【Linux 并发与竞争实验】
【Linux 并发与竞争实验】
之前学习了四种常用的处理并发和竞争的机制:原子操作、自旋锁、信号量和互斥体。本章我们就通过四个实验来学习如何在驱动中使用这四种机制。
文章目录
- 【Linux 并发与竞争实验】
- 1.原子操作实验
- 1.1 实验程序编写
- 1.2 运行测试
- 2.自旋锁实验
- 2.1 实验程序编写
- 2.2 运行测试
- 3.信号量实验
- 3.1 实验程序编写
- 3.2 运行测试
- 4.互斥体实验
- 4.1 实验程序编写
- 4.2 运行测试
1.原子操作实验
本例程我们在《【Linux驱动开发】pinctrl 和 gpio 子系统实验》的 gpioled.c 文件基础上完成。在本节使用中我们使用原子操作来实现对 LED 这个设备的互斥访问,也就是一次只允许一个应用程序可以使用 LED 灯。
1.1 实验程序编写
1、修改设备树文件
因为本章实验是在《【Linux驱动开发】pinctrl 和 gpio 子系统实验》的基础上完成的,因此不需要对设备树做任何的修改。
链接地址:https://blog.csdn.net/v13111329954/article/details/146533517?spm=1001.2014.3001.5501
2、LED 驱动修改
本节实验在实验驱动文件 gpioled.c 的基础上修改而来。重命名为 atomic.c。
本节实验重点就是使用atomic 来实现一次只能允许一个应用访问 LED,所以我们只需要在 atomic.c 文件源码的基础上加上添加 atomic 相关代码即可,完成以后的 atomic.c 文件内容如下所示:
atomic.c
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>#define GPIOLED_CNT 1 /* 设备号个数 */
#define GPIOLED_NAME "gpioled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 *//* gpioled设备结构体 */
struct gpioled_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */int minor; /* 次设备号 */struct device_node *nd; /* 设备节点 */int led_gpio; /* led所使用的GPIO编号 */atomic_t lock; /* 原子变量 */
};struct gpioled_dev gpioled; /* led设备 *//** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int led_open(struct inode *inode, struct file *filp)
{/* 通过判断原子变量的值来检查LED有没有被别的应用使用 */if (!atomic_dec_and_test(&gpioled.lock)) {atomic_inc(&gpioled.lock); /* 小于0的话就加1,使其原子变量等于0 */return -EBUSY; /* LED被使用,返回忙 */}filp->private_data = &gpioled; /* 设置私有数据 */return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{return 0;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue;unsigned char databuf[1];unsigned char ledstat;struct gpioled_dev *dev = filp->private_data;retvalue = copy_from_user(databuf, buf, cnt);if(retvalue < 0) {printk("kernel write failed!\r\n");return -EFAULT;}ledstat = databuf[0]; /* 获取状态值 */if(ledstat == LEDON) { gpio_set_value(dev->led_gpio, 0); /* 打开LED灯 */} else if(ledstat == LEDOFF) {gpio_set_value(dev->led_gpio, 1); /* 关闭LED灯 */}return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int led_release(struct inode *inode, struct file *filp)
{struct gpioled_dev *dev = filp->private_data;/* 关闭驱动文件的时候释放原子变量 */atomic_inc(&dev->lock);return 0;
}/* 设备操作函数 */
static struct file_operations gpioled_fops = {.owner = THIS_MODULE,.open = led_open,.read = led_read,.write = led_write,.release = led_release,
};/** @description : 驱动出口函数* @param : 无* @return : 无*/
static int __init led_init(void)
{int ret = 0;/* 初始化原子变量 */atomic_set(&gpioled.lock, 1); /* 原子变量初始值为1 *//* 设置LED所使用的GPIO *//* 1、获取设备节点:gpioled */gpioled.nd = of_find_node_by_path("/gpioled");if(gpioled.nd == NULL) {printk("gpioled node not find!\r\n");return -EINVAL;} else {printk("gpioled node find!\r\n");}/* 2、 获取设备树中的gpio属性,得到LED所使用的LED编号 */gpioled.led_gpio = of_get_named_gpio(gpioled.nd, "led-gpio", 0);if(gpioled.led_gpio < 0) {printk("can't get led-gpio");return -EINVAL;}printk("led-gpio num = %d\r\n", gpioled.led_gpio);/* 3、设置GPIO1_IO03为输出,并且输出高电平,默认关闭LED灯 */ret = gpio_direction_output(gpioled.led_gpio, 1);if(ret < 0) {printk("can't set gpio!\r\n");}/* 注册字符设备驱动 *//* 1、创建设备号 */if (gpioled.major) { /* 定义了设备号 */gpioled.devid = MKDEV(gpioled.major, 0);register_chrdev_region(gpioled.devid, GPIOLED_CNT, GPIOLED_NAME);} else { /* 没有定义设备号 */alloc_chrdev_region(&gpioled.devid, 0, GPIOLED_CNT, GPIOLED_NAME); /* 申请设备号 */gpioled.major = MAJOR(gpioled.devid); /* 获取分配号的主设备号 */gpioled.minor = MINOR(gpioled.devid); /* 获取分配号的次设备号 */}printk("gpioled major=%d,minor=%d\r\n",gpioled.major, gpioled.minor); /* 2、初始化cdev */gpioled.cdev.owner = THIS_MODULE;cdev_init(&gpioled.cdev, &gpioled_fops);/* 3、添加一个cdev */cdev_add(&gpioled.cdev, gpioled.devid, GPIOLED_CNT);/* 4、创建类 */gpioled.class = class_create(THIS_MODULE, GPIOLED_NAME);if (IS_ERR(gpioled.class)) {return PTR_ERR(gpioled.class);}/* 5、创建设备 */gpioled.device = device_create(gpioled.class, NULL, gpioled.devid, NULL, GPIOLED_NAME);if (IS_ERR(gpioled.device)) {return PTR_ERR(gpioled.device);}return 0;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit led_exit(void)
{/* 注销字符设备驱动 */cdev_del(&gpioled.cdev);/* 删除cdev */unregister_chrdev_region(gpioled.devid, GPIOLED_CNT); /* 注销设备号 */device_destroy(gpioled.class, gpioled.devid);class_destroy(gpioled.class);
}module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("jvmao");
第 33 行,原子变量 lock,用来实现一次只能允许一个应用访问 LED 灯,led_init 驱动入口函数会将 lock 的值设置为 1。
第 48~51 行,每次调用 open 函数打开驱动设备的时候先申请 lock,如果申请成功的话就表示LED灯还没有被其他的应用使用,如果申请失败就表示 LED灯正在被其他的应用程序使用。每次打开驱动设备的时候先使用 atomic_dec_and_test 函数将 lock 减 1,如果 atomic_dec_and_test函数返回值为真就表示 lock 当前值为 0,说明设备可以使用。如果 atomic_dec_and_test 函数返回值为假,就表示 lock 当前值为负数(lock 值默认是 1),lock 值为负数的可能性只有一个,那就是其他设备正在使用 LED。其他设备正在使用 LED 灯,那么就只能退出了,在退出之前调用函数 atomic_inc 将 lock 加 1,因为此时 lock 的值被减成了负数,必须要对其加 1,将 lock 的值变为 0。
第 111 行,LED 灯使用完毕,应用程序调用 close 函数关闭的驱动文件,led_release 函数执行,调用 atomic_inc 释放 lcok,也就是将 lock 加 1。
第 134 行,初始化原子变量 lock,初始值设置为 1,这样每次就只允许一个应用使用 LED灯。
3、编写测试 APP
新建名为 atomicApp.c 的测试 APP,在里面输入如下所示内容:
atomicApp.c
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
/***************************************************************
文件名 : atomicApp.c
描述 : 原子变量测试APP,测试原子变量能不能实现一次只允许一个应用程序使用LED。
使用方法 :./atomicApp /dev/gpioled 0 关闭LED灯./atomicApp /dev/gpioled 1 打开LED灯
论坛 : www.openedv.com
日志 : 初版V1.0 2019/1/30 左忠凯创建
***************************************************************/#define LEDOFF 0
#define LEDON 1/** @description : main主程序* @param - argc : argv数组元素个数* @param - argv : 具体参数* @return : 0 成功;其他 失败*/
int main(int argc, char *argv[])
{int fd, retvalue;char *filename;unsigned char cnt = 0;unsigned char databuf[1];if(argc != 3){printf("Error Usage!\r\n");return -1;}filename = argv[1];/* 打开beep驱动 */fd = open(filename, O_RDWR);if(fd < 0){printf("file %s open failed!\r\n", argv[1]);return -1;}databuf[0] = atoi(argv[2]); /* 要执行的操作:打开或关闭 *//* 向/dev/gpioled文件写入数据 */retvalue = write(fd, databuf, sizeof(databuf));if(retvalue < 0){printf("LED Control Failed!\r\n");close(fd);return -1;}/* 模拟占用25S LED */while(1) {sleep(5);cnt++;printf("App running times:%d\r\n", cnt);if(cnt >= 5) break;}printf("App running finished!");retvalue = close(fd); /* 关闭文件 */if(retvalue < 0){printf("file %s close failed!\r\n", argv[1]);return -1;}return 0;
}
atomicApp.c 中的内容就是在《【Linux驱动开发】pinctrl 和 gpio 子系统实验》的 ledAPP.c 的基础上修改而来的,重点是加入了第 60~64 行的模拟占用 25 秒 LED 的代码。测试 APP 在获取到 LED 灯驱动的使用权以后会使用 25S,在使用的这段时间如果有其他的应用也去获取 LED 灯使用权的话肯定会失败!
1.2 运行测试
1、编译驱动程序
编写 Makefile 文件,本章实验的 Makefile 文件和之前的基本一样,只是将 obj-m 变量的值改为 atomic.o,Makefile 内容如下所示:
KERNELDIR := /home/linux/IMX6ULL/linux/temp/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek
CURRENT_PATH := $(shell pwd)obj-m := atomic.obuild: kernel_moduleskernel_modules:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modulesclean:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
第 4 行,设置 obj-m 变量的值为 atomic.o。
输入如下命令编译出驱动模块文件:
make -j32
编译成功以后就会生成一个名为“atomic.ko”的驱动模块文件。
2、编译测试 APP
输入如下命令编译测试 atomicApp.c 这个测试程序:
arm-linux-gnueabihf-gcc atomicApp.c -o atomicApp
编译成功以后就会生成 atomicApp 这个应用程序。
3、运行测试
将编译出来的 atomic.ko 和 atomicApp 这两个文件拷贝到 rootfs/lib/modules/4.1.15目录中,重启开发板,进入到目录 lib/modules/4.1.15 中,输入如下命令加载 atomic.ko 驱动模块:
depmod //第一次加载驱动的时候需要运行此命令
modprobe atomic.ko //加载驱动
驱动加载成功以后就可以使用 atomicApp 软件来测试驱动是否工作正常,输入如下命令以后台运行模式打开 LED 灯,“&”表示在后台运行 atomicApp 这个软件:
./atomicApp /dev/gpioled 1& //打开 LED 灯
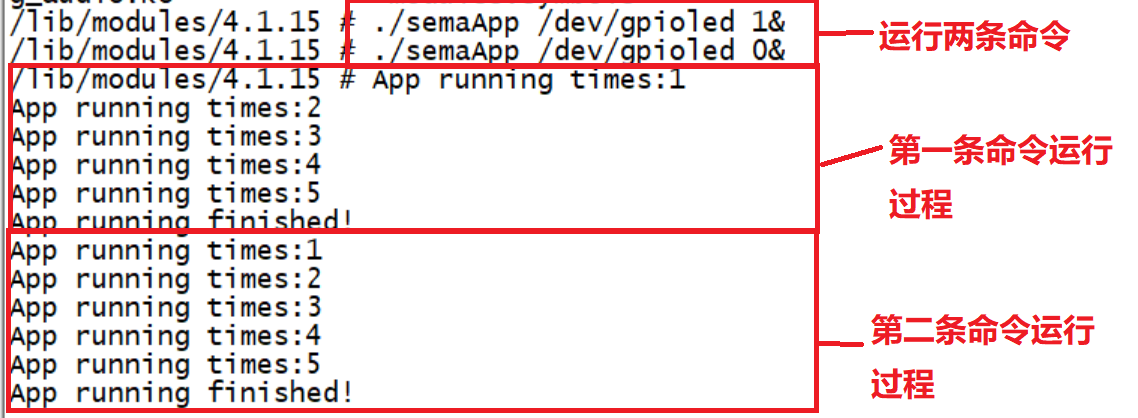
输入上述命令以后观察开发板上的红色 LED 灯是否点亮,然后每隔 5 秒都会输出一行“App running times ”,如图所示:

从图可以看出,atomicApp 运行正常,输出了“App running times:1”和“App running times:2”,这就是模拟 25S 占用,说明 atomicApp 这个软件正在使用 LED 灯。此时再输入如下命令关闭 LED 灯:
./atomicApp /dev/gpioled 0 //关闭 LED 灯
输入上述命令以后会发现如图所示输入信息:

从图可以看出,打开/dev/gpioled 失败!原因是在上上中运行的 atomicAPP软件正在占用/dev/gpioled,如果再次运行 atomicApp 软件去操作/dev/gpioled 肯定会失败。必须等待上上中的atomicApp运行结束,也就是25S结束以后其他软件才能去操作/dev/gpioled。
这个就是采用原子变量实现一次只能有一个应用程序访问 LED 灯。
如果要卸载驱动的话输入如下命令即可:
rmmod atomic.ko
2.自旋锁实验
上一节我们使用原子变量实现了一次只能有一个应用程序访问 LED 灯,本节我们使用自旋锁来实现此功能。在使用自旋锁之前,先回顾一下自旋锁的使用注意事项:
①、自旋锁保护的临界区要尽可能的短,因此在 open 函数中申请自旋锁,然后在 release 函数中释放自旋锁的方法就不可取。我们可以使用一个变量来表示设备的使用情况,如果设备被使用了那么变量就加一,设备被释放以后变量就减 1,我们只需要使用自旋锁保护这个变量即可。
②、考虑驱动的兼容性,合理的选择 API 函数。
综上所述,在本节例程中,我们通过定义一个变量 dev_stats 表示设备的使用情况,dev_stats为 0 的时候表示设备没有被使用,dev_stats 大于 0 的时候表示设备被使用。驱动 open 函数中先判断 dev_stats 是否为 0,也就是判断设备是否可用,如果为 0 的话就使用设备,并且将 dev_stats加 1,表示设备被使用了。使用完以后在 release 函数中将 dev_stats 减 1,表示设备没有被使用了。因此真正实现设备互斥访问的是变量 dev_stats,但是我们要使用自旋锁对 dev_stats 来做保护。
2.1 实验程序编写
1、修改设备树文件
因为本章实验是在《【Linux驱动开发】pinctrl 和 gpio 子系统实验》的基础上完成的,因此不需要对设备树做任何的修改。
2、LED 驱动修改
本节实验在第上一节实验驱动文件 atomic.c 的基础上修改而来。重命名为 spinlock.c。将原来使用 atomic 的地方换为 spinlock 即可,其他代码不需要修改,完成以后的 spinlock.c 文件内容如下所示(有省略):
spinlock.c
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>#define GPIOLED_CNT 1 /* 设备号个数 */
#define GPIOLED_NAME "gpioled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 *//* gpioled设备结构体 */
struct gpioled_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */int minor; /* 次设备号 */struct device_node *nd; /* 设备节点 */int led_gpio; /* led所使用的GPIO编号 */int dev_stats; /* 设备使用状态,0,设备未使用;>0,设备已经被使用 */spinlock_t lock; /* 自旋锁 */
};struct gpioled_dev gpioled; /* led设备 *//** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int led_open(struct inode *inode, struct file *filp)
{unsigned long flags;filp->private_data = &gpioled; /* 设置私有数据 */spin_lock_irqsave(&gpioled.lock, flags); /* 上锁 */if (gpioled.dev_stats) { /* 如果设备被使用了 */spin_unlock_irqrestore(&gpioled.lock, flags);/* 解锁 */return -EBUSY;}gpioled.dev_stats++; /* 如果设备没有打开,那么就标记已经打开了 */spin_unlock_irqrestore(&gpioled.lock, flags);/* 解锁 */return 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{return 0;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue;unsigned char databuf[1];unsigned char ledstat;struct gpioled_dev *dev = filp->private_data;retvalue = copy_from_user(databuf, buf, cnt);if(retvalue < 0) {printk("kernel write failed!\r\n");return -EFAULT;}ledstat = databuf[0]; /* 获取状态值 */if(ledstat == LEDON) { gpio_set_value(dev->led_gpio, 0); /* 打开LED灯 */} else if(ledstat == LEDOFF) {gpio_set_value(dev->led_gpio, 1); /* 关闭LED灯 */}return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int led_release(struct inode *inode, struct file *filp)
{unsigned long flags;struct gpioled_dev *dev = filp->private_data;/* 关闭驱动文件的时候将dev_stats减1 */spin_lock_irqsave(&dev->lock, flags); /* 上锁 */if (dev->dev_stats) {dev->dev_stats--;}spin_unlock_irqrestore(&dev->lock, flags);/* 解锁 */return 0;
}/* 设备操作函数 */
static struct file_operations gpioled_fops = {.owner = THIS_MODULE,.open = led_open,.read = led_read,.write = led_write,.release = led_release,
};/** @description : 驱动入口函数* @param : 无* @return : 无*/
static int __init led_init(void)
{int ret = 0;/* 初始化自旋锁 */spin_lock_init(&gpioled.lock);/* 设置LED所使用的GPIO *//* 1、获取设备节点:gpioled */gpioled.nd = of_find_node_by_path("/gpioled");if(gpioled.nd == NULL) {printk("gpioled node not find!\r\n");return -EINVAL;} else {printk("gpioled node find!\r\n");}/* 2、 获取设备树中的gpio属性,得到LED所使用的LED编号 */gpioled.led_gpio = of_get_named_gpio(gpioled.nd, "led-gpio", 0);if(gpioled.led_gpio < 0) {printk("can't get led-gpio");return -EINVAL;}printk("led-gpio num = %d\r\n", gpioled.led_gpio);/* 3、设置GPIO1_IO03为输出,并且输出高电平,默认关闭LED灯 */ret = gpio_direction_output(gpioled.led_gpio, 1);if(ret < 0) {printk("can't set gpio!\r\n");}/* 注册字符设备驱动 *//* 1、创建设备号 */if (gpioled.major) { /* 定义了设备号 */gpioled.devid = MKDEV(gpioled.major, 0);register_chrdev_region(gpioled.devid, GPIOLED_CNT, GPIOLED_NAME);} else { /* 没有定义设备号 */alloc_chrdev_region(&gpioled.devid, 0, GPIOLED_CNT, GPIOLED_NAME); /* 申请设备号 */gpioled.major = MAJOR(gpioled.devid); /* 获取分配号的主设备号 */gpioled.minor = MINOR(gpioled.devid); /* 获取分配号的次设备号 */}printk("gpioled major=%d,minor=%d\r\n",gpioled.major, gpioled.minor); /* 2、初始化cdev */gpioled.cdev.owner = THIS_MODULE;cdev_init(&gpioled.cdev, &gpioled_fops);/* 3、添加一个cdev */cdev_add(&gpioled.cdev, gpioled.devid, GPIOLED_CNT);/* 4、创建类 */gpioled.class = class_create(THIS_MODULE, GPIOLED_NAME);if (IS_ERR(gpioled.class)) {return PTR_ERR(gpioled.class);}/* 5、创建设备 */gpioled.device = device_create(gpioled.class, NULL, gpioled.devid, NULL, GPIOLED_NAME);if (IS_ERR(gpioled.device)) {return PTR_ERR(gpioled.device);}return 0;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit led_exit(void)
{/* 注销字符设备驱动 */cdev_del(&gpioled.cdev);/* 删除cdev */unregister_chrdev_region(gpioled.devid, GPIOLED_CNT); /* 注销设备号 */device_destroy(gpioled.class, gpioled.devid);class_destroy(gpioled.class);
