多模态大模型重塑自动驾驶:技术融合与实践路径全解析
目录
1、 引言:AI与自动驾驶的革命性融合
2、五大领先多模态模型解析
2.1 Qwen2.5-Omni:全模态集大成者
2.2. LLaVA:视觉语言理解专家
2.3. Qwen2-VL:长视频理解能手
2.4. X-InstructBLIP:跨模态理解框架
2.5. MiniCPM-V:端侧轻量优化
2.6. Florence2:易集成视觉模型
3、多模态大模型集成策略:完整数据闭环
3.1.多模态数据采集与预处理
3.2.多模态内容理解与特征提取
3.3.精准指令执行与推理
3.4.应用集成与高阶功能
3.5.数据闭环优化
4、单一模型 vs 多模型协同:自动驾驶的关键决策
4.1多模型组合的弊端
4.2单一模型的优势与局限
5、自动驾驶集成挑战与解决方案
5.1. 实时性要求
5.2. 模型协同机制
5.3. 车规级可靠性
6、实际应用案例
6.1.ADAS数据闭环系统
6.2.智能座舱-驾驶协同系统
7、推荐架构:分层协作模型
7.1.感知层:系统的"眼睛"
7.2.交互层:系统的"嘴巴"和"耳朵"
7.3.车用集成架构示例
8、未来发展趋势
9、结论
1、 引言:AI与自动驾驶的革命性融合
多模态AI模型与自动驾驶技术的融合代表了具有巨大潜力的新兴技术前沿。这种结合不仅提升了自动驾驶系统的感知、推理和决策能力,还为解决复杂道路场景的挑战创造了新机遇。本文将深入探讨多模态大模型在自动驾驶中的应用,对比领先模型的特性,并提供完整的集成策略及实践路径。

