嵌入式---加速度计
一、基本概念与定义
-
定义
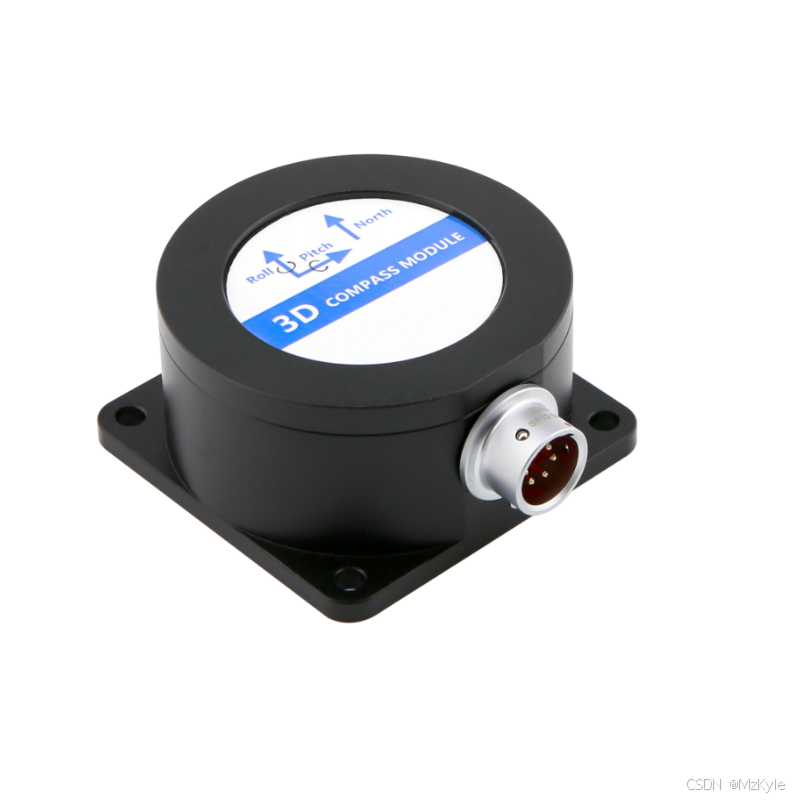
加速度计(Accelerometer)是一种测量物体加速度(线性加速度或振动加速度)的传感器,可检测物体运动状态、振动幅度、倾斜角度等,输出与加速度成比例的电信号(模拟或数字信号)。- 核心功能:测量加速度(单位:m/s²或g,1g=9.80665m/s²),间接反映物体的运动、振动、姿态变化。
-
物理基础
基于牛顿第二定律(F=ma),通过质量块(敏感质量)在加速度作用下产生的惯性力,转化为可测量的物理量(如位移、应力、电压等)。
二、工作原理与分类
(一)按工作原理分类
-
机械式加速度计
- 原理:利用质量块在加速度下的位移,通过机械结构(如杠杆、弹簧)传递并放大,结合电位器、齿轮等转换为电信号。
- 特点:结构简单、成本低,但精度低、体积大,已逐步被淘汰。
-
压电式加速度计
- 原理:基于压电效应(石英、压电陶瓷等材料在应力下产生电荷),质量块的惯性力使压电材料变形,输出电荷信号。
- 特点:高频响应好(适合振动测量)、量程大(可达10000g以上),但不能测量静态加速度(直流信号),需电荷放大器。
- 应用:工业振动监测、冲击测试、航空发动机状态监控。
-
电容式加速度计
- 原理:由固定电极和质量块(可动电极)构成电容,加速度导致质量块位移,改变电容值(差分电容结构提高灵敏度)。
- 特点:可测静态/动态加速度、功耗低、易集成,广泛用于MEMS传感器。
- 典型结构:平行板电容、梳齿电容(提高灵敏度)。
-
MEMS加速度计(微机电系统)
- 原理:基于MEMS工艺,在硅片上制造微型质量块、弹性梁、检测电极等结构,通过电容/压阻/隧道效应等检测位移。
- 分类:
- 电容式MEMS:最主流,高精度、低功耗(如手机加速度计)。
- 压阻式MEMS:质量块位移导致电阻变化(惠斯通电桥),灵敏度高但温度漂移大。
- 隧道效应式:利用量子隧穿效应,分辨率极高(可达10⁻⁹g),但工艺复杂。
- 优势:体积小(mm级)、成本低、易集成传感器融合(如与陀螺仪、磁力计组合成IMU)。
-
其他类型
- 压阻式:利用半导体压阻效应(如硅材料在应力下电阻率变化),常见于工业级传感器。
- 伺服式(力平衡式):通过反馈力抵消惯性力,精度极高(0.001g级),用于航空航天惯性导航。
- 光纤式:利用光纤应变或光程变化,抗电磁干扰,适合恶劣环境(如高压、高温)。
(二)按测量轴数分类
- 单轴:测量1个方向加速度(如沿x轴)。
- 双轴:测量x、y轴加速度(二维平面)。
- 三轴:测量x、y、z轴加速度(三维空间,最常用,如手机姿态检测)。
(三)按应用场景分类
- 静态加速度计:测量恒定或低频加速度(如重力场中的倾斜角度)。
- 动态加速度计:测量高频振动、冲击等瞬态加速度(如地震监测、车辆碰撞测试)。
三、关键技术参数
-
量程(Range)
- 可测量的加速度范围(如±2g、±50g、±2000g),需根据应用选择(消费电子常用±2g~±16g,工业振动监测需±100g以上)。
-
灵敏度(Sensitivity)
- 单位加速度对应的输出信号变化(如1000mV/g),高灵敏度适合微小加速度测量,但易受噪声干扰。
-
分辨率(Resolution)
- 可检测的最小加速度变化(如10μg),受噪声和量化误差限制(与ADC精度相关)。
-
带宽(Bandwidth)
- 有效测量的频率范围:
- 直流响应(0Hz~f):可测静态加速度(如MEMS电容式、伺服式)。
- 交流耦合(f_L~f_H):阻断直流,适合动态振动(如压电式,f_L>1Hz)。
- 有效测量的频率范围:
-
噪声密度(Noise Density)
- 单位带宽内的噪声幅度(如μg/√Hz),直接影响分辨率,低噪声设计需优化电路和结构。
-
非线性度(Nonlinearity)