}module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("jvmao");
第 34 行,dev_stats 表示设备状态,如果为 0 的话表示设备还没有被使用,如果大于 0 的话就表示设备已经被使用了。
第 35 行,定义自旋锁变量 lock。
第 52~58 行,使用自旋锁实现对设备的互斥访问,第 52 行调用 spin_lock_irqsave 函数获取锁,为了考虑到驱动兼容性,这里并没有使用 spin_lock 函数来获取锁。第 53 行判断dev_stats 是否大于 0,如果是的话表示设备已经被使用了,那么就调用spin_unlock_irqrestore函数释放锁,并且返回-EBUSY。如果设备没有被使用的话就在第 57 行将 dev_stats 加 1,表示设备要被使用了,然后调用 spin_unlock_irqrestore 函数释放锁。自旋锁的工作就是保护dev_stats 变量,真正实现对设备互斥访问的是 dev_stats。
第 117~124 行,在 release 函数中将 dev_stats 减 1,表示设备被释放了,可以被其他的应用程序使用。将 dev_stats 减 1 的时候需要自旋锁对其进行保护。
第 146 行,在驱动入口函数 led_init 中调用 spin_lock_init 函数初始化自旋锁。
3、编写测试 APP
测试 APP 使用1.2小节中的 atomicApp.c 即可,将 7_atomic 中的 atomicApp.c 文件到本例程中,并将 atomicApp.c 重命名为 spinlockApp.c 即可。
2.2 运行测试
1、编译驱动程序
编写 Makefile 文件,将 obj-m 变量的值改为 spinlock.o,Makefile 内容如下所示:
KERNELDIR := /home/linux/IMX6ULL/linux/temp/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek
CURRENT_PATH := $(shell pwd)obj-m := spinlock.obuild: kernel_moduleskernel_modules:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modulesclean:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
第 4 行,设置 obj-m 变量的值为 spinlock.o。
输入如下命令编译出驱动模块文件:
make -j32
编译成功以后就会生成一个名为“spinlock.ko”的驱动模块文件。
2、编译测试 APP
输入如下命令编译测试 spinlockApp.c 这个测试程序:
arm-linux-gnueabihf-gcc spinlockApp.c -o spinlockApp
编译成功以后就会生成 spinlockApp 这个应用程序。
3、运行测试
将编译出来的 spinlock.ko 和 spinlockApp 这两个文件拷贝到rootfs/lib/modules/4.1.15 目录中,重启开发板,进入到目录lib/modules/4.1.15 中,输入如下命令加载 spinlock.ko 驱动模块:
depmod //第一次加载驱动的时候需要运行此命令
modprobe spinlock.ko //加载驱动
驱动加载成功以后就可以使用 spinlockApp 软件测试驱动是否工作正常,测试方法和上小节中一样,先输入如下命令让 spinlockAPP 软件模拟占用 25S 的 LED 灯:
./spinlockApp /dev/gpioled 1& //打开 LED 灯
紧接着再输入如下命令关闭 LED 灯:
./spinlockApp /dev/gpioled 0 //关闭 LED 灯
看一下能不能关闭 LED 灯,驱动正常工作的话并不会马上关闭 LED 灯,会提示你“file /dev/gpioled open failed!”,必须等待第一个 spinlockApp 软件运行完成(25S 计时结束)才可以再次操作 LED 灯。
如果要卸载驱动的话输入如下命令即可:
rmmod spinlock.ko
3.信号量实验
本节我们来使用信号量实现了一次只能有一个应用程序访问 LED 灯,信号量可以导致休眠,因此信号量保护的临界区没有运行时间限制,可以在驱动的 open 函数申请信号量,然后在release 函数中释放信号量。但是信号量不能用在中断中,本节实验我们不会在中断中使用信号量。
3.1 实验程序编写
1、修改设备树文件
本章实验是在上一节实验的基础上完成的,同样不需要对设备树做任何的修改。
2、LED 驱动修改
本节实验在第上一节实验驱动文件 spinlock.c 的基础上修改而来。重命名为 semaphore.c。将原来使用到自旋锁的地方换为信号量即可,其他的内容基本不变,完成以后的 semaphore.c 文件内容如下所示(有省略):
semaphore.c
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>//信号量头文件
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>#define GPIOLED_CNT 1 /* 设备号个数 */
#define GPIOLED_NAME "gpioled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 *//* gpioled设备结构体 */
struct gpioled_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */int minor; /* 次设备号 */struct device_node *nd; /* 设备节点 */int led_gpio; /* led所使用的GPIO编号 */struct semaphore sem; /* 信号量 */
};struct gpioled_dev gpioled; /* led设备 *//** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int led_open(struct inode *inode, struct file *filp)
{filp->private_data = &gpioled; /* 设置私有数据 *//* 获取信号量 */if (down_interruptible(&gpioled.sem)) { /* 获取信号量,进入休眠状态的进程可以被信号打断 */return -ERESTARTSYS;}
#if 0down(&gpioled.sem); /* 不能被信号打断 */
#endifreturn 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{return 0;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue;unsigned char databuf[1];unsigned char ledstat;struct gpioled_dev *dev = filp->private_data;retvalue = copy_from_user(databuf, buf, cnt);if(retvalue < 0) {printk("kernel write failed!\r\n");return -EFAULT;}ledstat = databuf[0]; /* 获取状态值 */if(ledstat == LEDON) { gpio_set_value(dev->led_gpio, 0); /* 打开LED灯 */} else if(ledstat == LEDOFF) {gpio_set_value(dev->led_gpio, 1); /* 关闭LED灯 */}return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int led_release(struct inode *inode, struct file *filp)
{struct gpioled_dev *dev = filp->private_data;up(&dev->sem); /* 释放信号量,信号量值加1 */return 0;
}/* 设备操作函数 */
static struct file_operations gpioled_fops = {.owner = THIS_MODULE,.open = led_open,.read = led_read,.write = led_write,.release = led_release,
};/** @description : 驱动入口函数* @param : 无* @return : 无*/
static int __init led_init(void)
{int ret = 0;/* 初始化信号量 */sema_init(&gpioled.sem, 1);/* 设置LED所使用的GPIO *//* 1、获取设备节点:gpioled */gpioled.nd = of_find_node_by_path("/gpioled");if(gpioled.nd == NULL) {printk("gpioled node not find!\r\n");return -EINVAL;} else {printk("gpioled node find!\r\n");}/* 2、 获取设备树中的gpio属性,得到LED所使用的LED编号 */gpioled.led_gpio = of_get_named_gpio(gpioled.nd, "led-gpio", 0);if(gpioled.led_gpio < 0) {printk("can't get led-gpio");return -EINVAL;}printk("led-gpio num = %d\r\n", gpioled.led_gpio);/* 3、设置GPIO1_IO03为输出,并且输出高电平,默认关闭LED灯 */ret = gpio_direction_output(gpioled.led_gpio, 1);if(ret < 0) {printk("can't set gpio!\r\n");}/* 注册字符设备驱动 *//* 1、创建设备号 */if (gpioled.major) { /* 定义了设备号 */gpioled.devid = MKDEV(gpioled.major, 0);register_chrdev_region(gpioled.devid, GPIOLED_CNT, GPIOLED_NAME);} else { /* 没有定义设备号 */alloc_chrdev_region(&gpioled.devid, 0, GPIOLED_CNT, GPIOLED_NAME); /* 申请设备号 */gpioled.major = MAJOR(gpioled.devid); /* 获取分配号的主设备号 */gpioled.minor = MINOR(gpioled.devid); /* 获取分配号的次设备号 */}printk("gpioled major=%d,minor=%d\r\n",gpioled.major, gpioled.minor); /* 2、初始化cdev */gpioled.cdev.owner = THIS_MODULE;cdev_init(&gpioled.cdev, &gpioled_fops);/* 3、添加一个cdev */cdev_add(&gpioled.cdev, gpioled.devid, GPIOLED_CNT);/* 4、创建类 */gpioled.class = class_create(THIS_MODULE, GPIOLED_NAME);if (IS_ERR(gpioled.class)) {return PTR_ERR(gpioled.class);}/* 5、创建设备 */gpioled.device = device_create(gpioled.class, NULL, gpioled.devid, NULL, GPIOLED_NAME);if (IS_ERR(gpioled.device)) {return PTR_ERR(gpioled.device);}return 0;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit led_exit(void)
