计算机视觉——基于YOLOV8 的人体姿态估计训练与推理
概述
自 Ultralytics 发布 YOLOV5 之后,YOLO 的应用方向和使用方式变得更加多样化且简单易用。从图像分类、目标检测、图像分割、目标跟踪到关键点检测,YOLO 几乎涵盖了计算机视觉的各个领域,似乎已经成为计算机视觉领域的“万能工具”。
YOLOV8 姿态估计
人体姿态估计(Human Pose Estimation,简称 HPE)是计算机视觉中的一个重要任务,它旨在检测图像或视频中人体的关键点位置,如头部、四肢和躯干等部位的坐标。YOLO 官方针对 HPE 的模型会在名称后加上 “-pose”,例如 YOLOv8n-pose。目前提供的 HPE 预训练模型是基于 COCO 数据集的 17 个关键点训练而成,具体如下图所示:
COCO 数据集的关键点分布如下:
- 头部和面部:鼻子、左眼、右眼、左耳、右耳,共 5 个关键点。
- 上肢:左肩、右肩、左肘、右肘、左腕、右腕,共 6 个关键点。
- 下肢:左髋、右髋、左膝、右膝、左踝、右踝,共 6 个关键点。
- 躯干:左髋和右髋连接到肩膀,形成躯干的轮廓。
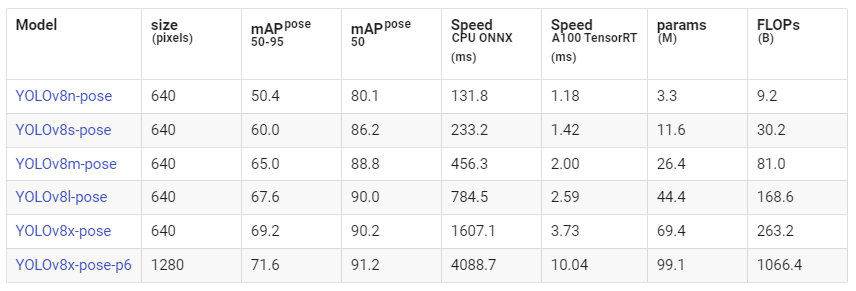
目前 YOLOV8 提供的最大尺寸模型为 YOLOV8X-p6,其输入图像尺寸为 1280×1280,mAP(平均精度)较高,但参数量比 YOLOV8 大了近 30 倍,计算量增加了 118 倍。这种模型虽然精度高,但在实际应用中需要权衡计算资源和实时性。
训练自己的 HPE 模型
Ultralytics 将姿态估计的训练过程封装得非常简单,使得用户可以轻松地训练自己的 HPE 模型。如果需要训练自己的 HPE 模型,可以参考 COCO 数据集中关键点的标注方法,并添加自己的标注图像。COCO 数据集的 17 个关键点标注规则如下:
- 单数编号:表示身体的左侧部位(如左肩、左肘等)。
- 双数编号:表示身体的右侧部位(如右肩、右肘等)。
训练示例代码
以下是使用 Ultralytics 提供的 YOLOV8 进行姿态估计模型训练的示例代码:
from ultralytics import YOLO# 三种训练方式
# 训练一个全新的 YOLOV8N HPE 模型
model = YOLO('yolov8n-pose.yaml')# 载入预训练模型进行训练(推荐方式)
model = YOLO('yolov8n-pose.pt')# 与上一种方式相同,先加载配置文件再加载预训练权重
model = YOLO('yolov8n-pose.yaml').load('yolov8n-pose.pt')# 开始训练
model.train(data='coco8-pose.yaml', epochs=100, imgsz=640)
在训练过程中,需要指定数据集的配置文件(如 coco8-pose.yaml),其中包含数据集的路径、类别信息等。epochs 参数表示训练的轮数,imgsz 参数表示输入图像的尺寸。
直接使用预训练模型进行推理
YOLOV8 官方发布的预训练模型已经能够提供非常不错的目标检测和姿态估计效果。以下是如何直接使用这些预训练模型进行推理的示例。
官方推理示例
from ultralytics import YOLO# 加载模型
model = YOLO('yolov8n-pose.pt') # 加载官方预训练模型
# model = YOLO('path/to/best.pt') # 加载自定义训练的模型# 使用模型进行推理
results = model('https://ultralytics.com/images/bus.jpg') # 对图像进行推理
获取关键点的详细信息
如果需要获取推理结果中各个关键点的详细信息,可以参考以下代码:
# 定义关键点索引与名称的对应关系
dic_points = {0: 'nose', 1: 'left_eye', 2: 'right_eye', 3: 'left_ear', 4: 'right_ear',5: 'left_shoulder', 6: 'right_shoulder', 7: 'left_elbow', 8: 'right_elbow',9: 'left_wrist', 10: 'right_wrist', 11: 'left_hip', 12: 'right_hip',13: 'left_knee', 14: 'right_knee', 15: 'left_ankle', 16: 'right_ankle'
}# 加载模型并进行推理
model = YOLO('yolov8n-pose.pt')
results = model('path/to/image.jpg')# 遍历检测结果
for r in results:boxes = r.boxes # 获取边界框kps = r.keypoints # 获取关键点# 遍历每个检测到的人体实例for p in kps:list_p = p.data.tolist() # 将关键点数据转换为列表# 遍历每个关键点for i, point in enumerate(list_p):# 打印关键点的索引和坐标print(f"Keypoint {i} ({dic_points[i]}): ({int(point[0])}, {int(point[1])})")
关键点的可视化
为了更直观地展示姿态估计的结果,可以通过绘制关键点和连接线来可视化人体姿态。以下是一些示例代码,展示如何绘制头部、躯干、上肢、下肢和脊椎的关键点。
头部关键点
头部的关键点包括双耳、眼睛和鼻子,共 5 个点。以下代码展示了如何绘制这些关键点及其连接线:
import cv2
import numpy as npdef draw_head(img, list_p):# 绘制耳朵、眼睛和鼻子的关键点for p in list_p[:5]:cv2.circle(img, (int(p[0]), int(p[1])), 8, (0, 255, 0), -1)# 绘制眼睛之间的连接线start = (int(list_p[1][0]), int(list_p[1][1]))end = (int(list_p[2][0]), int(list_p[2][1]))cv2.line(img, start, end, (0, 0, 255), 2)# 绘制鼻子到眼睛中点的连接线start = (int((list_p[1][0] + list_p[2][0]) / 2), int((list_p[1][1] + list_p[2][1]) / 2))end = (int(list_p[0][0]), int(list_p[0][1]))cv2.line(img, start, end, (0, 0, 255), 2)# 绘制耳朵之间的连接线start = (int(list_p[3][0]), int(list_p[3][1]))end = (int(list_p[4][0]), int(list_p[4][1]))cv2.line(img, start, end, (0, 0, 255), 2)return img