- 输出与输入加速度的线性偏离程度(通常<0.1%FS,FS为满量程),影响测量精度。
-
温度漂移(Temperature Drift)
- 温度变化引起的零点偏移和灵敏度变化(如10μg/°C),需温度补偿(内置温度传感器或算法校正)。
-
零偏稳定性(Zero-g Offset Stability)
- 静止时输出偏离零加速度的程度(长期漂移,影响静态测量,如倾斜角度计算)。
-
抗冲击能力(Shock Resistance)
- 可承受的最大瞬时冲击加速度(如10000g持续1ms),MEMS传感器通常优于10000g。
四、应用领域
-
消费电子
- 手机/平板:姿态检测(横竖屏切换)、计步、运动识别(摇一摇)、跌落检测。
- 可穿戴设备:运动分析(跑步步频、游泳姿态)、跌倒检测(老年人监护)。
- 游戏外设:体感控制(如VR手柄动作捕捉)。
-
汽车电子
- 安全气囊触发:检测碰撞时的冲击加速度。
- ESP(车身稳定系统):监测车辆侧倾、俯仰加速度,辅助控制。
- 轮胎压力监测(TPMS):通过振动分析判断胎压异常。
-
航空航天与国防
- 惯性导航系统(INS):与陀螺仪、磁力计组合,提供三维运动参数(加速度、角速度、位置)。
- 导弹制导:高精度加速度计(如激光陀螺惯性导航)实时修正轨迹。
- 无人机/直升机:姿态控制(稳定悬停、避障)。
-
工业与智能制造
- 振动监测:电机、齿轮箱故障诊断(通过频谱分析加速度信号)。
- 结构健康监测:桥梁、建筑物的振动模态分析(长期加速度数据采集)。
- 机器人:机械臂运动控制、碰撞检测。
-
医疗与生物医学
- 康复设备:假肢运动控制、步态分析(检测下肢加速度)。
- 睡眠监测:通过体动加速度判断睡眠阶段(浅睡/深睡)。
- 医疗仪器:输液泵振动检测、手术机器人稳定控制。
-
地质与环境监测
- 地震仪:检测地表振动加速度,预警地震等级。
- 滑坡监测:布设在山体的加速度传感器实时反馈位移变化。
五、校准与误差来源
-
校准方法
- 静态校准:在已知重力场中(如水平/垂直放置),校准零偏和灵敏度(利用转台或倾斜台)。
- 动态校准:使用振动台产生标准加速度信号(如正弦波),验证带宽和幅频特性。
- 温度校准:在温箱中测试不同温度下的漂移,生成补偿系数。
-
主要误差来源
- 温度影响:材料热膨胀导致质量块位移偏差,需温度传感器实时补偿。
- 安装误差:传感器轴线与被测加速度方向不重合,引入余弦误差(需精确对准)。
- 交叉轴灵敏度:非测量轴的加速度引起的输出误差(如y轴加速度干扰x轴测量)。
- 噪声与干扰:电磁噪声(EMI)、电源纹波、机械振动耦合(需屏蔽和隔振设计)。
六、发展趋势
-
MEMS化与集成化
- 微型化(尺寸<1mm³)、低功耗(μA级电流),集成更多功能(如温度补偿、自校准电路)。
- 与陀螺仪、磁力计、气压计等集成,形成多功能惯性测量单元(IMU)或系统级芯片(SoC)。
-
高精度与高可靠性
- 分辨率提升至亚μg级(如用于重力梯度测量),零偏稳定性达μg级/小时。
- 耐极端环境(-55°C~+125°C温度、高压、强冲击),满足航空航天和工业严苛需求。
-
智能化与自诊断
- 内置微处理器,实现自动校准、故障检测(如传感器漂移预警)。
- 结合机器学习算法,优化噪声滤波、运动模式识别(如区分步行与跑步)。
-
新兴应用拓展
- 物联网(IoT):海量部署的低成本MEMS加速度计,用于设备状态监测(如智能电表振动检测)。
- 自动驾驶:高精度三轴加速度计辅助惯性导航,应对GNSS信号丢失场景。
- 元宇宙与AR/VR:更灵敏的姿态检测,实现精准手势识别和虚拟空间定位。
七、常见问题与对比
-
加速度计 vs. 陀螺仪
- 加速度计:测量线性加速度(含重力),用于姿态(倾斜角)、运动速度/位移计算(积分)。
- 陀螺仪:测量角速度,用于姿态角速率检测,结合加速度计可通过互补滤波提高姿态精度(如四元数融合算法)。
-
如何选择加速度计?