2、五大领先多模态模型解析
2.1 Qwen2.5-Omni:全模态集大成者
2025年3月27日,阿里通义千问团队发布了Qwen2.5-Omni,这是Qwen系列中全新的旗舰级多模态大模型,专为全面的多模式感知设计,可以无缝处理包括文本、图像、音频和视频的各种输入,同时支持流式的文本生成和自然语音合成输出。
核心创新:Thinker-Talker架构
- Thinker组件:负责处理和理解多模态输入,如同大脑
- Talker组件:负责流式输出语音,如同嘴巴
- TMRoPE技术:实现视频输入与音频时间戳的同步
Qwen2.5-Omni-7B开源了,采用Apache 2.0许可证,适合在资源受限环境(如车载设备)中部署。
自动驾驶数据闭环综述
2.2. LLaVA:视觉语言理解专家
LLaVA是通过端到端训练的多模态模型,整合视觉编码器和语言模型实现通用视觉语言理解。
LLaVA 1.6主要提升了视觉推理和光学字符识别(OCR)能力。虽然LLaVA 1.6本身主要针对图像输入进行了改进,但其架构设计使其具备处理视频输入的潜力。
LLaVA-NeXT-Video版本采用了AnyRes技术,将视频帧抽取并处理为视觉token序列,从而实现了对视频的有效处理。 CSDN Blog+3Zhihu Zhiwen+3Volcengine Developer Community+3
此外,Video-LLaVA模型进一步扩展了这一功能,通过将图像和视频的视觉表示统一到语言特征空间,使大型语言模型能够同时对图像和视频进行视觉推理。
2.3. Qwen2-VL:长视频理解能手
阿里云开发的第二代视觉语言模型,具备强大的视觉理解和跨模态推理能力。其核心特性包括超长视频理解(20分钟以上)、原生动态分辨率技术支持任意尺寸图像识别、多语言图像/视频文本理解能力和支持自主设备操作的视觉代理能力。
增强版本Qwen2.5-VL具有强化文本/图表/版式视觉识别、10分钟长视频处理与精准片段定位、通过边界框或坐标点生成实现视觉定位,以及支持表格表单结构化输出处理。
2.4. X-InstructBLIP:跨模态理解框架
Salesforce Research、香港科技大学和南洋理工大学联合开发的基于BLIP-2框架的跨模态理解模型,采用指令调优方法。核心特性包括使用Q-Former实现指令感知特征提取、支持图像/视频、音频、3D的跨模态框架、通过指令微调实现零样本泛化能力。
架构由图像编码器(ViT架构)、Q-Former(基于Bert架构)和LLM(FlanT5或Vicuna)组成。
2.5. MiniCPM-V:端侧轻量优化
深度求索与清华NLP实验室联合研发的端侧多模态模型系列,专为资源受限设备设计。核心特性包括轻量高效(最新MiniCPM-V 2.6仅8B参数)、卓越OCR能力(OCRBench 700+分数)、支持多图与视频流处理、通过RLAIF-V优化实现低幻觉率,以及支持30+种语言。
技术实现采用经典架构组合:视觉编码器(SigLIP-400M)、投影器(Perceiver Resampler结构)和语言模型(Qwen2-7B或Llama3-8B)。
2.6. Florence2:易集成视觉模型
微软推出的先进视觉语言模型,相比前代有显著改进,提供实用API和工具帮助开发者集成视觉理解能力。
3、多模态大模型集成策略:完整数据闭环
为有效整合这些模型,需要系统化的实施路径。以下是完整的数据闭环策略。
3.1.多模态数据采集与预处理
技术选型: MiniCPM-V + 定制化数据提取管道
实施要点包括利用MiniCPM-V轻量特性进行初步数据筛选标注、使用OCR能力提取文档/图像文本信息、设计数据质量评估指标与标准化流程,以及部署边缘计算架构实现采集端实时预处理。
3.2.多模态内容理解与特征提取
技术选型: Qwen2-VL + LLaVA + 特征融合框架
实施要点包括使用Qwen2-VL处理复杂图像/长视频提取高层语义特征、部署LLaVA实现细粒度图像理解与视觉问答、设计特征融合算法整合多模型输出,以及构建支持特征相似查询的向量检索系统。
3.3.精准指令执行与推理
技术选型: X-InstructBLIP + 任务路由系统
实施要点包括利用指令感知能力处理复杂多模态任务、设计任务路由系统分配不同类型请求、实现多轮对话中的视觉文本上下文管理,以及开发根据任务复杂度动态调整的推理路径。
3.4.应用集成与高阶功能
技术选型: Florence2 + 定制化服务框架
实施要点包括使用Florence2作为核心系统引擎整合各阶段输出、开发符合统一接口标准的API网关、实现支持可视化报告与数据可视化的多模态内容生成,以及构建收集模型使用数据的用户反馈机制。
3.5.数据闭环优化
技术选型: 自适应学习框架 + 评估指标系统
实施要点包括设计模型性能评估指标(准确率/时延/资源消耗)、开发持续模型评估的自动化测试流程、实现用于模型微调的高质量反馈数据筛选机制,以及构建验证优化效果的A/B测试框架。
4、单一模型 vs 多模型协同:自动驾驶的关键决策
在自动驾驶领域,关于是使用单一全能模型还是多个专精模型的讨论十分关键。
4.1多模型组合的弊端
多个模型串联处理可能导致总时延超标,多模型并行运行可能耗尽计算资源,模型间通信和结果融合需额外设计工作。
4.2单一模型的优势与局限