躯干关键点
躯干的关键点包括肩膀和臀部,共 4 个点。以下代码展示了如何绘制这些关键点及其连接线:
def draw_body(img, list_p):points = []# 绘制肩膀和臀部的关键点for p in [list_p[5], list_p[6], list_p[11], list_p[12]]:cv2.circle(img, (int(p[0]), int(p[1])), 12, (0, 255, 0), -1)point = (int(p[0]), int(p[1]))points.append(point)# 将关键点连接成多边形points = np.array(points)points =points.reshape((-1, 1, 2))isClosed = Truecolor = (0, 0, 255)thickness = 3img = cv2.polylines(img, [points], isClosed, color, thickness)return img
上肢关键点
上肢的关键点包括肩膀、手肘和手腕,共 6 个点。以下代码展示了如何绘制这些关键点及其连接线:
def draw_upper(img, list_p):# 绘制左上肢的关键点和连接线for i, p in enumerate([list_p[5], list_p[7], list_p[9]]):cv2.circle(img, (int(p[0]), int(p[1])), 8, (0, 255, 0), -1)lines = [(5, 7), (7, 9)]for n in lines:start = (int(list_p[n[0]][0]), int(list_p[n[0]][1]))end = (int(list_p[n[1]][0]), int(list_p[n[1]][1]))cv2.line(img, start, end, (0, 0, 255), 3)# 绘制右上肢的关键点和连接线for i, p in enumerate([list_p[6], list_p[8], list_p[10]]):cv2.circle(img, (int(p[0]), int(p[1])), 8, (0, 255, 0), -1)lines = [(6, 8), (8, 10)]for n in lines:start = (int(list_p[n[0]][0]), int(list_p[n[0]][1]))end = (int(list_p[n[1]][0]), int(list_p[n[1]][1]))cv2.line(img, start, end, (0, 0, 255), 3)return img
下肢关键点
下肢的关键点包括臀部、膝盖和脚踝,共 6 个点。以下代码展示了如何绘制这些关键点及其连接线:
def draw_lower(img, list_p):# 绘制左下肢的关键点和连接线for i, p in enumerate([list_p[11], list_p[13], list_p[15]]):cv2.circle(img, (int(p[0]), int(p[1])), 8, (0, 255, 0), -1)lines = [(11, 13), (13, 15)]for n in lines:start = (int(list_p[n[0]][0]), int(list_p[n[0]][1]))end = (int(list_p[n[1]][0]), int(list_p[n[1]][1]))cv2.line(img, start, end, (0, 0, 255), 3)# 绘制右下肢的关键点和连接线for i, p in enumerate([list_p[12], list_p[14], list_p[16]]):cv2.circle(img, (int(p[0]), int(p[1])), 8, (0, 255, 0), -1)lines = [(12, 14), (14, 16)]for n in lines:start = (int(list_p[n[0]][0]), int(list_p[n[0]][1]))end = (int(list_p[n[1]][0]), int(list_p[n[1]][1]))cv2.line(img, start, end, (0, 0, 255), 3)return img
脊椎关键点
脊椎的关键点可以通过连接鼻子、肩膀中心和臀部中心来表示。以下代码展示了如何绘制这些关键点及其连接线:
def draw_spine(img, list_p):# 计算肩膀中心点shoulder_center = ((list_p[5][0] + list_p[6][0]) / 2, (list_p[5][1] + list_p[6][1]) / 2)# 计算臀部中心点hip_center = ((list_p[11][0] + list_p[12][0]) / 2, (list_p[11][1] + list_p[12][1]) / 2)# 绘制关键点cv2.circle(img, (int(shoulder_center[0]), int(shoulder_center[1])), 12, (0, 255, 0), -1)cv2.circle(img, (int(hip_center[0]), int(hip_center[1])), 12, (0, 255, 0), -1)# 绘制连接线cv2.line(img, (int(list_p[0][0]), int(list_p[0][1])), (int(shoulder_center[0]), int(shoulder_center[1])), (0, 0, 255), 3)cv2.line(img, (int(shoulder_center[0]), int(shoulder_center[1])), (int(hip_center[0]), int(hip_center[1])), (0, 0, 255), 3)return img
应用场景
将所有关键点和连接线绘制在一起,可以得到完整的人体姿态估计结果,如下图所示:

这种姿态估计技术可以应用于多种场景,例如:
- 人员识别:在监控视频中识别人员的行走姿态,即使面部模糊或较小,也能通过姿态特征进行识别。
- 运动分析:分析运动员的动作,帮助教练进行技术指导。
- 康复治疗:辅助医生评估患者的康复情况,通过姿态变化监测康复进度。
总结
通过 YOLOV8 的姿态估计功能,我们可以轻松地检测图像或视频中人体的关键点,并将其可视化。这为计算机视觉领域的多种应用提供了强大的支持。未来,我们可以进一步探索如何利用这些关键点信息来提高人员识别的准确性,或者将其应用于其他更具挑战性的任务中。
相关文章:
计算机视觉——基于YOLOV8 的人体姿态估计训练与推理
概述 自 Ultralytics 发布 YOLOV5 之后,YOLO 的应用方向和使用方式变得更加多样化且简单易用。从图像分类、目标检测、图像分割、目标跟踪到关键点检测,YOLO 几乎涵盖了计算机视觉的各个领域,似乎已经成为计算机视觉领域的“万能工具”。 Y…...

鸿蒙小案例---心情日记
效果演示 代码实现 import { router, window } from kit.ArkUIEntry Component struct Index {async aboutToAppear(): Promise<void> {let w await window.getLastWindow(getContext())w.setWindowSystemBarProperties({statusBarColor: #00C6C3,statusBarContentColo…...

力扣第206场周赛
周赛链接:竞赛 - 力扣(LeetCode)全球极客挚爱的技术成长平台 1. 二进制矩阵中的特殊位置 给定一个 m x n 的二进制矩阵 mat,返回矩阵 mat 中特殊位置的数量。 如果位置 (i, j) 满足 mat[i][j] 1 并且行 i 与列 j 中…...