- 量程:根据应用场景(静态/动态)选择,如手机选±2g~±16g,工业振动选±100g以上。
- 带宽:动态测量需高频响应(如压电式适合1kHz~100kHz),静态选直流响应(MEMS电容式)。
- 精度需求:导航级需0.1g以下误差,消费电子可放宽至1%~5%。
- 环境因素:高温选压电陶瓷,强电磁选光纤式,低成本选MEMS。
八、总结
加速度计是现代测量与控制领域的核心传感器,从早期机械式到如今的MEMS集成化,其技术演进始终围绕微型化、高精度、低功耗和智能化。理解其工作原理、关键参数及应用场景,有助于在不同领域(消费电子、工业、航空航天)中合理选型和优化设计。未来,随着物联网、自动驾驶等技术的发展,加速度计将在更复杂的环境中发挥关键作用,推动“万物感知”的实现。
相关文章:
嵌入式---加速度计
一、基本概念与定义 定义 加速度计(Accelerometer)是一种测量物体加速度(线性加速度或振动加速度)的传感器,可检测物体运动状态、振动幅度、倾斜角度等,输出与加速度成比例的电信号(模拟或数字信…...
swagger + Document
swagger 虽然有了api接口,对于复杂接口返回值说明,文档还是不能少。如果是一个人做的还简单一点,现在都搞前后端分离,谁知道你要取那个值呢...
【Git】--- 多人协作实战场景
Welcome to 9ilks Code World (๑•́ ₃ •̀๑) 个人主页: 9ilk (๑•́ ₃ •̀๑) 文章专栏: Git 前面我们学习了Git的所有本地仓库的相关操作:git基本操作,分支理解,版本回退,冲突解决等等。同时我们还理解了远端仓库在开发的作用以及相关操作push…...

Higress: 阿里巴巴高性能云原生API网关详解
一、Higress概述 Higress是阿里巴巴开源的一款基于云原生技术构建的高性能API网关,专为Kubernetes和微服务架构设计。它集成了Ingress控制器、微服务网关和API网关功能于一体,支持多种协议和丰富的流量管理能力。 发展历程 Higress 从最初社区的 Isti…...

常见的 set 选项与空变量检查
在编写 Bash 脚本时,使用 set 命令中的一些选项可以帮助我们在脚本执行过程中及时捕获错误和潜在问题,避免脚本在出错时继续执行,提高脚本的可靠性和健壮性。 set -e:遇到错误就停 set -e 的作用是:一旦脚本中的某个…...

leetcode 377. Combination Sum IV
这道题也是完全背包问题。这道题和第518题几乎一摸一样,所不同的是,第518题要求的是组合数,而第377题要求的是排列数。虽然本题题目描述中说求的是组合数,但从例子1中(1,1,2)和&…...
VM——相机拍照失败
1、问题:相机频闪触发,在MVS中正常出图,在VM中出现拍照失败 2、解决: 1、首先排查网络设置(巨帧是否设置) 2、电脑的所有防火墙是否关闭 3、在MVS中恢复相机的设置参数为默认参数,删除VM中的全…...
初识Redis · 简单理解Redis
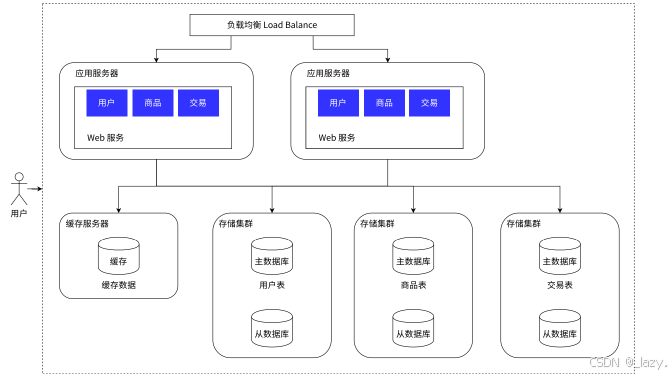
目录 前言: 分布式系统 开源节流 认识Redis 负载均衡 缓存 微服务 前言: 本文只是作为Redis的一篇杂谈,简单理解一下Redis为什么要存在,以及它能做到和它不能做到的事儿,简单提及一下它对应的优势有什么&#…...

目标检测YOLO实战应用案例100讲- 基于卷积神经网络的小目标检测算法研究与应用
目录 知识储备 基于改进YOLOv5的小目标检测算法 一、环境配置(Python 3.8+) 二、核心代码实现 1. 改进模型定义(models/yolov5s_tiny.py ) 2. 小目标数据增强(datasets/tiny_aug.py ) 3. 训练脚本(train.py ) 三、关键改进点说明 四、实验配置建议 前言 传统…...