{/* 注销字符设备驱动 */cdev_del(&gpioled.cdev);/* 删除cdev */unregister_chrdev_region(gpioled.devid, GPIOLED_CNT); /* 注销设备号 */device_destroy(gpioled.class, gpioled.devid);class_destroy(gpioled.class);
}module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("jvmao");
第 14 行,要使用信号量必须添加<linux/semaphore.h>头文件。
第 34 行,在设备结构体中添加一个信号量成员变量 sem。
第50~56行,在open函数中申请信号量,可以使用down函数,也可以使用down_interruptible函数。如果信号量值大于等于 1 就表示可用,那么应用程序就会开始使用 LED 灯。如果信号量值为 0 就表示应用程序不能使用 LED 灯,此时应用程序就会进入到休眠状态。等到信号量值大于 1 的时候应用程序就会唤醒,申请信号量,获取 LED 灯使用权。
第 114 行,在 release 函数中调用 up 函数释放信号量,这样其他因为没有得到信号量而进入休眠状态的应用程序就会唤醒,获取信号量。
第 138 行,在驱动入口函数中调用 sema_init 函数初始化信号量 sem 的值为 1,相当于 sem是个二值信号量。
总结一下,当信号量 sem 为 1 的时候表示 LED 灯还没有被使用,如果应用程序 A 要使用LED 灯,先调用 open 函数打开/dev/gpioled,这个时候会获取信号量 sem,获取成功以后 sem 的值减 1 变为 0。如果此时应用程序 B 也要使用 LED 灯,调用 open 函数打开/dev/gpioled 就会因为信号量无效(值为 0)而进入休眠状态。当应用程序 A 运行完毕,调用 close 函数关闭/dev/gpioled的时候就会释放信号量 sem,此时信号量 sem 的值就会加 1,变为 1。信号量 sem 再次有效,表示其他应用程序可以使用 LED 灯了,此时在休眠状态的应用程序 B 就会获取到信号量 sem,获取成功以后就开始使用 LED 灯。
3、编写测试 APP
测试 APP 用上一小节中的 atomicApp.c 即可,将 7_atomic 中的 atomicApp.c 文件到本例程中,并将 atomicApp.c 重命名为 semaApp.c 即可。
semaApp.c
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
/***************************************************************
文件名 : atomicApp.c
描述 : 原子变量测试APP,测试原子变量能不能实现一次只允许一个应用程序使用LED。
使用方法 :./atomicApp /dev/gpioled 0 关闭LED灯./atomicApp /dev/gpioled 1 打开LED灯
论坛 : www.openedv.com
日志 : 初版V1.0 2019/1/30 左忠凯创建
***************************************************************/#define LEDOFF 0
#define LEDON 1/** @description : main主程序* @param - argc : argv数组元素个数* @param - argv : 具体参数* @return : 0 成功;其他 失败*/
int main(int argc, char *argv[])
{int fd, retvalue;char *filename;unsigned char cnt = 0;unsigned char databuf[1];if(argc != 3){printf("Error Usage!\r\n");return -1;}filename = argv[1];/* 打开beep驱动 */fd = open(filename, O_RDWR);if(fd < 0){printf("file %s open failed!\r\n", argv[1]);return -1;}databuf[0] = atoi(argv[2]); /* 要执行的操作:打开或关闭 *//* 向/dev/gpioled文件写入数据 */retvalue = write(fd, databuf, sizeof(databuf));if(retvalue < 0){printf("LED Control Failed!\r\n");close(fd);return -1;}/* 模拟占用25S LED */while(1) {sleep(5);cnt++;printf("App running times:%d\r\n", cnt);if(cnt >= 5) break;}printf("App running finished!");retvalue = close(fd); /* 关闭文件 */if(retvalue < 0){printf("file %s close failed!\r\n", argv[1]);return -1;}return 0;
}
3.2 运行测试
1、编译驱动程序
编写 Makefile 文件,将 obj-m 变量的值改为 semaphore.o,Makefile 内容如下所示:
KERNELDIR := /home/linux/IMX6ULL/linux/temp/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek
CURRENT_PATH := $(shell pwd)obj-m := semaphore.obuild: kernel_moduleskernel_modules:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modulesclean:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
第 4 行,设置 obj-m 变量的值为 semaphore.o。
输入如下命令编译出驱动模块文件:
make -j32
编译成功以后就会生成一个名为“semaphore.ko”的驱动模块文件。
2、编译测试 APP
输入如下命令编译测试 semaApp.c 这个测试程序:
arm-linux-gnueabihf-gcc semaApp.c -o semaApp
编译成功以后就会生成 semaApp 这个应用程序。
3、运行测试
将上一小节编译出来的 semaphore.ko 和 semaApp 这 两 个 文 件 拷 贝 到rootfs/lib/modules/4.1.15 目录中,重启开发板,进入到目录 lib/modules/4.1.15 中,输入如下命令加载 semaphore.ko 驱动模块:
depmod //第一次加载驱动的时候需要运行此命令
modprobe semaphore.ko//加载驱动
驱动加载成功以后就可以使用 semaApp 软件测试驱动是否工作正常,先输入如下命令让 semaApp 软件模拟占用 25S 的 LED 灯:
./ semaApp /dev/gpioled 1& //打开 LED 灯
紧接着再输入如下命令关闭 LED 灯:
./ semaApp /dev/gpioled 0& //关闭 LED 灯
注意两个命令都是运行在后台,第一条命令先获取到信号量,因此可以操作 LED 灯,将LED 灯打开,并且占有 25S。第二条命令因为获取信号量失败而进入休眠状态,等待第一条命令运行完毕并释放信号量以后才拥有 LED 灯使用权,将 LED 灯关闭,运行结果如图所示:
如果要卸载驱动的话输入如下命令即可:
rmmod semaphore.ko
4.互斥体实验
前面我们使用原子操作、自旋锁和信号量实现了对 LED 灯的互斥访问,但是最适合互斥的就是互斥体 mutex 了。本节我们来学习一下如何使用 mutex 实现对 LED 灯的互斥访问。
4.1 实验程序编写
1、修改设备树文件
本章实验是在上一节实验的基础上完成的,同样不需要对设备树做任何的修改。
2、LED 驱动修改
本节实验在上一节实验驱动文件 semaphore.c 的基础上修改而来。重命名为 mutex.c。将原来使用到信号量的地方换为mutex即可,其他的内容基本不变,完成以后的 mutex.c 文件内容如下所示(有省略):
mutex.c
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>#define GPIOLED_CNT 1 /* 设备号个数 */
#define GPIOLED_NAME "gpioled" /* 名字 */
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 *//* gpioled设备结构体 */
struct gpioled_dev{dev_t devid; /* 设备号 */struct cdev cdev; /* cdev */struct class *class; /* 类 */struct device *device; /* 设备 */int major; /* 主设备号 */int minor; /* 次设备号 */struct device_node *nd; /* 设备节点 */int led_gpio; /* led所使用的GPIO编号 */struct mutex lock; /* 互斥体 */
};struct gpioled_dev gpioled; /* led设备 *//** @description : 打开设备* @param - inode : 传递给驱动的inode* @param - filp : 设备文件,file结构体有个叫做private_data的成员变量* 一般在open的时候将private_data指向设备结构体。* @return : 0 成功;其他 失败*/