从 SYN Flood 到 XSS:常见网络攻击类型、区别及防御要点
常见的网络攻击类型 SYN Flood、DoS(Denial of Service) 和 DDoS(Distributed Denial of Service) 是常见的网络攻击类型,它们的目标都是使目标系统无法正常提供服务。以下是它们的详细说明: 1. SYN Flood…...

el-tree 实现树形菜单子级取消选中后父级选中效果不变
背景 在复杂的企业级管理系统中,树形菜单是一种常见的数据展示和交互组件。传统的树形菜单通常存在以下交互局限: 子节点取消选中时,父节点会自动取消选中无法满足复杂的权限分配和数据筛选场景实际应用场景: 组织架构权限管理多层级资源分配复杂的数据筛选与展示实现需求…...

Java虚拟机——JVM(Java Virtual Machine)解析一
1.JVM是什么? 1.1 JVM概念 Java Virtual Machine (JVM) 是JDK的核心组件之一,它使得 Java 程序能够在任何支持 JVM 的设备或操作系统上运行,而无需修改源代码 JDK是什么,JDK和JVM是什么关系?1.Java IDE(Integrated …...

开源的PMPI库实现及示例代码
开源的PMPI库实现及示例代码 PMPI (Profiling MPI) 是MPI标准中定义的接口,允许开发者通过拦截MPI调用进行性能测量和调试。以下是几个常用的开源PMPI库实现: 1. MPICH的PMPI接口 MPICH本身提供了PMPI接口,可以直接使用。 2. OpenMPI的PM…...
【源码】SpringMvc源码分析
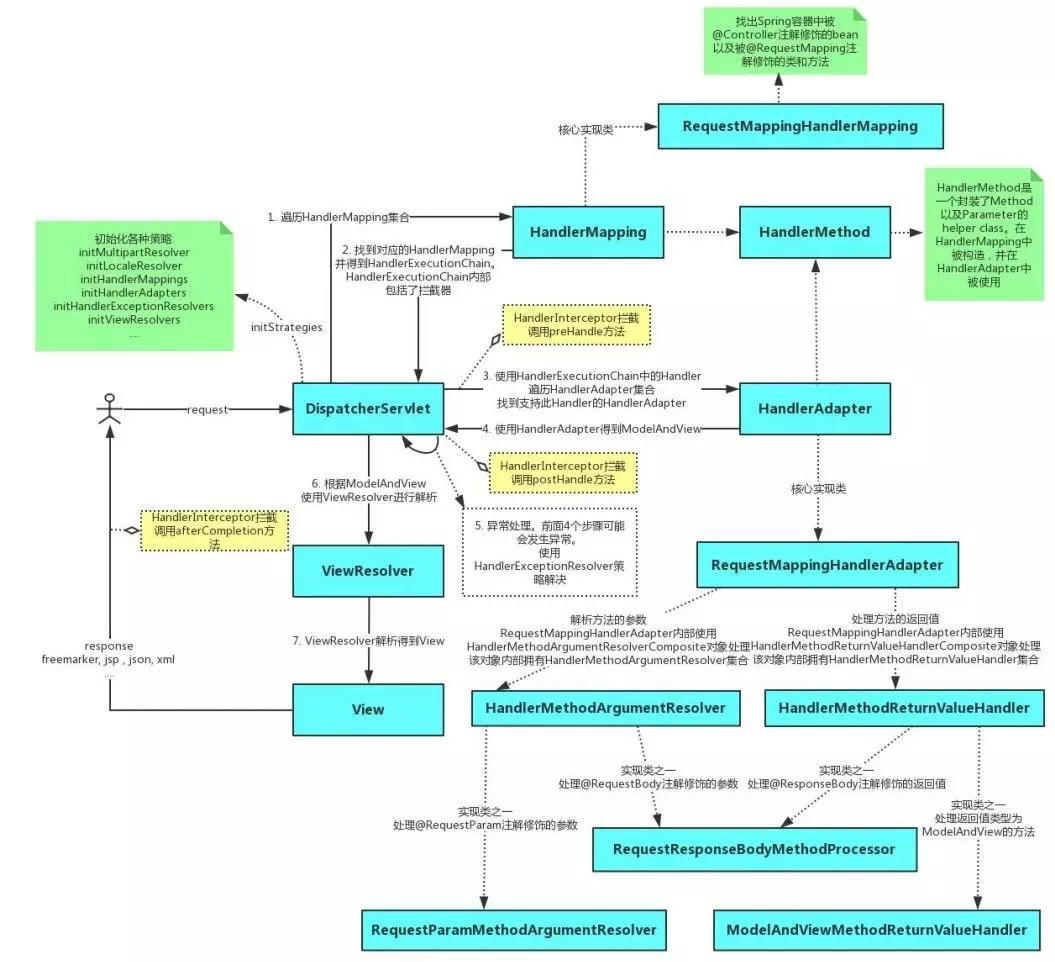
文章目录 SpringMVC 基础回顾核心组件源码分析DispatcherServletHandlerMappingHandlerAdapterViewResolver 请求处理流程源码解析 在当今的 Java Web 开发领域,SpringMVC 无疑是最为广泛应用的 Web 框架之一。它以其强大的功能、灵活的配置以及高度的…...