自动驾驶时间同步
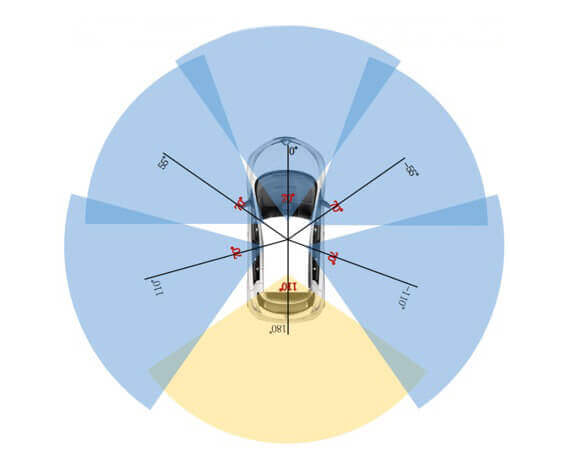
主要包含两个大的概念:时间系统间的时间同步与传感器数据间的时间同步 1. 时间系统间的时间同步 概念: 自动驾驶域控一般由多个芯片与多种类型的传感器组成,如:MCU SoC Camera Lidar Radar USS GNSS,其中 MCU…...
项目进度延误的十大原因及应对方案
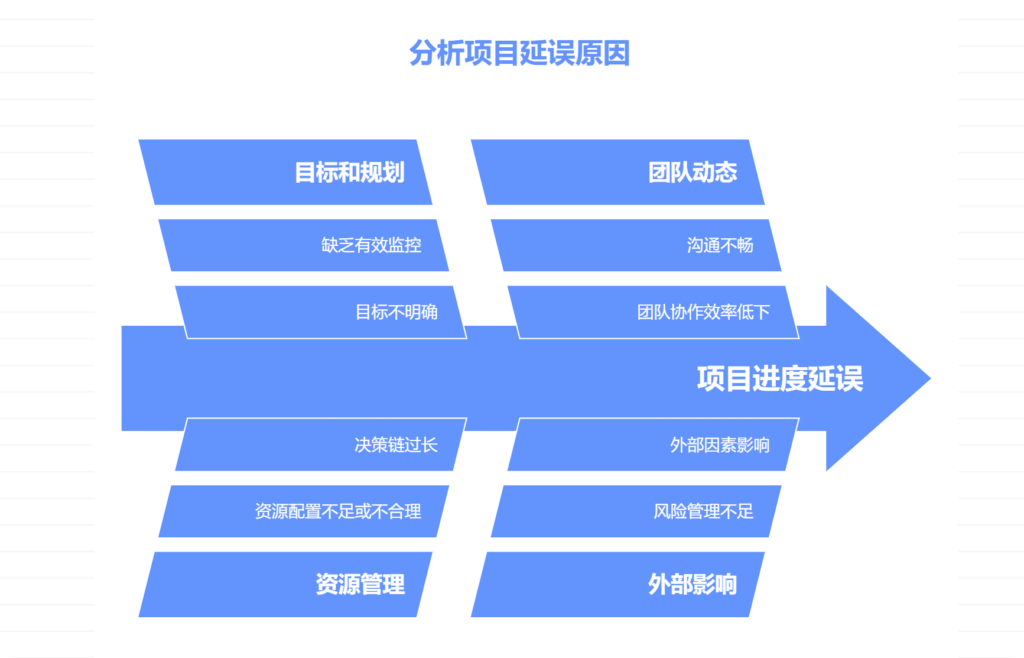
项目进度延误主要源于以下十大原因:目标不明确、需求频繁变更、资源配置不足或不合理、沟通不畅、风险管理不足、缺乏有效的项目监控、技术难题未及时解决、团队协作效率低下、决策链过长、外部因素影响。其中,需求频繁变更是导致延误的关键因素之一&…...

消息队列(IPC技术)
目录 一、Linux 中主要的进程间通信方式如下: 二、消息队列函数 (1)msgget函数 功能概述 函数原型 参数解释 返回值 示例 结果 问题 (2) msgsnd函数 功能概述 函数原型 参数说明 返回值 示例 结果 (3࿰…...
突破焊丝虚影干扰,端子焊点缺陷检测如何实现自动化?
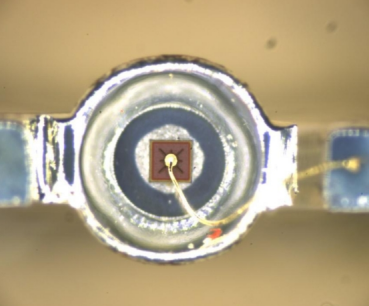
端子焊点作为 3C 产品中连接电路的关键环节,其质量优劣对产品性能有着决定性影响。然而,传统人工检测端子焊点不仅效率低下,难以满足大规模生产需求,而且误判率高,无法精准把控产品质量,成为企业提质增效智…...