static int led_open(struct inode *inode, struct file *filp)
{filp->private_data = &gpioled; /* 设置私有数据 *//* 获取互斥体,可以被信号打断 */if (mutex_lock_interruptible(&gpioled.lock)) {return -ERESTARTSYS;}
#if 0mutex_lock(&gpioled.lock); /* 不能被信号打断 */
#endifreturn 0;
}/** @description : 从设备读取数据 * @param - filp : 要打开的设备文件(文件描述符)* @param - buf : 返回给用户空间的数据缓冲区* @param - cnt : 要读取的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 读取的字节数,如果为负值,表示读取失败*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{return 0;
}/** @description : 向设备写数据 * @param - filp : 设备文件,表示打开的文件描述符* @param - buf : 要写给设备写入的数据* @param - cnt : 要写入的数据长度* @param - offt : 相对于文件首地址的偏移* @return : 写入的字节数,如果为负值,表示写入失败*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{int retvalue;unsigned char databuf[1];unsigned char ledstat;struct gpioled_dev *dev = filp->private_data;retvalue = copy_from_user(databuf, buf, cnt);if(retvalue < 0) {printk("kernel write failed!\r\n");return -EFAULT;}ledstat = databuf[0]; /* 获取状态值 */if(ledstat == LEDON) { gpio_set_value(dev->led_gpio, 0); /* 打开LED灯 */} else if(ledstat == LEDOFF) {gpio_set_value(dev->led_gpio, 1); /* 关闭LED灯 */}return 0;
}/** @description : 关闭/释放设备* @param - filp : 要关闭的设备文件(文件描述符)* @return : 0 成功;其他 失败*/
static int led_release(struct inode *inode, struct file *filp)
{struct gpioled_dev *dev = filp->private_data;/* 释放互斥锁 */mutex_unlock(&dev->lock);return 0;
}/* 设备操作函数 */
static struct file_operations gpioled_fops = {.owner = THIS_MODULE,.open = led_open,.read = led_read,.write = led_write,.release = led_release,
};/** @description : 驱动入口函数* @param : 无* @return : 无*/
static int __init led_init(void)
{int ret = 0;/* 初始化互斥体 */mutex_init(&gpioled.lock);/* 设置LED所使用的GPIO *//* 1、获取设备节点:gpioled */gpioled.nd = of_find_node_by_path("/gpioled");if(gpioled.nd == NULL) {printk("gpioled node not find!\r\n");return -EINVAL;} else {printk("gpioled node find!\r\n");}/* 2、 获取设备树中的gpio属性,得到LED所使用的LED编号 */gpioled.led_gpio = of_get_named_gpio(gpioled.nd, "led-gpio", 0);if(gpioled.led_gpio < 0) {printk("can't get led-gpio");return -EINVAL;}printk("led-gpio num = %d\r\n", gpioled.led_gpio);/* 3、设置GPIO1_IO03为输出,并且输出高电平,默认关闭LED灯 */ret = gpio_direction_output(gpioled.led_gpio, 1);if(ret < 0) {printk("can't set gpio!\r\n");}/* 注册字符设备驱动 *//* 1、创建设备号 */if (gpioled.major) { /* 定义了设备号 */gpioled.devid = MKDEV(gpioled.major, 0);register_chrdev_region(gpioled.devid, GPIOLED_CNT, GPIOLED_NAME);} else { /* 没有定义设备号 */alloc_chrdev_region(&gpioled.devid, 0, GPIOLED_CNT, GPIOLED_NAME); /* 申请设备号 */gpioled.major = MAJOR(gpioled.devid); /* 获取分配号的主设备号 */gpioled.minor = MINOR(gpioled.devid); /* 获取分配号的次设备号 */}printk("gpioled major=%d,minor=%d\r\n",gpioled.major, gpioled.minor); /* 2、初始化cdev */gpioled.cdev.owner = THIS_MODULE;cdev_init(&gpioled.cdev, &gpioled_fops);/* 3、添加一个cdev */cdev_add(&gpioled.cdev, gpioled.devid, GPIOLED_CNT);/* 4、创建类 */gpioled.class = class_create(THIS_MODULE, GPIOLED_NAME);if (IS_ERR(gpioled.class)) {return PTR_ERR(gpioled.class);}/* 5、创建设备 */gpioled.device = device_create(gpioled.class, NULL, gpioled.devid, NULL, GPIOLED_NAME);if (IS_ERR(gpioled.device)) {return PTR_ERR(gpioled.device);}return 0;
}/** @description : 驱动出口函数* @param : 无* @return : 无*/
static void __exit led_exit(void)
{/* 注销字符设备驱动 */cdev_del(&gpioled.cdev);/* 删除cdev */unregister_chrdev_region(gpioled.devid, GPIOLED_CNT); /* 注销设备号 */device_destroy(gpioled.class, gpioled.devid);class_destroy(gpioled.class);
}module_init(led_init);
module_exit(led_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("jvmao");
第 43 行,定义互斥体 lock。
第 60~65 行,在 open 函数中调用 mutex_lock_interruptible 或者 mutex_lock 获取 mutex,成功的话就表示可以使用 LED 灯,失败的话就会进入休眠状态,和信号量一样。
第 124 行,在 release 函数中调用 mutex_unlock 函数释放 mutex,这样其他应用程序就可以获取 mutex 了。
第 148 行,在驱动入口函数中调用 mutex_init 初始化 mutex。
互斥体和二值信号量类似,只不过互斥体是专门用于互斥访问的。
3、编写测试 APP
测试 APP 使用上一小节中的 atomicApp.c 即可,将 7_atomic 中的 atomicApp.c 文件到本例程中,并将 atomicApp.c 重命名为 mutexApp.c 即可。
4.2 运行测试
1、编译驱动程序
编写 Makefile 文件,将 obj-m 变量的值改为 mutex.o,Makefile 内容如下所示:
KERNELDIR := /home/zuozhongkai/linux/IMX6ULL/linux/temp/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek
CURRENT_PATH := $(shell pwd)obj-m := mutex.obuild: kernel_moduleskernel_modules:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modulesclean:$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
第 4 行,设置 obj-m 变量的值为 mutex.o。
输入如下命令编译出驱动模块文件:
make -j32
编译成功以后就会生成一个名为“mutex.ko”的驱动模块文件。
2、编译测试 APP
输入如下命令编译测试 mutexApp.c 这个测试程序:
arm-linux-gnueabihf-gcc mutexApp.c -o mutexApp
编译成功以后就会生成 mutexApp 这个应用程序。
3、运行测试
将上一小节编译出来的 mutex.ko 和 mutexApp 这两个文件拷贝到 rootfs/lib/modules/4.1.15目录中,重启开发板,进入到目录 lib/modules/4.1.15 中,输入如下命令加载 mutex.ko 驱动模块:
depmod //第一次加载驱动的时候需要运行此命令
modprobe mutex.ko //加载驱动
驱动加载成功以后就可以使用 mutexApp 软件测试驱动是否工作正常,测试方法和测试信号量的方法一样。
如果要卸载驱动的话输入如下命令即可:
rmmod mutex.ko
相关文章:
【Linux 并发与竞争实验】
【Linux 并发与竞争实验】 之前学习了四种常用的处理并发和竞争的机制:原子操作、自旋锁、信号量和互斥体。本章我们就通过四个实验来学习如何在驱动中使用这四种机制。 文章目录 【Linux 并发与竞争实验】1.原子操作实验1.1 实验程序编写1.2 运行测试 2.自旋锁实验…...