tcp特点+TCP的状态转换图+time_wait详解
tcp特点TCP的状态转换图time wait详解 目录 一、tcp特点解释 1.1 面向连接 1.1.1 连接建立——三次握手 1.1.2 连接释放——四次挥手 1.2 可靠的 1.2.1 应答确认 1.2.2 超时重传 1.2.3 乱序重排 1.2.4 去重 1.2.5 滑动窗口进行流量控制 1.3 流失服务(字节…...

高支模自动化监测解决方案
1.行业现状 高大模板支撑系统在浇筑施工过程中,诸多重大安全风险点进行实时自动化安全监测的解决方案主要监测由于顶杆失稳、扣件失效、承压过大等引起的支撑轴力、模板沉降、相对位移、支撑体系倾斜等参数变化。系统采用无线自动组网、高频连续采样,实时…...

Node.js EventEmitter 深入解析
Node.js EventEmitter 深入解析 概述 Node.js 作为一种强大的 JavaScript 运行环境,以其异步、事件驱动特性在服务器端编程中占据了重要地位。EventEmitter 是 Node.js 中处理事件的一种机制,它允许对象(称为“发射器”)发出事件…...
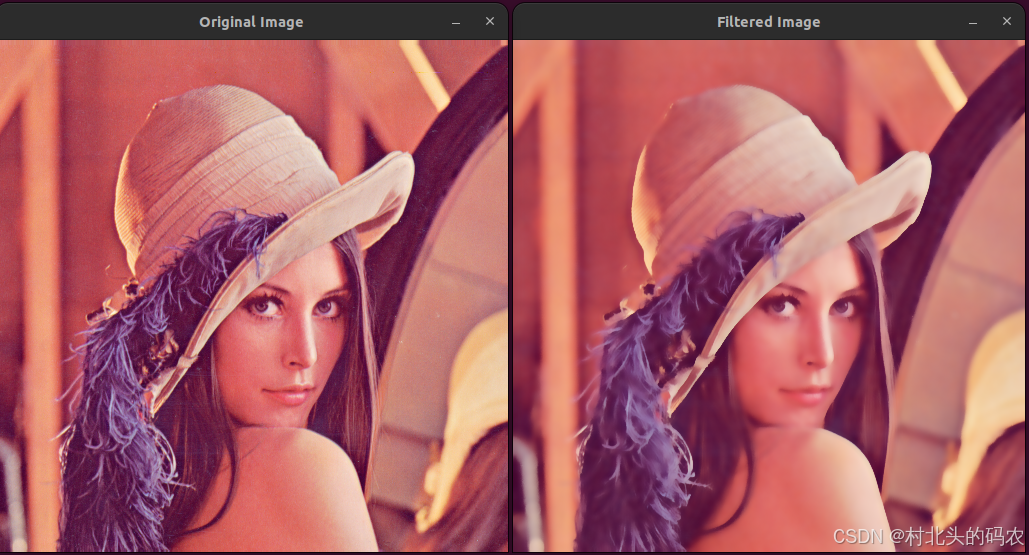
OpenCV 图形API(24)图像滤波-----双边滤波函数bilateralFilter()
操作系统:ubuntu22.04 OpenCV版本:OpenCV4.9 IDE:Visual Studio Code 编程语言:C11 算法描述 应用双边滤波到图像。 该函数对输入图像应用双边滤波,如 http://www.dai.ed.ac.uk/CVonline/LOCAL_COPIES/MANDUCHI1/Bilateral_Fil…...