选择单一模型可以简化系统架构,降低时延和资源需求。然而,功能覆盖不足,难以同时满足感知、决策和交互的所有需求。
5、自动驾驶集成挑战与解决方案
5.1. 实时性要求
挑战:多模型串联可能导致驾驶决策时延超出可接受范围。
解决方案包括模型蒸馏技术实现大模型知识向轻量模型压缩、关键安全决策本地处理与复杂推理云端协同的异步架构,以及基于场景复杂度的动态计算资源调度。
5.2. 模型协同机制
挑战:不同模型输出格式与置信度差异。
解决方案包括管理模型间通信的中央协调器设计、不同模型结果的置信度加权融合,以及实现无缝信息交换的统一表示空间。
5.3. 车规级可靠性
挑战:量产车需要比原型系统更高的可靠性标准。
解决方案包括关键感知任务多模型并行处理的冗余机制、实时评估模型状态的健康监控系统,以及模型故障时保证基本功能的降级策略。
6、实际应用案例
6.1.ADAS数据闭环系统
完整的数据闭环包含:车辆路况数据采集 → MiniCPM-V边缘预处理 → 云端Qwen2-VL语义分析 → 异常场景识别 → X-InstructBLIP复杂场景推理 → 模型性能评估 → 针对性数据增强训练 → 优化模型更新 → OTA车队部署。
该闭环持续优化ADAS系统性能,特别是在复杂场景和边缘案例处理方面。
6.2.智能座舱-驾驶协同系统
整合驾驶员状态监控与环境感知:多模态人机交互 → MiniCPM-V实时意图理解 → Qwen2-VL环境感知融合 → X-InstructBLIP驾驶员状态分析 → Florence2个性化驾驶建议 → 用户反馈收集 → 模型优化。
7、推荐架构:分层协作模型
7.1.感知层:系统的"眼睛"
- 功能:从传感器数据中提取环境信息
- 主要任务:物体检测、场景理解、环境建模、运动估计
- 数据类型:处理图像、点云、雷达信号等低级原始数据
7.2.交互层:系统的"嘴巴"和"耳朵"
- 功能:负责与外部世界的沟通和互动
- 主要任务:人机交互、车车通信、车路通信、车云通信
- 数据类型:处理文本、语音、视觉信号等高级数据
7.3.车用集成架构示例
基于上述分析,最优的自动驾驶AI架构应采用多模型分层协作模式:
感知层:MiniCPM-V(高效端侧处理)或Qwen2-VL(复杂视觉任务)
决策层:X-InstructBLIP(多模态推理)
交互层:Qwen2.5-Omni(人机交互)
+------------------+ +------------------+ +------------------+ | 边缘感知层 | | 云端处理层 | | 决策规划层 | | (MiniCPM-V) | -> | (Qwen2-VL+LLaVA) | -> | (X-InstructBLIP) | +------------------+ +------------------+ +------------------+^ ^ || | v +------------------------------------------+ +------------------+ | 数据管理与优化层 | <- | 集成应用层 | | (数据湖+特征存储+模型版本) | | (Florence2) | +------------------------------------------+ +------------------+^ || v +------------------+ +------------------+ +------------------+ | 车队数据采集 | | 仿真数据生成 | | 应用服务层 | | (传感器网络) | -> | (合成数据) | -> | (API+SDK) | +------------------+ +------------------+ +------------------+
8、未来发展趋势
车规级模型优化:针对车载芯片优化的模型变体,平衡性能与能效 多车协同学习:利用车队数据实现隐私保护的分布式学习 场景自适应部署:根据场景动态调整模型组合 大模型辅助仿真:使用生成模型构建更真实的测试环境
9、结论
多模态大模型在自动驾驶中的应用代表了AI与汽车工业融合的前沿实践。通过构建完整的数据闭环系统实现多模型有机连接,可显著提升系统的感知能力、决策水平和用户体验。尽管单一模型(如Qwen2.5-Omni)具有简化系统架构的优势,但在高要求的自动驾驶场景中,多模型分层协作架构能更好地平衡性能、可靠性和功能覆盖。
随着技术发展,我们可以期待更为高效的模型蒸馏技术、混合部署策略和场景自适应能力,进一步推动自动驾驶向更高水平迈进。正如开源模型Qwen2.5-Omni所展示的那样,多模态AI不仅开放了代码,更开放了无限可能。
相关资源:
- Qwen2.5-Omni GitHub
- Qwen2.5-Omni 论文
- Qwen2.5-Omni 博客
- Qwen2.5-Omni 在线体验
你对多模态AI在自动驾驶中的应用有何看法?欢迎在评论区分享你的见解!
相关文章:
多模态大模型重塑自动驾驶:技术融合与实践路径全解析
目录 1、 引言:AI与自动驾驶的革命性融合 2、五大领先多模态模型解析 2.1 Qwen2.5-Omni:全模态集大成者 2.2. LLaVA:视觉语言理解专家 2.3. Qwen2-VL:长视频理解能手 2.4. X-InstructBLIP:跨模态理解框架 2.5. …...