wx219基于ssm+vue+uniapp的教师管理系统小程序
开发语言:Java框架:ssmuniappJDK版本:JDK1.8服务器:tomcat7数据库:mysql 5.7(一定要5.7版本)数据库工具:Navicat11开发软件:eclipse/myeclipse/ideaMaven包:M…...
leetcode0079. 单词搜索-medium
1 题目: 单词搜索 官方标定难度:中 给定一个 m x n 二维字符网格 board 和一个字符串单词 word 。如果 word 存在于网格中,返回 true ;否则,返回 false 。 单词必须按照字母顺序,通过相邻的单元格内的字…...
SvelteKit 最新中文文档教程(20)—— 最佳实践之性能
前言 Svelte,一个语法简洁、入门容易,面向未来的前端框架。 从 Svelte 诞生之初,就备受开发者的喜爱,根据统计,从 2019 年到 2024 年,连续 6 年一直是开发者最感兴趣的前端框架 No.1: Svelte …...

在多系统环境中实现授权闭环,Tetra Pak 借助CodeMeter打造食品工业的安全自动化体系
一、 行业背景与安全新挑战 在食品加工自动化不断深化的背景下,食品安全、功能安全与知识产权保护的需求日益迫切。Tetra Pak 作为全球领先的食品加工和包装解决方案提供商,业务遍布 160 多个国家,涵盖从配料混合、碳酸化处理到全线自动包装。…...