单双线程的理解 和 lua基础语法
1.什么是单进程 ,什么是多进程 当一个程序开始运行时,它就是一个进程,进程包括运行中的程序和程序所使用到的内存和系统资源。而一个进程又是由单个或多个线程所组成的。 1.1 像apache nginx 这类 服务器中间件就是多进程的软件 ࿰…...
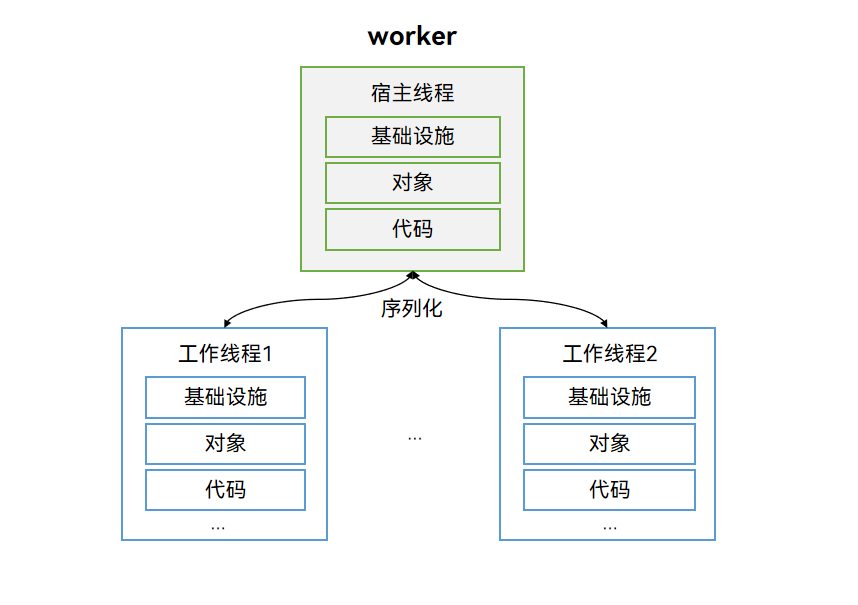
HarmonyOS中的多线程并发机制
目录 多线程并发1. 多线程并发概述2 多线程并发模型3 TaskPool简介4 Worker简介4.1 Woker注意事项4.2 Woker基本用法示例 5. TaskPool和Worker的对比5.1 实现特点对比5.2 适用场景对比 多线程并发 1. 多线程并发概述 并发模型是用来实现不同应用场景中并发任务的编程模型&…...

机器学习 | 强化学习方法分类汇总 | 概念向
文章目录 📚Model-Free RL vs Model-Based RL🐇核心定义🐇核心区别📚Policy-Based RL vs Value-Based RL🐇核心定义🐇 核心区别📚Monte-Carlo update vs Temporal-Difference update🐇核心定义🐇核心区别📚On-Policy vs Off-Policy🐇核心定义🐇核心区别…...

构件与中间件技术:概念、复用、分类及标准全解析
以下是对构件与中间件技术相关内容更详细的介绍: 一、构件与中间件技术的概念 1.构件技术 定义:构件是具有特定功能、可独立部署和替换的软件模块,它遵循一定的规范和接口标准,能够在不同的软件系统中被复用。构件技术就是以构…...
【随手笔记】QT避坑一(串口readyRead信号不产生)
问题描述: 使用QT5.15.2版本 测试串口readyRead绑定槽函数,接收到数据后 不能触发 试了很多网友的程序,他们的发布版本可以,但是源码我编译后就不能触发,判断不是代码的问题 看到有人提到QT版本的问题,于…...

基于 RabbitMQ 优先级队列的订阅推送服务详细设计方案
基于 RabbitMQ 优先级队列的订阅推送服务详细设计方案 一、架构设计 分层架构: 订阅管理层(Spring Boot)消息分发层(RabbitMQ Cluster)推送执行层(Spring Cloud Stream)数据存储层(Redis + MySQL)核心组件: +-------------------+ +-------------------+ …...

5.11 GitHub API调试五大高频坑:从JSON异常到异步阻塞的实战避坑指南
GitHub API调试五大高频坑:从JSON异常到异步阻塞的实战避坑指南 关键词:GitHub API 调试、JSON 解析异常、提示工程优化、异步任务阻塞、数据清洗策略 5.5 测试与调试:调试常见问题 问题1:GitHub API 调用异常 现象: requests.exceptions.HTTPError: 403 Client Error…...

