独立、稳定签名,接下来我们…...

ZYNQ笔记(四):AXI GPIO
版本:Vivado2020.2(Vitis) 任务:使用 AXI GPIO IP 核实现按键 KEY 控制 LED 亮灭(两个都在PL端) 一、介绍 AXI GPIO (Advanced eXtensible Interface General Purpose Input/Output) 是 Xilinx 提供的一个可…...

实操(环境变量)Linux
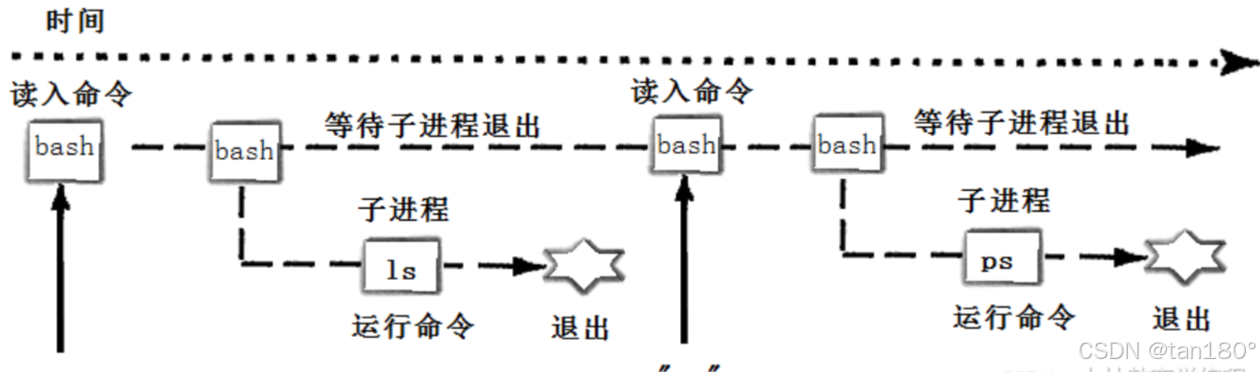
环境变量概念 我们用语言写的文件编好后变成了程序,./ 运行的时候他就会变成一个进程被操作系统调度并运行,运行完毕进程相关资源被释放,因为它是一个bash的子进程,所以它退出之后进入僵尸状态,bash回收他的退出结果&…...

【补题】P9423 [蓝桥杯 2023 国 B] 数三角
题意:小明在二维坐标系中放置了 n 个点,他想在其中选出一个包含三个点的子集,这三个点能组成三角形。然而这样的方案太多了,他决定只选择那些可以组成等腰三角形的方案。请帮他计算出一共有多少种选法可以组成等腰三角形ÿ…...