复数概念的演进 3 —— 复数的意义
注:本文为 “从三次方程到复平面:复数概念的演进” 相关文章合辑。 因 csdn 篇幅限制分篇连载,此为第 3 篇。 生料合辑,同主题文章未整理去重。 机翻,未校。 Complex number and its discovery history 复数及其发…...

三菱PLC
三菱PLC通信协议及读写 引言 三菱PLC(Programmable Logic Controller,可编程逻辑控制器)是工业自动化领域中广泛使用的一款PLC品牌。三菱PLC支持多种通信协议,包括Modbus、Ethernet/IP、Melsec Net等。本文将详细介绍三菱PLC的通…...
B端可视化方案,如何助力企业精准决策,抢占市场先机
在当今竞争激烈的商业环境中,企业需要快速、准确地做出决策以抢占市场先机。B端可视化方案通过将复杂的企业数据转化为直观的图表和仪表盘,帮助企业管理层和业务人员快速理解数据背后的业务逻辑,从而做出精准决策。本文将深入探讨B端可视化方…...

0701表单组件-react-仿低代码平台项目
文章目录 1 react表单组件1.1 受控组件 (Controlled Components)示例代码: 1.2 非受控组件 (Uncontrolled Components)示例代码: 2 AntD表单组件实战2.1 开发搜索功能2.2 开发注册页2.3 开发登录页2.4 表单组件校验 结语 1 react表单组件 input表单组件…...
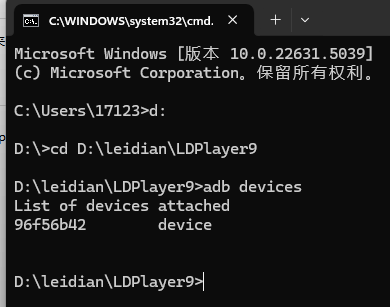
【adb】bat批处理+adb 自动亮屏,自动解锁屏幕,启动王者荣耀
准备adb 下载 需要确认是否安装了adb.exe文件,可以在: 任务管理器 -->详细信息–>找一下后台运行的adb 安装过anroid模拟器,也存在adb,例如:雷电安装目录 D:\leidian\LDPlayer9 单独下载adb 官方下载地址:[官方网址] 下载目录文件: 测试adb USB连接手机 首先在设置界…...
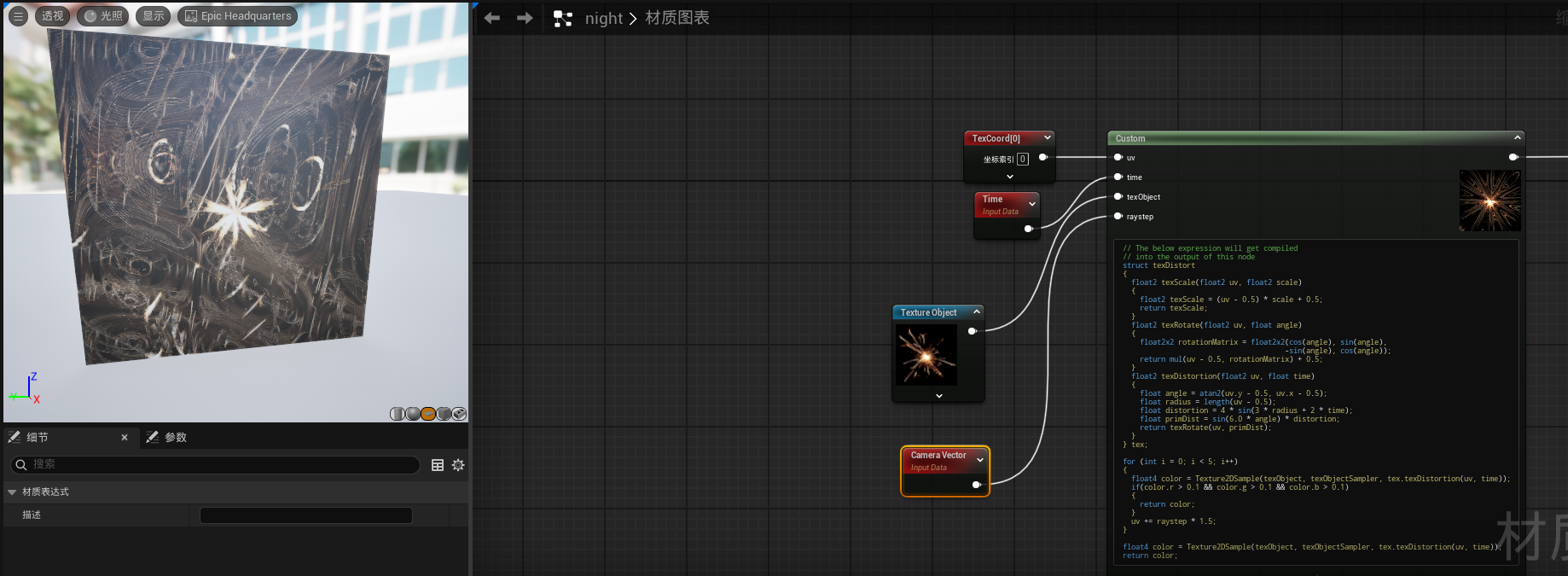
Distortion, Animation Raymarching
这节课的主要目的是对uv进行操作,实现一些动画的效果,实际就是采样的动画 struct texDistort {float2 texScale(float2 uv, float2 scale){float2 texScale (uv - 0.5) * scale 0.5;return texScale;}float2 texRotate(float2 uv, float angle){float…...
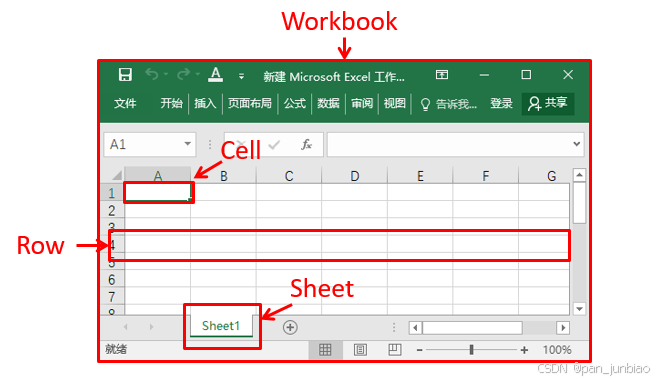
SpringBoot整合POI实现Excel文件的导出与导入
使用 Apache POI 操作 Excel文件,系列文章: 《SpringBoot整合POI实现Excel文件的导出与导入》 《SpringMVC实现文件的上传与下载》 《C#使用NPOI导出Excel文件》 《NPOI使用手册》 1、Apache POI 的介绍 Apache POI 是一个基于 Java 的开源库,专为读写 Microsoft Office 格…...
)
LeetCode 2537.统计好子数组的数目:滑动窗口(双指针)
【LetMeFly】2537.统计好子数组的数目:滑动窗口(双指针) 力扣题目链接:https://leetcode.cn/problems/count-the-number-of-good-subarrays/ 给你一个整数数组 nums 和一个整数 k ,请你返回 nums 中 好 子数组的数目。 一个子数组 arr 如果…...
矩阵基础+矩阵转置+矩阵乘法+行列式与逆矩阵
GPU渲染过程 矩阵 什么是矩阵(Matrix) 向量 (3,9,88) 点乘:计算向量夹角 叉乘:计算两个向量构成平面的法向量。 矩阵 矩阵有3行,2列,所以表示为M32 获取固…...
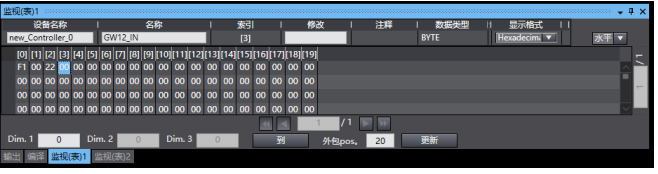
(EtherCAT 转 EtherNet/IP)EtherCAT/Ethernet/IP/Profinet/ModbusTCP协议互转工业串口网关
型号 协议转换通信网关 EtherCAT 转 EtherNet/IP MS-GW12 概述 MS-GW12 是 EtherCAT 和 EtherNet/IP 协议转换网关,为用户提供两种不同通讯协议的 PLC 进行数据交互的解决方案,可以轻松容易将 EtherNet/IP 网络接入 EtherCAT 网络中,方便…...
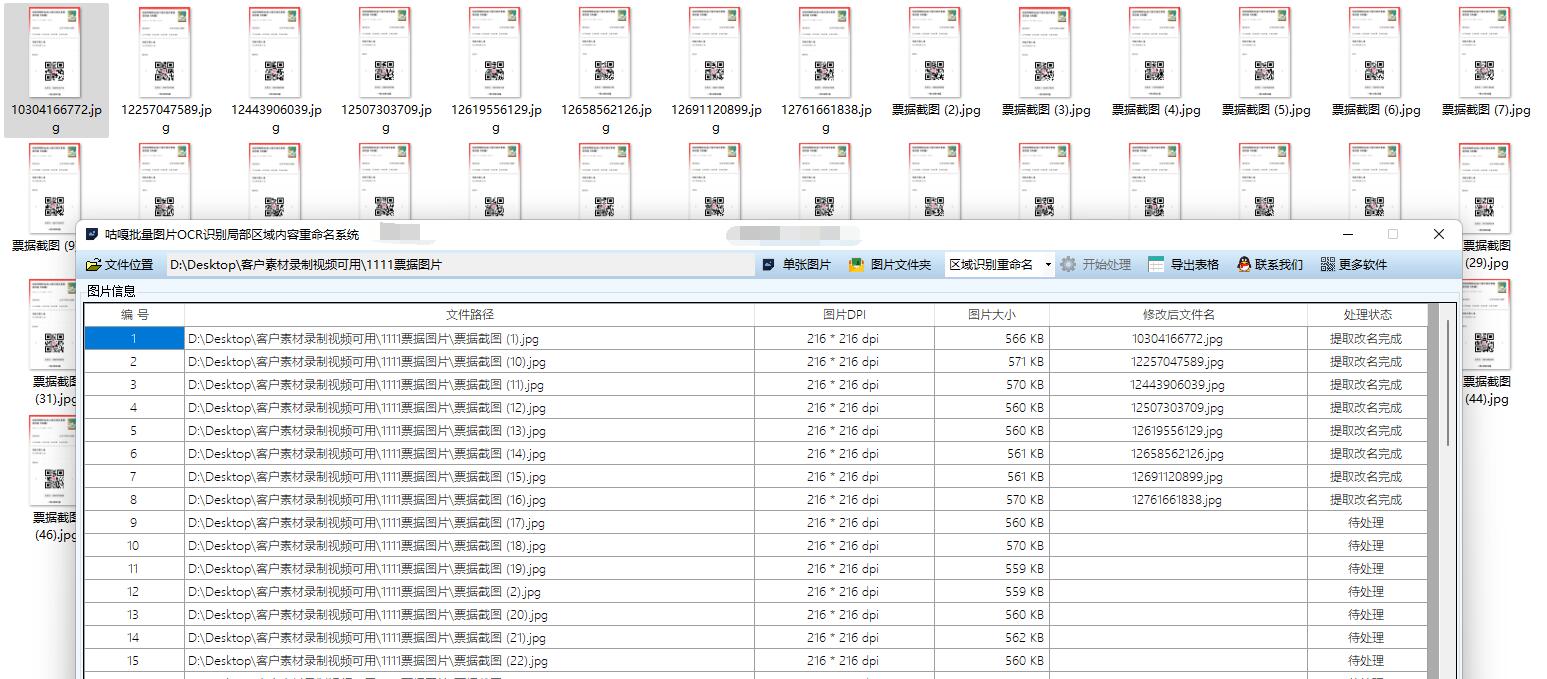
分享:批量提取图片文字并自动命名文件,ocr识别图片指定区域并重命名文件名工具,基于WPF和腾讯OCR识别的接口的视线方案
一、项目背景 在处理大量图片时,常常需要从图片中提取特定区域的文字信息,并依据这些信息对图片进行重命名。例如,在档案管理领域,大量纸质文件被扫描成图片后,需要从图片中提取关键信息(如文件编号、日期等)来重命名图片,以便后续的检索和管理;在电商领域,商家可能…...
Mysql读写分离(1)-服务器的设置(主从复制)
1.简介 随着网站访问和请求量的增加,单台数据库服务器的连接已耗尽,会出现连接请求还在等待,或是数据库服务器崩溃等现象,这时候我们考虑如何减少数据库的连接,可以通过优化代码、使用缓存、数据库读写分离等方式解决…...
STM32F103ZET6移植FATFS文件系统教程(W25Q32)
一、FATFS核心特性 跨平台支持 支持FAT12/FAT16/FAT32格式,兼容Windows文件系统; 采用标准C语言编写,代码量小且支持RTOS。 配置灵活性 通过宏定义实现功能裁剪,例如: FF_FS_READONLY:设为1时禁…...