反序列化漏洞介绍与挖掘指南
目录 反序列化漏洞介绍与挖掘指南 一、漏洞核心原理与危害 二、漏洞成因与常见场景 1. 漏洞根源 2. 高危场景 三、漏洞挖掘方法论 1. 静态分析 2. 动态测试 3. 利用链构造 四、防御与修复策略 1. 代码层防护 2. 架构优化 3. 运维实践 五、工具与资源推荐 总结 反…...

【产品】ToB产品需求分析
需求分析流程 合格产品经理 帮助用户、引导用户、分析需求、判断需求、设计方案 不能苛求用户提出合理、严谨的需求,这不是用户的责任和义务,而应该通过自己的专业能力来完成需求的采集工作 #mermaid-svg-ASu8vocank48X6FI {font-family:"trebuche…...
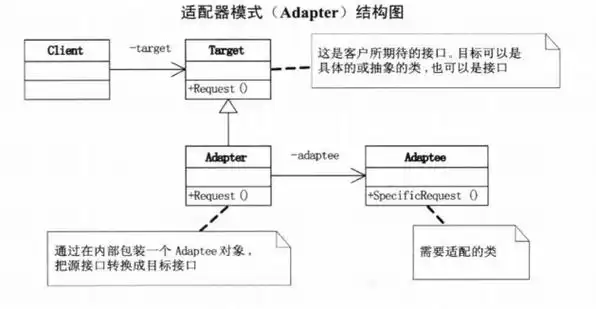
驱动开发硬核特训 · Day 10 (理论上篇):设备模型 ≈ 运行时的适配器机制
🔍 B站相应的视屏教程: 📌 内核:博文视频 - 总线驱动模型实战全解析 敬请关注,记得标为原始粉丝。 在 Linux 驱动开发中,设备模型(Device Model)是理解驱动架构的核心。而从软件工程…...