MySQL 中查询 VARCHAR 类型 JSON 数据的
在数据库设计中,有时我们会将 JSON 数据存储在 VARCHAR 或 TEXT 类型字段中。这种方式虽然灵活,但在查询时需要特别注意。本文将详细介绍如何在 MySQL 中有效查询存储为 VARCHAR 类型的 JSON 数据。 一、问题背景 当 JSON 数据存储在 VARCHAR 列中时&a…...
vue2 el-element中el-select选中值,数据已经改变但选择框中不显示值,需要其他输入框输入值才显示这个选择框才会显示刚才选中的值。
项目场景: <el-table-column label"税率" prop"TaxRate" width"180" align"center" show-overflow-tooltip><template slot-scope"{row, $index}"><el-form-item :prop"InquiryItemList. …...
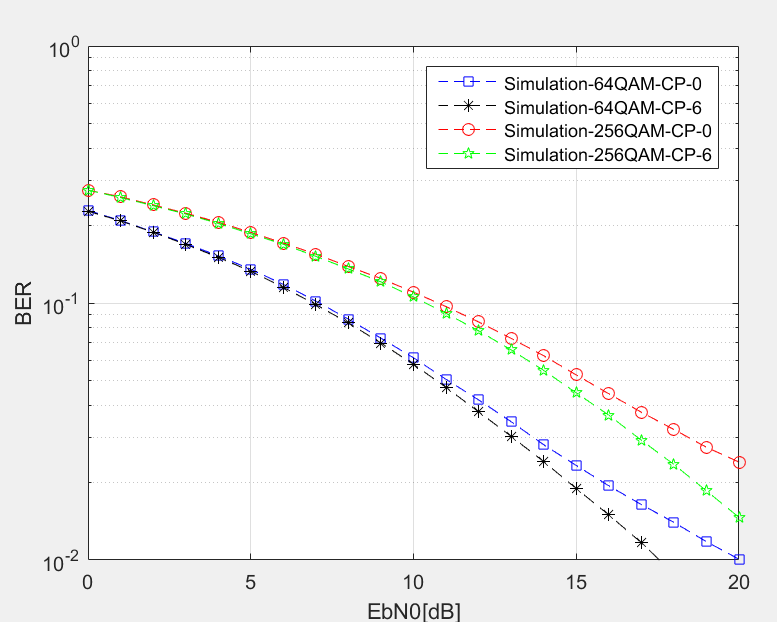
OFDM CP 对解码影响
OFDM符号间会存在ISI,为了解决该问题在符号间插入了循环前缀,可以说这个发明是OFDM能够实用的关键,在多径信道中CP可以有效的解决符号间干扰。3GPP中对于不同SCS 定义了不同的CP长度: 5G Cyclic Prefix (CP) Design -5G Physical …...