Word / WPS 页面顶部标题 段前间距 失效 / 不起作用 / 不显示,标题紧贴页眉 问题及解决
问题描述: 在 Word 或者 WPS 里面,如果不是新的一节,而是位于新的一页首行时,不管怎么设置段前间距,始终是失效的,实际段前间距一直是零。 解决方案: 查询了很多方案均无法解决问题ÿ…...
)
Mysql自动增长数据的操作(修改增长最大值)
在MySQL中,如果你想要修改一个表的自增长(auto-increment)属性的起始值,可以使用ALTER TABLE语句。这对于初始化新环境或修复损坏的自增长计数器特别有用。下面是如何操作的一些步骤: 查看当前自增长值 首先ÿ…...
Linux自行实现的一个Shell(15)
文章目录 前言一、头文件和全局变量头文件全局变量 二、辅助函数获取用户名获取主机名获取当前工作目录获取最后一级目录名生成命令行提示符打印命令行提示符 三、命令处理获取用户输入解析命令行执行外部命令 四、内建命令添加环境变量检查和执行内建命令 五、初始化初始化环境…...
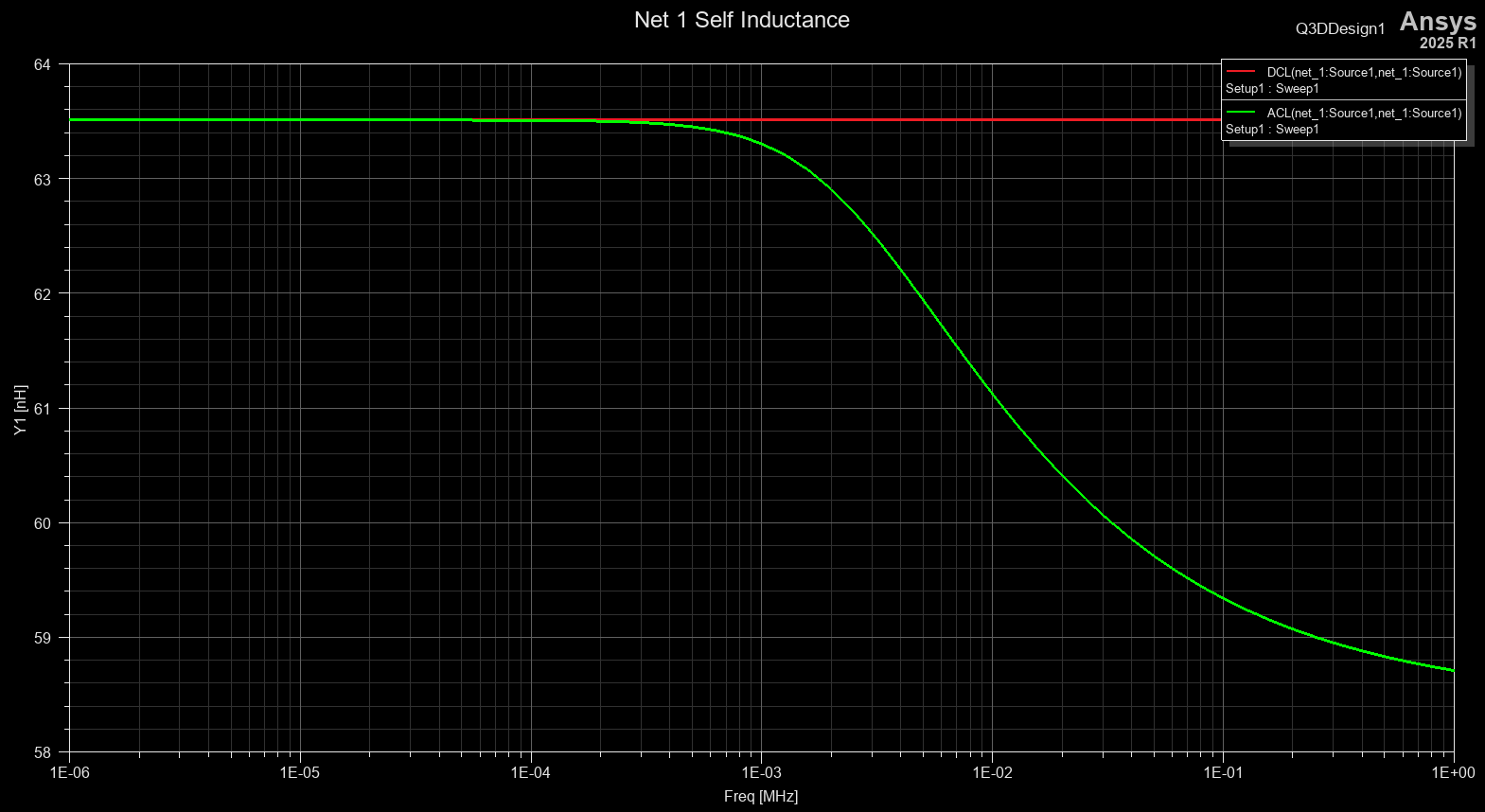
在 Q3D 中提取汇流条电感
汇流条排简介和设计注意事项 汇流条排是用于配电的金属导体,在许多应用中与传统布线相比具有设计优势。在设计母线排时,必须考虑几个重要的因素: 低电感:高频开关内容会导致无功损耗,从而降低效率电容:管…...

MySQL:事务的理解
一、CURD不加控制,会有什么问题 (1)因为,MySQL里面存的是数据,所以很有可能会被多个客户访问,所以mysqld可能一次会接受到多个关于CURD的请求。(2)且mysql内部是采用多线程来完成数…...

[raspberrypi 0w and respeaker 2mic]实时音频波形
0. 环境 ubuntu22主机, 192.168.8.162, raspberry 0w, 192.168.8.220 路由器 1. 树莓派 # rpi - send.py # 或者命令行:arecord -D plughw:1,0 -t wav -f cd -r 16000 -c 2 | nc 192.168.8.162 12345import socket imp…...

python 基础:句子缩写
n int(input()) for _ in range(n):words input().split()result ""for word in words:result word[0].upper()print(result)知识点讲解 input()函数 用于从标准输入(通常是键盘)读取用户输入的内容。它返回的是字符串类型。例如在代码中…...

Ruoyi-vue plus 5.2.2 flowble 结束节点异常错误
因业务要求, 我在结束节点的结束事件中,制作了一个归档的事件,来执行一个业务。 始终都会报错, 错误信息 ${archivTemplateListener} did not resolve to an implementation of interface org.flowable.engine.delegate.Execution…...

Sublime Text使用教程(用Sublime Text编写C语言程序)
Sublime Text 是一款当下非常流行的文本编辑器,其功能强大(提供有众多的插件)、界面简洁、还支持跨平台使用(包括 Mac OS X、Linux 和 Windows)。 在程序员眼中,Sublime Text 不仅仅是一个文本编辑器&…...

【1】k8s集群管理系列--包应用管理器之helm
一、helm概述 Helm核心是模板,即模板化K8s YAML文件。 通过模板实现Chart高效复用,当部署多个应用时,可以将差异化的字段进行模板化,在部署时使用-f或 者–set动态覆盖默认值,从而适配多个应用 helm工作流程…...

【书籍】DeepSeek谈《持续交付2.0》
目录 一、深入理解1. 核心理念升级:从"自动化"到"双环模型"2. 数字化转型的五大核心能力3. 关键实践与案例4. 组织与文化变革5. 与其它框架的关系6. 实际应用建议 二、对于开发实习生的帮助1. 立刻提升你的代码交付质量(技术验证环实…...
Mysql表的操作(2)
1.去重 select distinct 列名 from 表名 2.查询时排序 select 列名 from 表名 order by 列名 asc/desc; 不影响数据库里面的数据 错误样例 : 但结果却有点出乎意料了~为什么会失败呢? 其实这是因为书写的形式不对,如果带了引号,…...