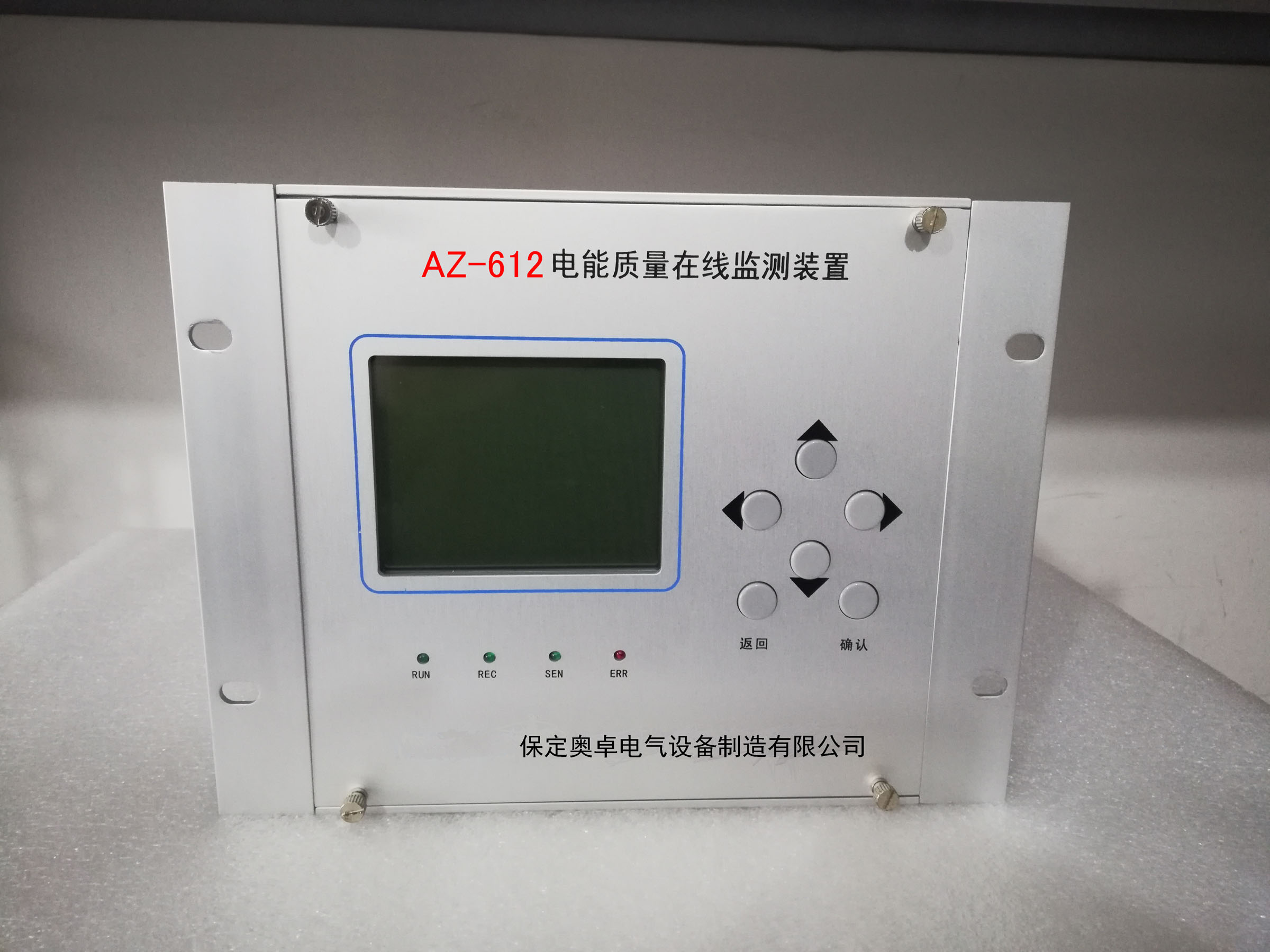
电能质量在线监测分析装置支持实时监测、数据存储及远程传输,适用于电网、工业等场景
电能质量在线监测分析装置主要技术指标 2.1工作电源 交流:220V10% ;50Hz0.5Hz;谐波畸变率不大于15% 直流:220V10%,纹波系数不大于5% 2.2电流信号输入 输入方式:电流互感器输入; …...

Springboot整合JAVAFX
Springboot整合JAVAFX 实体与VO设计 pom.xml文件如下: <?xml version"1.0" encoding"UTF-8"?> <project xmlns"http://maven.apache.org/POM/4.0.0"xmlns:xsi"http://www.w3.org/2001/XMLSchema-instance"xs…...
01分数规划
好久没发博客了……浅浅复活一下,讲个冷门些的算法。 算法目的:选出k组ai,bi使得 最大。 算法过程: 不妨考虑二分答案,那么答案的形式便是 的形式,则可通过移项转化为,进一步的,我们可以将…...

网络安全防护技术
边界安全防护——防火墙 控制:在网络连接点上建立一个安全控制点,对进出数据进行限制隔离:将需要保护的网络与不可信任网络进行隔离,隐藏信息并进行安全防护记录:对进出数据进行检查,记录相关信息 防火墙…...