AWS服务器 磁盘空间升级到100G后,怎么使其生效?
在AWS(Amazon Web Services)上扩展EBS(Elastic Block Store)卷的大小后,服务器操作系统并不会自动识别新增的空间。要使操作系统识别并使用新增的磁盘空间,您需要进行一些额外的步骤。以下是详细的指导和说…...
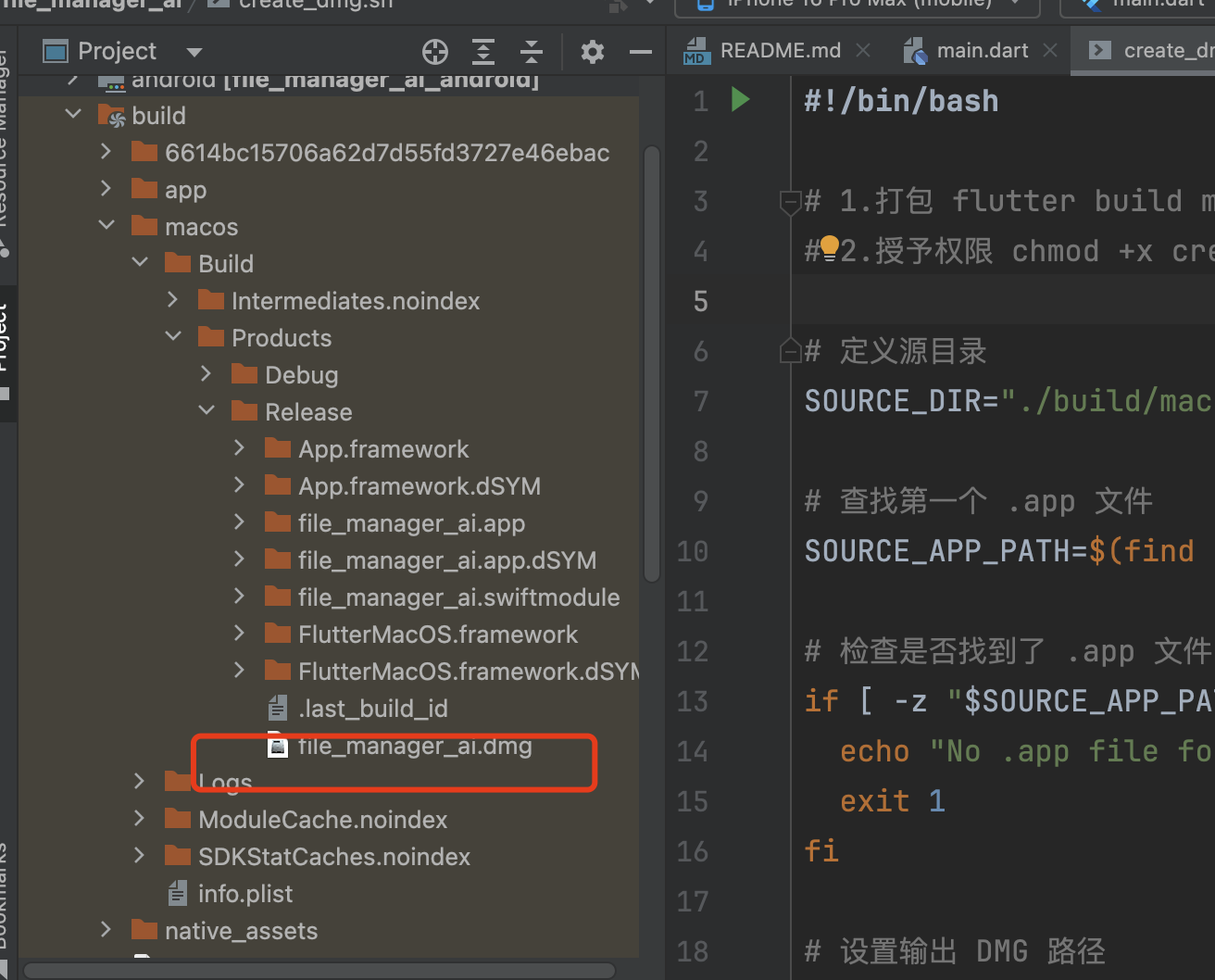
flutter 打包mac程序 dmg教程
✅ 前提条件 ✅ 你已经在 macOS 上安装了 Android Studio Flutter SDK。 ✅ Flutter 支持 macOS 构建。 运行下面命令确认是否支持: Plain Text bash 复制编辑 flutter doctor ---## 🧱 第一步:启用 macOS 支持如果是新项目,…...
【数据结构与算法】——堆(补充)
前言 上一篇文章讲解了堆的概念和堆排序,本文是对堆的内容补充 主要包括:堆排序的时间复杂度、TOP 这里写目录标题 前言正文堆排序的时间复杂度TOP-K 正文 堆排序的时间复杂度 前文提到,利用堆的思想完成的堆排序的代码如下(包…...
atypica.AI:用「语言模型」为「主观世界」建模
人们不是在处理概率,而是在处理故事。 —— 丹尼尔卡尼曼 People dont choose between things, they choose between descriptions of things. —— Daniel Kahneman 商业研究是一门理解人类决策的学问。人并不只是根据纯粹理性做决策,而是受到叙事、情…...
LLaMA-Factory双卡4090微调DeepSeek-R1-Distill-Qwen-14B医学领域
unsloth单卡4090微调DeepSeek-R1-Distill-Qwen-14B医学领域后,跑通一下多卡微调。 1,准备2卡RTX 4090 2,准备数据集 医学领域 pip install -U huggingface_hub export HF_ENDPOINThttps://hf-mirror.com huggingface-cli download --resum…...

【WPF】自定义控件:ShellEditControl-同列单元格编辑支持文本框、下拉框和弹窗
需要实现表格同一列,单元格可以使用文本框直接输入编辑、下拉框选择和弹窗,文本框只能输入数字,弹窗中的数据是若干位的二进制值。 本文提供了两种实现单元格编辑状态下,不同编辑控件的方法: 1、DataTrigger控制控件的…...
)
21天Python计划:零障碍学语法(更新完毕)
目录 序号标题链接day1Python下载和开发工具介绍https://blog.csdn.net/XiaoRungen/article/details/146583769?spm1001.2014.3001.5501day2数据类型、字符编码、文件处理https://blog.csdn.net/XiaoRungen/article/details/146603325?spm1011.2415.3001.5331day3基础语法与…...

深入剖析C++单例模式的八种实现演进与工程实践
深入剖析C单例模式的八种实现演进与工程实践 一、从基础到工业级:单例模式的演进图谱 1.1 基础实现的致命缺陷分析 // 初级版(非线程安全) class NaiveSingleton { public:static NaiveSingleton* getInstance() {if (!instance) {instanc…...