oracle em修复之路
很早以前写的文章,再草稿中存放太久了,今天开始整理20年来工作体会,以后陆续发出,希望给大家提供小小的帮助。 去年做的项目使用的oracle数据库,最近要看一下,启动机器进入系统,出现无法加载数…...

STM32学习之ARM内核自带的中断
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨ 📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】 📢:文章若有幸对你有帮助,可点赞 👍…...

【Windows】Win2008服务器SQL服务监控重启脚本
以下是一个用于监控并自动重启 SQL Server 服务的批处理脚本,适用于 Windows Server 2008 和 SQL Server 2012(默认实例): echo off setlocal enabledelayedexpansion:: 配置参数 set SERVICE_NAMEMSSQLSERVER set LOG_FILEC:\SQ…...
技术详解)
大型语言模型中的工具调用(Function Calling)技术详解
一、引言 随着大型语言模型(LLM)能力的飞速发展,它们在自然语言理解、文本生成、对话交互等方面展现出了令人惊叹的表现。然而,LLM 本身并不具备执行外部操作的能力,比如访问网页、调用第三方 API、执行精确数学运算等…...

Vue3.5 企业级管理系统实战(十四):动态主题切换
动态主题切换是针对用户体验的常见的功能之一,我们可以自己实现如暗黑模式、明亮模式的切换,也可以利用 Element Plus 默认支持的强大动态主题方案实现。这里我们探讨的是后者通过 CSS 变量设置的方案。 1 组件准备 1.1 修改 Navbar 组件 在 src/layo…...
解决Ubuntu20.04安装ROS2的问题(操作记录)
一、ROS 系统安装版本选择 每版的Ubuntu系统版本都有与之对应ROS版本,每一版ROS都有其对应版本的Ubuntu版本,切记不可随便装。ROS 和Ubuntu之间的版本对应关系如下:( 可以从这个网站查看ROS2的各个发行版本的介绍信息。ÿ…...

C# 设置Excel中文本的对齐方式、换行、和旋转
在 Excel 中,对齐、换行和旋转是用于设置单元格内容显示方式的功能。合理的设置这些文本选项可以帮助用户更好地组织和展示 Excel 表格中的数据,使表格更加清晰、易读,提高数据的可视化效果。本文将介绍如何在.NET 程序中通过C# 设置Excel单元…...
)
Python 的 re.split()
文章目录 栗子:关键点:进阶用法:对比普通 split():典型应用场景: 如何使用 Python 的 re.split() 方法通过正则表达式分割字符串。 栗子: import re s "apple123banana456orange" print(re.sp…...
【Kettle入门指南】从零开始掌握ETL工具:基础操作与实战案例解析)
大数据(6)【Kettle入门指南】从零开始掌握ETL工具:基础操作与实战案例解析
目录 为什么需要Kettle?一、Kettle基础概念与核心功能1.1 什么是Kettle?1.2 核心组件1.3 优势亮点 二、Kettle安装与快速上手2.1 环境准备2.2 启动Spoon 三、实战案例:从CSV到MySQL的数据迁移与清洗3.1 创建转…...