[数据结构]Trie字典树
GPT的介绍 🧠 一句话总结: 字典树是一种专门用来存很多字符串的“超级前缀树”,查找某个字符串或前缀的时候,特别快! ✍️ 举个生活例子(类比): 你想做一个词典(Dictio…...

【WPF】IOC控制反转的应用:弹窗但不互相调用ViewModel
全称:Inversion of Control,控制反转 场景:A页面需要调用B/C页面等,防止直接在VM中新建别的页面实例,使用IOC设计架构; 创建Service,在Service中实现页面的实例创建和定义页面输入输出参数。 在…...
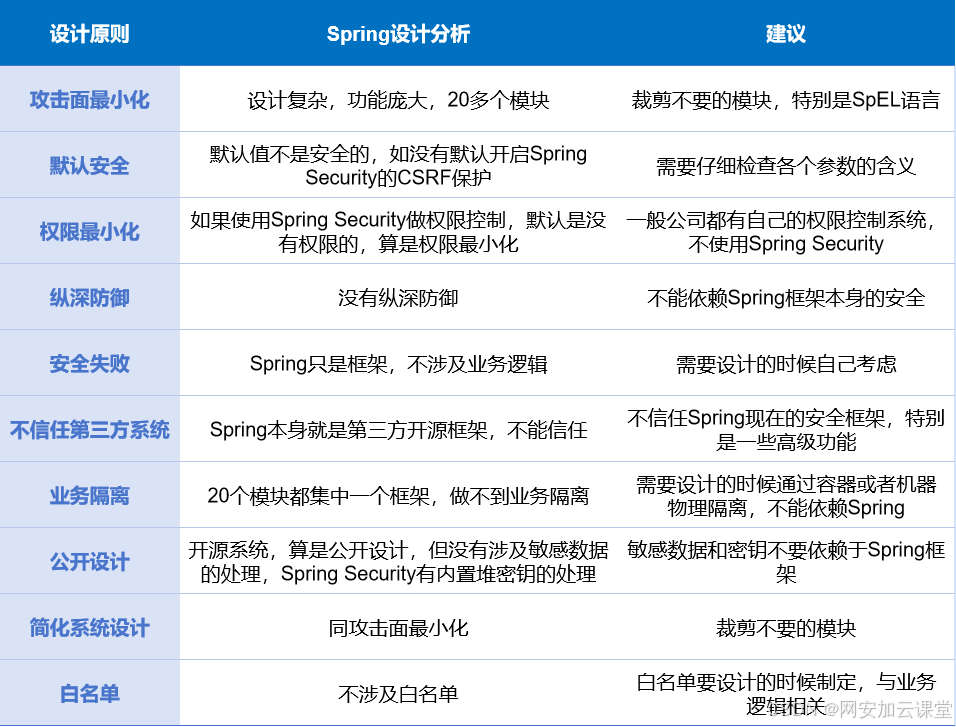
课程分享 | 安全设计原则
讲师介绍 前言 在数字化时代,软件安全已从技术问题升级为关乎企业存亡的战略要务。从SolarWinds供应链攻击到Log4j漏洞风暴,一次次安全事件不断警示我们:传统的边界防护思维已无法应对日益复杂的威胁环境。面对不断演进的攻击手段࿰…...
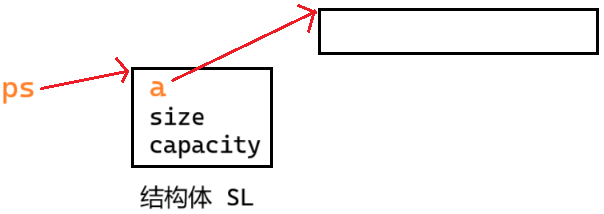
【数据结构 · 初阶】- 单链表
目录 一.相关指针知识点 二.链表 1.为什么学了顺序表还要学链表 2.优点 三.实现 1.链表的打印 —— 理解链表结构 (2) 物理结构图 2.链表的尾插 —— 入门 错误写法:tail ! NULL 总结: 正确代码物理图解: (2) 尾插整体代码 (思考…...
在Linux系统命令行如何使用deepseek官方API调用AI大模型?
在Linux系统命令行如何调用deepseek官方API调用AI大模型? 书接上文: 同样的开头哈哈哈哈: ”在这个AI技术飞速发展的时代,每一个程序员都应该问问自己:如何将人工智能的强大能力融入到我们熟悉的操作系统中ÿ…...

我开源了一个“宝藏”开源项目
我开源了一个“宝藏”开源项目 - AI需求分析项目 | 适合交作业和学习 🚀 前言 大家好!最近在学习软件工程和大模型应用开发的过程中,我发现许多学生都遇到了需求分析AI的题目。把一份需求文档转化为用户故事、实体关系或数据库设计ÿ…...