STM32 模块化开发实战指南:系列介绍
本文是《STM32 模块化开发实战指南》系列的导读篇,旨在介绍整个系列的写作目的、适用读者、技术路径和每一篇的主题规划。适合从事 STM32、裸机或 RTOS 嵌入式开发的个人开发者、初创工程师或企业项目团队。 为什么要写这个系列? 在嵌入式开发中,很多人刚开始都是从点亮一个…...

AF3 create_alignment_db_sharded脚本create_shard函数解读
AlphaFold3 create_alignment_db_sharded 脚本在源代码的scripts/alignment_db_scripts文件夹下。 该脚本中的 create_shard 函数的功能是将一部分链(shard_files)中的所有对齐文件写入一个 .db 文件,并返回这些链的索引信息(字节…...

【Python语言基础】21、Python标准库
文章目录 1. 标准库1.1 标准库构成及特点1.2 常见分类和模块1.3 标准库使用 1. 标准库 Python 标准库就像是 Python 自带的 “百宝箱”,里面装了各种各样已经写好的工具,你在编程的时候可以直接拿来用,不用自己再费劲去编写。 什么是标准库 …...

数据库脱裤
假设你已经getshell 找到mysql账号密码。 网站要连接mysql,就需要把mysql的账号密码保存在一个php文件中,类似config.php、common.inc.php等,在shell中,读取这些文件,找到其中信息即可 下面是一些常见平台的配置文…...

信刻电子档案蓝光光盘刻录安全检测长期归档
信刻一直致力于为档案馆、各行业档案部门,提供跨网数据交换、电子档案数据磁光异质备份归档解决方案。所研制的电子档案光盘智能长期归档系统,满足国产环境下”刻、管、存、检、用”全生命周期管理应用需求,能够提供一份离线归档、一份近线存…...

vue3中,element-plus中el-input的v-model和value的用法示例
el-input的v-model,邦定响应式变量 <el-col :span"6"><el-form-item label"检验类别" prop"verifyType"><el-input v-model"applyAllInfo.applyBasicInfo.verifyTypeName" readonly /></el-form-item…...
)
文章记单词 | 第33篇(六级)
一,单词释义 poison [ˈpɔɪzn] n. 毒药;毒物;有害的思想(或心情等);vt. 毒死;毒害;下毒;在… 中放毒;污染;adj. 有毒的justification [ˌdʒʌ…...

深度学习算法:从基础到实践
简介 深度学习作为人工智能领域的一个重要分支,近年来在多个领域取得了显著的成就。本文将从基础概念出发,探讨深度学习算法的核心原理,并介绍一些实际应用案例。 深度学习算法的核心概念 深度学习算法基于人工神经网络,通过构…...

L2-052 吉利矩阵分
L2-052 吉利矩阵 - 团体程序设计天梯赛-练习集 所有元素为非负整数,且各行各列的元素和都等于 7 的 33 方阵称为“吉利矩阵”,因为这样的矩阵一共有 666 种。 本题就请你统计一下,把 7 换成任何一个 [2,9] 区间内的正整数 L,把矩…...

计算机网络中各种物理量的单位总结
在计算机网络中,数据速率的单位容易混淆,以下是清晰总结: 一、基本单位区分 比特(bit)与字节(Byte) 小写 b 表示 比特(bit),是数据传输的基本单位。 大写 B…...

Solidity私有函数和私有变量区别,私有变量可以被访问吗
web3面试题 私有函数和私有变量区别,私有变量可以被访问吗 ChatGPT said: 在 Web3 开发,尤其是使用 Solidity 编写智能合约时,关于私有函数和私有变量的区别是常见的面试题。下面是详细解析: ✅ 私有函数(Private Fu…...

解决JSON格式数据大小写问题,以及@JsonProperty 和@JSONField序列化的区别
1、JsonProperty注解方式 JsonProperty注解是annotation包下的一个注解,可以通过value属性定义注解修饰的属性名称,如果你用的是JsonProperty注解,那么你千万不要用JSONObject.toJSONString(实体)去转json,可能很多人在这里就蒙蔽…...