5.DJI-PSDK:Psdk开发负载与Msdk的应用app进行交互:
DJI-PSDK:Psdk开发负载与Msdk的应用app进行交互: 负载设备和无人机使用数据传输模块,在控制命令传输通道上以透传的方式在PSDK和MSDK间传输控制指令。在高速数据传输通道上以透传的方式在PSDK和MSDK间传输数据信息以及用户自定义的数据。使用数据传输功能,不仅可以设置不同…...
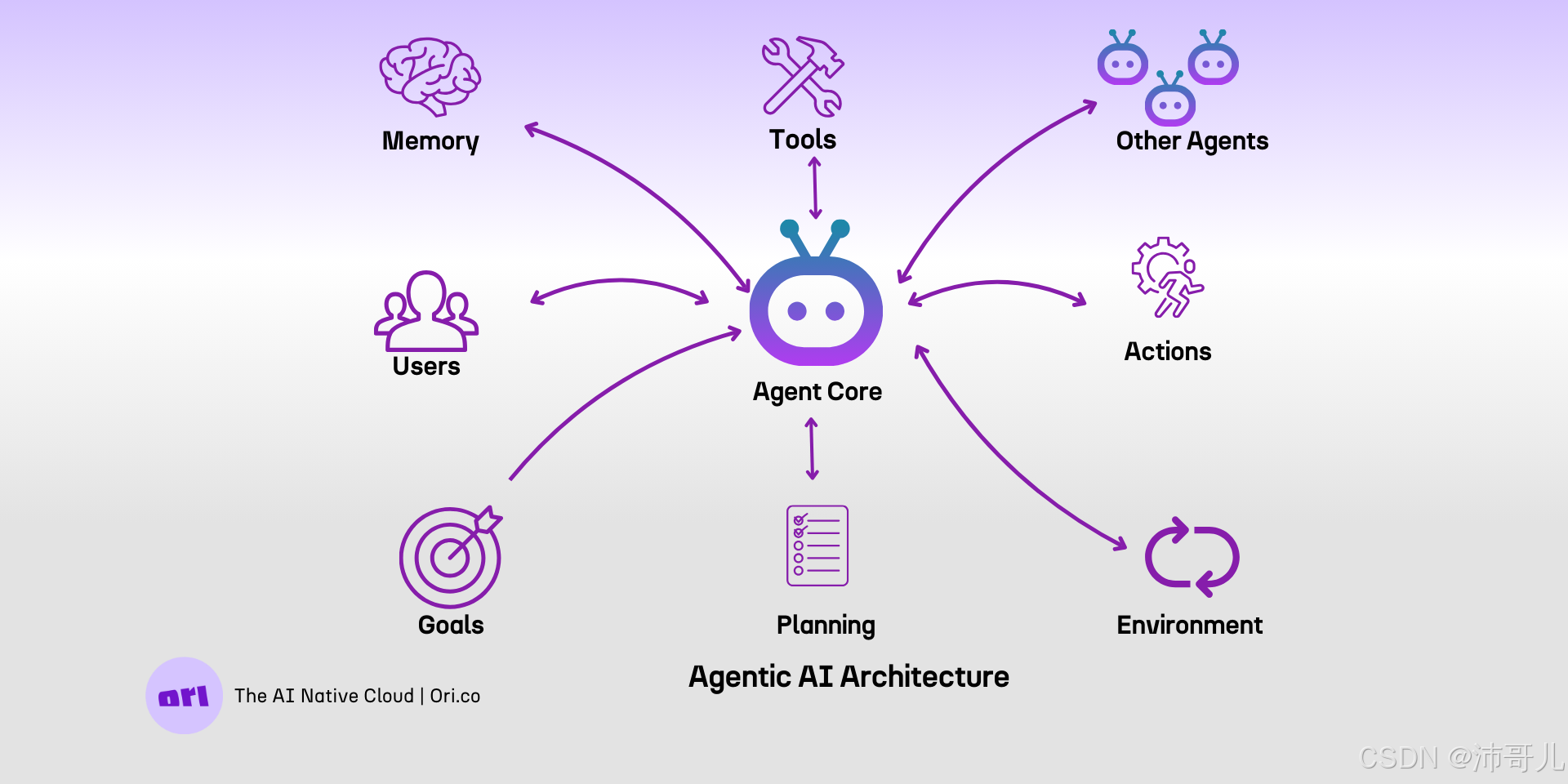
RPA VS AI Agent
图片来源网络 RPA(机器人流程自动化)和AI Agent(人工智能代理)在自动化和智能化领域各自扮演着重要角色,但它们之间存在显著的区别。以下是对两者区别的详细分析: 一、定义与核心功能 RPA(机…...

第三节:React 基础篇-React组件通信方案
React 组件通信方案详解及使用场景 以下是 React 组件通信的常用方法及其适用场景,以层级结构呈现: 一、父子组件通信 1. Props 传递 • 实现方式: • 父组件通过 props 向子组件传递数据。 • 子组件通过回调函数 (onEvent) 通知父组件更…...
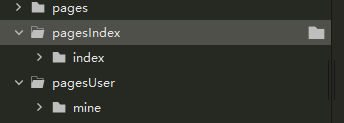
uniapp大文件分包
1. 在pages.json中配置 "subPackages":[{"root":pagesUser,"pages":[{"path":mine/xxx,"style":xxx },{"path":mine/xxx,"style":xxx}]},{"root":pagesIndex,"pages":[{"p…...
Spark-core编程
sortByKey 函数说明 join 函数说明 leftOuterJoin 函数说明 cogroup 函数说明 RDD行动算子: 行动算子就是会触发action的算子,触发action的含义就是真正的计算数据。 reduce 函数说明 collect 函数说明 foreach 函数说明 count 函数说明 first …...