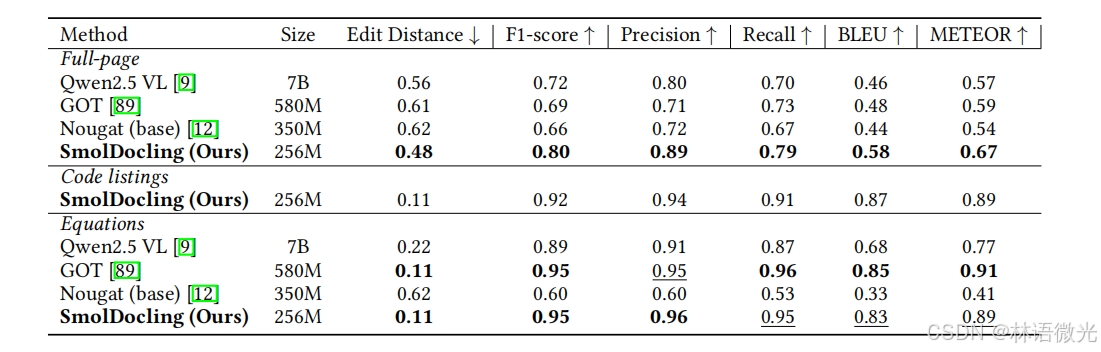
SmolDocling:一种超紧凑的视觉语言模型,用于端到端多模态文档转换
paper地址:SmolDocling: An ultra-compact vision-language model for end-to-end multi-modal document conversion Huggingface地址:SmolDocling-256M-preview 代码对应的权重文件:SmolDocling-256M-preview权重文件 一、摘要 以下是文章摘要的总结: SmolDocling 是一…...
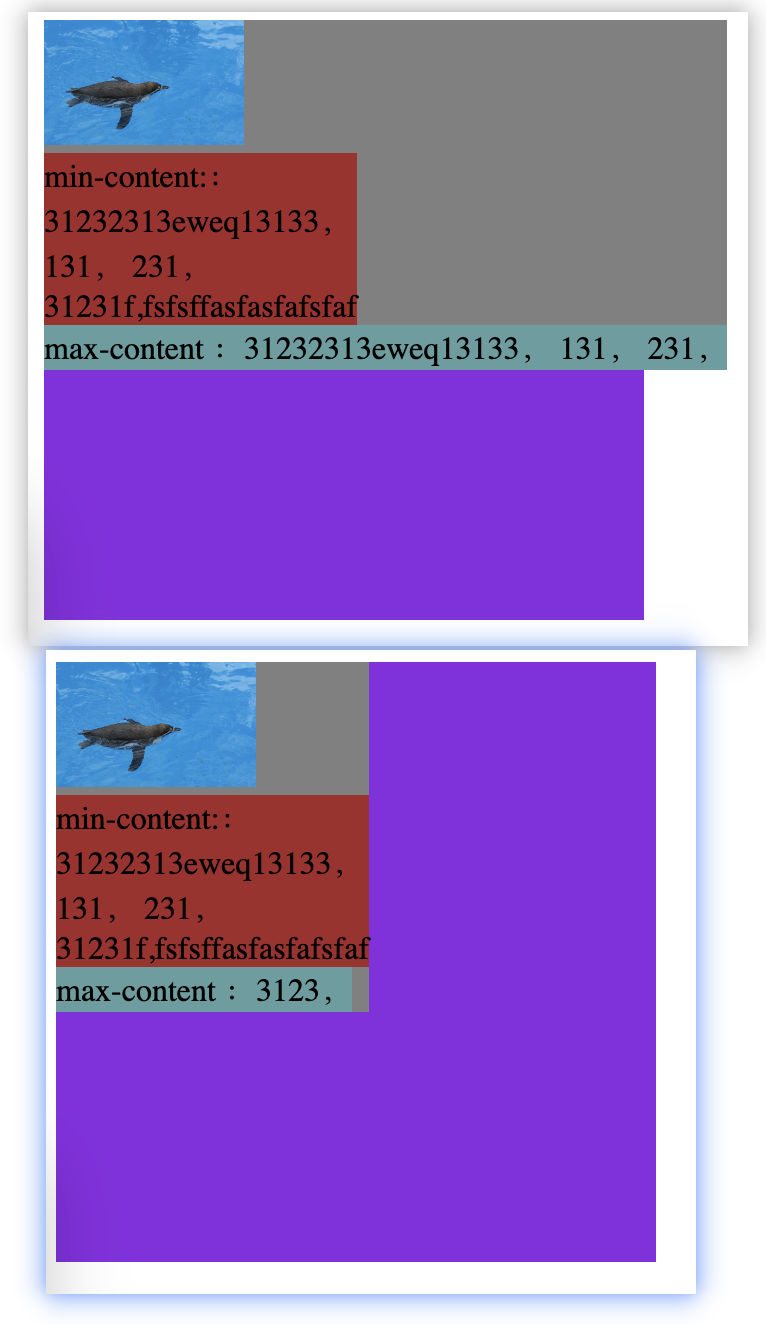
理解CSS3 的 max/min-content及fit-content等width值
本文首发在我的个人博客: 理解CSS3 的 max/min-content及fit-content等width值https://www.brandhuang.com/article/1744253362074 width/height 的属性值 fit-content 这是一个 CSS3 属性,用来设置元素的宽度和高度,值为 fit-content&#…...