2025年的Android NDK 快速开发入门
十年前写过一篇介绍NDK开发的文章《Android实战技巧之二十三:Android Studio的NDK开发》,今天看来已经发生了很多变化,NDK开发变得更加容易了。下面就写一篇当下NDK开发快速入门。 **原生开发套件 (NDK) **是一套工具,使开发者能…...
基于springboot的“嗨玩旅游网站”的设计与实现(源码+数据库+文档+PPT)
基于springboot的“嗨玩旅游网站”的设计与实现(源码数据库文档PPT) 开发语言:Java 数据库:MySQL 技术:springboot 工具:IDEA/Ecilpse、Navicat、Maven 系统展示 系统功能结构图 局部E-R图 系统首页界面 系统注册…...
React 之 Redux 第三十一节 useDispatch() 和 useSelector()使用以及详细案例
使用 Redux 实现购物车案例 由于 redux 5.0 已经将 createStore 废弃,我们需要先将 reduxjs/toolkit 安装一下; yarn add reduxjs/toolkit// 或者 npm install reduxjs/toolkit使用 vite 创建 React 项目时候 配置路径别名 : // 第一种写法…...

6.1es新特性解构赋值
解构赋值是 ES6(ECMAScript 2015)引入的语法,通过模式匹配从数组或对象中提取值并赋值给变量。: 功能实现 数组解构:按位置匹配值,如 let [a, b] [1, 2]。对象解构:按属性名匹配值,…...

4月12日随笔
今天大风天气的第一天,周六,早上九点半起来听了排球技术台培训。结果一天都没顾得上看教学视频。黄老师说有排球基础的可以试试当主裁,那一定要争取一下! 上午看了两集小排球,然后开始了解一些中介相关信息。因为下午…...

MCP遇见Web3:从边缘计算到去中心化的无限想象
MCP遇见Web3:从边缘计算到去中心化的无限想象 在数字化转型的浪潮中,边缘计算(MCP,Micro Control Protocol)和Web3技术分别在计算效率与去中心化架构上发挥着各自的优势。当两者融合,会碰撞出哪些火花?作为一名技术极客,我最近开始深度研究MCP与Web3工具的集成,试图探…...

Llama 4全面评测:官方数据亮眼,社区测试显不足之处
引言 2025年4月,Meta正式发布了全新的Llama 4系列模型,这标志着Llama生态系统进入了一个全新的时代。Llama 4不仅是Meta首个原生多模态模型,还采用了混合专家(MoE)架构,并提供了前所未有的上下文长度支持。本文将详细介绍Llama 4…...
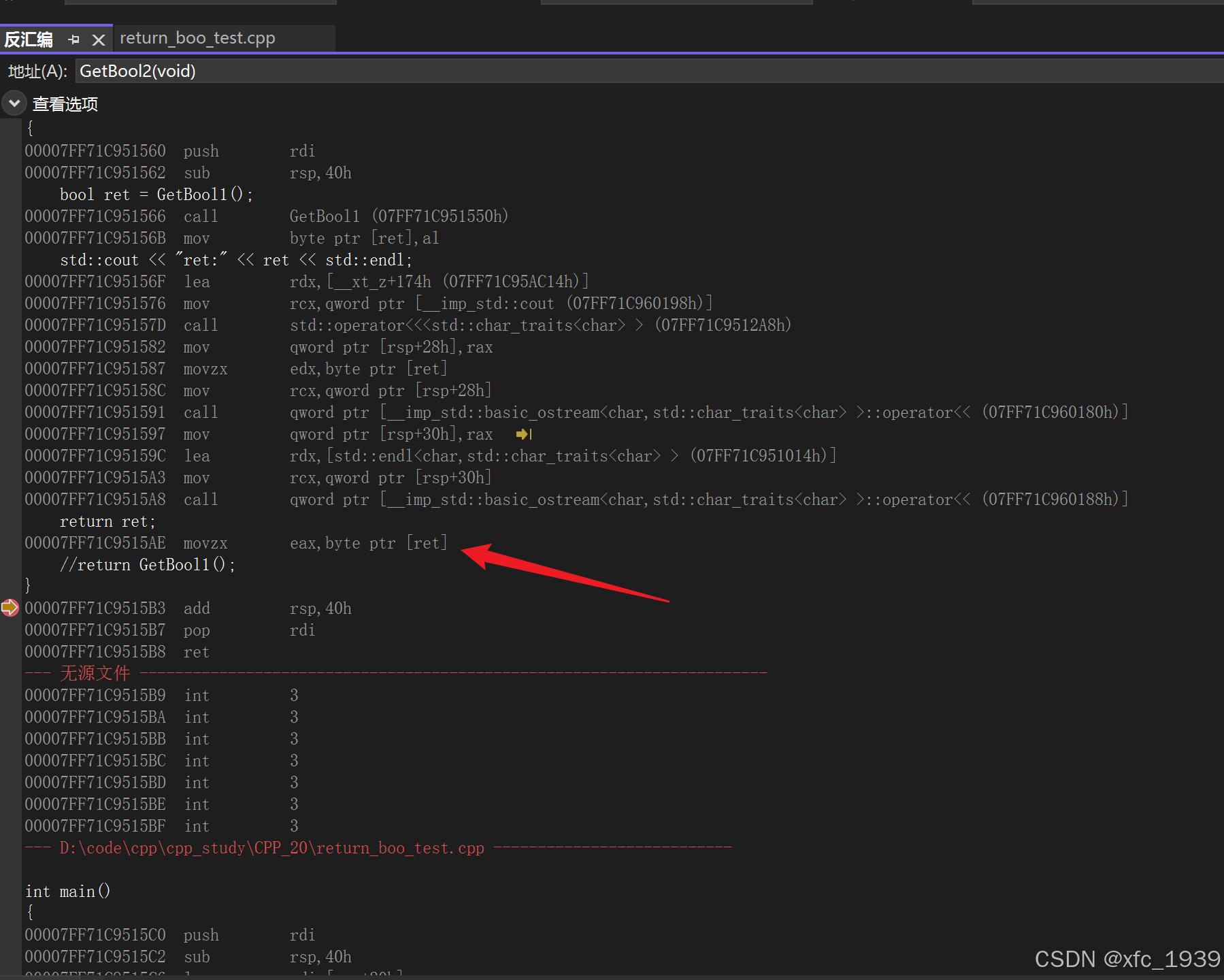
【C++】函数直接返回bool值和返回bool变量差异
函数直接返回bool值和返回bool变量差异 背景 在工作中遇到一个比较诡异的问题,场景是给业务方提供的SDK有一个获取状态的函数GetStatus,函数的返回值类型是bool,在测试过程中发现,SDK返回的是false,但是业务方拿到的…...

游戏盾IP可以被破解吗
游戏盾IP(如上海云盾SDK、腾讯云游戏盾)是专为游戏行业设计的高防服务,旨在抵御DDoS攻击、CC攻击等威胁。其安全性取决于技术架构、防护能力以及运维策略。虽然理论上没有绝对“无法破解”的系统,但游戏盾IP在合理…...

第1节:计算机视觉发展简史
计算机视觉与图像分类概述:计算机视觉发展简史 计算机视觉(Computer Vision)作为人工智能领域的重要分支,是一门研究如何使机器"看"的科学,更具体地说,是指用摄影机和计算机代替人眼对目标进行识…...

ARM内核与寄存器
ARM内核与寄存器详解 目录 ARM架构概述ARM处理器模式 Cortex-M3内核的处理器模式Cortex-A系列处理器模式 ARM寄存器集 通用寄存器程序计数器(PC)链接寄存器(LR)堆栈指针(SP)状态寄存器(CPSR/SPSR) 协处理器寄存器NEON和VFP寄存器寄存器使用规范常见ARM指令与寄存器操作 ARM架…...

Hibernate:让对象与数据库无缝对话的全自动ORM框架
一、为什么需要全自动ORM? 在手动编写SQL的时代,开发者需要在Java代码和数据库表之间来回切换: // Java对象 public class User {private Long id;private String name;// getters and setters }// SQL语句 SELECT * FROM user WHERE id ?…...