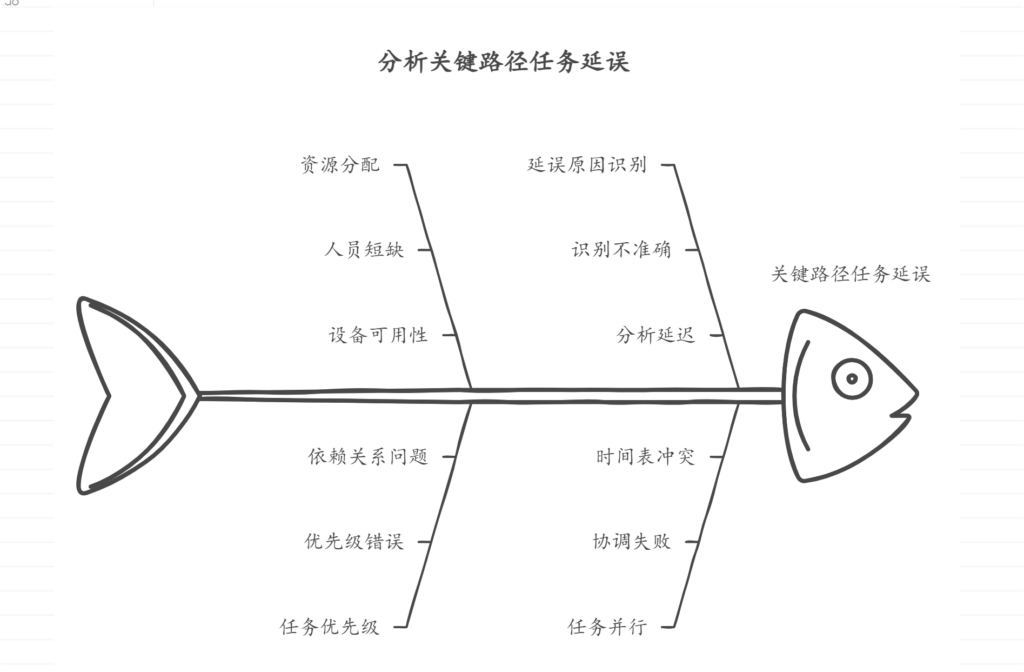
关键路径任务延误,如何快速调整
快速识别延误原因、优化资源配置、实施任务并行、调整任务优先级是关键路径任务延误后快速调整的有效方式。其中,快速识别延误原因尤为重要,需要项目管理者及时发现影响关键路径任务延误的核心问题,通过系统性的分析,确保延误的具…...

Elasticsearch 全面解析
Elasticsearch 全面解析 前言一、简介核心特性应用场景 二、核心原理与架构设计1. 倒排索引(Inverted Index)2. 分片与副本机制(Sharding & Replication)3. 节点角色与集群管理 三、核心特点1. 灵活的查询语言(Que…...
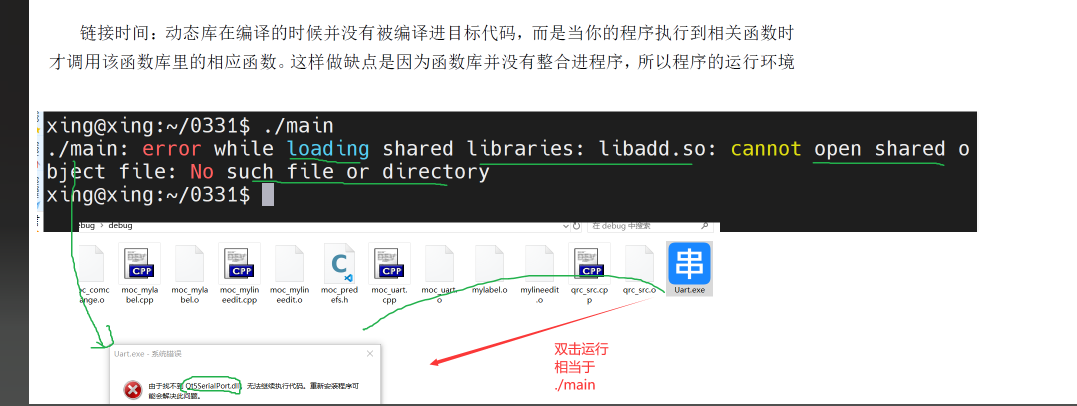
linux入门四:Linux 编译器
一、C 语言编译器 GCC:开启编程之旅 1.1 GCC 安装:一站式工具链 GCC(GNU Compiler Collection)是 Linux 下最常用的 C/C 编译器,支持多种编程语言。安装命令(适用于 Debian/Ubuntu 系统)&…...

springboot集成springcloud vault读值示例
接上三篇 Vault---机密信息管理工具安装及常用示例 Vault机密管理工具集群配置示例 vault签发根证书、中间证书、ca证书流程记录 项目里打算把所有密码都放到vault里管理,vault提供了springcloud vault用来在springboot里连接vault,启动加载vault里的值放…...

什么是虚拟线程?与普通线程的区别
引言:线程的演进与挑战 在传统的并发编程中,线程是一种非常重要的概念。我们使用线程来实现任务的并发执行,从而提高程序的执行效率。普通线程(如 Thread 类)是一种重量级的线程,每个线程都对应着操作系统…...